







目录
在并发编程领域,有两大核心问题:一个是互斥,即同一时刻只允许一个线程访问共享资源;另一个是同步,即线程之间如何通信、协作。这两大问题,管程都是能够解决的。
Java SDK并发包通过Lock和Condition两个接口来实现管程,其中Lock用于解决互斥问题,Condition用于解决同步问题。
首先思考一下:Java语言本身提供的synchronized也是管程的一种实现,那为什么还要在SDK里提供另外一种实现呢?
1)再造管程(创造Lock)的理由
你也许曾经听到过很多这方面的传说,例如在Java的1.5版本中,synchronized性能不如SDK里面的Lock,但1.6版本之后,synchronized做了很多优化,将性能追了上来,所以1.6之后的版本又有人推荐使用synchronized了。那性能是否可以成为“重复造轮子”的理由呢?显然不能。因为性能问题优化一下就可以了,完全没必要“重复造轮子”。
我们前面在介绍死锁问题的时候,提出了一个破坏不可抢占条件方案,但是这个方案synchronized没有办法解决。原因是synchronized申请资源的时候,如果申请不到,线程直接进入阻塞状态了,而线程进入阻塞状态,啥都干不了,也释放不了线程已经占有的资源。但我们希望的是:
对于“不可抢占”这个条件,占用部分资源的线程进一步申请其他资源时,如果申请不到,可以主动释放它占有的资源,这样不可抢占这个条件就破坏掉了。
如果我们重新设计一把互斥锁去解决这个问题,那该怎么设计呢?我觉得有三种方案。
- 能够响应中断。synchronized的问题是,持有锁A后,如果尝试获取锁B失败,那么线程就进入阻塞状态,一旦发生死锁,就没有任何机会来唤醒阻塞的线程。但如果阻塞状态的线程能够响应中断信号,也就是说当我们给阻塞的线程发送中断信号的时候,能够唤醒它,那它就有机会释放曾经持有的锁A。这样就破坏了不可抢占条件了。
- 支持超时。如果线程在一段时间之内没有获取到锁,不是进入阻塞状态,而是返回一个错误,那这个线程也有机会释放曾经持有的锁。这样也能破坏不可抢占条件。
- 非阻塞地获取锁。如果尝试获取锁失败,并不进入阻塞状态,而是直接返回,那这个线程也有机会释放曾经持有的锁。这样也能破坏不可抢占条件。
这三种方案可以全面弥补synchronized的问题。到这里相信你应该也能理解了,这三个方案就是“重复造轮子”的主要原因,体现在API上,就是Lock接口的三个方法。详情如下:
// 支持中断的API
void lockInterruptibly() throws InterruptedException;
// 支持超时的API
boolean tryLock(long time, TimeUnit unit) throws InterruptedException;
// 支持非阻塞获取锁的API
boolean tryLock();
2)Lock相关属性
1.如何保证可见性
Java SDK里面锁的实现非常复杂,这里我就不展开细说了,但是原理还是需要简单介绍一下:它是利用了volatile相关的Happens-Before规则。Java SDK里面的ReentrantLock,内部持有一个volatile 的成员变量state,获取锁的时候,会读写state的值;解锁的时候,也会读写state的值(简化后的代码如下面所示)。

也就是说,在执行value+=1之前,程序先读写了一次volatile变量state,在执行value+=1之后,又读写了一次volatile变量state。根据相关的Happens-Before规则:
- 顺序性规则:对于线程T1,value+=1 Happens-Before 释放锁的操作unlock();
- volatile变量规则:由于state = 1会先读取state,所以线程T1的unlock()操作Happens-Before线程T2的lock()操作;
- 传递性规则:线程 T1的value+=1 Happens-Before 线程 T2 的 lock() 操作。
2.什么是可重入锁
如果你细心观察,会发现我们创建的锁的具体类名是ReentrantLock,这个翻译过来叫可重入锁,
所谓可重入锁,顾名思义,指的是线程可以重复获取同一把锁。
例如下面代码中,当线程T1执行到 ① 处时,已经获取到了锁 rtl ,当在 ① 处调用 get()方法时,会在 ② 再次对锁 rtl 执行加锁操作。此时,如果锁 rtl 是可重入的,那么线程T1可以再次加锁成功;如果锁 rtl 是不可重入的,那么线程T1此时会被阻塞。
除了可重入锁,可能你还听说过可重入函数,可重入函数怎么理解呢?指的是线程可以重复调用?显然不是,所谓可重入函数,指的是多个线程可以同时调用该函数,每个线程都能得到正确结果;同时在一个线程内支持线程切换,无论被切换多少次,结果都是正确的。多线程可以同时执行,还支持线程切换,这意味着什么呢?线程安全啊。所以,可重入函数是线程安全的。
class X {
private final Lock rtl = new ReentrantLock();
int value;
public int get() {
// 获取锁
rtl.lock(); ②
try {
return value;
} finally {
// 保证锁能释放
rtl.unlock();
}
}
public void addOne() {
// 获取锁
rtl.lock();
try {
value = 1 + get(); ①
} finally {
// 保证锁能释放
rtl.unlock();
}
}
}
3.公平锁与非公平锁
在使用ReentrantLock的时候,你会发现ReentrantLock这个类有两个构造函数,一个是无参构造函数,一个是传入fair参数的构造函数。fair参数代表的是锁的公平策略
如果传入true就表示需要构造一个公平锁,反之则表示要构造一个非公平锁。
//无参构造函数:默认非公平锁
public ReentrantLock() {
sync = new NonfairSync();
}
//根据公平策略参数创建锁
public ReentrantLock(boolean fair){
sync = fair ? new FairSync()
: new NonfairSync();
}
在前面我们介绍过入口等待队列,锁都对应着一个等待队列,如果一个线程没有获得锁,就会进入等待队列,当有线程释放锁的时候,就需要从等待队列中唤醒一个等待的线程。如果是公平锁,唤醒的策略就是谁等待的时间长,就唤醒谁,很公平;如果是非公平锁,则不提供这个公平保证,有可能等待时间短的线程反而先被唤醒。
4.用锁的最佳实践
你已经知道,用锁虽然能解决很多并发问题,但是风险也是挺高的。可能会导致死锁,也可能影响性能。这方面有是否有相关的最佳实践呢?有,还很多。但是我觉得最值得推荐的是并发大师Doug Lea《Java并发编程:设计原则与模式》一书中,推荐的三个用锁的最佳实践,它们分别是:
- 永远只在更新对象的成员变量时加锁
- 永远只在访问可变的成员变量时加锁
- 永远不在调用其他对象的方法时加锁
这三条规则,前两条估计你一定会认同,最后一条你可能会觉得过于严苛。但是我还是倾向于你去遵守,因为调用其他对象的方法,实在是太不安全了,也许“其他”方法里面有线程sleep()的调用,也可能会有奇慢无比的I/O操作,这些都会严重影响性能。更可怕的是,“其他”类的方法可能也会加锁,然后双重加锁就可能导致死锁。
除了并发大师Doug Lea推荐的三个最佳实践外,你也可以参考一些诸如:减少锁的持有时间、减小锁的粒度等业界广为人知的规则,其实本质上它们都是相通的,不过是在该加锁的地方加锁而已。
3)Lock&Condition支持多个条件变量
Java 语言内置的管程里只有一个条件变量,而Lock&Condition实现的管程是支持多个条件变量的,这是二者的一个重要区别。
在很多并发场景下,支持多个条件变量能够让我们的并发程序可读性更好,实现起来也更容易。例如,实现一个阻塞队列,就需要两个条件变量。
那如何利用两个条件变量快速实现阻塞队列呢?
一个阻塞队列,需要两个条件变量,一个是队列不空(空队列不允许出队),另一个是队列不满(队列已满不允许入队) 相关代码如下:
public class BlockedQueue{
final Lock lock = new ReentrantLock();
// 条件变量:队列不满
final Condition notFull = lock.newCondition();
// 条件变量:队列不空
final Condition notEmpty = lock.newCondition();
// 入队
void enq(T x) {
lock.lock();
try {
while (队列已满){
// 等待队列不满
notFull.await();
}
// 省略入队操作...
//入队后,通知可出队
notEmpty.signal();
}finally {
lock.unlock();
}
}
// 出队
void deq(){
lock.lock();
try {
while (队列已空){
// 等待队列不空
notEmpty.await();
}
// 省略出队操作...
//出队后,通知可入队
notFull.signal();
}finally {
lock.unlock();
}
}
}
不过,这里你需要注意,Lock和Condition实现的管程,线程等待和通知需要调用await()、signal()、signalAll(),它们的语义和wait()、notify()、notifyAll()是相同的。
但是不一样的是,Lock&Condition实现的管程里只能使用前面的await()、signal()、signalAll(),而后面的wait()、notify()、notifyAll()只有在synchronized实现的管程里才能使用。
4)同步与异步
通俗点来讲就是调用方是否需要等待结果:
- 如果需要等待结果,就是同步;
- 如果不需要等待结果,就是异步。
同步,是Java代码默认的处理方式。如果你想让你的程序支持异步,可以通过下面两种方式来实现:
- 调用方创建一个子线程,在子线程中执行方法调用,这种调用我们称为【异步调用】;
- 方法实现的时候,创建一个新的线程执行主要逻辑,主线程直接return,这种方法我们一般称为【异步方法】。
5)Reentrant源码分析

从类的继承图上可以看出,ReentrantLock实现了Lock接口。同时其具有3个内部类,分别为Sync,NonfairSync,FairSync。而Sync有继承了AbstractQueuedSynchronize,这个就是我们常说的AQS。而NonFairSync继承Sync也就是我们所说的非公平锁。FairSync继承Sync实现了公平锁功能。
5.1 Lock接口源码描述
/**
* @see ReentrantLock
* @see Condition
* @see ReadWriteLock
*
* @since 1.5
* @author Doug Lea
*/
public interface Lock {
//获取锁
void lock();
//获取可中断锁
void lockInterruptibly() throws InterruptedException;
//尝试获取锁,立刻返回
boolean tryLock();
//在指定的时间范围内尝试获取锁,立即返回
boolean tryLock(long time, TimeUnit unit) throws InterruptedException;
//释放当前锁
void unlock();
//获取一个条件对象,用于线程等待唤醒
Condition newCondition();
}
5.2 ReentrantLock的构造方法和成员
ReentranLock的构造方法成员参数如下:
public class ReentrantLock implements Lock, java.io.Serializable {
private static final long serialVersionUID = 7373984872572414699L;
// 同步器的引用
private final Sync sync;
//非公平锁的构造函数
public ReentrantLock() {
sync = new NonfairSync();
}
// 公平锁的构造函数
public ReentrantLock(boolean fair) {
// 三目运算符,如果为true 则为公平锁,反之为非公平锁
sync = fair ? new FairSync() : new NonfairSync();
}
}
5.3 Sync抽象类核心源码分析
// 静态的抽象内部类,修饰符为default,仅能在当前类所在的包中使用
// 继承了AbstractQueuedSynchronizer抽象类
abstract static class Sync extends AbstractQueuedSynchronizer {
private static final long serialVersionUID = -5179523762034025860L;
/**
* 抽象方法,获取当前锁,具体实现在子类中实现
*/
abstract void lock();
/**
* Performs non-fair tryLock. tryAcquire is implemented in
* subclasses, but both need nonfair try for trylock method.
* 非公平锁尝试的去获取锁,立刻返回
*/
final boolean nonfairTryAcquire(int acquires) {
// 获取当前线程
final Thread current = Thread.currentThread();
// 获取当前系统的同步状态变量state
int c = getState();
// 判断当前的系统状态变量是否为0
// 其中0,表示当前锁空闲。大于0表示当前系统锁已经被占用
if (c == 0) {
// 利用CAS原语设置当前state的状态值为1,立刻返回
if (compareAndSetState(0, acquires)) {
// 如果设置成功,表示已经获取当前锁,设置当前锁的拥有者为当前线程
setExclusiveOwnerThread(current);
// 返回获取成功
return true;
}
}
// 如果当前是state不为0,判断当前线程是否已经拥有锁
// 因为ReentrantLock是可冲入锁,所以如果当前线程已经拥有锁的情况下,可以再次使用该锁
else if (current == getExclusiveOwnerThread()) {
// 如果当前线程已经拥有锁,则把当前的 state + 1
int nextc = c + acquires;
if (nextc < 0) // overflow
throw new Error("Maximum lock count exceeded");
// 设置当前state的值
setState(nextc);
// 返回成功
return true;
}
return false;
}
// 释放当前锁资源
protected final boolean tryRelease(int releases) {
int c = getState() - releases;
if (Thread.currentThread() != getExclusiveOwnerThread())
throw new IllegalMonitorStateException();
boolean free = false;
if (c == 0) {
free = true;
setExclusiveOwnerThread(null);
}
setState(c);
return free;
}
// 判断当前线程是否拥有锁
protected final boolean isHeldExclusively() {
// While we must in general read state before owner,
// we don't need to do so to check if current thread is owner
return getExclusiveOwnerThread() == Thread.currentThread();
}
// 返回条件对象
final ConditionObject newCondition() {
return new ConditionObject();
}
// Methods relayed from outer class
// 获取当前拥有锁的线程
final Thread getOwner() {
return getState() == 0 ? null : getExclusiveOwnerThread();
}
// 获得当前线程持有的可重入锁的状态值
final int getHoldCount() {
return isHeldExclusively() ? getState() : 0;
}
// 是否获得锁
final boolean isLocked() {
return getState() != 0;
}
/**
* Reconstitutes the instance from a stream (that is, deserializes it).
*/
private void readObject(java.io.ObjectInputStream s)
throws java.io.IOException, ClassNotFoundException {
s.defaultReadObject();
setState(0); // reset to unlocked state
}
}
5.4 NonfairSync类核心源码分析
NonfairSync主要是非公平锁的实现:
static final class NonfairSync extends Sync {
private static final long serialVersionUID = 7316153563782823691L;
/**
* Performs lock. Try immediate barge, backing up to normal
* acquire on failure.
* 实现Sync的方法
*/
final void lock() {
// 尝试获取锁lock() 方法
if (compareAndSetState(0, 1))
setExclusiveOwnerThread(Thread.currentThread());
else
// 获取锁失败,加入到等待队列
acquire(1);
}
protected final boolean tryAcquire(int acquires) {
return nonfairTryAcquire(acquires);
}
}
5.5 FairSync类核心源码分析
以下是公平锁实现的核心源码
static final class FairSync extends Sync {
private static final long serialVersionUID = -3000897897090466540L;
// 公平锁没有尝试的去获取锁的功能,直接调用acquire()方法
final void lock() {
acquire(1);
}
/**
* Fair version of tryAcquire. Don't grant access unless
* recursive call or no waiters or is first.
*/
protected final boolean tryAcquire(int acquires) {
final Thread current = Thread.currentThread();
int c = getState();
// 公平锁中
if (c == 0) {
// 通过hasQueuedPredecessors判断当前线程是否为head的next节点。
// 如果是的话,则尝试获取锁
// 获取锁成功进行一系列的设置
if (!hasQueuedPredecessors() &&
compareAndSetState(0, acquires)) {
setExclusiveOwnerThread(current);
return true;
}
}
//可重入锁的设计思想
else if (current == getExclusiveOwnerThread()) {
int nextc = c + acquires;
if (nextc < 0)
throw new Error("Maximum lock count exceeded");
setState(nextc);
return true;
}
return false;
}
}
hasQueuedPredecessors源码分析:
public final boolean hasQueuedPredecessors() {
// The correctness of this depends on head being initialized
// before tail and on head.next being accurate if the current
// thread is first in queue.
Node t = tail; // Read fields in reverse initialization order
Node h = head;
Node s;
return h != t &&
((s = h.next) == null || s.thread != Thread.currentThread());
}
这里的逻辑判断稍微有些复杂,我们整理下思路。
return返回的代码,可以将逻辑判断分为2部分,只要其中有一个为true,则返回为true。当返回为真的话, if (!hasQueuedPredecessors() && compareAndSetState(0, acquires))就失败。我们详细分析下:
- h != t && ((s = h.next) == null
这个逻辑成立的一种可能是head指向头结点,tail此时还为null。考虑这种情况:当其他某个线程去获取锁失败,需构造一个结点加入同步队列中(假设此时同步队列为空),在添加的时候,需要先创建一个无意义傀儡头结点(在AQS的enq方法中,这是个自旋CAS操作),有可能在将head指向此傀儡结点完毕之后,还未将tail指向此结点。很明显,此线程时间上优于当前线程,所以,返回true,表示有等待中的线程且比自己来的还早。
- s.thread != Thread.currentThread()
当前的线程和Head的next线程是否相等。如果不相等返回为true。说明当前线程不是head的next节点,因为在公平锁中,只有head的next节点才有权利去获取锁
6)Dubbo源码分析
其实在编程领域,异步的场景还是挺多的,比如TCP协议本身就是异步的,我们工作中经常用到的RPC调用,在TCP协议层面,发送完RPC请求后,线程是不会等待RPC的响应结果的。可能你会觉得奇怪,平时工作中的RPC调用大多数都是同步的啊?这是怎么回事呢?
其实很简单,一定是有人帮你做了异步转同步的事情。例如目前知名的RPC框架Dubbo就给我们做了异步转同步的事情,那它是怎么做的呢?下面我们就来分析一下Dubbo的相关源码。
对于下面一个简单的RPC调用,默认情况下sayHello()方法,是个同步方法,也就是说,执行service.sayHello(“dubbo”)的时候,线程会停下来等结果。
DemoService service = 初始化部分省略
String message = service.sayHello("dubbo");
System.out.println(message);
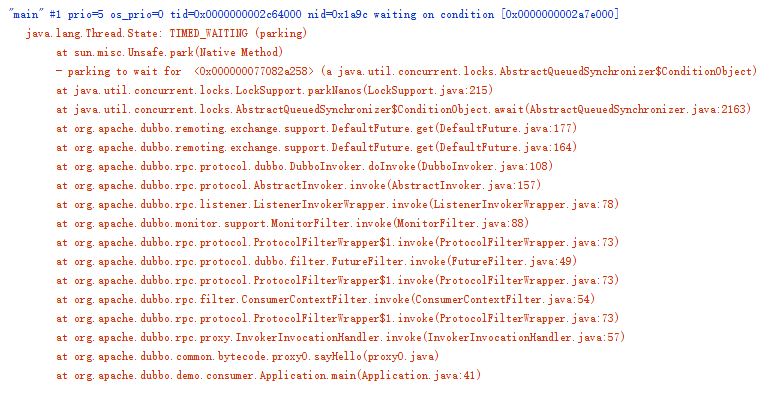
如果此时你将调用线程dump出来的话,会是下图这个样子,你会发现调用线程阻塞了,线程状态是TIMED_WAITING。本来发送请求是异步的,但是调用线程却阻塞了,说明Dubbo帮我们做了异步转同步的事情。通过调用栈,你能看到线程是阻塞在DefaultFuture.get()方法上,所以可以推断:Dubbo异步转同步的功能应该是通过DefaultFuture这个类实现的。
不过为了理清前后关系,还是有必要分析一下调用DefaultFuture.get()之前发生了什么。DubboInvoker的108行调用了DefaultFuture.get(),这一行很关键,我稍微修改了一下列在了下面。这一行先调用了request(inv, timeout)方法,这个方法其实就是发送RPC请求,之后通过调用get()方法等待RPC返回结果。
public class DubboInvoker{
Result doInvoke(Invocation inv){
// 下面这行就是源码中108行
// 为了便于展示,做了修改
return currentClient
.request(inv, timeout)
.get();
}
}
DefaultFuture这个类是很关键,我把相关的代码精简之后,列到了下面。不过在看代码之前,你还是有必要重复一下我们的需求:当RPC返回结果之前,阻塞调用线程,让调用线程等待;当RPC返回结果后,唤醒调用线程,让调用线程重新执行。不知道你有没有似曾相识的感觉,这不就是经典的等待-通知机制吗?这个时候想必你的脑海里应该能够浮现出管程的解决方案了。有了自己的方案之后,我们再来看看Dubbo是怎么实现的。
// 创建锁与条件变量
private final Lock lock = new ReentrantLock();
private final Condition done = lock.newCondition();
// 调用方通过该方法等待结果
Object get(int timeout){
long start = System.nanoTime();
lock.lock();
try {
while (!isDone()) {
done.await(timeout);
long cur=System.nanoTime();
if (isDone() ||
cur-start > timeout){
break;
}
}
} finally {
lock.unlock();
}
if (!isDone()) {
throw new TimeoutException();
}
return returnFromResponse();
}
// RPC结果是否已经返回
boolean isDone() {
return response != null;
}
// RPC结果返回时调用该方法
private void doReceived(Response res) {
lock.lock();
try {
response = res;
if (done != null) {
done.signal();
}
} finally {
lock.unlock();
}
}
调用线程通过调用get()方法等待RPC返回结果,这个方法里面,你看到的都是熟悉的“面孔”:调用lock()获取锁,在finally里面调用unlock()释放锁;获取锁后,通过经典的在循环中调用await()方法来实现等待。
当RPC结果返回时,会调用doReceived()方法,这个方法里面,调用lock()获取锁,在finally里面调用unlock()释放锁,获取锁后通过调用signal()来通知调用线程,结果已经返回,不用继续等待了。
至此,Dubbo里面的异步转同步的源码就分析完了,有没有觉得还挺简单的?最近这几年,工作中需要异步处理的越来越多了,其中有一个主要原因就是有些API本身就是异步API。例如websocket也是一个异步的通信协议,如果基于这个协议实现一个简单的RPC,你也会遇到异步转同步的问题。现在很多公有云的API本身也是异步的,例如创建云主机,就是一个异步的API,调用虽然成功了,但是云主机并没有创建成功,你需要调用另外一个API去轮询云主机的状态。如果你需要在项目内部封装创建云主机的API,你也会面临异步转同步的问题,因为同步的API更易用。















 6197
6197











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









