










文章目录
一、如何理解堆?
1.1 体育锦标赛如何赛出前几名?
如果你对体育赛事比较感兴趣,应该了解体育赛事的赛程安排和角逐出冠军、亚军、季军的方法和流程。在单淘汰的锦标赛中,选手们两两比赛,胜者晋级、败者被淘汰,比如世界乒乓球锦标赛或者大满贯网球赛就是这么进行的。这样一来,就可以把比赛的赛程和结果对应成一个二叉树,比如下图是17年美国公开赛的赛程安排,长得跟二叉树很想一模一样吧(觉得不像的话,可以把下图逆时针旋转90°再看):

在上面的二叉树中,每一个选手是二叉树中的一个叶子结点,每一场比赛就相当于两个数字在比大小,数字大的选手获胜进入下一轮,也就是说比大小,大的那个选手进入上一层,成为枝干上的根。所以,进入到某一轮比赛的选手,其实都是某个子树干的根结点,最后的冠军自然就是整个二叉树的根结点。当然,这种赛制的合理性来自于下面一个假设:如果张三赢了李四,李四赢了王五,那么张三一定能赢王五,可以把这个假设称为“输赢的传递性”。
只要上面这种胜负的传递性成立,通过这种比赛的结果得到的冠军,一定是最好的选手。但是,第二名是否如此就难说了,因为冠军一路打下来,被他刷掉的选手可能水平都不差,只是运气不好,提前遇到他了,在决赛之前被淘汰了。比如说在某次网球比赛中,德约科维奇(人称小德)半决赛赢了费德勒,决赛赢了纳达尔,小德的冠军不会有什么异议,但你说到底是纳达尔该得亚军,还是费德勒更厉害,还真不好说,费德勒只能怪自己那次抽签运气不好。因此,如果真要较真,就需要把被冠军淘汰下来的人放到一个组里再相互比赛,才能知道谁是亚军。当然,如果体育比赛规则已经成型,大家遵守就好,不必那么麻烦赛出第二名。
但是,在工程中如果要对比两个数字的大小,总不能说哪个数字最后被最大的比下去,就是第二大的吧。因此,如果采用类似锦标赛的方法排出了一、二、三名来,第一大的数字可以完全按照锦标赛淘汰制的方式来。但是第二大的数字,就需要从所有与最大数字比较过被淘汰的数字中,再次比较选择才能确定,当第二大的数字确定后,就可以用这种方法找到第三大的数字了。这种算法,由于受到锦标赛的启发,因此被称为“锦标赛排序法(也称为树形选择排序)”,这种方法可分为两步:
- 第一步,把所有的数字放到二叉树中的叶子结点,然后按照锦标赛单淘汰的方式,两两比较选出最大的;
- 第二步,对于第二大的,从所有被最大的数字淘汰的数字中选择。比如在某次比赛中,被小德淘汰的分别是纳达尔、费德勒、穆雷等人,那么这些人再进行单淘汰,选亚军。对于第三、第四大的数字,可以以此类推。
如果用这种方法将所有的数字排序,由于除了第一大数字外,后面的每一个次大的数字仅需log2n次比较,故树形选择排序算法的时间复杂度是O(NlogN),和快速排序差不多。那么为什么不直接使用快速排序,而要发明出这样一种不太容易理解的算法呢?因为在特定场合下,它更快速。比如说,如果我们只需要选出第一名,这种算法的复杂度只有O(N),如果还需要选出第二名,则额外增加O(logN)次计算就可以了,对第三名也是如此。也就是说,锦标赛排序算法在从N个选手中选出K个选手的事情中特别快。
从前面的分析可以看出,虽然锦标赛排序法从N个选手中选出K个选手比较快速高效,但在实际工程中,所有的有效数据都在叶子结点,需要向上构建出整棵二叉树来保存每轮比赛的比较结果,这就需要额外占用O(N)的内存地址空间。
为了改善树形选择排序的缺点,1964年提出了新的排序算法 — 堆排序。什么是堆呢?堆排序又是如何巧妙改善树形选择排序算法缺点的呢?
1.2 什么是堆?
堆排序既然是从树形选择排序演化而来,二者之间就会有很大的相似性,在单淘汰锦标赛中,某个子树干根结点的选手成绩肯定是优于其左右两个子结点选手的,且在赛出冠军的过程中,各场比赛构成的二叉树是一棵完全二叉树。
堆也继承了锦标赛排序树的这两个特性,也就是说,堆是满足下面两个要求的二叉树:
- 堆是一个完全二叉树;
- 堆中每个节点的值都大于等于(或者小于等于)其左右子节点的值。
对于每个节点的值都大于等于子树中每个节点值的堆,我们叫作“大顶堆”;对于每个节点的值都小于等于子树中每个节点值的堆,我们叫作“小顶堆”。有了清晰的定义,下面给出几个二叉树,你能判断其是不是堆吗?

其中第 1 个和第 2 个是大顶堆,第 3 个是小顶堆,第 4 个不是堆。除此之外,从图中还可以看出来,对于同一组数据,我们可以构建多种不同形态的堆。
二、堆与堆排序的实现
2.1 如何实现一个堆?
要实现一个堆,我们先要知道,堆都支持哪些操作以及如何存储一个堆。我们之前介绍过,完全二叉树比较适合用数组来存储,用数组来存储完全二叉树是非常节省存储空间的。因为我们不需要存储左右子节点的指针,单纯地通过数组的下标,就可以找到一个节点的左右子节点和父节点。下图是一个用数组存储堆的例子:

从图中我们可以看到,数组中下标为 i 的节点的左子节点,就是下标为 i∗2 的节点,右子节点就是下标为 i∗2+1 的节点,父节点就是下标为 i/2 的节点。
为了方便查看堆的容量和已存储的元素数量,我们可以使用一个结构体来描述一个堆,数据结构实现代码如下:
// datastruct\heap.c
struct HeapStruct{
int capacity;
int size;
DataType *Array;
};
typedef struct HeapStruct *pHeap;
知道了如何存储一个堆,那我们再来看看,堆上的操作有哪些呢?我罗列了几个非常核心的操作,分别是往堆中插入一个元素和删除堆顶元素。(如果没有特殊说明,下面都是拿大顶堆举例)。
- 往堆中插入一个元素
往堆中插入一个元素后,我们需要继续满足堆的两个特性。如果我们把新插入的元素放到堆的最后,插入新元素后就不符合堆的特性了,我们就需要对其进行调整,让其重新满足堆的特性,这个过程我们可以称作堆化(heapify),堆化实际上有两种,从下往上和从上往下。
我先看从下往上的堆化方法,堆化非常简单,就是顺着节点所在的路径,向上或者向下,对比,然后交换。我们可以让新插入的节点与父节点对比大小,如果不满足子节点小于等于父节点的大小关系,我们就互换两个节点。一直重复这个过程,直到父子节点之间满足堆要求的大小关系。下面给出一个从下往上堆化的过程分解图供参考:

按照上述逻辑,编写往堆中插入数据的实现代码如下:
// datastruct\heap.c
void swap_data(int *a, int *b);
void Heap_Insert(pHeap H, DataType x)
{
if(H->size >= H->capacity)
return;
int i;
H->size++;
H->Array[H->size] = x;
// 自下往上堆化
for(i = H->size; i/2 > 0 && H->Array[i] > H->Array[i/2]; i /= 2)
swap_data(&H->Array[i], &H->Array[i/2]);
}
删除堆顶元素
从堆的定义的第二条中,任何节点的值都大于等于(或小于等于)子树节点的值,我们可以发现,堆顶元素存储的就是堆中数据的最大值或者最小值。
假设我们构造的是大顶堆,堆顶元素就是最大的元素。当我们删除堆顶元素之后,就需要把第二大的元素放到堆顶,那第二大元素肯定会出现在左右子节点中。然后我们再迭代地删除第二大节点,以此类推,直到叶子节点被删除。不过这种方法有点问题,就是最后堆化出来的堆并不满足完全二叉树的特性,比如下图所示:

实际上,我们稍微改变一下思路,就可以解决这个问题。我们把最后一个节点放到堆顶,然后利用同样的父子节点对比方法。对于不满足父子节点大小关系的,互换两个节点,并且重复进行这个过程,直到父子节点之间满足大小关系为止,这就是从上往下的堆化方法,分解图示如下:

因为我们移除的是数组中的最后一个元素,而在堆化的过程中,都是交换操作,不会出现数组中的“空洞”,所以这种方法堆化之后的结果,肯定满足完全二叉树的特性。
按照上述逻辑,编写删除堆顶元素的实现代码如下:
// datastruct\heap.c
DataType Heap_RemoveTop(pHeap H)
{
if(H->size <= 0)
return -1;
int i, maxPos;
H->Array[0] = H->Array[1];
H->Array[1] = H->Array[H->size];
H->size--;
// 自上往下堆化
for(i = 1; 2 * i <= H->size; i = maxPos)
{
maxPos = i;
if(H->Array[i] < H->Array[2 * i])
maxPos = 2 * i;
if(2 * i + 1 <= H->size && H->Array[maxPos] < H->Array[2 * i + 1])
maxPos = 2 * i + 1;
if(maxPos == i)
break;
swap_data(&H->Array[i], &H->Array[maxPos]);
}
return H->Array[0];
}
我们编写一个堆插入删除元素的示例程序,验证前面实现的两个操作函数是否有bug,示例程序代码如下:
// datastruct\heap.c
#include <stdio.h>
#include <stdlib.h>
#define DataType int
struct HeapStruct{
int capacity;
int size;
DataType *Array;
};
typedef struct HeapStruct *pHeap;
pHeap Heap_Create(int capacity)
{
pHeap H = malloc(sizeof(struct HeapStruct));
if(H == NULL)
{
printf("Out of space.");
return NULL;
}
H->Array = malloc((capacity + 1) * sizeof(DataType));
if(H->Array == NULL)
{
printf("Out of space.");
free(H);
return NULL;
}
H->capacity = capacity;
H->size = 0;
return H;
}
void swap_data(int *a, int *b);
void Heap_Insert(pHeap H, DataType x);
DataType Heap_RemoveTop(pHeap H);
void HeapPrintf(pHeap H)
{
int i;
printf("Heap element: \n");
for(i = 1; i < H->size; i++)
printf("%d ", H->Array[i]);
printf("\n");
}
int main(void)
{
pHeap H = Heap_Create(100);
Heap_Insert(H, 1);
Heap_Insert(H, 2);
Heap_Insert(H, 3);
Heap_Insert(H, 4);
Heap_Insert(H, 5);
Heap_Insert(H, 6);
Heap_Insert(H, 7);
Heap_Insert(H, 8);
Heap_Insert(H, 9);
HeapPrintf(H);
printf("Remove heap top: %d\n", Heap_RemoveTop(H));
printf("Remove heap top: %d\n", Heap_RemoveTop(H));
HeapPrintf(H);
return 0;
}
上面堆的示例程序运行结果如下:
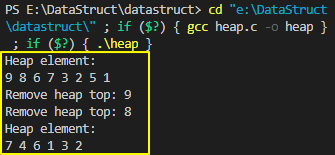
一个包含 n 个节点的完全二叉树,树的高度不会超过 log2n。堆化的过程是顺着节点所在路径比较交换的,所以堆化的时间复杂度跟树的高度成正比,也就是 O(logn)。插入数据和删除堆顶元素的主要逻辑就是堆化,所以,往堆中插入一个元素和删除堆顶元素的时间复杂度都是 O(logn)。
2.2 如何基于堆实现排序?
我们借助于堆这种数据结构实现的排序算法,就叫作堆排序。这种排序方法的时间复杂度非常稳定,是 O(nlogn),并且它还是原地排序算法。如此优秀,它是怎么做到的呢?我们可以把堆排序的过程大致分解成两个大的步骤,建堆和排序。
- 建堆
我们首先将数组原地建成一个堆,所谓“原地”就是,不借助另一个数组,就在原数组上操作。
我们可以借助前面实现往堆中插入一个元素的操作,将原数组分为已完成堆化的部分和剩余元素两部分,不断从后半部分取出首元素插入到前面的堆中,待后半部分元素全部插入前半部分的堆中,原数组就完成了建堆操作(这个处理技巧在前面介绍的插入排序中也用到了)。
但这个过程有点问题,前面介绍堆实现过程时,下标为 0 的存储单元并未使用,使用的存储单元比实际元素个数多 1 个,我们要建堆的原数组可能都是有效元素,使用上面的思路实现就需要对下标为 0 的元素单独处理,或者对原数组进行扩容处理,有没有更好的处理方法呢?
如果堆中的数据从数组下标为 0 的存储单元开始,那么计算子节点和父节点的下标的公式有什么变化呢?假如节点的下标是 i,那左子节点的下标就是 2∗i + 1,右子节点的下标就是 2∗i + 2,父节点的下标就是 (i−1) / 2。按照新的公式改写往堆中插入元素的函数代码如下:
// algorithm\sort.c
void Heap_Insert(pHeap H, DataType x)
{
if(H->size >= H->capacity)
return;
int i;
H->Array[H->size] = x;
H->size++;
// 自下往上堆化
for(i = H->size - 1; i - 1 >= 0 && H->Array[i] > H->Array[(i-1)/2]; i = (i-1)/2)
swap_data(&H->Array[i], &H->Array[(i-1)/2]);
}
按照上述逻辑,对一个数组进行原地建堆的实现代码如下:
// algorithm\sort.c
pHeap Build_Heap(DataType *Arry, int n)
{
pHeap H = malloc(sizeof(struct HeapStruct));
if(H == NULL)
{
printf("Out of space.");
return NULL;
}
int i;
H->Array = Arry;
H->capacity = n;
H->size = 0;
for(i = 0; i < n; i++)
Heap_Insert(H, Arry[i]);
return H;
}
现在,我们来看,建堆操作的时间复杂度是多少呢?每个节点堆化的时间复杂度是 O(logn),那 n 个节点堆化的总时间复杂度是不是就是 O(nlogn) 呢?这个答案虽然也没错,但是这个值还是不够精确。实际上,堆排序的建堆过程的时间复杂度是 O(n),下面来推导一下。
每个节点堆化的过程中,需要比较和交换的节点个数,跟这个节点的高度 k 成正比。我们只需要将每个节点的高度求和,得出的就是建堆的时间复杂度。每一层的节点个数和对应的高度图示如下:

我们将每个非叶子节点的高度求和,就是下面这个公式:

这个公式的求解稍微有点技巧,不过我们高中应该都学过:把公式左右都乘以 2,就得到另一个公式 S2。我们将 S2 错位对齐,并且用 S2 减去 S1,可以得到 S。

S 的中间部分是一个等比数列,所以最后可以用等比数列的求和公式来计算,最终的结果就是下面图中画的这个样子:

因为 h=log2n,代入公式 S,就能得到 S=O(n),所以,建堆的时间复杂度就是 O(n)。
- 排序
建堆结束之后,数组中的数据已经是按照大顶堆的特性来组织的。数组中的第一个元素就是堆顶,也就是最大的元素。我们把它跟最后一个元素交换,那最大元素就放到了下标为 n 的位置。
这个过程有点类似上面讲的“删除堆顶元素”的操作,当堆顶元素移除之后,我们把下标为 n 的元素放到堆顶,然后再通过堆化的方法,将剩下的 n−1 个元素重新构建成堆。堆化完成之后,我们再取堆顶的元素,放到下标是 n−1 的位置,一直重复这个过程,直到最后堆中只剩下标为 1 的一个元素,排序工作就完成了,该过程的分解图示如下:

我们按照堆从数组下标为 0 的存储单元开始,计算子节点与父节点的新公式,改写前面删除堆顶元素的函数代码如下:
// algorithm\sort.c
DataType Heap_RemoveTop(pHeap H)
{
if(H->size <= 0)
return -1;
int i, maxPos;
int top = H->Array[0];
swap_data(&H->Array[0], &H->Array[H->size - 1]);
H->size--;
// 自上往下堆化
for(i = 0; (2 * i + 1) <= H->size - 1; i = maxPos)
{
maxPos = i;
if(H->Array[i] < H->Array[2 * i + 1])
maxPos = 2 * i + 1;
if((2 * i + 2) <= H->size - 1 && H->Array[maxPos] < H->Array[2 * i + 2])
maxPos = 2 * i + 2;
if(maxPos == i)
break;
swap_data(&H->Array[i], &H->Array[maxPos]);
}
return top;
}
按照上述逻辑,编写堆排序的实现代码如下:
// algorithm\sort.c
void Heap_Sort(DataType *Arry, int n)
{
pHeap H = Build_Heap(Arry, n);
if(H == NULL)
return;
while(H->size > 0)
Heap_RemoveTop(H);
free(H);
}
现在,我们再来分析一下堆排序的时间复杂度、空间复杂度以及稳定性。
整个堆排序的过程,都只需要极个别临时存储空间,所以堆排序是原地排序算法。堆排序包括建堆和排序两个操作,建堆过程的时间复杂度是 O(n),排序过程的时间复杂度是 O(nlogn),所以,堆排序整体的时间复杂度是 O(nlogn)。
堆排序不是稳定的排序算法,因为在排序的过程,存在将堆的最后一个节点跟堆顶节点互换的操作,所以就有可能改变值相同数据的原始相对顺序。
- 堆排序与快速排序优劣对比
下面使用一组百万规模的随机数据,跟快速排序对比下执行效率,对比结果如下:

从上面的对比结果也可以看出,虽然堆排序与快速排序的平均时间复杂度都是 O(nlogn),但在实际工程中,如果要对数据序列进行全排序,快速排序的性能明显高于堆排序,主要有以下几个原因:
- 堆排序数据访问的方式没有快速排序对CPU缓存友好。对于快速排序来说,数据是顺序访问的,而对于堆排序来说,数据是跳着访问的。 所以,堆排序的数据访问方式对 CPU 缓存是不友好的;
- 对于同样的数据,在排序过程中,堆排序算法的数据交换次数要多于快速排序。堆排序的第一步是建堆,建堆的过程会打乱数据原有的相对先后顺序,导致原数据的有序度降低。比如,对于一组已经有序的数据来说,经过建堆之后,数据反而变得更无序了。
堆排序相比快速排序的优势就是从N个数据中选出K个最大或最小的数据效率更高,比如大顶堆选出最大元素因需要建堆操作,时间复杂度为O(N),后面选出第二大、第三大……第K大元素的时间复杂度均为O(logN)。
三、堆的应用
3.1 优先级队列
优先级队列,顾名思义,它首先应该是一个队列,队列最大的特性就是先进先出。不过,在优先级队列中,数据的出队顺序不是先进先出,而是按照优先级来,优先级最高的,最先出队。
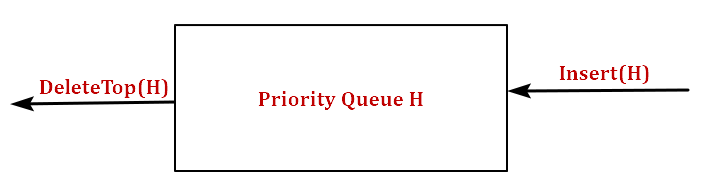
如何实现一个优先级队列呢?方法有很多,但是用堆来实现是最直接、最高效的。这是因为,堆和优先级队列非常相似。一个堆就可以看作一个优先级队列。很多时候,它们只是概念上的区分而已。往优先级队列中插入一个元素,就相当于往堆中插入一个元素;从优先级队列中取出优先级最高的元素,就相当于取出堆顶元素。
你可别小看这个优先级队列,它的应用场景非常多。我们后面要讲的很多数据结构和算法都要依赖它。比如,哈夫曼编码、图的最短路径、最小生成树算法等等。不仅如此,很多语言中,都提供了优先级队列的实现,比如,Java 的 PriorityQueue,C++ 的 priority_queue 等。我们先看看C++中的priority_queue容器是怎么使用的?再举两个具体的例子,感受一下优先级队列具体是怎么用的?
3.1.1 优先级队列STL容器简介(C++11)
C++标准库为优先级队列提供的STL容器是: class priority_queue<>,其中的元素依优先级被读取,它的接口和queue非常相近,即push()将会放入一个元素,top()/pop()将会访问/移除下一个元素。然而这里所谓”下一个元素“并非第一个放入的元素,而是”优先级最高“的元素。

C++11 STL priority_queue的类模板定义如下(第一个参数T为元素类型,第二个参数Container定义priority_queue内部用来存放元素的实际容器,默认采用vector,第三个参数Compare定义”用以查找下一个最高优先级元素“的排序准则,默认以operator < 作为比较准则,也即构造为大顶堆):
// <queue>
namespace std{
template <typename T,
typename Container = vector<T>,
typename Compare = less<typename Container::value_type>>
class priority_queue;
}
实际上priority queue只是很单纯的把各项操作转化为内部容器的对应调用,你可以使用任何线性表容器支持priority queue,只要它们支持random-access iterator和front()、push_back()、pop_back()等操作就行。
如果要定义自己的比较准则,就必须传递一个函数(或function object)作为binary predicate,用以比较两个元素并以此作为排序准则,按照priority queue的默认排序准则,”下一个元素“始终是元素值最大者。
Priority queue容器的核心接口也就三个(当然还有比如查询大小size()、判断是否为空empty()等辅助接口):
- push(): 将一个元素放入priority queue中;
- top(): 返回priority queue内的下一个元素;
- pop(): 从priority queue中移除一个元素。
下面给出一个priority queue应用示例程序供参考:
// datastruct\priority_queue_demo.cpp
#include <iostream>
#include <queue>
int main(void)
{
std::priority_queue<float> pq;
//insert three elements into the priority queue
pq.push(66.6);
pq.push(22.2);
pq.push(44.4);
// read and print two elements
std::cout << pq.top() << ' ';
pq.pop();
std::cout << pq.top() << std::endl;
pq.pop();
//insert three more elements
pq.push(11.1);
pq.push(55.5);
pq.push(33.3);
// skip one element
pq.pop();
// pop and print remaining elements
while (!pq.empty())
{
std::cout << pq.top() << ' ';
pq.pop();
}
std::cout << std::endl;
return 0;
}
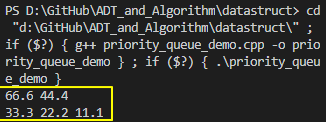
上面priority queue的示例代码运行结果如下(需要注意编译器是否支持C++11,比如g++在4.7以上版本才支持,添加-std=c++11即可):
3.1.2 使用优先级队列合并有序小文件
假设我们有 100 个小文件,每个文件的大小是 100MB,每个文件中存储的都是有序的字符串。我们希望将这些 100 个小文件合并成一个有序的大文件,这里就会用到优先级队列。
整体思路有点像归并排序中的合并函数。我们从这 100 个文件中,各取第一个字符串,放入数组中,然后比较大小,把最小的那个字符串放入合并后的大文件中,并从数组中删除。假设,这个最小的字符串来自于 13.txt 这个小文件,我们就再从这个小文件取下一个字符串,放到数组中,重新比较大小,并且选择最小的放入合并后的大文件,将它从数组中删除。依次类推,直到所有的文件中的数据都放入到大文件为止。
这里我们用数组这种数据结构,来存储从小文件中取出来的字符串。每次从数组中取最小字符串,都需要循环遍历整个数组,时间复杂度为O(n),显然,这不是很高效。有没有更加高效方法呢?
这里就可以用到优先级队列,也可以说是堆。我们将从小文件中取出来的字符串放入到小顶堆中,那堆顶的元素,也就是优先级队列队首的元素,就是最小的字符串。我们将这个字符串放入到大文件中,并将其从堆中删除。然后再从小文件中取出下一个字符串,放入到堆中。循环这个过程,就可以将 100 个小文件中的数据依次放入到大文件中。删除堆顶数据和往堆中插入数据的时间复杂度都是 O(logn),很显然比原来数组存储的方式高效的多。
3.1.3 使用优先级队列实现高性能定时器
假设我们有一个定时器,定时器中维护了很多定时任务,每个任务都设定了一个要触发执行的时间点。定时器每过一个很小的单位时间(比如 1 秒),就扫描一遍任务,看是否有任务到达设定的执行时间。如果到达了,就拿出来执行。
但是,这样每过 1 秒就扫描一遍任务列表的做法比较低效,主要原因有两点:第一,任务的约定执行时间离当前时间可能还有很久,这样前面很多次扫描其实都是徒劳的;第二,每次都要扫描整个任务列表,如果任务列表很大的话,势必会比较耗时。
针对这些问题,我们就可以用优先级队列来解决。我们按照任务设定的执行时间,将这些任务存储在优先级队列中,队列首部(也就是小顶堆的堆顶)存储的是最先执行的任务。
这样,定时器就不需要每隔 1 秒就扫描一遍任务列表了。它拿队首任务的执行时间点,与当前时间点相减,得到一个时间间隔 T。这个时间间隔 T 就是,从当前时间开始,需要等待多久,才会有第一个任务需要被执行。这样,定时器就可以设定在 T 秒之后,再来执行任务。从当前时间点到(T-1)秒这段时间里,定时器都不需要做任何事情。
当 T 秒时间过去之后,定时器取优先级队列中队首的任务执行。然后再计算新的队首任务的执行时间点与当前时间点的差值,把这个值作为定时器执行下一个任务需要等待的时间。
这样,定时器既不用间隔 1 秒就轮询一次,也不用遍历整个任务列表,性能也就提高了。
3.2 利用堆求 Top K
我们可以把这种求 Top K 的问题抽象成两类。一类是针对静态数据集合,也就是说数据集合事先确定,不会再变。另一类是针对动态数据集合,也就是说数据集合事先并不确定,有数据动态地加入到集合中。
针对静态数据,如何在一个包含 n 个数据的数组中,查找前 K 大数据呢?我们可以维护一个大小为 K 的小顶堆,顺序遍历数组,从数组中取出数据与堆顶元素比较。如果比堆顶元素大,我们就把堆顶元素删除,并且将这个元素插入到堆中;如果比堆顶元素小,则不做处理,继续遍历数组。这样等数组中的数据都遍历完之后,堆中的数据就是前 K 大数据了。
遍历数组需要 O(n) 的时间复杂度,一次堆化操作需要 O(logK) 的时间复杂度,所以最坏情况下,n 个元素都入堆一次,时间复杂度就是 O(nlogK)。
针对动态数据求得 Top K 就是实时 Top K。怎么理解呢?举个例子,一个数据集合中有两个操作,一个是添加数据,另一个询问当前的前 K 大数据。如果每次询问前 K 大数据,我们都基于当前的数据重新计算的话,那时间复杂度就是 O(nlogK),n 表示当前的数据的大小。
实际上,我们可以一直都维护一个 K 大小的小顶堆,当有数据被添加到集合中时,我们就拿它与堆顶的元素对比。如果比堆顶元素大,我们就把堆顶元素删除,并且将这个元素插入到堆中;如果比堆顶元素小,则不做处理。这样,无论任何时候需要查询当前的前 K 大数据,我们都可以立刻返回给他。
3.3 利用堆求中位数
中位数,顾名思义,就是处在中间位置的那个数。如果数据的个数是奇数,把数据从小到大排列,那第 n/2 + 1 个数据就是中位数(假设数据是从 0 开始编号的);如果数据的个数是偶数的话,那处于中间位置的数据有两个,第 n / 2 个和第 n/2 + 1 个数据,这个时候,我们可以随意取一个作为中位数,比如取两个数中靠前的那个,就是第 n/2 个数据。
对于一组静态数据,中位数是固定的,我们可以先排序,第 n/2 个数据就是中位数。每次询问中位数的时候,我们直接返回这个固定的值就好了。所以,尽管排序的代价比较大,但是边际成本会很小。但是,如果我们面对的是动态数据集合,中位数在不停地变动,如果再用先排序的方法,每次询问中位数的时候,都要先进行排序,那效率就不高了。
借助堆这种数据结构,我们不用排序,就可以非常高效地实现求中位数操作。我们来看看,它是如何做到的?
我们需要维护两个堆,一个大顶堆,一个小顶堆。大顶堆中存储前半部分数据,小顶堆中存储后半部分数据,且小顶堆中的数据都大于大顶堆中的数据。
也就是说,如果有 n 个数据,n 是偶数,我们从小到大排序,那前 n/2 个数据存储在大顶堆中,后 n/2 个数据存储在小顶堆中。这样,大顶堆中的堆顶元素就是我们要找的中位数。如果 n 是奇数,情况是类似的,大顶堆就存储 n/2 + 1 个数据,小顶堆中就存储 n/2 个数据。

我们前面也提到,数据是动态变化的,当新添加一个数据的时候,我们如何调整两个堆,让大顶堆中的堆顶元素继续是中位数呢?如果新加入的数据小于等于大顶堆的堆顶元素,我们就将这个新数据插入到大顶堆;否则,我们就将这个新数据插入到小顶堆。
这个时候就有可能出现,两个堆中的数据个数不符合前面约定的情况:如果 n 是偶数,两个堆中的数据个数都是 n/2;如果 n 是奇数,大顶堆有 n/2 + 1 个数据,小顶堆有 n/2 个数据。这个时候,我们可以从一个堆中不停地将堆顶元素移动到另一个堆,通过这样的调整,来让两个堆中的数据满足上面的约定。

于是,我们就可以利用两个堆,一个大顶堆、一个小顶堆,实现在动态数据集合中求中位数的操作。插入数据因为需要涉及堆化,所以时间复杂度变成了 O(logn),但是求中位数我们只需要返回大顶堆的堆顶元素就可以了,所以时间复杂度就是 O(1)。
- 利用堆求其它百分位数
实际上,利用两个堆不仅可以快速求出中位数,还可以快速求其它百分位的数据,原理是类似的。比如,“如何快速求服务的 99% 响应时间?”,这里先解释下,什么是“百分位数”和“99%响应时间”。
如果有 n 个数据,将数据从小到大排列之后,99 百分位数大约就是第 n * 99% 个数据,同类,80 百分位数大约就是第 n * 80% 个数据。再来看 99% 响应时间,如果有 100 个服务访问请求,每个服务请求的响应时间都不同,比如 55 毫秒、100 毫秒、23 毫秒等,我们把这 100 个服务的响应时间按照从小到大排列,排在第 99 的那个数据就是 99% 响应时间,也叫 99 百分位响应时间。
弄懂了这些概念,我们再来看如何求 99% 响应时间。我们维护两个堆,一个大顶堆,一个小顶堆。假设当前总数据的个数是 n,大顶堆中保存 n * 99% 个数据,小顶堆中保存 n * 1% 个数据,大顶堆堆顶的数据就是我们要找的 99% 响应时间。
每次插入一个数据的时候,我们要判断这个数据跟大顶堆和小顶堆堆顶数据的大小关系,然后决定插入到哪个堆中。如果这个新插入的数据比大顶堆的堆顶数据小,那就插入大顶堆;如果这个新插入的数据比小顶堆的堆顶数据大,那就插入小顶堆。
但是,为了保持大顶堆中的数据占 99%,小顶堆中的数据占 1%,在每次新插入数据之后,我们都要重新计算,这个时候大顶堆和小顶堆中的数据个数,是否还符合 99:1 这个比例。如果不符合,我们就将一个堆中的数据移动到另一个堆,直到满足这个比例。移动的方法类似前面求中位数的方法,这里就不啰嗦了。
通过这样的方法,每次插入数据,可能会涉及几个数据的堆化操作,所以时间复杂度是 O(logn)。每次求 99% 响应时间的时候,直接返回大顶堆中的堆顶数据即可,时间复杂度是 O(1)。
本章数据结构实现源码下载地址:https://github.com/StreamAI/ADT-and-Algorithm-in-C/tree/master/datastruct
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











