







 本文主要分享了使用V4L2在Linux下进行摄像头图像采集时的一些重要细节,包括`v4l2_capability`结构体中`capabilities`字段的BIT0和BIT26的重要性,以及mmap在图像采集过程中的作用。通过mmap建立内核与用户空间的连接,实现高效的数据传输。同时,介绍了如何开始图像采集,以及在需要图像时如何从队列中获取和释放帧。附带了已测试成功的C++代码。
本文主要分享了使用V4L2在Linux下进行摄像头图像采集时的一些重要细节,包括`v4l2_capability`结构体中`capabilities`字段的BIT0和BIT26的重要性,以及mmap在图像采集过程中的作用。通过mmap建立内核与用户空间的连接,实现高效的数据传输。同时,介绍了如何开始图像采集,以及在需要图像时如何从队列中获取和释放帧。附带了已测试成功的C++代码。
最近打算做一个H.264的图像传输设备,第一步当然是采集图像,了解过相关知识后得知图像采集需要用到V4L2,于是在网上找关于V4L2的资料,昨天终于把V4L2看的差不多,并且把网上的程序封装成了符合我的习惯的一个C++类。关于V4L2采集图像在网上有很多博客讲的都很详细,而我也水平有限,就不写V4L2的详细采集过程了,现在分享几点学习V4L2采集图像时遇到的一些不容易懂或者易错的地方,相信对于初学者来说这些困惑点也会遇到。
首先放上一张V4L2采集图像的流程图,把这个图理解透了也就差不多了。
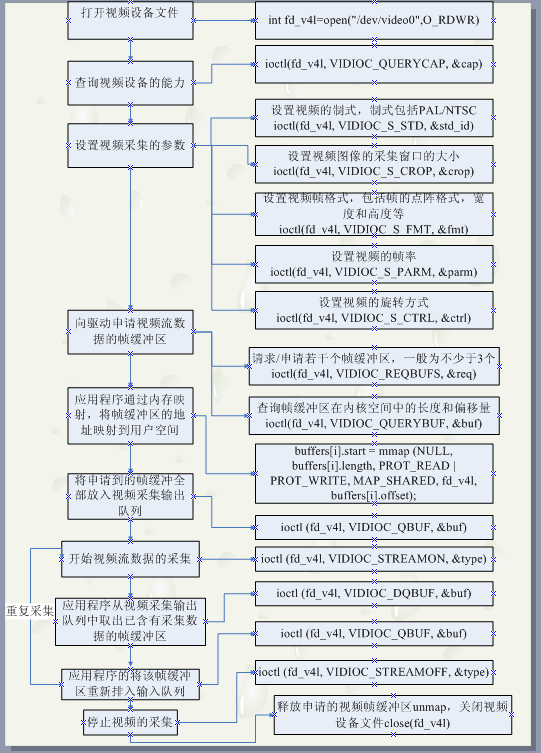
struct v4l2_capability里的capabilities的BIT0和BIT26很重要,这两个必须是1,否则是没法采集到图像的。可以使用这样的代码来验证一下:
//judge wherher or not to be a video-get device
if (!(cap.capabilities & V4L2_BUF_TYPE_VIDEO_CAPTURE))
{
printf("The Current device is not a video capture device\n");
exit(EXIT_FAILURE);
}
//judge whether or not to supply the form of video stream
if (!(cap.capabilities & V4L2_CAP_STREAMING))
{
printf("The Current device does not support streaming i/o\n");
exit(EXIT_FAILURE);
}第二点要说的就是mmap这一步,这一步会建立起内核与用户之间的联系,在打开设备的视频流后,只要第四步里申请到的队列不是满的,设备就会采集图像并送到队列中,而用户是不能访问内核的,所以我们需要mmap来建立起这个联系,我们才能得到图像数据。当然可以用read来读取,但是操作IO效率是很慢的。
for (n_buffer = 0; n_buffer < reqbufs.count; n_buffer++)
{
//stand for a frame
struct v4l2_buffer buf;
memset(&buf, 0, sizeof(buf));
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
buf.index = n_buffer;
//check the information of the kernel cache requested
if (-1 == xioctl(fd, VIDIOC_QUERYBUF, &buf))
{
perror("xioctl VIDIOC_QUERYBUF");
exit(EXIT_FAILURE);
}
usr_buf[n_buffer].length = buf.length;
usr_buf[n_buffer].start =
(char *)mmap(
NULL,
buf.length,
PROT_READ | PROT_WRITE,
MAP_PRIVATE,
fd,
buf.m.offset
);
if (MAP_FAILED == usr_buf[n_buffer].start)
{
perror("mmap");
exit(EXIT_FAILURE);
}
} 在开始采集图像这一步里,程序所做的工作有两点。
一是把申请到的帧缓存区送到视频采集队列,也就是第四步申请到的帧缓冲区
//place the kernel cache to a queue
for (i = 0; i < n_buffer; i++)
{
struct v4l2_buffer buf;
memset(&buf, 0, sizeof(buf));
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
buf.index = i;
if (-1 == xioctl(fd, VIDIOC_QBUF, &buf)){
perror("xioctl VIDIOC_QBUF");
exit(EXIT_FAILURE);
}
}二是打开视频流数据的采集,这个简单
enum v4l2_buf_type type;
//start capture data
type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
if (-1 == xioctl(fd, VIDIOC_STREAMON, &type))
{
printf("i=%d.\n", i);
perror("VIDIOC_STREAMON");
close(fd);
exit(EXIT_FAILURE);
}在我们需要得到图像的时候,首先要从队列中取出一帧,得到信息后再把这一帧放回队列中就行。
int CameraClass::GetOneImage(struct buffer_type *Image)
{
struct v4l2_buffer buf;
unsigned int i;
memset(&buf, 0, sizeof(buf));
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
//put cache from queue
if (-1 == xioctl(fd, VIDIOC_DQBUF, &buf))
{
perror("xioct VIDIOC_DQBUF");
exit 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1330
1330

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









