






基于珊格地图的人工势场法 动态路径规划
路径规划算法 地图好修改
自己研究编写的Matlab路径规划
可自行设置起始点,目标点,自由更换地图。
———————————————————
可以和A*和RRT融合 动态障碍物
ID:69156647092119196
我的头发呢

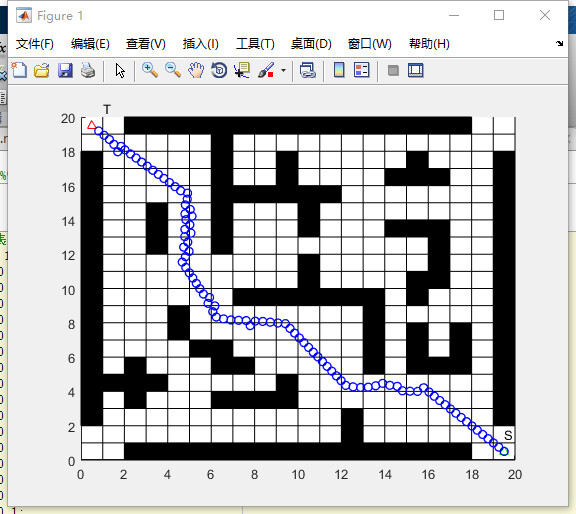
基于珊格地图的人工势场法是一种常用的动态路径规划算法。在路径规划过程中,地图的修改是一个常见的需求。本文将介绍一种基于珊格地图的人工势场法的动态路径规划算法,并同时融合了A*算法和RRT算法,以实现对动态障碍物的适应。
首先,我们需要了解什么是珊格地图。珊格地图是将连续的二维空间划分为一系列小格子的离散地图表示方法。每个小格子可以表示为一个节点,节点之间的连接关系可以表示为地图的拓扑结构。这种离散化的地图表示方法可以大大简化路径规划的计算复杂度,并且方便地进行地图的修改。
在基于珊格地图的人工势场法中,每个节点都有一个势能值,表示该节点的吸引力或者斥力。起始点和目标点被赋予吸引力,而障碍物节点被赋予斥力。通过计算每个节点的综合势能值,可以确定最优路径。在动态路径规划中,地图的修改是很常见的情况。珊格地图提供了一种便捷的方式来修改地图。我们可以根据实际需要,修改节点的势能值,以反映动态障碍物的变化。这样,路径规划算法可以及时地对地图的变化做出相应调整。
与传统的人工势场法不同,本文所介绍的算法中,我们同时融合了A算法和RRT算法。A算法是一种启发式搜索算法,可以高效地找到最短路径。而RRT算法是一种随机采样的路径规划算法,可以处理复杂的环境和动态障碍物。通过将A*算法和RRT算法与基于珊格地图的人工势场法相结合,我们可以更好地处理动态环境下的路径规划问题。
在实际应用中,我们可以使用Matlab编写自己的路径规划算法。通过编写代码,我们可以自行设置起始点和目标点,并进行自由更换地图。这样,我们可以根据实际情况进行路径规划测试,并且及时对地图进行修改。
总结来说,基于珊格地图的人工势场法是一种常用的路径规划算法。通过离散化的地图表示方法,我们可以方便地进行地图的修改,并且通过融合A*算法
相关的代码,程序地址如下:http://coupd.cn/647092119196.html
















 3260
3260











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









