










推荐NB_vol关于量化部分的解析,代码思路非常清晰:http://blog.csdn.net/nb_vol_1/article/details/51191935
自己又梳理了一遍,如下:
环路后处理--去方块滤波:
环路后处理包括去方块滤波和样点自适应补偿。去方块滤波主要消除方块效应,SAO则是消除振铃效应。
HEVC中,图形中各个块的量化变换独立进行,另外,运动补偿预测中,相邻开的预测值来自于不同图形的不同位置,因此,在块与块的边界处会出现清晰地不连续像素,严重影响图像的主观质量。对边界进行平滑滤波可以有效降低方块效应。
HEVC中的特点:
1. 亮度和色度,均对8x8的块进行滤波,色度仅当边界两侧有帧内预测时,才进行滤波,滤波次数少。
2. 像素边界最多修正三个像素,可以并行处理。
3. 可以先垂直后水平,处理方式灵活。
处理过程:分为滤波决策和滤波操作。
滤波决策:先获取边界强度值,根据强度值判断是否进行滤波开关决策,最后对需要滤波的边界选择滤波的强弱。
滤波操作:强弱滤波各对应滤波公式。
滤波入口代码为:loopFilterPic对一帧中每个CU进行去方块滤波操作,去方块滤波在量化之后,在SAO之前。
loopFilterPic中涉及到的函数有:
xDeblockCU,对每个CU进行deblock操作,递归调用自己。
xSetLoopfilterParam判断cu的边界是否存在,是否有内部边界,是否跨越Tile边界,以及是否有左、上边界(第一列没有左边界,第一行没有上边界),结果保存在LFCUParam中。
xSetEdgefilterTU
xSetEdgefilterPU由LFCUParam设置TU、PU及内部base_unit(4x4)的块,初始化滤波强度信息,递归调用自己,并保存设置信息。
xGetBoundaryStrengthSingle计算边界强度,过程图如下:保存在m_aapucBS中。
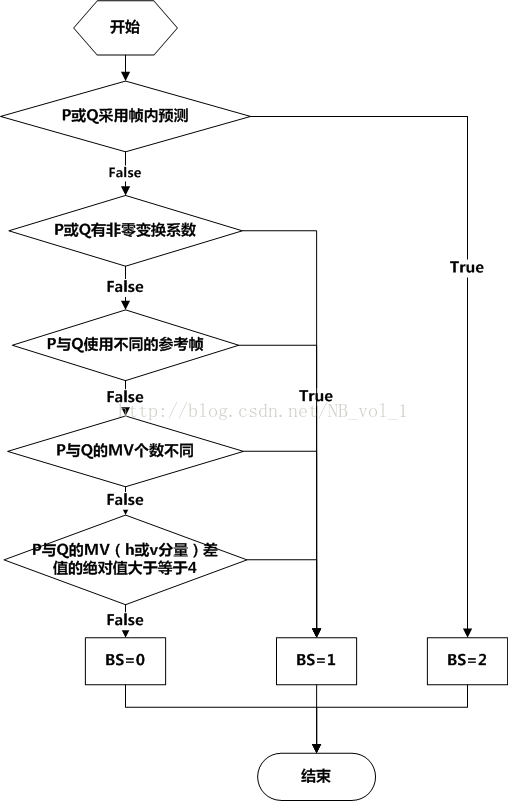
图片源自NB_vol的量化部分博文。
xEdgeFilterLuma对亮度块进行滤波开关判断,并判断是否需要进行强滤波(调用xUseStrongFiltering),最后调用xPelFilterLuma进行实际的滤波计算。
xUseStrongnFiltering完成判定边界处像素是否超阈值的一组公式。
xPelFilterLuma强弱滤波的滤波计算过程
具体涉及到滤波计算的公式请参考《H.265/HEVC:原理、标准与实现》万帅,杨付正编
上P190~P205
下面贴上代码:
1.
Void TComLoopFilter::loopFilterPic( TComPic* pcPic )
{
// Horizontal filtering
//水平滤波
//getNumCUsInFrame获取一帧中的CU的个数,然后对每一个CU进行处理
for ( UInt uiCUAddr = 0; uiCUAddr < pcPic->getNumCUsInFrame(); uiCUAddr++ )
{
TComDataCU* pcCU = pcPic->getCU( uiCUAddr );
::memset( m_aapucBS [EDGE_VER], 0, sizeof( UChar ) * m_uiNumPartitions );
::memset( m_aapbEdgeFilter[EDGE_VER], 0, sizeof( Bool ) * m_uiNumPartitions );
// CU-based deblocking
xDeblockCU( pcCU, 0, 0, EDGE_VER );
}
// Vertical filtering垂直滤波
for ( UInt uiCUAddr = 0; uiCUAddr < pcPic->getNumCUsInFrame(); uiCUAddr++ )
{
TComDataCU* pcCU = pcPic->getCU( uiCUAddr );
::memset( m_aapucBS [EDGE_HOR], 0, sizeof( UChar ) * m_uiNumPartitions );
::memset( m_aapbEdgeFilter[EDGE_HOR], 0, sizeof( Bool ) * m_uiNumPartitions );
// CU-based deblocking
xDeblockCU( pcCU, 0, 0, EDGE_HOR );
}
}
// ====================================================================================================================
// Protected member functions
// ====================================================================================================================
/**
- Deblocking filter process in CU-based (the same function as conventional's)
.
\param Edge the direction of the edge in block boundary (horizonta/vertical), which is added newly
*/
Void TComLoopFilter::xDeblockCU( TComDataCU* pcCU, UInt uiAbsZorderIdx, UInt uiDepth, Int Edge )
{
if(pcCU->getPic()==0||pcCU->getPartitionSize(uiAbsZorderIdx)==SIZE_NONE)
{
return;
}
//获取CU所属图片
TComPic* pcPic = pcCU->getPic();
UInt uiCurNumParts = pcPic->getNumPartInCU() >> (uiDepth<<1);
UInt uiQNumParts = uiCurNumParts>>2;
//获取CU划分深度,这里uiDepth为零,表示最小处理的CU深度
if( pcCU->getDepth(uiAbsZorderIdx) > uiDepth )
{//递归处理每个CU
for ( UInt uiPartIdx = 0; uiPartIdx < 4; uiPartIdx++, uiAbsZorderIdx+=uiQNumParts )
{
//左上角的坐标
UInt uiLPelX = pcCU->getCUPelX() + g_auiRasterToPelX[ g_auiZscanToRaster[uiAbsZorderIdx] ];
UInt uiTPelY = pcCU->getCUPelY() + g_auiRasterToPelY[ g_auiZscanToRaster[uiAbsZorderIdx] ];
if( ( uiLPelX < pcCU->getSlice()->getSPS()->getPicWidthInLumaSamples() ) && ( uiTPelY < pcCU->getSlice()->getSPS()->getPicHeightInLumaSamples() ) )
{
xDeblockCU( pcCU, uiAbsZorderIdx, uiDepth+1, Edge );
}
}
return;
}
//判断CU的边界是否存在,是否有内部边界(即CU划分为PU或TU)、是否拥有左及上边界,边界是否需要滤波
//信息存在LFCUParam中
xSetLoopfilterParam( pcCU, uiAbsZorderIdx );
//由LFCUPArma的信息设置TU及其内部base_unit(4x4)的块,初始化滤波强度信息
xSetEdgefilterTU ( pcCU, uiAbsZorderIdx , uiAbsZorderIdx, uiDepth );
//PU及其内部是否需要滤波
xSetEdgefilterPU ( pcCU, uiAbsZorderIdx );
Int iDir = Edge;
for( UInt uiPartIdx = uiAbsZorderIdx; uiPartIdx < uiAbsZorderIdx + uiCurNumParts; uiPartIdx++ )
{
UInt uiBSCheck;
if( (g_uiMaxCUWidth >> g_uiMaxCUDepth) == 4 )
{
uiBSCheck = (iDir == EDGE_VER && uiPartIdx%2 == 0) || (iDir == EDGE_HOR && (uiPartIdx-((uiPartIdx>>2)<<2))/2 == 0);
}
else
{
uiBSCheck = 1;
}
//是否需要计算边界强度
if ( m_aapbEdgeFilter[iDir][uiPartIdx] && uiBSCheck )
{//计算边界强度
xGetBoundaryStrengthSingle ( pcCU, iDir, uiPartIdx );
}
}
//****滤波开关决策****
UInt uiPelsInPart = g_uiMaxCUWidth >> g_uiMaxCUDepth;
UInt PartIdxIncr = DEBLOCK_SMALLEST_BLOCK / uiPelsInPart ? DEBLOCK_SMALLEST_BLOCK / uiPelsInPart : 1 ;
UInt uiSizeInPU = pcPic->getNumPartInWidth()>>(uiDepth);
for ( UInt iEdge = 0; iEdge < uiSizeInPU ; iEdge+=PartIdxIncr)
{
//对亮度块进行滤波,会判断是否强滤波,调用xPelFilterLuma进行滤波
xEdgeFilterLuma ( pcCU, uiAbsZorderIdx, uiDepth, iDir, iEdge );
if ( (uiPelsInPart>DEBLOCK_SMALLEST_BLOCK) || (iEdge % ( (DEBLOCK_SMALLEST_BLOCK<<1)/uiPelsInPart ) ) == 0 )
{
//对色度块进行滤波
xEdgeFilterChroma ( pcCU, uiAbsZorderIdx, uiDepth, iDir, iEdge );
}
}
}2.
Void TComLoopFilter::xSetLoopfilterParam( TComDataCU* pcCU, UInt uiAbsZorderIdx )
{
UInt uiX = pcCU->getCUPelX() + g_auiRasterToPelX[ g_auiZscanToRaster[ uiAbsZorderIdx ] ];
UInt uiY = pcCU->getCUPelY() + g_auiRasterToPelY[ g_auiZscanToRaster[ uiAbsZorderIdx ] ];
TComDataCU* pcTempCU;
UInt uiTempPartIdx;
m_stLFCUParam.bInternalEdge = ! pcCU->getSlice()->getDeblockingFilterDisable();
if ( (uiX == 0) || pcCU->getSlice()->getDeblockingFilterDisable() )
{//第一个没有左边界,设为false
m_stLFCUParam.bLeftEdge = false;
}
else
{
m_stLFCUParam.bLeftEdge = true;
}
if ( m_stLFCUParam.bLeftEdge )
{//判断跨没跨过Tile边界
pcTempCU = pcCU->getPULeft( uiTempPartIdx, uiAbsZorderIdx, !pcCU->getSlice()->getLFCrossSliceBoundaryFlag(), !m_bLFCrossTileBoundary);
if ( pcTempCU )
{
m_stLFCUParam.bLeftEdge = true;
}
else
{
m_stLFCUParam.bLeftEdge = false;
}
}
//处理过程类似上一段
if ( (uiY == 0 ) || pcCU->getSlice()->getDeblockingFilterDisable() )
{
m_stLFCUParam.bTopEdge = false;
}
else
{
m_stLFCUParam.bTopEdge = true;
}
if ( m_stLFCUParam.bTopEdge )
{
pcTempCU = pcCU->getPUAbove( uiTempPartIdx, uiAbsZorderIdx, !pcCU->getSlice()->getLFCrossSliceBoundaryFlag(), false, !m_bLFCrossTileBoundary);
if ( pcTempCU )
{
m_stLFCUParam.bTopEdge = true;
}
else
{
m_stLFCUParam.bTopEdge = false;
}
}
}3.
Void TComLoopFilter::xSetEdgefilterTU( TComDataCU* pcCU, UInt absTUPartIdx, UInt uiAbsZorderIdx, UInt uiDepth )
{
if( pcCU->getTransformIdx( uiAbsZorderIdx ) + pcCU->getDepth( uiAbsZorderIdx) > uiDepth )
{//是否划分为更小的TU
const UInt uiCurNumParts = pcCU->getPic()->getNumPartInCU() >> (uiDepth<<1);
const UInt uiQNumParts = uiCurNumParts>>2;
for ( UInt uiPartIdx = 0; uiPartIdx < 4; uiPartIdx++, uiAbsZorderIdx+=uiQNumParts )
{
UInt nsAddr = uiAbsZorderIdx;
xSetEdgefilterTU( pcCU,nsAddr, uiAbsZorderIdx, uiDepth + 1 );
}
return;
}
Int trWidth = pcCU->getWidth( uiAbsZorderIdx ) >> pcCU->getTransformIdx( uiAbsZorderIdx );
Int trHeight = pcCU->getHeight( uiAbsZorderIdx ) >> pcCU->getTransformIdx( uiAbsZorderIdx );
UInt uiWidthInBaseUnits = trWidth / (g_uiMaxCUWidth >> g_uiMaxCUDepth);
UInt uiHeightInBaseUnits = trHeight / (g_uiMaxCUWidth >> g_uiMaxCUDepth);
xSetEdgefilterMultiple( pcCU, absTUPartIdx, uiDepth, EDGE_VER, 0, m_stLFCUParam.bInternalEdge, uiWidthInBaseUnits, uiHeightInBaseUnits );
xSetEdgefilterMultiple( pcCU, absTUPartIdx, uiDepth, EDGE_HOR, 0, m_stLFCUParam.bInternalEdge, uiWidthInBaseUnits, uiHeightInBaseUnits );
}
Void TComLoopFilter::xSetEdgefilterPU( TComDataCU* pcCU, UInt uiAbsZorderIdx )
{
const UInt uiDepth = pcCU->getDepth( uiAbsZorderIdx );
const UInt uiWidthInBaseUnits = pcCU->getPic()->getNumPartInWidth () >> uiDepth;
const UInt uiHeightInBaseUnits = pcCU->getPic()->getNumPartInHeight() >> uiDepth;
const UInt uiHWidthInBaseUnits = uiWidthInBaseUnits >> 1;
const UInt uiHHeightInBaseUnits = uiHeightInBaseUnits >> 1;
const UInt uiQWidthInBaseUnits = uiWidthInBaseUnits >> 2;
const UInt uiQHeightInBaseUnits = uiHeightInBaseUnits >> 2;
xSetEdgefilterMultiple( pcCU, uiAbsZorderIdx, uiDepth, EDGE_VER, 0, m_stLFCUParam.bLeftEdge );
xSetEdgefilterMultiple( pcCU, uiAbsZorderIdx, uiDepth, EDGE_HOR, 0, m_stLFCUParam.bTopEdge );
switch ( pcCU->getPartitionSize( uiAbsZorderIdx ) )
{
case SIZE_2Nx2N:
{
break;
}
case SIZE_2NxN:
{
xSetEdgefilterMultiple( pcCU, uiAbsZorderIdx, uiDepth, EDGE_HOR, uiHHeightInBaseUnits, m_stLFCUParam.bInternalEdge );
break;
}
case SIZE_Nx2N:
{
xSetEdgefilterMultiple( pcCU, uiAbsZorderIdx, uiDepth, EDGE_VER, uiHWidthInBaseUnits, m_stLFCUParam.bInternalEdge );
break;
}
case SIZE_NxN:
{
xSetEdgefilterMultiple( pcCU, uiAbsZorderIdx, uiDepth, EDGE_VER, uiHWidthInBaseUnits, m_stLFCUParam.bInternalEdge );
xSetEdgefilterMultiple( pcCU, uiAbsZorderIdx, uiDepth, EDGE_HOR, uiHHeightInBaseUnits, m_stLFCUParam.bInternalEdge );
break;
}
case SIZE_2NxnU:
{
xSetEdgefilterMultiple( pcCU, uiAbsZorderIdx, uiDepth, EDGE_HOR, uiQHeightInBaseUnits, m_stLFCUParam.bInternalEdge );
break;
}
case SIZE_2NxnD:
{
xSetEdgefilterMultiple( pcCU, uiAbsZorderIdx, uiDepth, EDGE_HOR, uiHeightInBaseUnits - uiQHeightInBaseUnits, m_stLFCUParam.bInternalEdge );
break;
}
case SIZE_nLx2N:
{
xSetEdgefilterMultiple( pcCU, uiAbsZorderIdx, uiDepth, EDGE_VER, uiQWidthInBaseUnits, m_stLFCUParam.bInternalEdge );
break;
}
case SIZE_nRx2N:
{
xSetEdgefilterMultiple( pcCU, uiAbsZorderIdx, uiDepth, EDGE_VER, uiWidthInBaseUnits - uiQWidthInBaseUnits, m_stLFCUParam.bInternalEdge );
break;
}
default:
{
break;
}
}
}4.
Void TComLoopFilter::xGetBoundaryStrengthSingle ( TComDataCU* pcCU, Int iDir, UInt uiAbsPartIdx )
{
TComSlice* const pcSlice = pcCU->getSlice();
//pcCUP,pcCUQ代表边界两侧的块
const UInt uiPartQ = uiAbsPartIdx;
TComDataCU* const pcCUQ = pcCU;
UInt uiPartP;
TComDataCU* pcCUP;
UInt uiBs = 0;
//-- Calculate Block Index
if (iDir == EDGE_VER)
{
pcCUP = pcCUQ->getPULeft(uiPartP, uiPartQ, !pcCU->getSlice()->getLFCrossSliceBoundaryFlag(), !m_bLFCrossTileBoundary);
}
else // (iDir == EDGE_HOR)
{
pcCUP = pcCUQ->getPUAbove(uiPartP, uiPartQ, !pcCU->getSlice()->getLFCrossSliceBoundaryFlag(), false, !m_bLFCrossTileBoundary);
}
//-- Set BS for Intra MB : BS = 4 or 3
//如果当前CU或相邻CU使用帧内预测,强度设置为2
if ( pcCUP->isIntra(uiPartP) || pcCUQ->isIntra(uiPartQ) )
{
uiBs = 2;
}
//-- Set BS for not Intra MB : BS = 2 or 1 or 0
//都不是帧内预测
if ( !pcCUP->isIntra(uiPartP) && !pcCUQ->isIntra(uiPartQ) )
{
UInt nsPartQ = uiPartQ;
UInt nsPartP = uiPartP;
//如果TU/PU边界需要滤波,而且当前块或者相邻块的Cbf存在
if ( m_aapucBS[iDir][uiAbsPartIdx] && (pcCUQ->getCbf( nsPartQ, TEXT_LUMA, pcCUQ->getTransformIdx(nsPartQ)) != 0 || pcCUP->getCbf( nsPartP, TEXT_LUMA, pcCUP->getTransformIdx(nsPartP) ) != 0) )
{
//边界强度等于1
uiBs = 1;
}
else
{
//pcCUP表示相邻块(用P表示),pcCUQ表示当前块(用Q表示)
if (iDir == EDGE_HOR)
{
pcCUP = pcCUQ->getPUAbove(uiPartP, uiPartQ, !pcCU->getSlice()->getLFCrossSliceBoundaryFlag(), false, !m_bLFCrossTileBoundary);
}
//如果P或Q有一个是B slice,即二者mv不同
if (pcSlice->isInterB() || pcCUP->getSlice()->isInterB())
{
Int iRefIdx;
TComPic *piRefP0, *piRefP1, *piRefQ0, *piRefQ1;
iRefIdx = pcCUP->getCUMvField(REF_PIC_LIST_0)->getRefIdx(uiPartP);
piRefP0 = (iRefIdx < 0) ? NULL : pcCUP->getSlice()->getRefPic(REF_PIC_LIST_0, iRefIdx);
iRefIdx = pcCUP->getCUMvField(REF_PIC_LIST_1)->getRefIdx(uiPartP);
piRefP1 = (iRefIdx < 0) ? NULL : pcCUP->getSlice()->getRefPic(REF_PIC_LIST_1, iRefIdx);
iRefIdx = pcCUQ->getCUMvField(REF_PIC_LIST_0)->getRefIdx(uiPartQ);
piRefQ0 = (iRefIdx < 0) ? NULL : pcSlice->getRefPic(REF_PIC_LIST_0, iRefIdx);
iRefIdx = pcCUQ->getCUMvField(REF_PIC_LIST_1)->getRefIdx(uiPartQ);
piRefQ1 = (iRefIdx < 0) ? NULL : pcSlice->getRefPic(REF_PIC_LIST_1, iRefIdx);
TComMv pcMvP0 = pcCUP->getCUMvField(REF_PIC_LIST_0)->getMv(uiPartP);
TComMv pcMvP1 = pcCUP->getCUMvField(REF_PIC_LIST_1)->getMv(uiPartP);
TComMv pcMvQ0 = pcCUQ->getCUMvField(REF_PIC_LIST_0)->getMv(uiPartQ);
TComMv pcMvQ1 = pcCUQ->getCUMvField(REF_PIC_LIST_1)->getMv(uiPartQ);
if (piRefP0 == NULL) pcMvP0.setZero();
if (piRefP1 == NULL) pcMvP1.setZero();
if (piRefQ0 == NULL) pcMvQ0.setZero();
if (piRefQ1 == NULL) pcMvQ1.setZero();
//如果P和Q有一个参考帧相同
if ( ((piRefP0==piRefQ0)&&(piRefP1==piRefQ1)) || ((piRefP0==piRefQ1)&&(piRefP1==piRefQ0)) )
{
//P的前向和后向参考帧不同
if ( piRefP0 != piRefP1 ) // Different L0 & L1
{
//P和Q的前向参考帧相同
if ( piRefP0 == piRefQ0 )
{
//P和Q的mv的H向或V向分量是否大于4,如果是,那么强度是1,否则是0。
uiBs = ((abs(pcMvQ0.getHor() - pcMvP0.getHor()) >= 4) ||
(abs(pcMvQ0.getVer() - pcMvP0.getVer()) >= 4) ||
(abs(pcMvQ1.getHor() - pcMvP1.getHor()) >= 4) ||
(abs(pcMvQ1.getVer() - pcMvP1.getVer()) >= 4)) ? 1 : 0;
}
else//P和Q的前向参考帧不同
{
uiBs = ((abs(pcMvQ1.getHor() - pcMvP0.getHor()) >= 4) ||
(abs(pcMvQ1.getVer() - pcMvP0.getVer()) >= 4) ||
(abs(pcMvQ0.getHor() - pcMvP1.getHor()) >= 4) ||
(abs(pcMvQ0.getVer() - pcMvP1.getVer()) >= 4)) ? 1 : 0;
}
}
else // Same L0 & L1
{
uiBs = ((abs(pcMvQ0.getHor() - pcMvP0.getHor()) >= 4) ||
(abs(pcMvQ0.getVer() - pcMvP0.getVer()) >= 4) ||
(abs(pcMvQ1.getHor() - pcMvP1.getHor()) >= 4) ||
(abs(pcMvQ1.getVer() - pcMvP1.getVer()) >= 4)) &&
((abs(pcMvQ1.getHor() - pcMvP0.getHor()) >= 4) ||
(abs(pcMvQ1.getVer() - pcMvP0.getVer()) >= 4) ||
(abs(pcMvQ0.getHor() - pcMvP1.getHor()) >= 4) ||
(abs(pcMvQ0.getVer() - pcMvP1.getVer()) >= 4)) ? 1 : 0;
}
}
//P和Q的参考帧都不相同
else // for all different Ref_Idx
{
//强度设为1
uiBs = 1;
}
}
//都为帧内PSlice
else // pcSlice->isInterP()
{
Int iRefIdx;
TComPic *piRefP0, *piRefQ0;
iRefIdx = pcCUP->getCUMvField(REF_PIC_LIST_0)->getRefIdx(uiPartP);
piRefP0 = (iRefIdx < 0) ? NULL : pcCUP->getSlice()->getRefPic(REF_PIC_LIST_0, iRefIdx);
iRefIdx = pcCUQ->getCUMvField(REF_PIC_LIST_0)->getRefIdx(uiPartQ);
piRefQ0 = (iRefIdx < 0) ? NULL : pcSlice->getRefPic(REF_PIC_LIST_0, iRefIdx);
TComMv pcMvP0 = pcCUP->getCUMvField(REF_PIC_LIST_0)->getMv(uiPartP);
TComMv pcMvQ0 = pcCUQ->getCUMvField(REF_PIC_LIST_0)->getMv(uiPartQ);
if (piRefP0 == NULL) pcMvP0.setZero();
if (piRefQ0 == NULL) pcMvQ0.setZero();
//P、Q绝对值差值大于4强度设为 1
uiBs = ((piRefP0 != piRefQ0) ||
(abs(pcMvQ0.getHor() - pcMvP0.getHor()) >= 4) ||
(abs(pcMvQ0.getVer() - pcMvP0.getVer()) >= 4)) ? 1 : 0;
}
} // enf of "if( one of BCBP == 0 )"
} // enf of "if( not Intra )"
//把强度放进数组中保存起来
m_aapucBS[iDir][uiAbsPartIdx] = uiBs;
}5.
//对亮度块边界进行操作
Void TComLoopFilter::xEdgeFilterLuma( TComDataCU* pcCU, UInt uiAbsZorderIdx, UInt uiDepth, Int iDir, Int iEdge )
{
//获取指向重建YUV的指针
TComPicYuv* pcPicYuvRec = pcCU->getPic()->getPicYuvRec();
//yuv像素的实际地址
Pel* piSrc = pcPicYuvRec->getLumaAddr( pcCU->getAddr(), uiAbsZorderIdx );
Pel* piTmpSrc = piSrc;
//偏移
Int iStride = pcPicYuvRec->getStride();
Int iQP = 0;
Int iQP_P = 0;
Int iQP_Q = 0;
UInt uiNumParts = pcCU->getPic()->getNumPartInWidth()>>uiDepth;
//边界强度信息
UInt uiPelsInPart = g_uiMaxCUWidth >> g_uiMaxCUDepth;
UInt uiBsAbsIdx = 0, uiBs = 0;
Int iOffset, iSrcStep;
Bool bPCMFilter = (pcCU->getSlice()->getSPS()->getUsePCM() && pcCU->getSlice()->getSPS()->getPCMFilterDisableFlag())? true : false;
Bool bPartPNoFilter = false;
Bool bPartQNoFilter = false;
UInt uiPartPIdx = 0;
UInt uiPartQIdx = 0;
TComDataCU* pcCUP = pcCU;
TComDataCU* pcCUQ = pcCU;
Int betaOffsetDiv2 = pcCUQ->getSlice()->getDeblockingFilterBetaOffsetDiv2();
Int tcOffsetDiv2 = pcCUQ->getSlice()->getDeblockingFilterTcOffsetDiv2();
//垂直方向
if (iDir == EDGE_VER)
{
iOffset = 1;
iSrcStep = iStride;
piTmpSrc += iEdge*uiPelsInPart;
}
else // (iDir == EDGE_HOR)
{
iOffset = iStride;
iSrcStep = 1;
piTmpSrc += iEdge*uiPelsInPart*iStride;
}
for ( UInt iIdx = 0; iIdx < uiNumParts; iIdx++ )
{
//获取当前块的索引
uiBsAbsIdx = xCalcBsIdx( pcCU, uiAbsZorderIdx, iDir, iEdge, iIdx);
//得到这一块的边界强度
uiBs = m_aapucBS[iDir][uiBsAbsIdx];
if ( uiBs )
{//边界强度大于0,才需要进行滤波
iQP_Q = pcCU->getQP( uiBsAbsIdx );
uiPartQIdx = uiBsAbsIdx;
// Derive neighboring PU index
if (iDir == EDGE_VER)
{
pcCUP = pcCUQ->getPULeft (uiPartPIdx, uiPartQIdx,!pcCU->getSlice()->getLFCrossSliceBoundaryFlag(), !m_bLFCrossTileBoundary);
}
else // (iDir == EDGE_HOR)
{
pcCUP = pcCUQ->getPUAbove(uiPartPIdx, uiPartQIdx,!pcCU->getSlice()->getLFCrossSliceBoundaryFlag(), false, !m_bLFCrossTileBoundary);
}
iQP_P = pcCUP->getQP(uiPartPIdx);
iQP = (iQP_P + iQP_Q + 1) >> 1;//根据QP来得到阈值IBeta
Int iBitdepthScale = 1 << (g_bitDepthY-8);
Int iIndexTC = Clip3(0, MAX_QP+DEFAULT_INTRA_TC_OFFSET, Int(iQP + DEFAULT_INTRA_TC_OFFSET*(uiBs-1) + (tcOffsetDiv2 << 1)));
Int iIndexB = Clip3(0, MAX_QP, iQP + (betaOffsetDiv2 << 1));
Int iTc = sm_tcTable[iIndexTC]*iBitdepthScale;
Int iBeta = sm_betaTable[iIndexB]*iBitdepthScale;
Int iSideThreshold = (iBeta+(iBeta>>1))>>3;
Int iThrCut = iTc*10;
UInt uiBlocksInPart = uiPelsInPart / 4 ? uiPelsInPart / 4 : 1;
//计算块边界的纹理度,通过这些内容特性来判断是否需要进行滤波操作
for (UInt iBlkIdx = 0; iBlkIdx<uiBlocksInPart; iBlkIdx ++)
{
Int dp0 = xCalcDP( piTmpSrc+iSrcStep*(iIdx*uiPelsInPart+iBlkIdx*4+0), iOffset);
Int dq0 = xCalcDQ( piTmpSrc+iSrcStep*(iIdx*uiPelsInPart+iBlkIdx*4+0), iOffset);
Int dp3 = xCalcDP( piTmpSrc+iSrcStep*(iIdx*uiPelsInPart+iBlkIdx*4+3), iOffset);
Int dq3 = xCalcDQ( piTmpSrc+iSrcStep*(iIdx*uiPelsInPart+iBlkIdx*4+3), iOffset);
Int d0 = dp0 + dq0;
Int d3 = dp3 + dq3;
Int dp = dp0 + dp3;
Int dq = dq0 + dq3;
Int d = d0 + d3;
//d就是最后计算出来的纹理值
if (bPCMFilter || pcCU->getSlice()->getPPS()->getTransquantBypassEnableFlag())
{
// Check if each of PUs is I_PCM with LF disabling
bPartPNoFilter = (bPCMFilter && pcCUP->getIPCMFlag(uiPartPIdx));
bPartQNoFilter = (bPCMFilter && pcCUQ->getIPCMFlag(uiPartQIdx));
// check if each of PUs is lossless coded
bPartPNoFilter = bPartPNoFilter || (pcCUP->isLosslessCoded(uiPartPIdx) );
bPartQNoFilter = bPartQNoFilter || (pcCUQ->isLosslessCoded(uiPartQIdx) );
}
//纹理值越大比表示越不平坦,当它达到一定程度时,表示这是图像本身的特征,而不是方块效应,因此不用滤波
//iBeta是阈值,纹理值让小于它的时候需要进行滤波
if (d < iBeta)
{
Bool bFilterP = (dp < iSideThreshold);
Bool bFilterQ = (dq < iSideThreshold);
//是否需要进行强滤波
Bool sw = xUseStrongFiltering( iOffset, 2*d0, iBeta, iTc, piTmpSrc+iSrcStep*(iIdx*uiPelsInPart+iBlkIdx*4+0))
&& xUseStrongFiltering( iOffset, 2*d3, iBeta, iTc, piTmpSrc+iSrcStep*(iIdx*uiPelsInPart+iBlkIdx*4+3));
for ( Int i = 0; i < DEBLOCK_SMALLEST_BLOCK/2; i++)
{
xPelFilterLuma( piTmpSrc+iSrcStep*(iIdx*uiPelsInPart+iBlkIdx*4+i), iOffset, iTc, sw, bPartPNoFilter, bPartQNoFilter, iThrCut, bFilterP, bFilterQ);
}
}
}
}
}
}
__inline Bool TComLoopFilter::xUseStrongFiltering( Int offset, Int d, Int beta, Int tc, Pel* piSrc)
{
Pel m4 = piSrc[0];
Pel m3 = piSrc[-offset];
Pel m7 = piSrc[ offset*3];
Pel m0 = piSrc[-offset*4];
Int d_strong = abs(m0-m3) + abs(m7-m4);
return ( (d_strong < (beta>>3)) && (d<(beta>>2)) && ( abs(m3-m4) < ((tc*5+1)>>1)) );
}
__inline Void TComLoopFilter::xPelFilterLuma( Pel* piSrc, Int iOffset, Int tc , Bool sw, Bool bPartPNoFilter, Bool bPartQNoFilter, Int iThrCut, Bool bFilterSecondP, Bool bFilterSecondQ)
{
Int delta;
Pel m4 = piSrc[0];
Pel m3 = piSrc[-iOffset];
Pel m5 = piSrc[ iOffset];
Pel m2 = piSrc[-iOffset*2];
Pel m6 = piSrc[ iOffset*2];
Pel m1 = piSrc[-iOffset*3];
Pel m7 = piSrc[ iOffset*3];
Pel m0 = piSrc[-iOffset*4];
if (sw)
{//强滤波,离边界由近及远,滤波脉冲响应分别为:(1,2,2,2,1)/8,(1,1,1,1)/4,(2,3,1,1,1)/8
piSrc[-iOffset] = Clip3(m3-2*tc, m3+2*tc, ((m1 + 2*m2 + 2*m3 + 2*m4 + m5 + 4) >> 3));
piSrc[0] = Clip3(m4-2*tc, m4+2*tc, ((m2 + 2*m3 + 2*m4 + 2*m5 + m6 + 4) >> 3));
piSrc[-iOffset*2] = Clip3(m2-2*tc, m2+2*tc, ((m1 + m2 + m3 + m4 + 2)>>2));
piSrc[ iOffset] = Clip3(m5-2*tc, m5+2*tc, ((m3 + m4 + m5 + m6 + 2)>>2));
piSrc[-iOffset*3] = Clip3(m1-2*tc, m1+2*tc, ((2*m0 + 3*m1 + m2 + m3 + m4 + 4 )>>3));
piSrc[ iOffset*2] = Clip3(m6-2*tc, m6+2*tc, ((m3 + m4 + m5 + 3*m6 + 2*m7 +4 )>>3));
}
else
{
/* Weak filter */
//表示边界处的像素变化程度
delta = (9*(m4-m3) -3*(m5-m2) + 8)>>4 ;
if ( abs(delta) < iThrCut )
{
delta = Clip3(-tc, tc, delta);
piSrc[-iOffset] = ClipY((m3+delta));
piSrc[0] = ClipY((m4-delta));
//是否需要再修正第二个像素
Int tc2 = tc>>1;
if(bFilterSecondP)
{
Int delta1 = Clip3(-tc2, tc2, (( ((m1+m3+1)>>1)- m2+delta)>>1));
piSrc[-iOffset*2] = ClipY((m2+delta1));
}
if(bFilterSecondQ)
{
Int delta2 = Clip3(-tc2, tc2, (( ((m6+m4+1)>>1)- m5-delta)>>1));
piSrc[ iOffset] = ClipY((m5+delta2));
}
}
}
if(bPartPNoFilter)
{
piSrc[-iOffset] = m3;
piSrc[-iOffset*2] = m2;
piSrc[-iOffset*3] = m1;
}
if(bPartQNoFilter)
{
piSrc[0] = m4;
piSrc[ iOffset] = m5;
piSrc[ iOffset*2] = m6;
}
}














 1840
1840

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









