






信捷XC系列标准程序,多段连续绝对定位控制,包含轴点动,回零,多段连续定位控制,整个项目结构清晰,注释完整,只要弄明白这个程序,就可以非常了解整个项目的程序如何去编写,从哪里开始下手,可提供程序问题解答,程序流程清晰明了
ID:3316667927505521
工控老司机
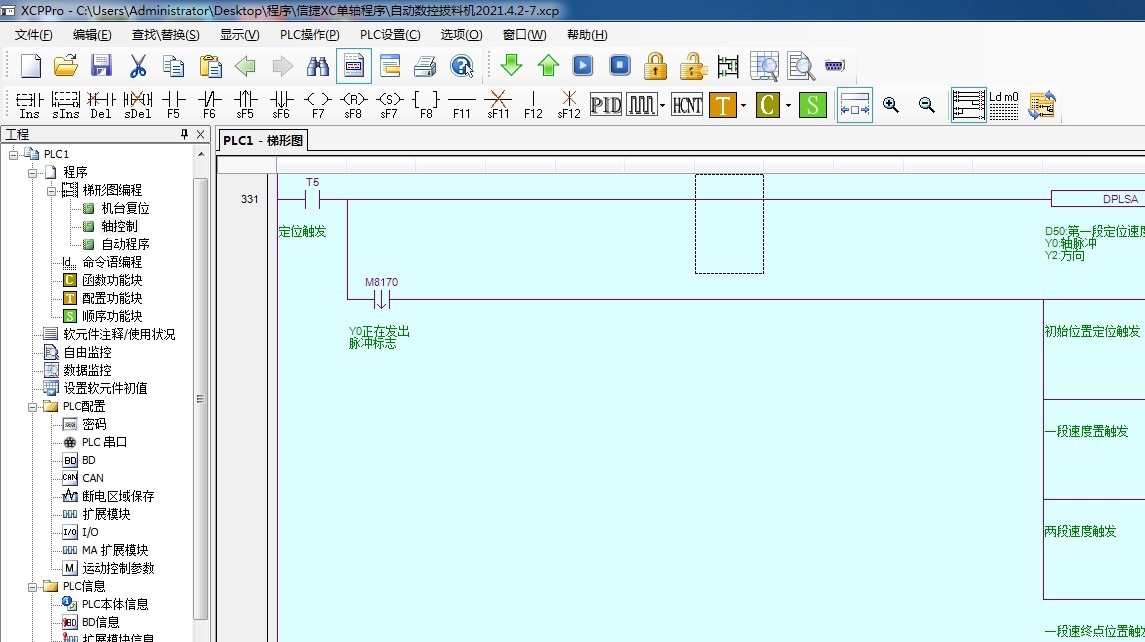
信捷XC系列标准程序是一种多段连续绝对定位控制的编程方式。它包含轴的点动、回零以及多段连续定位控制等功能,为工程师们提供了一个清晰结构、注释完整的程序样板。
在实际开发中,掌握了这个程序,就能全面了解整个项目的编程方式,并且知道从何处着手。本文将详细介绍信捷XC系列标准程序的功能特点、编程思路以及运行流程。
首先,我们来了解一下信捷XC系列标准程序的特点。
信捷XC系列标准程序基于多段连续绝对定位控制,可以实现高精度的运动控制。该程序结构清晰,注释完整,方便工程师们理解和修改代码。通过学习这个程序,工程师们可以更好地理解整个项目的编程逻辑,并且能够快速解决程序中的问题。
接下来,我们将详细介绍信捷XC系列标准程序的编程思路。
信捷XC系列标准程序的编程思路可以分为几个关键步骤。首先是轴的点动控制。通过编写程序,工程师们可以实现对轴的微小移动,从而实现对物体的精确定位。其次是回零控制。通过编制回零程序,可以在需要时将轴移动到初始位置,确保系统的准确性。最后是多段连续定位控制。通过编写程序,可以实现多个轴的同时运动控制,从而达到多轴协同工作的目的。
信捷XC系列标准程序的运行流程具有清晰明了的特点。
首先,程序启动后会初始化各个轴的控制参数,并完成回零操作,将轴移动到初始位置。然后,程序会按照预先设定的路径规划,完成多段连续定位控制。在每个定位过程中,程序会根据所需的位置精度和速度要求,调整轴的运动方式,以达到最佳的运动效果。最后,程序会完成所有运动过程后的收尾工作,包括关闭各个轴的控制信号,保证系统的安全性。
总结起来,信捷XC系列标准程序是一种多段连续绝对定位控制的编程方式,具有清晰的结构和完整的注释。通过学习这个程序,工程师们可以更好地理解整个项目的编程方式,并且可以快速解决程序中的问题。掌握了这个程序,工程师们可以更加轻松地编写出符合项目要求的高质量代码。
未来,我们期待信捷XC系列标准程序能够在更多的项目中得到广泛应用,并且为工程师们的开发工作提供更多的便利和支持。
相关的代码,程序地址如下:http://nodep.cn/667927505521.html
















 527
527











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









