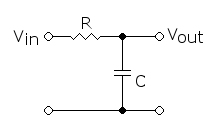
y(t)+RCdy(t)dt=x(t)
y
(
t
)
+
R
C
d
y
(
t
)
d
t
=
x
(
t
)
dy(t)dt=差分=y(k)−y(k−1)Δt
d
y
(
t
)
d
t
=
差
分
=
y
(
k
)
−
y
(
k
−
1
)
Δ
t
,代入得到差分形式:
y(k)=RCΔt+RCy(k−1)+ΔtΔt+RCx(k)
y
(
k
)
=
R
C
Δ
t
+
R
C
y
(
k
−
1
)
+
Δ
t
Δ
t
+
R
C
x
(
k
)
由近似公式:
11+Δt/RC=˙1−ΔtRC
1
1
+
Δ
t
/
R
C
=
˙
1
−
Δ
t
R
C
可得:
y(k)=(1−ΔtRC)y(k−1)+ΔtRCx(k)
y
(
k
)
=
(
1
−
Δ
t
R
C
)
y
(
k
−
1
)
+
Δ
t
R
C
x
(
k
)
即,一阶低通滤波的差分形式。
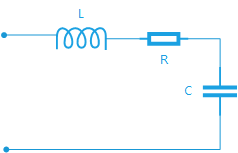
二阶低通滤波
过程略;
y(k)=2(1+σΔt)1+2σΔt+ω20Δt2y(k−1)−11+2σΔt+ω20Δt2y(k−2)+ω20Δt21+2σΔt+ω20Δt2x(k)
y
(
k
)
=
2
(
1
+
σ
Δ
t
)
1
+
2
σ
Δ
t
+
ω
0
2
Δ
t
2
y
(
k
−
1
)
−
1
1
+
2
σ
Δ
t
+
ω
0
2
Δ
t
2
y
(
k
−
2
)
+
ω
0
2
Δ
t
2
1
+
2
σ
Δ
t
+
ω
0
2
Δ
t
2
x
(
k
)

























 1518
1518

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









