







文章目录
1. Lucas Kanade光流法原理
1.1 Lucas Kanade光流定义
光流是空间运动目标在观察成像平面上像素运动的瞬时速度。在计算机视觉中,光流扮演着重要角色,在目标分割、识别、跟踪、机器人导航以及形状信息恢复等都有着非常重要的应用。
在 1981 1981 1981年, Bruce D. Lucas \text{Bruce D. Lucas} Bruce D. Lucas及 Takeo Kanade \text{Takeo Kanade} Takeo Kanade提出了 Lucas Kanade \text{Lucas Kanade} Lucas Kanade( LK \text{LK} LK)算法用于光流估计,在计算机视觉中被广泛的使用。
LK \text{LK} LK算法利用相邻两帧图像的差分来估计光流,该算法基于以下三个假设进行公式推导:
- 亮度恒定:场景中目标被跟踪的部分亮度保持不变。
- 时间持续性(微小移动):目标运动相对于帧率是缓慢、连贯的。这意味着时间的变化不会引起像素位置的剧烈变化,这样像素点的灰度值才能对位置求对应的偏导数。
- 空间一致性:相邻像素点具有相同的运动。
考察
t
t
t时刻,位于
(
x
,
y
)
(x,y)
(x,y)处的像素点,其灰度可写为:
I
(
x
,
y
,
t
)
I(x,y,t)
I(x,y,t)
我们假设
t
+
d
t
t+\text{d}t
t+dt时刻,该像素点运动到了
(
x
+
d
x
,
y
+
d
y
)
(x+\text{d}x,y+\text{d}y)
(x+dx,y+dy)处。由于亮度恒定的假设,我们有:
I
(
x
+
d
x
,
y
+
d
y
,
t
+
d
t
)
=
I
(
x
,
y
,
t
)
I(x+\text{d}x,y+\text{d}y,t+\text{d}t)=I(x,y,t)
I(x+dx,y+dy,t+dt)=I(x,y,t)
对左边进行泰勒展开,保留一阶项,可得:
I
(
x
+
d
x
,
y
+
d
y
,
t
+
d
t
)
≈
I
(
x
,
y
,
t
)
+
∂
I
∂
x
d
x
+
∂
I
∂
y
d
y
+
∂
I
∂
t
d
t
I(x+\text{d}x,y+\text{d}y,t+\text{d}t)\approx I(x,y,t)+\frac{\partial I}{\partial x}\text{d}x+\frac{\partial I}{\partial y}\text{d}y+\frac{\partial I}{\partial t}\text{d}t
I(x+dx,y+dy,t+dt)≈I(x,y,t)+∂x∂Idx+∂y∂Idy+∂t∂Idt
根据亮度恒定假设,我们有:
∂
I
∂
x
d
x
+
∂
I
∂
y
d
y
+
∂
I
∂
t
d
t
=
0
\frac{\partial I}{\partial x}\text{d}x+\frac{\partial I}{\partial y}\text{d}y+\frac{\partial I}{\partial t}\text{d}t=0
∂x∂Idx+∂y∂Idy+∂t∂Idt=0
两边除以
d
t
\text{d}t
dt,可得:
∂
I
∂
x
d
x
d
t
+
∂
I
∂
y
d
y
d
t
=
−
∂
I
∂
t
\frac{\partial I}{\partial x}\frac{\text{d}x}{\text{d}t}+\frac{\partial I}{\partial y}\frac{\text{d}y}{\text{d}t}=-\frac{\partial I}{\partial t}
∂x∂Idtdx+∂y∂Idtdy=−∂t∂I
其中
d
x
/
d
t
\text{d}x/\text{d}t
dx/dt为像素在
x
x
x轴上的运动速度,而
d
y
/
d
t
\text{d}y/\text{d}t
dy/dt为
y
y
y轴上的速度,把它们记为
u
u
u,
v
v
v。同时,
∂
I
/
∂
x
\partial I/\partial x
∂I/∂x为图像在该点处
x
x
x方向的梯度,另一项则是在
y
y
y方向的梯度,记为
I
x
I_{x}
Ix,
I
y
I_{y}
Iy。同理,把图像灰度对时间的偏导记为
I
t
I_{t}
It,写成矩阵形式,有:
[
I
x
I
y
]
[
u
v
]
=
−
I
t
\begin{bmatrix} I_{x}&I_{y} \end{bmatrix} \begin{bmatrix} u\\ v \end{bmatrix} =-I_{t}
[IxIy][uv]=−It
我们想计算的是像素的运动
u
u
u,
v
v
v,但是该式是带有两个变量的一次方程,仅凭它无法计算出
u
u
u,
v
v
v。因此,必须引入额外的约束来计算
u
u
u,
v
v
v。在
LK
\text{LK}
LK光流中,我们假设相邻像素点具有相同的运动。
考察一个大小为
(
2
w
+
1
)
×
(
2
w
+
1
)
(2w+1)\times (2w+1)
(2w+1)×(2w+1)的窗口,它含有
n
=
(
2
w
+
1
)
2
n=(2w+1)^2
n=(2w+1)2数量的像素点。该窗口内像素点具有同样的运动,因此我们共有
n
n
n个方程:
[
I
x
i
I
y
i
]
[
u
v
]
=
−
I
t
i
,
i
=
1
,
.
.
.
,
n
\begin{bmatrix} I_{xi}&I_{yi} \end{bmatrix} \begin{bmatrix} u\\ v \end{bmatrix} =-I_{ti},\ i=1,...,n
[IxiIyi][uv]=−Iti, i=1,...,n
令:
A
=
[
I
x
1
I
y
1
⋮
I
x
n
I
y
n
]
,
b
=
[
I
t
1
⋮
I
t
k
]
\boldsymbol{A}=\begin{bmatrix} I_{x1}&I_{y1}\\ \vdots\\ I_{xn}&I_{yn} \end{bmatrix},\ \boldsymbol{b}=\begin{bmatrix}I_{t1}\\\vdots\\I_{tk}\end{bmatrix}
A=
Ix1⋮IxnIy1Iyn
, b=
It1⋮Itk
于是有:
A
[
u
v
]
=
−
b
\boldsymbol{A}\begin{bmatrix}u\\v\end{bmatrix}=-\boldsymbol{b}
A[uv]=−b
这是一个关于
u
u
u,
v
v
v的超定线性方程,传统解法是求最小二乘解:
[
u
v
]
∗
=
−
(
A
T
A
)
−
1
A
T
b
\begin{bmatrix}u\\v\end{bmatrix}^*=-(\boldsymbol{A}^T\boldsymbol{A})^{-1}\boldsymbol{A}^T\boldsymbol{b}
[uv]∗=−(ATA)−1ATb
整理上式可得:
[
u
v
]
∗
=
[
∑
i
=
1
n
I
x
i
2
∑
i
=
1
n
I
x
i
I
y
i
∑
i
=
1
n
I
x
i
I
y
i
∑
i
=
1
n
I
y
i
2
]
−
1
[
−
∑
i
=
1
n
I
x
i
I
t
i
−
∑
i
=
1
n
I
y
i
I
t
i
]
\begin{bmatrix}u\\v\end{bmatrix}^*=\begin{bmatrix}\sum_{i=1}^nI^2_{xi}&\sum_{i=1}^nI_{xi}I_{yi}\\\sum_{i=1}^nI_{xi}I_{yi}&\sum_{i=1}^nI^2_{yi}\end{bmatrix}^{-1}\begin{bmatrix}-\sum_{i=1}^nI_{xi}I_{ti}\\-\sum_{i=1}^nI_{yi}I_{ti}\end{bmatrix}
[uv]∗=[∑i=1nIxi2∑i=1nIxiIyi∑i=1nIxiIyi∑i=1nIyi2]−1[−∑i=1nIxiIti−∑i=1nIyiIti]
最终求得的
u
u
u,
v
v
v就是
LK
\text{LK}
LK算法所对应的光流。
1.2 Lucas Kanade光流迭代求解
我们使用符号
I
I
I表示前一帧图像,符号
J
J
J表示后一帧图像。假设图像
I
I
I上的像素点
u
=
[
u
x
u
y
]
T
\boldsymbol{u}=\begin{bmatrix}u_x&u_y\end{bmatrix}^T
u=[uxuy]T经过
d
t
\text{d}t
dt的时间移动到了图像
J
J
J上的像素点
v
=
u
+
d
=
[
v
x
+
d
x
v
y
+
d
y
]
T
\boldsymbol{v}=\boldsymbol{u}+\boldsymbol{d}=\begin{bmatrix}v_x+d_x&v_y+d_y\end{bmatrix}^T
v=u+d=[vx+dxvy+dy]T处。位移
d
=
[
d
x
d
y
]
T
\boldsymbol{d}=\begin{bmatrix}d_x&d_y\end{bmatrix}^T
d=[dxdy]T即待求解的光流。我们在以
u
\boldsymbol{u}
u为中心的
(
2
w
+
1
)
×
(
2
w
+
1
)
(2w+1)\times(2w+1)
(2w+1)×(2w+1)图像区域内,通过最小化灰度匹配误差平方和的方式来确定
d
\boldsymbol{d}
d。因此,损失函数可写为:
ε
(
d
)
=
ε
(
d
x
,
d
y
)
=
∑
x
=
u
x
−
w
x
=
u
x
+
w
∑
y
=
u
y
−
w
y
=
u
y
+
w
(
I
(
x
,
y
)
−
J
(
x
+
d
x
,
y
+
d
y
)
)
2
\varepsilon(\boldsymbol{d})=\varepsilon(d_x,d_y)=\sum_{x=u_x-w}^{x=u_x+w}\sum_{y=u_y-w}^{y=u_y+w}\left(I(x,y)-J(x+d_x,y+d_y)\right)^2
ε(d)=ε(dx,dy)=x=ux−w∑x=ux+wy=uy−w∑y=uy+w(I(x,y)−J(x+dx,y+dy))2
关于光流
d
\boldsymbol{d}
d的求解,我们采用迭代方式来进行。假设上一轮迭代所求解的光流为
d
′
\boldsymbol{d}'
d′,残差为
Δ
d
=
d
−
d
′
\Delta\boldsymbol{d}=\boldsymbol{d}-\boldsymbol{d}'
Δd=d−d′,那么我们对损失函数求导有:
∂
ε
∂
d
=
−
2
∑
x
=
u
x
−
w
x
=
u
x
+
w
∑
y
=
u
y
−
w
y
=
u
y
+
w
(
I
(
x
,
y
)
−
J
(
x
+
d
x
′
+
Δ
d
x
,
y
+
d
y
′
+
Δ
d
y
)
)
[
J
x
J
y
]
\frac{\partial\varepsilon}{\partial\boldsymbol{d}}=-2\sum_{x=u_x-w}^{x=u_x+w}\sum_{y=u_y-w}^{y=u_y+w}\left(I(x,y)-J(x+d'_x+\Delta d_x,y+d'_y+\Delta d_y)\right)\begin{bmatrix}J_x\\J_y\end{bmatrix}
∂d∂ε=−2x=ux−w∑x=ux+wy=uy−w∑y=uy+w(I(x,y)−J(x+dx′+Δdx,y+dy′+Δdy))[JxJy]
其中 [ J x J y ] T \begin{bmatrix}J_x&J_y\end{bmatrix}^T [JxJy]T表示图像 J J J在像素点 ( x + d x , y + d y ) (x+d_x,y+d_y) (x+dx,y+dy)处的梯度,根据亮度恒定的假设,该梯度等于图像 I I I在像素点 ( x , y ) (x,y) (x,y)处的梯度,即 [ J x J y ] T = [ I x I y ] T \begin{bmatrix}J_x&J_y\end{bmatrix}^T=\begin{bmatrix}I_x&I_y\end{bmatrix}^T [JxJy]T=[IxIy]T。
将图像
J
J
J在像素点
(
x
+
d
x
′
,
y
+
d
y
′
)
(x+d'_x,y+d'_y)
(x+dx′,y+dy′)处进行泰勒展开,保留一阶项可得:
J
(
x
+
d
x
′
+
Δ
d
x
,
y
+
d
y
′
+
Δ
d
y
)
≈
J
(
x
+
d
x
′
,
y
+
d
y
′
)
+
[
Δ
d
x
Δ
d
y
]
[
J
x
J
y
]
J(x+d'_x+\Delta d_x,y+d'_y+\Delta d_y)\approx J(x+d'_x,y+d'_y)+\begin{bmatrix}\Delta d_x&\Delta d_y\end{bmatrix}\begin{bmatrix}J_x\\J_y\end{bmatrix}
J(x+dx′+Δdx,y+dy′+Δdy)≈J(x+dx′,y+dy′)+[ΔdxΔdy][JxJy]
其中 [ J x J y ] T \begin{bmatrix}J_x&J_y\end{bmatrix}^T [JxJy]T表示图像 J J J在像素点 ( x + d x ′ , y + d y ′ ) (x+d'_x,y+d'_y) (x+dx′,y+dy′)处的梯度,同理根据亮度恒定的假设,可以使用 [ I x I y ] T \begin{bmatrix}I_x&I_y\end{bmatrix}^T [IxIy]T近似 [ J x J y ] T \begin{bmatrix}J_x&J_y\end{bmatrix}^T [JxJy]T。
将上式带入损失函数导数可得:
∂
ε
∂
d
=
−
2
∑
x
=
u
x
−
w
x
=
u
x
+
w
∑
y
=
u
y
−
w
y
=
u
y
+
w
(
I
(
x
,
y
)
−
J
(
x
+
d
x
′
,
y
+
d
y
′
)
−
[
Δ
d
x
Δ
d
y
]
[
I
x
I
y
]
)
[
I
x
I
y
]
\frac{\partial\varepsilon}{\partial\boldsymbol{d}}=-2\sum_{x=u_x-w}^{x=u_x+w}\sum_{y=u_y-w}^{y=u_y+w}\left(I(x,y)-J(x+d'_x,y+d'_y)-\begin{bmatrix}\Delta d_x&\Delta d_y\end{bmatrix}\begin{bmatrix}I_x\\I_y\end{bmatrix}\right)\begin{bmatrix}I_x\\I_y\end{bmatrix}
∂d∂ε=−2x=ux−w∑x=ux+wy=uy−w∑y=uy+w(I(x,y)−J(x+dx′,y+dy′)−[ΔdxΔdy][IxIy])[IxIy]
令
δ
I
=
I
(
x
,
y
)
−
J
(
x
+
d
x
′
,
y
+
d
y
′
)
\delta I=I(x,y)-J(x+d'_x,y+d'_y)
δI=I(x,y)−J(x+dx′,y+dy′),整理上式有:
∂
ε
∂
d
=
−
2
∑
x
=
u
x
−
w
x
=
u
x
+
w
∑
y
=
u
y
−
w
y
=
u
y
+
w
(
[
I
x
2
I
x
I
y
I
x
I
y
I
y
2
]
Δ
d
−
[
δ
I
I
x
δ
I
I
y
]
)
\frac{\partial\varepsilon}{\partial\boldsymbol{d}}=-2\sum_{x=u_x-w}^{x=u_x+w}\sum_{y=u_y-w}^{y=u_y+w}\left(\begin{bmatrix}I^2_x&I_xI_y\\I_xI_y&I^2_y\end{bmatrix}\Delta\boldsymbol{d}-\begin{bmatrix}\delta II_x\\\delta II_y\end{bmatrix}\right)
∂d∂ε=−2x=ux−w∑x=ux+wy=uy−w∑y=uy+w([Ix2IxIyIxIyIy2]Δd−[δIIxδIIy])
取:
A
=
∑
x
=
u
x
−
w
x
=
u
x
+
w
∑
y
=
u
y
−
w
y
=
u
y
+
w
[
I
x
2
I
x
I
y
I
x
I
y
I
y
2
]
,
b
=
∑
x
=
u
x
−
w
x
=
u
x
+
w
∑
y
=
u
y
−
w
y
=
u
y
+
w
[
δ
I
I
x
δ
I
I
y
]
\boldsymbol{A}=\sum_{x=u_x-w}^{x=u_x+w}\sum_{y=u_y-w}^{y=u_y+w}\begin{bmatrix}I^2_x&I_xI_y\\I_xI_y&I^2_y\end{bmatrix},\boldsymbol{b}=\sum_{x=u_x-w}^{x=u_x+w}\sum_{y=u_y-w}^{y=u_y+w}\begin{bmatrix}\delta II_x\\\delta II_y\end{bmatrix}
A=x=ux−w∑x=ux+wy=uy−w∑y=uy+w[Ix2IxIyIxIyIy2],b=x=ux−w∑x=ux+wy=uy−w∑y=uy+w[δIIxδIIy]
由于损失函数在最优解
d
\boldsymbol{d}
d处导数为
0
\boldsymbol{0}
0,于是有:
A
Δ
d
−
b
=
0
\boldsymbol{A}\Delta\boldsymbol{d}-\boldsymbol{b}=\boldsymbol{0}
AΔd−b=0
那么残差可使用下式计算:
Δ
d
∗
=
A
−
1
b
\Delta\boldsymbol{d}^*=\boldsymbol{A}^{-1}\boldsymbol{b}
Δd∗=A−1b
根据计算出的残差,我们可以更新所求解的光流,并进行下一轮迭代。
2. 金字塔Lucas Kanade光流法原理
LK \text{LK} LK光流法假设目标仅微小移动,如果目标剧烈运动,假设就不成立,这会使得最终求出的光流值存在较大误差。为了缓解这种情况,我们可以在计算中缩小图像尺寸,从而缩小像素点移动,这样就可以使得 LK \text{LK} LK光流法应用于目标剧烈运动的场景。
Bouguet \text{Bouguet} Bouguet提出了一种利用图像金子塔对原图逐层分解,并至上而下修正光流的算法。
首先,需要对前后两帧图像建立高斯金字塔,最低分辨率图像在顶层(编号 L m L_m Lm),原图在底层(编号 0 0 0)。
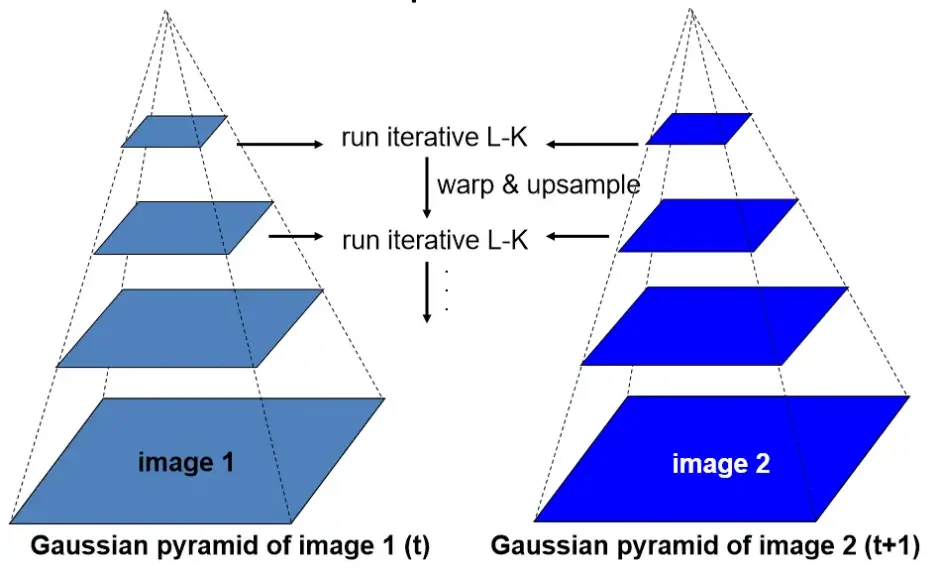
然后,我们使用迭代算法估计最顶层图像的光流:
g
L
m
+
d
L
m
\boldsymbol{g}^{L_m}+\boldsymbol{d}^{L_m}
gLm+dLm
其中
g
L
m
\boldsymbol{g}^{L_m}
gLm表示顶层光流估计的初值,默认为
0
\boldsymbol{0}
0,
d
L
m
\boldsymbol{d}^{L_m}
dLm表示顶层光流估计的残差,残差采用迭代的方式进行计算。
接着,我们将上层光流估计结果作为初值传递给下一层图像:
g
L
−
1
=
2
(
g
L
+
d
L
)
\boldsymbol{g}^{L-1}=2(\boldsymbol{g}^{L}+\boldsymbol{d}^{L})
gL−1=2(gL+dL)
最后,沿着金字塔至上而下,重复进行光流估计,直至到达金字塔底层:
d
=
g
0
+
d
0
\boldsymbol{d}=\boldsymbol{g}^{0}+\boldsymbol{d}^{0}
d=g0+d0
d
\boldsymbol{d}
d即由金字塔传递计算的最终光流。
通过这种搜索方式就可以剧烈运动目标的跟踪问题。
3. 金字塔光流算法代码解析
在 OpenCV \text{OpenCV} OpenCV中,使用函数 cv::calcOpticalFlowPyrLK \text{cv::calcOpticalFlowPyrLK} cv::calcOpticalFlowPyrLK实现金字塔光流计算以及特征追踪:
void cv::calcOpticalFlowPyrLK(
InputArray _prevImg, // _prevImg:前一帧图像(输入)
InputArray _nextImg, // _nextImg:后一帧图像(输入)
InputArray _prevPts, // _prevPts:前一帧特征点(输入)
InputOutputArray _nextPts, // _nextPts:后一帧特征点(输出)
OutputArray _status, // _status:状态矢量(输出)
// true:表示对应特征点存在有效光流,特征被追踪
// false:表示对应特征点不存在有效光流,特征未被追踪
OutputArray _err, // _err:误差矢量(输出),观察窗平均灰度匹配误差或最小特征根
Size winSize, // winSize:LK光流观察窗大小
int maxLevel, // maxLevel:金字塔最大高度
TermCriteria criteria, // TermCriteria criteria:迭代终止条件:达到最大迭代次数(COUNT)或达到最小迭代阈值(ESP)
// 默认最大迭代次数:30
// 默认最小迭代阈值:0.01
int flags, // flags:操作标志
// OPTFLOW_USE_INITIAL_FLOW:使用_nextPts作为光流
// OPTFLOW_LK_GET_MIN_EIGENVALS:使用最小特征值作为误差
double minEigThreshold // minEigThreshold:最小特征值阈值
)
在调用上述函数时,程序会调用 SparsePyrLKOpticalFlowImpl::calc \text{SparsePyrLKOpticalFlowImpl::calc} SparsePyrLKOpticalFlowImpl::calc建立图像金字塔并进行特征追踪:
void SparsePyrLKOpticalFlowImpl::calc( InputArray _prevImg, InputArray _nextImg,
InputArray _prevPts, InputOutputArray _nextPts,
OutputArray _status, OutputArray _err)
// _prevImg:前一帧图像(输入)
// _nextImg:后一帧图像(输入)
// _prevPts:前一帧特征点(输入)
// _nextPts:后一帧特征点(输出)
// _status:状态矢量(输出)
// _err:误差矢量(输出)
{
CV_INSTRUMENT_REGION();
CV_OCL_RUN(ocl::isOpenCLActivated() &&
(_prevImg.isUMat() || _nextImg.isUMat()) &&
ocl::Image2D::isFormatSupported(CV_32F, 1, false),
ocl_calcOpticalFlowPyrLK(_prevImg, _nextImg, _prevPts, _nextPts, _status, _err))
// OpenCL 加速
// Disabled due to bad accuracy
CV_OVX_RUN(false,
openvx_pyrlk(_prevImg, _nextImg, _prevPts, _nextPts, _status, _err))
// OpenVX 加速
Mat prevPtsMat = _prevPts.getMat();
const int derivDepth = DataType<cv::detail::deriv_type>::depth;
// 数据类型深度( typedef short deriv_type )
CV_Assert( maxLevel >= 0 && winSize.width > 2 && winSize.height > 2 );
// 参数检查
int level=0, i, npoints;
CV_Assert( (npoints = prevPtsMat.checkVector(2, CV_32F, true)) >= 0 );
// 检查 prevPtsMat 是否为 npoints x 2 的 float32 向量
/* 如果前一帧不存在特征点则返回 */
if( npoints == 0 )
{
_nextPts.release();
_status.release();
_err.release();
return;
}
if( !(flags & OPTFLOW_USE_INITIAL_FLOW) ) // 如果不使用初始估计
_nextPts.create(prevPtsMat.size(), prevPtsMat.type(), -1, true);
// _nextPts 设置为 npoints x 2 的 -1 矩阵
Mat nextPtsMat = _nextPts.getMat();
CV_Assert( nextPtsMat.checkVector(2, CV_32F, true) == npoints );
// 检查 nextPtsMat 是否为 npoints x 2 的 float32 向量
const Point2f* prevPts = prevPtsMat.ptr<Point2f>();
// 前一帧特征点指针
Point2f* nextPts = nextPtsMat.ptr<Point2f>();
// 后一帧特征点指针
_status.create((int)npoints, 1, CV_8U, -1, true);
// _status 设置为 npoints x 1 的 -1 矩阵
Mat statusMat = _status.getMat(), errMat;
CV_Assert( statusMat.isContinuous() ); // 检查 statusMat 是否连续存储
uchar* status = statusMat.ptr(); // 状态矢量指针
float* err = 0; // 误差矢量指针
/* 状态矢量整体初始化为true */
for( i = 0; i < npoints; i++ )
status[i] = true;
if( _err.needed() ) // 检查 _err 是否需要计算
{
_err.create((int)npoints, 1, CV_32F, -1, true);
// _err 设置为 npoints x 1 的 -1 矩阵
errMat = _err.getMat();
CV_Assert( errMat.isContinuous() ); // 检查 errMat 是否连续存储
err = errMat.ptr<float>(); // 误差矢量指针
}
std::vector<Mat> prevPyr, nextPyr;
int levels1 = -1; // 前一帧图像金字塔最高层数 - 1
int lvlStep1 = 1; // 前一帧图像金字塔层数步长(金字塔带差分图像:1,金字塔不带差分图像:2)
int levels2 = -1; // 后一帧图像金字塔最高层数 - 1
int lvlStep2 = 1; // 后一帧图像金字塔层数步长(金字塔带差分图像:1,金字塔不带差分图像:2)
if(_prevImg.kind() == _InputArray::STD_VECTOR_MAT)
// _prevImg 是否为图像金子塔
{
_prevImg.getMatVector(prevPyr);
levels1 = int(prevPyr.size()) - 1;
CV_Assert(levels1 >= 0);
if (levels1 % 2 == 1 && prevPyr[0].channels() * 2 == prevPyr[1].channels() && prevPyr[1].depth() == derivDepth)
{
lvlStep1 = 2;
levels1 /= 2;
}
// ensure that pyramid has required padding
if(levels1 > 0)
{
Size fullSize;
Point ofs;
prevPyr[lvlStep1].locateROI(fullSize, ofs);
CV_Assert(ofs.x >= winSize.width && ofs.y >= winSize.height
&& ofs.x + prevPyr[lvlStep1].cols + winSize.width <= fullSize.width
&& ofs.y + prevPyr[lvlStep1].rows + winSize.height <= fullSize.height);
}
if(levels1 < maxLevel)
maxLevel = levels1;
}
if(_nextImg.kind() == _InputArray::STD_VECTOR_MAT)
// _nextImg 是否为图像金子塔
{
_nextImg.getMatVector(nextPyr);
levels2 = int(nextPyr.size()) - 1;
CV_Assert(levels2 >= 0);
if (levels2 % 2 == 1 && nextPyr[0].channels() * 2 == nextPyr[1].channels() && nextPyr[1].depth() == derivDepth)
{
lvlStep2 = 2;
levels2 /= 2;
}
// ensure that pyramid has required padding
if(levels2 > 0)
{
Size fullSize;
Point ofs;
nextPyr[lvlStep2].locateROI(fullSize, ofs);
CV_Assert(ofs.x >= winSize.width && ofs.y >= winSize.height
&& ofs.x + nextPyr[lvlStep2].cols + winSize.width <= fullSize.width
&& ofs.y + nextPyr[lvlStep2].rows + winSize.height <= fullSize.height);
}
if(levels2 < maxLevel)
maxLevel = levels2;
}
if (levels1 < 0)
maxLevel = buildOpticalFlowPyramid(_prevImg, prevPyr, winSize, maxLevel, false);
// 构建前一帧图像金字塔
if (levels2 < 0)
maxLevel = buildOpticalFlowPyramid(_nextImg, nextPyr, winSize, maxLevel, false);
// 构建后一帧图像金字塔
/* 调整迭代终止条件 */
if( (criteria.type & TermCriteria::COUNT) == 0 )
criteria.maxCount = 30;
else
criteria.maxCount = std::min(std::max(criteria.maxCount, 0), 100);
if( (criteria.type & TermCriteria::EPS) == 0 )
criteria.epsilon = 0.01;
else
criteria.epsilon = std::min(std::max(criteria.epsilon, 0.), 10.);
criteria.epsilon *= criteria.epsilon;
// dI/dx ~ Ix, dI/dy ~ Iy
/* 如果金字塔不带差分图像,则创建缓冲区用于计算差分图像 */
Mat derivIBuf;
if(lvlStep1 == 1)
derivIBuf.create(prevPyr[0].rows + winSize.height*2, prevPyr[0].cols + winSize.width*2, CV_MAKETYPE(derivDepth, prevPyr[0].channels() * 2));
/* 遍历金字塔各层 */
for( level = maxLevel; level >= 0; level-- )
{
/* 如果金字塔不带差分图像,则计算差分图像,否则使用金字塔差分图像 */
Mat derivI;
if(lvlStep1 == 1)
{
Size imgSize = prevPyr[level * lvlStep1].size();
Mat _derivI( imgSize.height + winSize.height*2,
imgSize.width + winSize.width*2, derivIBuf.type(), derivIBuf.ptr() );
derivI = _derivI(Rect(winSize.width, winSize.height, imgSize.width, imgSize.height));
calcScharrDeriv(prevPyr[level * lvlStep1], derivI);
copyMakeBorder(derivI, _derivI, winSize.height, winSize.height, winSize.width, winSize.width, BORDER_CONSTANT|BORDER_ISOLATED);
}
else
derivI = prevPyr[level * lvlStep1 + 1];
CV_Assert(prevPyr[level * lvlStep1].size() == nextPyr[level * lvlStep2].size());
CV_Assert(prevPyr[level * lvlStep1].type() == nextPyr[level * lvlStep2].type());
typedef cv::detail::LKTrackerInvoker LKTrackerInvoker;
parallel_for_(Range(0, npoints), LKTrackerInvoker(prevPyr[level * lvlStep1], derivI, nextPyr[level * lvlStep2], prevPts, nextPts, status, err, winSize, criteria, level, maxLevel, flags, (float)minEigThreshold));
// 多线程调用LKTrackerInvoker计算特征点光流,进行特征追踪
}
}
关于图像金字塔建立的相关代码如下:
int cv::buildOpticalFlowPyramid(InputArray _img, OutputArrayOfArrays pyramid, Size winSize, int maxLevel, bool withDerivatives,
int pyrBorder, int derivBorder, bool tryReuseInputImage)
// _img:输入图像
// pyramid:输出金字塔
// winSize:LK光流观察窗大小,这里用于边界处理
// maxLevel:最大金字塔高度
// withDerivatives:是否构建差分金字塔
// pyrBorder:图像金字塔边界处理方法
// derivBorder:差分金字塔边界处理方法
// tryReuseInputImage:是否复用输入图像
{
CV_INSTRUMENT_REGION();
Mat img = _img.getMat();
CV_Assert(img.depth() == CV_8U && winSize.width > 2 && winSize.height > 2 );
// 参数检查
int pyrstep = withDerivatives ? 2 : 1; // 如果需要构建差分金字塔,那么图像金字塔各层在整体金字塔中的步长为 2(图像与差分依次排列),否则步长为 1
pyramid.create(1, (maxLevel + 1) * pyrstep, 0 /*type*/, -1, true);
// 构建 maxLevel + 1 层金字塔,类型为 CV_8UC1,
int derivType = CV_MAKETYPE(DataType<cv::detail::deriv_type>::depth, img.channels() * 2);
// 差分矩阵类型
//level 0
bool lvl0IsSet = false; // level 0 set 标志置 false
if(tryReuseInputImage && img.isSubmatrix() && (pyrBorder & BORDER_ISOLATED) == 0)
// 如果复用 img 且 img 为子矩阵且???
{
Size wholeSize;
Point ofs;
img.locateROI(wholeSize, ofs); // 定位 img 在父矩阵中的位置
if (ofs.x >= winSize.width && ofs.y >= winSize.height
&& ofs.x + img.cols + winSize.width <= wholeSize.width
&& ofs.y + img.rows + winSize.height <= wholeSize.height)
// 判断 img 是否距父矩阵边界距离大于等于 1 个 winSize 的尺寸
{
pyramid.getMatRef(0) = img; // 将金字塔第 0 层设置为 img 矩阵
lvl0IsSet = true; // level 0 set 标志置 true
}
}
if(!lvl0IsSet) // 如果金字塔第 0 层未设置
{
Mat& temp = pyramid.getMatRef(0); // 金字塔第 0 层
if(!temp.empty()) // 如果金字塔第 0 层非空
temp.adjustROI(winSize.height, winSize.height, winSize.width, winSize.width);
// 调整子矩阵位置以及大小,使其距父矩阵边界距离等于 1 个 winSize 的尺寸
if(temp.type() != img.type() || temp.cols != winSize.width*2 + img.cols || temp.rows != winSize.height * 2 + img.rows)
// 如果金字塔第 0 层矩阵类型与 img 矩阵类型不一致或金字塔第 0 层尺寸不等于 img 加 winSize 边界的尺寸
temp.create(img.rows + winSize.height*2, img.cols + winSize.width*2, img.type());
// 构建 (img.rows + winSize.height * 2) x (img.cols + winSize.width * 2) 大小矩阵,矩阵类型与 img 矩阵类型一致
if(pyrBorder == BORDER_TRANSPARENT) // 如果图像金字塔边界采用透明填充
img.copyTo(temp(Rect(winSize.width, winSize.height, img.cols, img.rows)));
// 将 img 拷贝至金字塔第 0 层距离左上角 (winSize.width, winSize.height) 的位置
else
copyMakeBorder(img, temp, winSize.height, winSize.height, winSize.width, winSize.width, pyrBorder);
// 将 img 拷贝至金字塔第 0 层并按 pyrBorder 要求生成 winSize 尺寸的边界
temp.adjustROI(-winSize.height, -winSize.height, -winSize.width, -winSize.width);
// ???
}
Size sz = img.size();
Mat prevLevel = pyramid.getMatRef(0);
Mat thisLevel = prevLevel;
for(int level = 0; level <= maxLevel; ++level)
{
if (level != 0)
{
Mat& temp = pyramid.getMatRef(level * pyrstep);
// 金字塔第 level 层(图像)
if(!temp.empty()) // 如果金字塔第 level 层非空
temp.adjustROI(winSize.height, winSize.height, winSize.width, winSize.width);
// 调整子矩阵位置以及大小,使其距父矩阵边界距离等于 1 个 winSize 的尺寸
if(temp.type() != img.type() || temp.cols != winSize.width*2 + sz.width || temp.rows != winSize.height * 2 + sz.height)
// 如果金字塔第 level 层矩阵类型与 img 矩阵类型不一致或金字塔第 level 层尺寸不等于 sz 加 winSize 边界的尺寸
temp.create(sz.height + winSize.height*2, sz.width + winSize.width*2, img.type());
// 构建 (sz.rows + winSize.height * 2) x (sz.cols + winSize.width * 2) 大小矩阵,矩阵类型与 img 矩阵类型一致
thisLevel = temp(Rect(winSize.width, winSize.height, sz.width, sz.height));
// 从金字塔第 level 层距离左上角 (winSize.width, winSize.height) 的位置提取 sz 尺寸的 thisLevel
pyrDown(prevLevel, thisLevel, sz); // 根据 prevLevel 内容对其进行下采样生成 sz 尺寸的 thisLevel
// 采用 5 x 5 高斯模板对图像进行滤波后再抽样降低分辨率,模板被分解为水平算子和竖直算子,采用的系数为:(1, 4, 6, 4, 1)
if(pyrBorder != BORDER_TRANSPARENT) // 如果图像金字塔边界不采用透明填充
copyMakeBorder(thisLevel, temp, winSize.height, winSize.height, winSize.width, winSize.width, pyrBorder|BORDER_ISOLATED);
// 将 thisLevel 拷贝至金字塔第 level 层并按 pyrBorder 要求生成 winSize 尺寸的边界
temp.adjustROI(-winSize.height, -winSize.height, -winSize.width, -winSize.width);
// ???
}
if(withDerivatives)
{
Mat& deriv = pyramid.getMatRef(level * pyrstep + 1);
// 金字塔第 level 层(差分)
if(!deriv.empty()) // 如果金字塔第 level 层非空
deriv.adjustROI(winSize.height, winSize.height, winSize.width, winSize.width);
// 调整子矩阵位置以及大小,使其距父矩阵边界距离等于 1 个 winSize 的尺寸
if(deriv.type() != derivType || deriv.cols != winSize.width*2 + sz.width || deriv.rows != winSize.height * 2 + sz.height)
// 如果金字塔第 level 层矩阵类型非 derivType 或金字塔第 level 层尺寸不等于 sz 加 winSize 边界的尺寸
deriv.create(sz.height + winSize.height*2, sz.width + winSize.width*2, derivType);
// 构建 (sz.rows + winSize.height * 2) x (sz.cols + winSize.width * 2) 大小矩阵,矩阵类型为 derivType
Mat derivI = deriv(Rect(winSize.width, winSize.height, sz.width, sz.height));
// 从金字塔第 level 层距离左上角 (winSize.width, winSize.height) 的位置提取 sz 尺寸的 thisLevel
calcScharrDeriv(thisLevel, derivI); // 利用 Scharr 算子计算 thisLevel 梯度 derivI
// Scharr 算子被分解为平滑算子:(3, 10, 3),以及差分算子:(-1,0,1)分别对图像进行卷积
if(derivBorder != BORDER_TRANSPARENT)
// 如果图像金字塔边界不采用透明填充
copyMakeBorder(derivI, deriv, winSize.height, winSize.height, winSize.width, winSize.width, derivBorder|BORDER_ISOLATED);
// 将 derivI 拷贝至金字塔第 level 层并按 derivBorder 要求生成 winSize 尺寸的边界
deriv.adjustROI(-winSize.height, -winSize.height, -winSize.width, -winSize.width);
// ???
}
sz = Size((sz.width+1)/2, (sz.height+1)/2);
// 将分辨率逐步降低
if( sz.width <= winSize.width || sz.height <= winSize.height )
// 如果分辨率小于 sz 尺寸
{
pyramid.create(1, (level + 1) * pyrstep, 0 /*type*/, -1, true);//check this
// 调整金字塔层数并
return level;
}
prevLevel = thisLevel; // 将 thisLevel 赋值给 prevLevel 并进行下一轮迭代
}
return maxLevel;
}
关于光流计算以及特征追踪的相关代码如下:
void cv::detail::LKTrackerInvoker::operator()(const Range& range) const
// range:(0, npoints)
{
CV_INSTRUMENT_REGION();
Point2f halfWin((winSize.width-1)*0.5f, (winSize.height-1)*0.5f);
const Mat& I = *prevImg;
const Mat& J = *nextImg;
const Mat& derivI = *prevDeriv;
int j, cn = I.channels(), cn2 = cn*2;
cv::AutoBuffer<deriv_type> _buf(winSize.area()*(cn + cn2));
int derivDepth = DataType<deriv_type>::depth;
Mat IWinBuf(winSize, CV_MAKETYPE(derivDepth, cn), _buf.data());
Mat derivIWinBuf(winSize, CV_MAKETYPE(derivDepth, cn2), _buf.data() + winSize.area()*cn);
for( int ptidx = range.start; ptidx < range.end; ptidx++ )
{
Point2f prevPt = prevPts[ptidx]*(float)(1./(1 << level));
// 对前一帧特征点 x,y 坐标进行缩放以适配当前层分辨率
Point2f nextPt;
if( level == maxLevel ) // 如果当前层是金字塔最后一层(对金字塔各层的遍历由最后一层开始)
{
if( flags & OPTFLOW_USE_INITIAL_FLOW )
// 如果对后一帧特征点使用了初始化值
nextPt = nextPts[ptidx]*(float)(1./(1 << level));
// 对后一帧特征点 x,y 坐标进行缩放以适配当前层分辨率
else
nextPt = prevPt; // 使用前一帧特征点初始化后一帧特征点
}
else
nextPt = nextPts[ptidx]*2.f; // 对后一帧特征点 x,y 坐标进行缩放以适配当前层分辨率
nextPts[ptidx] = nextPt; // 将处理后的结果放回 nextPts
Point2i iprevPt, inextPt;
prevPt -= halfWin; // 对前一帧特征点 x,y 坐标进行调整使其指向观察窗左上角顶点
iprevPt.x = cvFloor(prevPt.x);
iprevPt.y = cvFloor(prevPt.y);
if( iprevPt.x < -winSize.width || iprevPt.x >= derivI.cols ||
iprevPt.y < -winSize.height || iprevPt.y >= derivI.rows )
// 如果特征点观察窗偏离当前图像
{
if( level == 0 )
{
if( status )
status[ptidx] = false; // 特征点状态值赋 false
if( err )
err[ptidx] = 0; // 特征点误差值赋 0
}
continue;
}
float a = prevPt.x - iprevPt.x;
float b = prevPt.y - iprevPt.y;
const int W_BITS = 14, W_BITS1 = 14;
const float FLT_SCALE = 1.f/(1 << 20);
int iw00 = cvRound((1.f - a)*(1.f - b)*(1 << W_BITS));
int iw01 = cvRound(a*(1.f - b)*(1 << W_BITS));
int iw10 = cvRound((1.f - a)*b*(1 << W_BITS));
int iw11 = (1 << W_BITS) - iw00 - iw01 - iw10;
int dstep = (int)(derivI.step/derivI.elemSize1());
int stepI = (int)(I.step/I.elemSize1());
int stepJ = (int)(J.step/J.elemSize1());
acctype iA11 = 0, iA12 = 0, iA22 = 0;
float A11, A12, A22;
#if CV_SIMD128 && !CV_NEON
v_int16x8 qw0((short)(iw00), (short)(iw01), (short)(iw00), (short)(iw01), (short)(iw00), (short)(iw01), (short)(iw00), (short)(iw01));
v_int16x8 qw1((short)(iw10), (short)(iw11), (short)(iw10), (short)(iw11), (short)(iw10), (short)(iw11), (short)(iw10), (short)(iw11));
v_int32x4 qdelta_d = v_setall_s32(1 << (W_BITS1-1));
v_int32x4 qdelta = v_setall_s32(1 << (W_BITS1-5-1));
v_float32x4 qA11 = v_setzero_f32(), qA12 = v_setzero_f32(), qA22 = v_setzero_f32();
#endif
#if CV_NEON
float CV_DECL_ALIGNED(16) nA11[] = { 0, 0, 0, 0 }, nA12[] = { 0, 0, 0, 0 }, nA22[] = { 0, 0, 0, 0 };
const int shifter1 = -(W_BITS - 5); //negative so it shifts right
const int shifter2 = -(W_BITS);
const int16x4_t d26 = vdup_n_s16((int16_t)iw00);
const int16x4_t d27 = vdup_n_s16((int16_t)iw01);
const int16x4_t d28 = vdup_n_s16((int16_t)iw10);
const int16x4_t d29 = vdup_n_s16((int16_t)iw11);
const int32x4_t q11 = vdupq_n_s32((int32_t)shifter1);
const int32x4_t q12 = vdupq_n_s32((int32_t)shifter2);
#endif
// extract the patch from the first image, compute covariation matrix of derivatives
int x, y;
for( y = 0; y < winSize.height; y++ )
{
const uchar* src = I.ptr() + (y + iprevPt.y)*stepI + iprevPt.x*cn;
// 前一帧图像观察窗首地址
const deriv_type* dsrc = derivI.ptr<deriv_type>() + (y + iprevPt.y)*dstep + iprevPt.x*cn2;
// 前一帧差分图像观察窗首地址
deriv_type* Iptr = IWinBuf.ptr<deriv_type>(y);
deriv_type* dIptr = derivIWinBuf.ptr<deriv_type>(y);
x = 0;
#if CV_SIMD128 && !CV_NEON
for( ; x <= winSize.width*cn - 8; x += 8, dsrc += 8*2, dIptr += 8*2 )
{
v_int32x4 t0, t1;
v_int16x8 v00, v01, v10, v11, t00, t01, t10, t11;
v00 = v_reinterpret_as_s16(v_load_expand(src + x));
v01 = v_reinterpret_as_s16(v_load_expand(src + x + cn));
v10 = v_reinterpret_as_s16(v_load_expand(src + x + stepI));
v11 = v_reinterpret_as_s16(v_load_expand(src + x + stepI + cn));
v_zip(v00, v01, t00, t01);
v_zip(v10, v11, t10, t11);
t0 = v_dotprod(t00, qw0, qdelta) + v_dotprod(t10, qw1);
t1 = v_dotprod(t01, qw0, qdelta) + v_dotprod(t11, qw1);
t0 = t0 >> (W_BITS1-5);
t1 = t1 >> (W_BITS1-5);
v_store(Iptr + x, v_pack(t0, t1));
v00 = v_reinterpret_as_s16(v_load(dsrc));
v01 = v_reinterpret_as_s16(v_load(dsrc + cn2));
v10 = v_reinterpret_as_s16(v_load(dsrc + dstep));
v11 = v_reinterpret_as_s16(v_load(dsrc + dstep + cn2));
v_zip(v00, v01, t00, t01);
v_zip(v10, v11, t10, t11);
t0 = v_dotprod(t00, qw0, qdelta_d) + v_dotprod(t10, qw1);
t1 = v_dotprod(t01, qw0, qdelta_d) + v_dotprod(t11, qw1);
t0 = t0 >> W_BITS1;
t1 = t1 >> W_BITS1;
v00 = v_pack(t0, t1); // Ix0 Iy0 Ix1 Iy1 ...
v_store(dIptr, v00);
v00 = v_reinterpret_as_s16(v_interleave_pairs(v_reinterpret_as_s32(v_interleave_pairs(v00))));
v_expand(v00, t1, t0);
v_float32x4 fy = v_cvt_f32(t0);
v_float32x4 fx = v_cvt_f32(t1);
qA22 = v_muladd(fy, fy, qA22);
qA12 = v_muladd(fx, fy, qA12);
qA11 = v_muladd(fx, fx, qA11);
v00 = v_reinterpret_as_s16(v_load(dsrc + 4*2));
v01 = v_reinterpret_as_s16(v_load(dsrc + 4*2 + cn2));
v10 = v_reinterpret_as_s16(v_load(dsrc + 4*2 + dstep));
v11 = v_reinterpret_as_s16(v_load(dsrc + 4*2 + dstep + cn2));
v_zip(v00, v01, t00, t01);
v_zip(v10, v11, t10, t11);
t0 = v_dotprod(t00, qw0, qdelta_d) + v_dotprod(t10, qw1);
t1 = v_dotprod(t01, qw0, qdelta_d) + v_dotprod(t11, qw1);
t0 = t0 >> W_BITS1;
t1 = t1 >> W_BITS1;
v00 = v_pack(t0, t1); // Ix0 Iy0 Ix1 Iy1 ...
v_store(dIptr + 4*2, v00);
v00 = v_reinterpret_as_s16(v_interleave_pairs(v_reinterpret_as_s32(v_interleave_pairs(v00))));
v_expand(v00, t1, t0);
fy = v_cvt_f32(t0);
fx = v_cvt_f32(t1);
qA22 = v_muladd(fy, fy, qA22);
qA12 = v_muladd(fx, fy, qA12);
qA11 = v_muladd(fx, fx, qA11);
}
#endif
#if CV_NEON
for( ; x <= winSize.width*cn - 4; x += 4, dsrc += 4*2, dIptr += 4*2 )
{
uint8x8_t d0 = vld1_u8(&src[x]);
uint8x8_t d2 = vld1_u8(&src[x+cn]);
uint16x8_t q0 = vmovl_u8(d0);
uint16x8_t q1 = vmovl_u8(d2);
int32x4_t q5 = vmull_s16(vget_low_s16(vreinterpretq_s16_u16(q0)), d26);
int32x4_t q6 = vmull_s16(vget_low_s16(vreinterpretq_s16_u16(q1)), d27);
uint8x8_t d4 = vld1_u8(&src[x + stepI]);
uint8x8_t d6 = vld1_u8(&src[x + stepI + cn]);
uint16x8_t q2 = vmovl_u8(d4);
uint16x8_t q3 = vmovl_u8(d6);
int32x4_t q7 = vmull_s16(vget_low_s16(vreinterpretq_s16_u16(q2)), d28);
int32x4_t q8 = vmull_s16(vget_low_s16(vreinterpretq_s16_u16(q3)), d29);
q5 = vaddq_s32(q5, q6);
q7 = vaddq_s32(q7, q8);
q5 = vaddq_s32(q5, q7);
int16x4x2_t d0d1 = vld2_s16(dsrc);
int16x4x2_t d2d3 = vld2_s16(&dsrc[cn2]);
q5 = vqrshlq_s32(q5, q11);
int32x4_t q4 = vmull_s16(d0d1.val[0], d26);
q6 = vmull_s16(d0d1.val[1], d26);
int16x4_t nd0 = vmovn_s32(q5);
q7 = vmull_s16(d2d3.val[0], d27);
q8 = vmull_s16(d2d3.val[1], d27);
vst1_s16(&Iptr[x], nd0);
int16x4x2_t d4d5 = vld2_s16(&dsrc[dstep]);
int16x4x2_t d6d7 = vld2_s16(&dsrc[dstep+cn2]);
q4 = vaddq_s32(q4, q7);
q6 = vaddq_s32(q6, q8);
q7 = vmull_s16(d4d5.val[0], d28);
int32x4_t q14 = vmull_s16(d4d5.val[1], d28);
q8 = vmull_s16(d6d7.val[0], d29);
int32x4_t q15 = vmull_s16(d6d7.val[1], d29);
q7 = vaddq_s32(q7, q8);
q14 = vaddq_s32(q14, q15);
q4 = vaddq_s32(q4, q7);
q6 = vaddq_s32(q6, q14);
float32x4_t nq0 = vld1q_f32(nA11);
float32x4_t nq1 = vld1q_f32(nA12);
float32x4_t nq2 = vld1q_f32(nA22);
q4 = vqrshlq_s32(q4, q12);
q6 = vqrshlq_s32(q6, q12);
q7 = vmulq_s32(q4, q4);
q8 = vmulq_s32(q4, q6);
q15 = vmulq_s32(q6, q6);
nq0 = vaddq_f32(nq0, vcvtq_f32_s32(q7));
nq1 = vaddq_f32(nq1, vcvtq_f32_s32(q8));
nq2 = vaddq_f32(nq2, vcvtq_f32_s32(q15));
vst1q_f32(nA11, nq0);
vst1q_f32(nA12, nq1);
vst1q_f32(nA22, nq2);
int16x4_t d8 = vmovn_s32(q4);
int16x4_t d12 = vmovn_s32(q6);
int16x4x2_t d8d12;
d8d12.val[0] = d8; d8d12.val[1] = d12;
vst2_s16(dIptr, d8d12);
}
#endif
for( ; x < winSize.width*cn; x++, dsrc += 2, dIptr += 2 )
{
int ival = CV_DESCALE(src[x]*iw00 + src[x+cn]*iw01 +
src[x+stepI]*iw10 + src[x+stepI+cn]*iw11, W_BITS1-5);
// 观察窗中前一帧图像的像素点值(考虑到观察窗边界取整的关系,这里对该像素点周围的像素点进行了加权处理)
int ixval = CV_DESCALE(dsrc[0]*iw00 + dsrc[cn2]*iw01 +
dsrc[dstep]*iw10 + dsrc[dstep+cn2]*iw11, W_BITS1);
// 观察窗中前一帧差分图像 x 方向的像素点值(考虑到观察窗边界取整的关系,这里对该像素点周围的像素点进行了加权处理)
int iyval = CV_DESCALE(dsrc[1]*iw00 + dsrc[cn2+1]*iw01 + dsrc[dstep+1]*iw10 +
dsrc[dstep+cn2+1]*iw11, W_BITS1);
// 观察窗中前一帧差分图像 y 方向的像素点值(考虑到观察窗边界取整的关系,这里对该像素点周围的像素点进行了加权处理)
Iptr[x] = (short)ival;
dIptr[0] = (short)ixval;
dIptr[1] = (short)iyval;
iA11 += (itemtype)(ixval*ixval);// 累加 Ix * Ix
iA12 += (itemtype)(ixval*iyval);// 累加 Ix * Iy
iA22 += (itemtype)(iyval*iyval);// 累加 Iy * Iy
}
}
#if CV_SIMD128 && !CV_NEON
iA11 += v_reduce_sum(qA11);
iA12 += v_reduce_sum(qA12);
iA22 += v_reduce_sum(qA22);
#endif
#if CV_NEON
iA11 += nA11[0] + nA11[1] + nA11[2] + nA11[3];
iA12 += nA12[0] + nA12[1] + nA12[2] + nA12[3];
iA22 += nA22[0] + nA22[1] + nA22[2] + nA22[3];
#endif
A11 = iA11*FLT_SCALE;
A12 = iA12*FLT_SCALE;
A22 = iA22*FLT_SCALE;
float D = A11*A22 - A12*A12; // 行列式
float minEig = (A22 + A11 - std::sqrt((A11-A22)*(A11-A22) +
4.f*A12*A12))/(2*winSize.width*winSize.height);
// 较小特征值
if( err && (flags & OPTFLOW_LK_GET_MIN_EIGENVALS) != 0 )
err[ptidx] = (float)minEig; // 特征点误差值赋较小特征值
if( minEig < minEigThreshold || D < FLT_EPSILON )
// 如果较小特征值小于阈值(特征点特征不明显)或行列式小于阈值(矩阵不可逆)
{
if( level == 0 && status )
status[ptidx] = false; // 特征点状态值赋 false
continue;
}
D = 1.f/D;
nextPt -= halfWin; // 对后一帧特征点 x,y 坐标进行调整使其指向观察窗左上角顶点
Point2f prevDelta;
for( j = 0; j < criteria.maxCount; j++ )
{
inextPt.x = cvFloor(nextPt.x);
inextPt.y = cvFloor(nextPt.y);
if( inextPt.x < -winSize.width || inextPt.x >= J.cols ||
inextPt.y < -winSize.height || inextPt.y >= J.rows )
// 如果特征点观察窗偏离当前图像
{
if( level == 0 && status )
status[ptidx] = false; // 特征点状态值赋 false
break;
}
a = nextPt.x - inextPt.x;
b = nextPt.y - inextPt.y;
iw00 = cvRound((1.f - a)*(1.f - b)*(1 << W_BITS));
iw01 = cvRound(a*(1.f - b)*(1 << W_BITS));
iw10 = cvRound((1.f - a)*b*(1 << W_BITS));
iw11 = (1 << W_BITS) - iw00 - iw01 - iw10;
acctype ib1 = 0, ib2 = 0;
float b1, b2;
#if CV_SIMD128 && !CV_NEON
qw0 = v_int16x8((short)(iw00), (short)(iw01), (short)(iw00), (short)(iw01), (short)(iw00), (short)(iw01), (short)(iw00), (short)(iw01));
qw1 = v_int16x8((short)(iw10), (short)(iw11), (short)(iw10), (short)(iw11), (short)(iw10), (short)(iw11), (short)(iw10), (short)(iw11));
v_float32x4 qb0 = v_setzero_f32(), qb1 = v_setzero_f32();
#endif
#if CV_NEON
float CV_DECL_ALIGNED(16) nB1[] = { 0,0,0,0 }, nB2[] = { 0,0,0,0 };
const int16x4_t d26_2 = vdup_n_s16((int16_t)iw00);
const int16x4_t d27_2 = vdup_n_s16((int16_t)iw01);
const int16x4_t d28_2 = vdup_n_s16((int16_t)iw10);
const int16x4_t d29_2 = vdup_n_s16((int16_t)iw11);
#endif
for( y = 0; y < winSize.height; y++ )
{
const uchar* Jptr = J.ptr() + (y + inextPt.y)*stepJ + inextPt.x*cn;
// 后一帧图像观察窗首地址
const deriv_type* Iptr = IWinBuf.ptr<deriv_type>(y);
const deriv_type* dIptr = derivIWinBuf.ptr<deriv_type>(y);
x = 0;
#if CV_SIMD128 && !CV_NEON
for( ; x <= winSize.width*cn - 8; x += 8, dIptr += 8*2 )
{
v_int16x8 diff0 = v_reinterpret_as_s16(v_load(Iptr + x)), diff1, diff2;
v_int16x8 v00 = v_reinterpret_as_s16(v_load_expand(Jptr + x));
v_int16x8 v01 = v_reinterpret_as_s16(v_load_expand(Jptr + x + cn));
v_int16x8 v10 = v_reinterpret_as_s16(v_load_expand(Jptr + x + stepJ));
v_int16x8 v11 = v_reinterpret_as_s16(v_load_expand(Jptr + x + stepJ + cn));
v_int32x4 t0, t1;
v_int16x8 t00, t01, t10, t11;
v_zip(v00, v01, t00, t01);
v_zip(v10, v11, t10, t11);
t0 = v_dotprod(t00, qw0, qdelta) + v_dotprod(t10, qw1);
t1 = v_dotprod(t01, qw0, qdelta) + v_dotprod(t11, qw1);
t0 = t0 >> (W_BITS1-5);
t1 = t1 >> (W_BITS1-5);
diff0 = v_pack(t0, t1) - diff0;
v_zip(diff0, diff0, diff2, diff1); // It0 It0 It1 It1 ...
v00 = v_reinterpret_as_s16(v_load(dIptr)); // Ix0 Iy0 Ix1 Iy1 ...
v01 = v_reinterpret_as_s16(v_load(dIptr + 8));
v_zip(v00, v01, v10, v11);
v_zip(diff2, diff1, v00, v01);
qb0 += v_cvt_f32(v_dotprod(v00, v10));
qb1 += v_cvt_f32(v_dotprod(v01, v11));
}
#endif
#if CV_NEON
for( ; x <= winSize.width*cn - 8; x += 8, dIptr += 8*2 )
{
uint8x8_t d0 = vld1_u8(&Jptr[x]);
uint8x8_t d2 = vld1_u8(&Jptr[x+cn]);
uint8x8_t d4 = vld1_u8(&Jptr[x+stepJ]);
uint8x8_t d6 = vld1_u8(&Jptr[x+stepJ+cn]);
uint16x8_t q0 = vmovl_u8(d0);
uint16x8_t q1 = vmovl_u8(d2);
uint16x8_t q2 = vmovl_u8(d4);
uint16x8_t q3 = vmovl_u8(d6);
int32x4_t nq4 = vmull_s16(vget_low_s16(vreinterpretq_s16_u16(q0)), d26_2);
int32x4_t nq5 = vmull_s16(vget_high_s16(vreinterpretq_s16_u16(q0)), d26_2);
int32x4_t nq6 = vmull_s16(vget_low_s16(vreinterpretq_s16_u16(q1)), d27_2);
int32x4_t nq7 = vmull_s16(vget_high_s16(vreinterpretq_s16_u16(q1)), d27_2);
int32x4_t nq8 = vmull_s16(vget_low_s16(vreinterpretq_s16_u16(q2)), d28_2);
int32x4_t nq9 = vmull_s16(vget_high_s16(vreinterpretq_s16_u16(q2)), d28_2);
int32x4_t nq10 = vmull_s16(vget_low_s16(vreinterpretq_s16_u16(q3)), d29_2);
int32x4_t nq11 = vmull_s16(vget_high_s16(vreinterpretq_s16_u16(q3)), d29_2);
nq4 = vaddq_s32(nq4, nq6);
nq5 = vaddq_s32(nq5, nq7);
nq8 = vaddq_s32(nq8, nq10);
nq9 = vaddq_s32(nq9, nq11);
int16x8_t q6 = vld1q_s16(&Iptr[x]);
nq4 = vaddq_s32(nq4, nq8);
nq5 = vaddq_s32(nq5, nq9);
nq8 = vmovl_s16(vget_high_s16(q6));
nq6 = vmovl_s16(vget_low_s16(q6));
nq4 = vqrshlq_s32(nq4, q11);
nq5 = vqrshlq_s32(nq5, q11);
int16x8x2_t q0q1 = vld2q_s16(dIptr);
float32x4_t nB1v = vld1q_f32(nB1);
float32x4_t nB2v = vld1q_f32(nB2);
nq4 = vsubq_s32(nq4, nq6);
nq5 = vsubq_s32(nq5, nq8);
int32x4_t nq2 = vmovl_s16(vget_low_s16(q0q1.val[0]));
int32x4_t nq3 = vmovl_s16(vget_high_s16(q0q1.val[0]));
nq7 = vmovl_s16(vget_low_s16(q0q1.val[1]));
nq8 = vmovl_s16(vget_high_s16(q0q1.val[1]));
nq9 = vmulq_s32(nq4, nq2);
nq10 = vmulq_s32(nq5, nq3);
nq4 = vmulq_s32(nq4, nq7);
nq5 = vmulq_s32(nq5, nq8);
nq9 = vaddq_s32(nq9, nq10);
nq4 = vaddq_s32(nq4, nq5);
nB1v = vaddq_f32(nB1v, vcvtq_f32_s32(nq9));
nB2v = vaddq_f32(nB2v, vcvtq_f32_s32(nq4));
vst1q_f32(nB1, nB1v);
vst1q_f32(nB2, nB2v);
}
#endif
for( ; x < winSize.width*cn; x++, dIptr += 2 )
{
int diff = CV_DESCALE(Jptr[x]*iw00 + Jptr[x+cn]*iw01 +
Jptr[x+stepJ]*iw10 + Jptr[x+stepJ+cn]*iw11,
W_BITS1-5) - Iptr[x];
ib1 += (itemtype)(diff*dIptr[0]);
// 累加 dI * Ix
ib2 += (itemtype)(diff*dIptr[1]);
// 累加 dI * Iy
}
}
#if CV_SIMD128 && !CV_NEON
v_float32x4 qf0, qf1;
v_recombine(v_interleave_pairs(qb0 + qb1), v_setzero_f32(), qf0, qf1);
ib1 += v_reduce_sum(qf0);
ib2 += v_reduce_sum(qf1);
#endif
#if CV_NEON
ib1 += (float)(nB1[0] + nB1[1] + nB1[2] + nB1[3]);
ib2 += (float)(nB2[0] + nB2[1] + nB2[2] + nB2[3]);
#endif
b1 = ib1*FLT_SCALE;
b2 = ib2*FLT_SCALE;
Point2f delta( (float)((A12*b2 - A22*b1) * D),
(float)((A12*b1 - A11*b2) * D));
// 光流(速度矢量)
//delta = -delta;
nextPt += delta; // 根据光流调整后一帧特征点 x,y 坐标
nextPts[ptidx] = nextPt + halfWin;
if( delta.ddot(delta) <= criteria.epsilon )
// 光流满足最小迭代阈值
break;
if( j > 0 && std::abs(delta.x + prevDelta.x) < 0.01 &&
std::abs(delta.y + prevDelta.y) < 0.01 )
// 判断光流是否在振荡?
{
nextPts[ptidx] -= delta*0.5f;
break;
}
prevDelta = delta;
}
CV_Assert(status != NULL);
if( status[ptidx] && err && level == 0 && (flags & OPTFLOW_LK_GET_MIN_EIGENVALS) == 0 )
{
Point2f nextPoint = nextPts[ptidx] - halfWin;
Point inextPoint;
inextPoint.x = cvFloor(nextPoint.x);
inextPoint.y = cvFloor(nextPoint.y);
if( inextPoint.x < -winSize.width || inextPoint.x >= J.cols ||
inextPoint.y < -winSize.height || inextPoint.y >= J.rows )
{
if( status )
status[ptidx] = false;
continue;
}
float aa = nextPoint.x - inextPoint.x;
float bb = nextPoint.y - inextPoint.y;
iw00 = cvRound((1.f - aa)*(1.f - bb)*(1 << W_BITS));
iw01 = cvRound(aa*(1.f - bb)*(1 << W_BITS));
iw10 = cvRound((1.f - aa)*bb*(1 << W_BITS));
iw11 = (1 << W_BITS) - iw00 - iw01 - iw10;
float errval = 0.f;
for( y = 0; y < winSize.height; y++ )
{
const uchar* Jptr = J.ptr() + (y + inextPoint.y)*stepJ + inextPoint.x*cn;
const deriv_type* Iptr = IWinBuf.ptr<deriv_type>(y);
for( x = 0; x < winSize.width*cn; x++ )
{
int diff = CV_DESCALE(Jptr[x]*iw00 + Jptr[x+cn]*iw01 +
Jptr[x+stepJ]*iw10 + Jptr[x+stepJ+cn]*iw11,
W_BITS1-5) - Iptr[x];
errval += std::abs((float)diff);
// 累加 abs(I - J)
}
}
err[ptidx] = errval * 1.f/(32*winSize.width*cn*winSize.height);
// 特征点误差值赋平均灰度匹配误差
}
}
}














 4495
4495











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









