






基于mpc控制的路径跟踪算法
可以自定义路径#MPC #LQR
#无人驾驶,carsim,MPC横向控制,PID速度控制,路径跟踪,自定义路径跟踪,自动变道,避撞变道。
模型预测,LPR。
# SIMULINK
# CARSIM
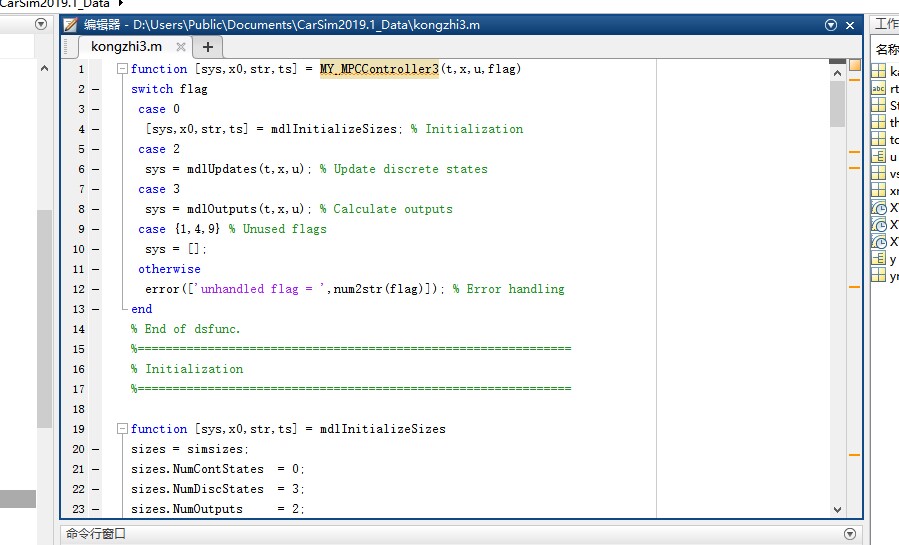
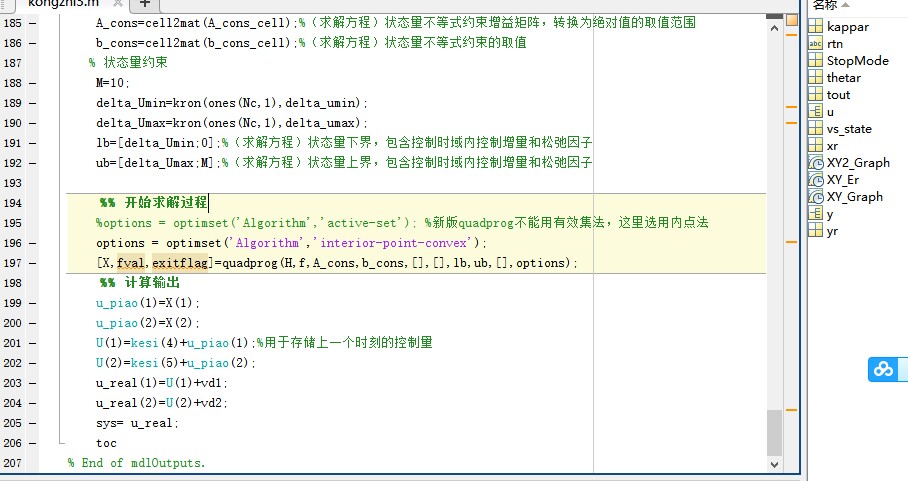
最下边是改良以后得mpc控制器代码。
ID:7950647178264318
智驾小崔cyj
基于MPC控制的路径跟踪算法
在无人驾驶领域,路径跟踪是一个关键的技术,它决定了车辆在实际道路上的行驶轨迹与预定路径的吻合度。传统的PID控制器虽然能够实现基本的速度控制,但在对车辆横向控制上,显得力不从心。为了更好地实现高级自动驾驶功能,我们引入了基于MPC(模型预测控制)的路径跟踪算法。
MPC是一种基于模型的控制方法,它将车辆的动力学模型与给定的路径进行结合,通过预测未来一段时间内的车辆轨迹,从而确定最优的控制策略。相比于传统的PID控制器,MPC能够更好地处理非线性系统、多变量系统以及约束条件,具有较强的鲁棒性和适应性。
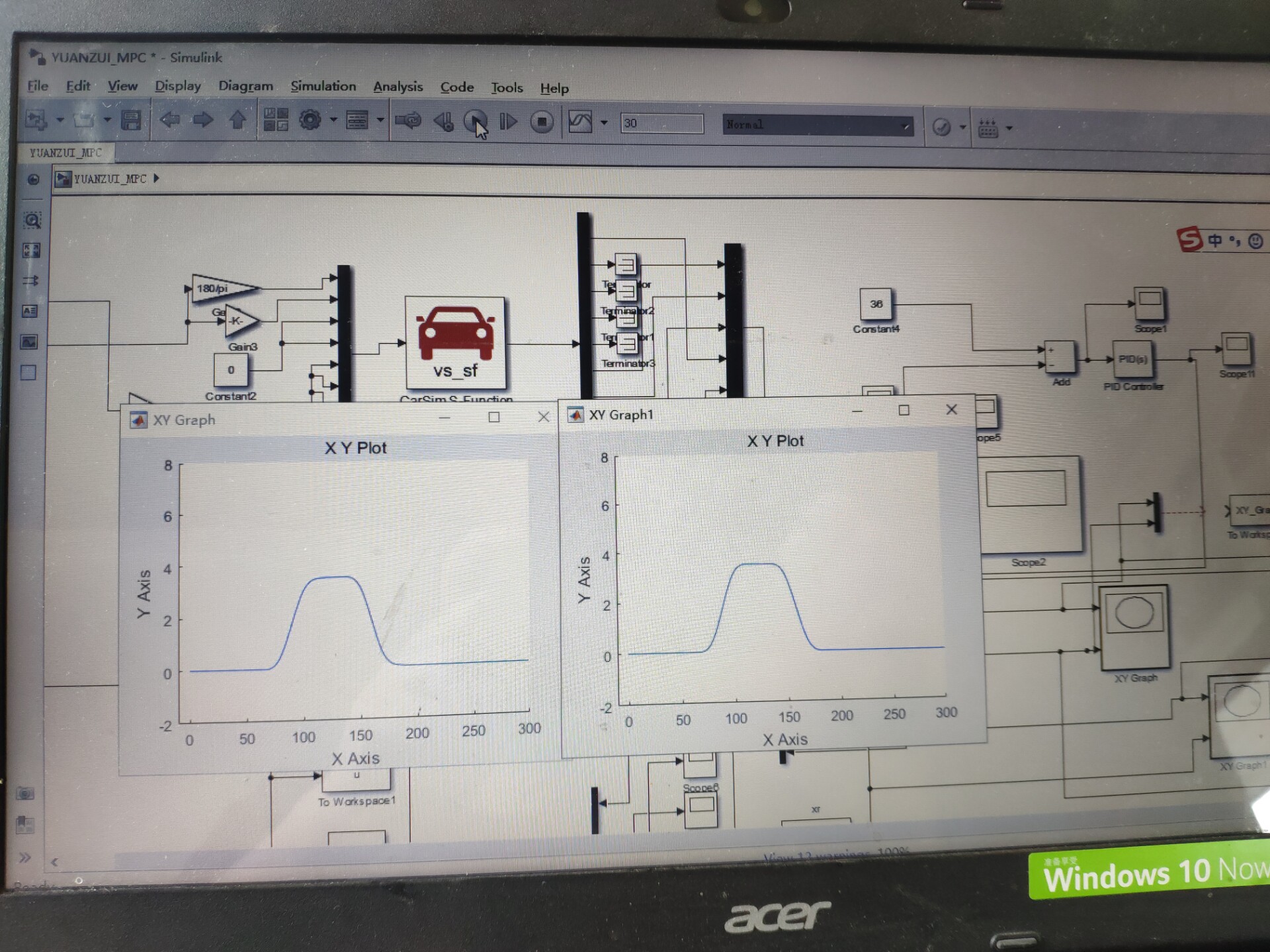
在MPC路径跟踪算法中,我们首先需要建立车辆的动力学模型。在本文中,我们选取了CARSIM作为仿真平台,并通过SIMULINK对其进行建模。通过对车辆的动力学进行建模,我们可以得到车辆的状态方程和输出方程,从而为后续的控制设计提供基础。
在路径跟踪中,我们可以根据具体需求自定义路径。通过在仿真环境中设定不同的路径,我们可以对MPC控制器进行测试和验证。此外,通过调整路径的参数,我们可以模拟出各种实际道路情况,从而更好地评估路径跟踪算法的性能。
路径跟踪算法中的核心是MPC控制器的设计。在控制器设计中,我们需要将路径信息纳入考虑,并根据车辆的状态和路径信息,通过求解优化问题来确定最优的控制策略。在本文中,我们采用了LQR(线性二次调节)控制器作为MPC控制器的基础。LQR控制器通过对系统状态的加权求平方和,从而得到系统的最优控制输入。
在实际应用中,为了更好地适应不同的道路情况和交通环境,我们进行了改良后的MPC控制器代码。该代码结合了路径跟踪算法和避撞变道功能。通过车辆的传感器和环境感知技术,我们可以及时发现前方障碍物,并自动进行变道操作,以确保车辆的安全行驶。
总结:
基于MPC控制的路径跟踪算法在无人驾驶领域具有广泛的应用前景。通过结合车辆动力学模型和给定路径信息,MPC控制器能够实现对车辆的精确控制,从而实现自动驾驶功能。通过在仿真平台上的实验验证,我们可以不断改进和优化路径跟踪算法,提高系统的稳定性和鲁棒性。在未来的研究中,我们还可以进一步探索模型预测控制的其他应用领域,并将其应用于实际的自动驾驶系统中。
相关的代码,程序地址如下:http://coupd.cn/647178264318.html
















 880
880











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









