






基于卡尔曼滤波的永磁同步电机无传感器矢量控制,matlab,仿真模型。
ID:6765667935045527
专业电机控制
近年来,永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)在各行各业中得到了广泛的应用,尤其在工业领域中,其高效、高性能和高可靠性的特点使得其成为了首选。然而,传统的PMSM控制方法需要使用位置传感器来获取转子位置信息,以实现精确的控制。这不仅增加了系统的成本,而且还增加了系统的故障率。
为了解决这一问题,一种基于卡尔曼滤波的无传感器矢量控制方法被提出。该方法利用卡尔曼滤波器来实时估计转子位置和速度,从而实现无传感器的PMSM控制。在这种方法中,通过采集电机的电流和电压信号,结合永磁同步电机的数学模型,利用卡尔曼滤波算法对转子位置和速度进行实时估计。这样,就可以实现对永磁同步电机的无传感器矢量控制。
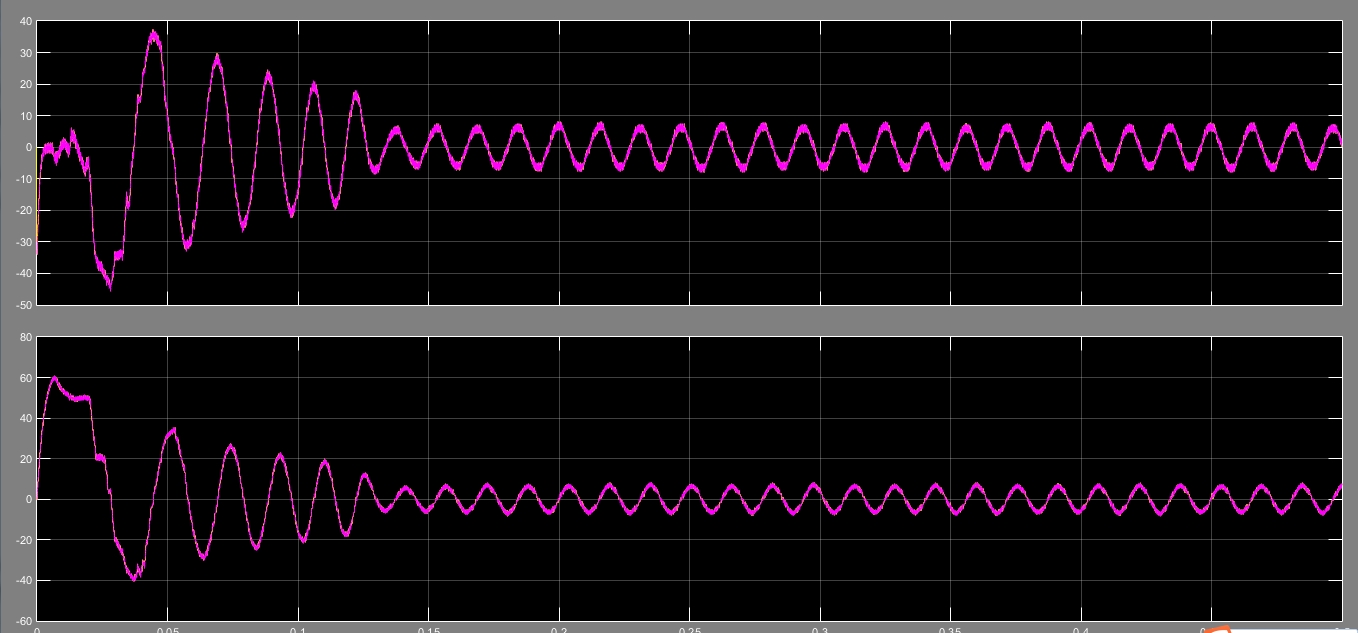
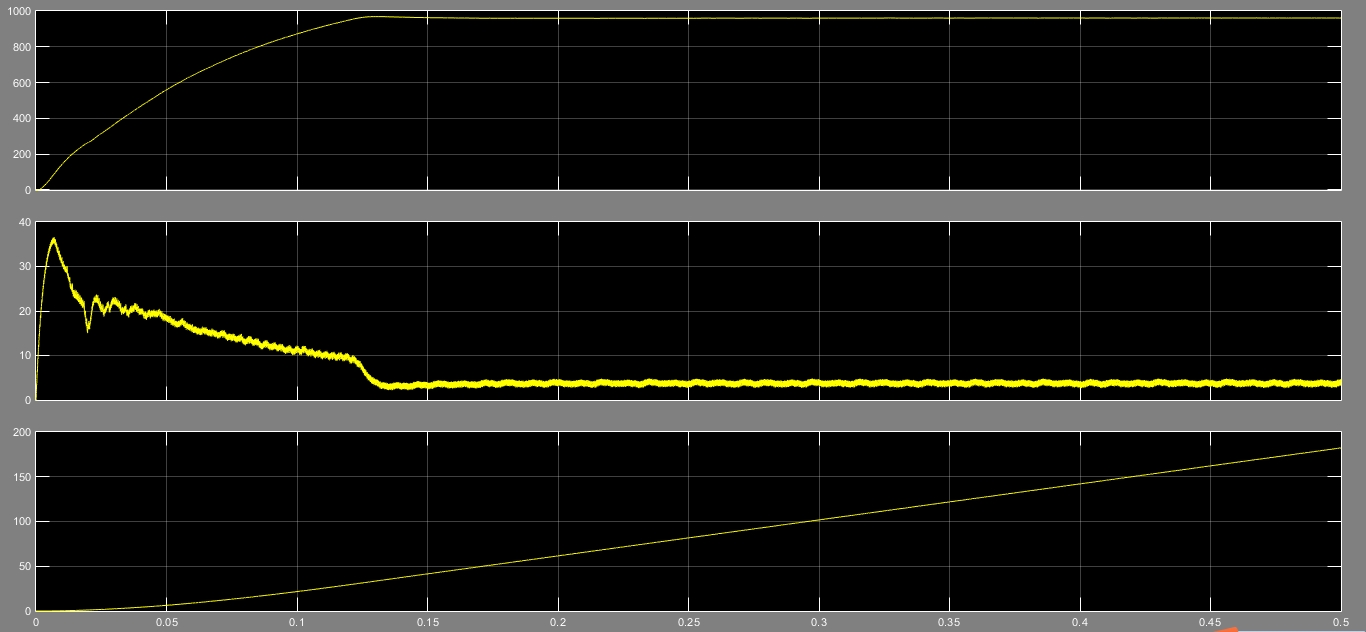
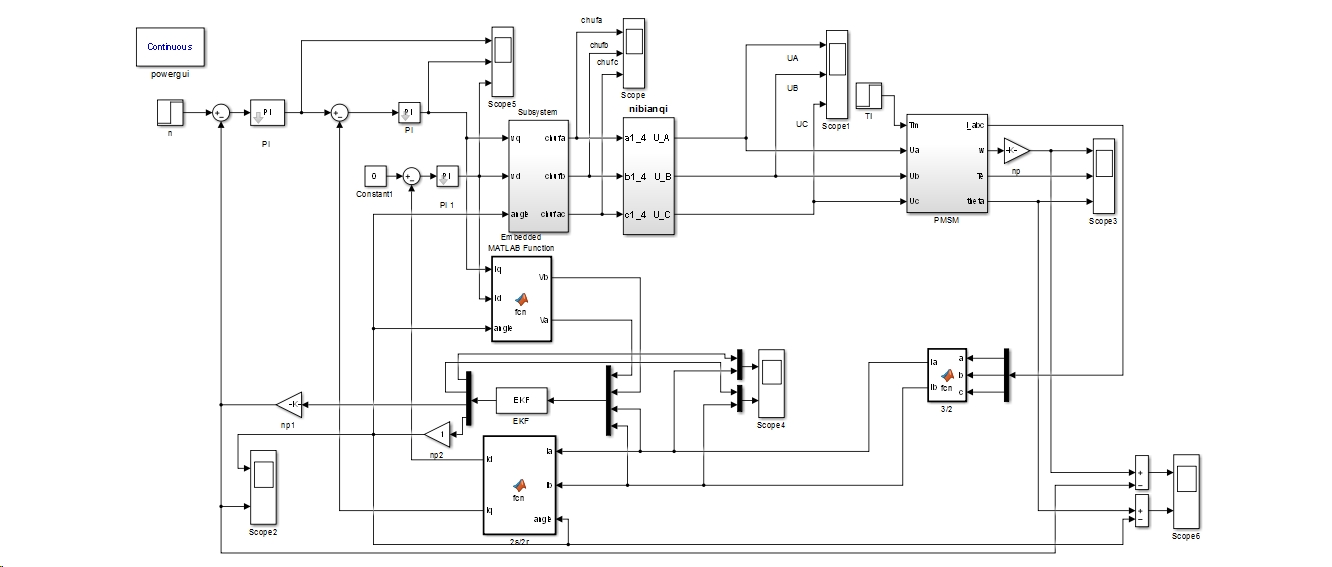
在具体的实现过程中,使用了Matlab软件搭建了仿真模型。首先,根据永磁同步电机的数学模型,建立了电机的状态空间方程。然后,根据卡尔曼滤波算法的原理,建立了卡尔曼滤波器的状态方程和观测方程。通过将这两个方程与永磁同步电机的状态空间方程进行联立,可以实现对转子位置和速度的实时估计。最后,通过对仿真模型进行仿真实验,验证了基于卡尔曼滤波的无传感器矢量控制方法的有效性和性能。
相比传统的PMSM控制方法,基于卡尔曼滤波的永磁同步电机无传感器矢量控制方法具有以下几个优点:
首先,无需使用额外的位置传感器,简化了系统的结构,降低了系统的成本。
其次,采用卡尔曼滤波算法实时估计转子位置和速度,能够更准确地反映电机的运行状态,实现更精确的控制。
再次,通过仿真模型的搭建和实验验证,证明了该方法的可行性和有效性,为工程实际应用提供了可靠的理论基础。
综上所述,基于卡尔曼滤波的永磁同步电机无传感器矢量控制方法在PMSM控制领域具有重要的研究意义和广阔的应用前景。该方法通过利用卡尔曼滤波算法实时估计转子位置和速度,实现了对永磁同步电机的无传感器矢量控制,提高了系统的性能和可靠性。同时,通过Matlab的仿真模型,验证了该方法的有效性,为工程实际应用提供了参考。
随着科学技术的不断发展,基于卡尔曼滤波的永磁同步电机无传感器矢量控制方法将在未来得到更广泛的应用。同时,也需要进一步研究和改进该方法,以提高其精确性和实时性。希望通过本文的介绍和分析,能够为相关研究人员提供一定的借鉴和启发,促进该领域的进一步发展。
相关的代码,程序地址如下:http://nodep.cn/667935045527.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









