







前言
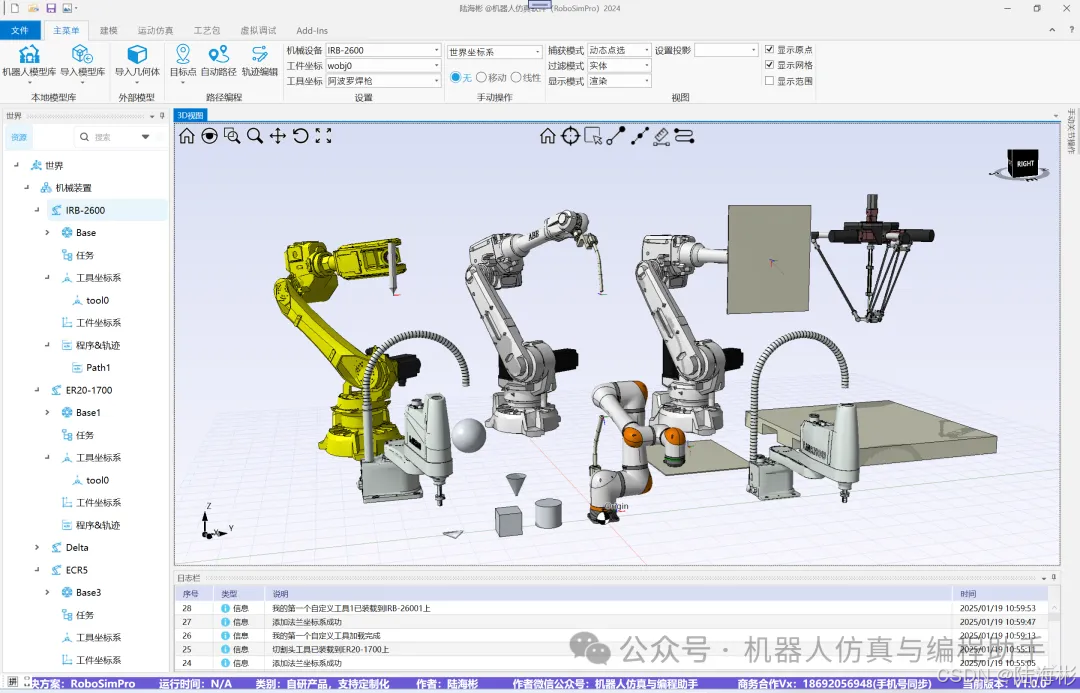
RoboSimPro是一款完全自主研发的机器人仿真软件,实现自主可控,涵盖从底层框架到核心算法的全流程解决方案。凭借多年的技术积累和行业深耕,RoboSimPro提供高效、精准、智能的仿真功能,支持多品牌机器人控制(如ABB、FANUC、KUKA、国产等)。其强大的3D场景构建、运动学算法和任务调度等功能,经过多年研发和优化 ,RoboSimPro能够为您提供高效、灵活的仿真平台,助力您在机器人研发和应用领域实现技术突破!
分享内容
本期,RoboSimPro以“碰撞检测可自定义任意类型物体”,如机器人、工具、几何模型为例,带您体验从模型导入到如何将任意类型物体设为碰撞检测对象“一站式!
💡RoboSimPro「全类型碰撞检测」功能,现已支持:
✅ 支持导入STEP/IGES等15+格式
✅ 自定义机器人/工具/异形件检测规则
✅ 动态仿真中实时预警
碰撞检测是机器人生产线虚拟仿真过程中必不可少的一个步骤,通过碰撞检测,可以在机器人运动过程中动态检测与之发生碰撞干涉的设备,这样就可以对设计方案提出修改与优化建议,做到提前预知、规避设计风险。
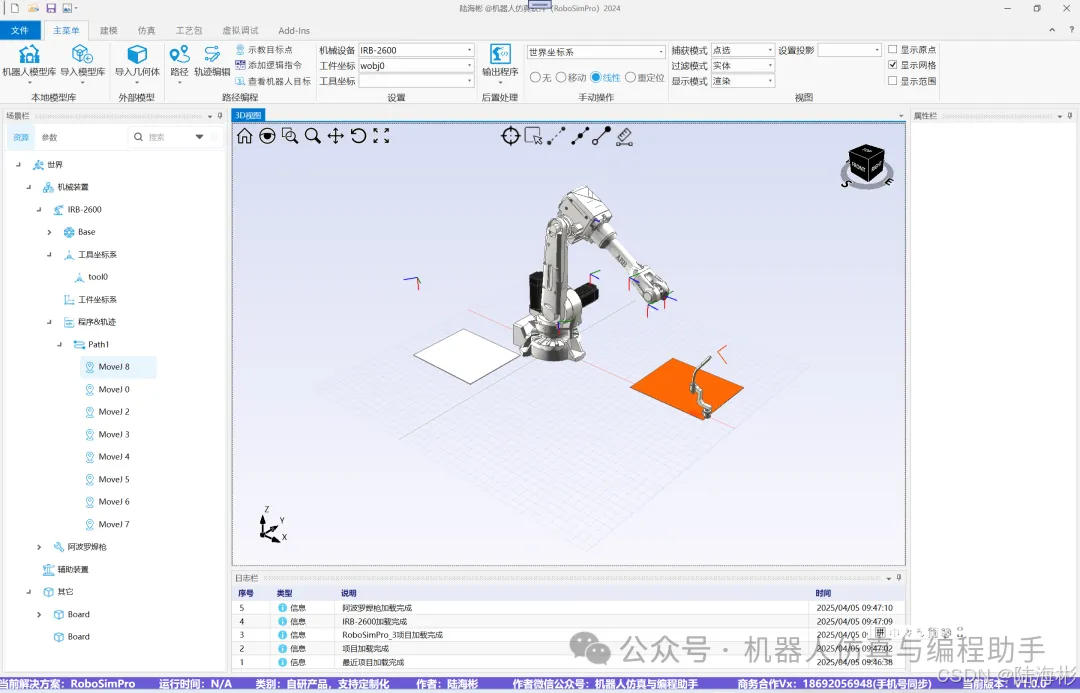
🚀【三步操作演示】
Step1⃣ 拖拽导入(支持多格式同场景)
Step2⃣ 框选检测对象(支持组合物体)
Step3⃣ 实时仿真(碰撞区域自动高亮+干涉量分析)
💥软件功能演示,请见下面链接:
RoboSimPro机器人仿真软件—碰撞检测支持自定义任意模型述


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









