









一、MCP4725介绍
MCP4725是一款12位的,能够输出1-5V指定电压的DAC芯片,通信方式是使用IIC通信。
二、硬件电路图
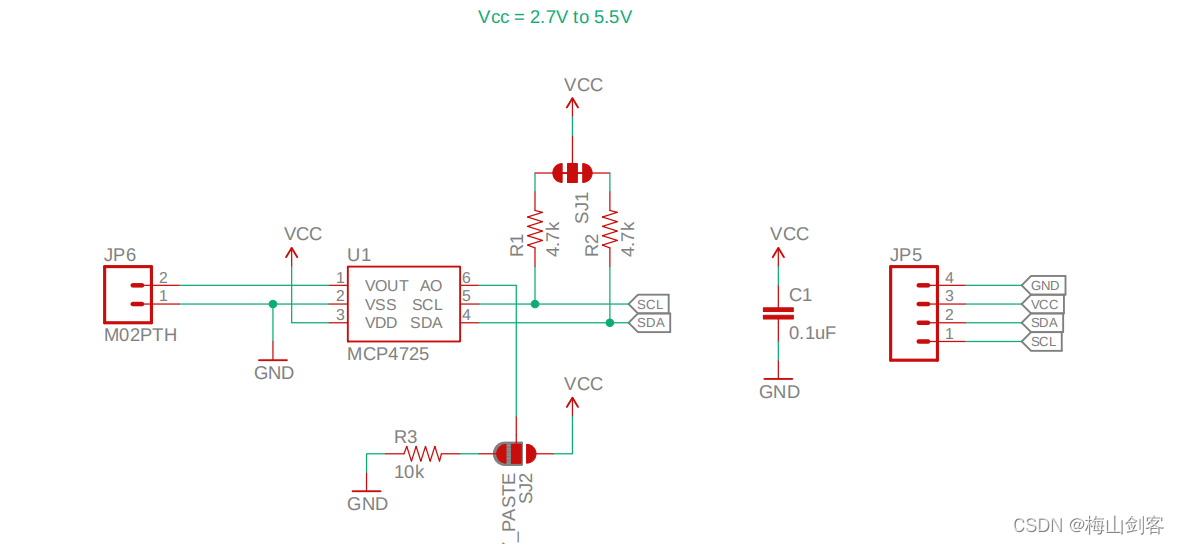
二、编程原理

C0-C2配置工作模式:写为0 0代表快速模式。
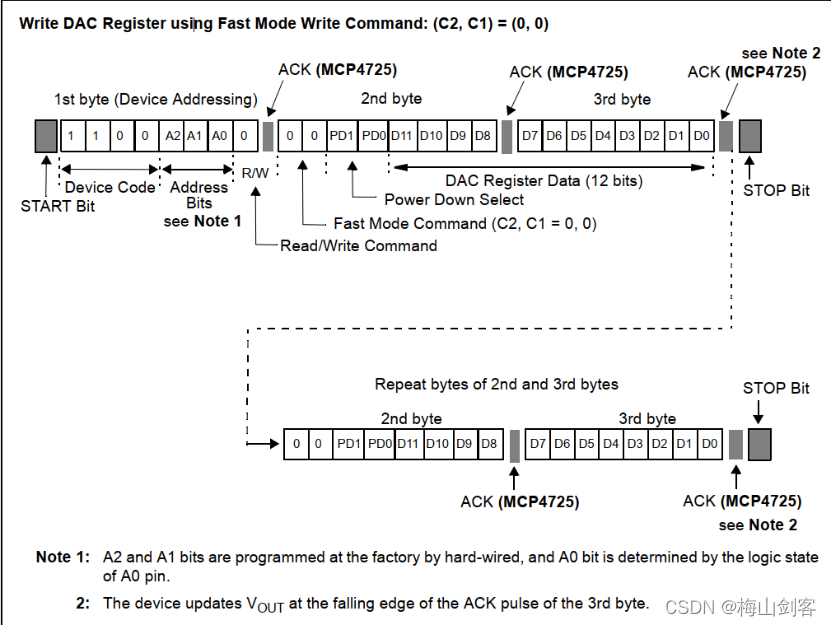
MCP4725设备地址包含4个固定位( 1100 =设备代码)和3个地址位( A2 , A1 , A0 )。A2位和A1位在制造过程中是硬接线的,A0位由A0引脚的逻辑状态决定。A0引脚可与VDD或VSS相连,也可由数字逻辑电平主动驱动。
这里配置A2 , A1 , A0地址位为:0 0 0
因此,得出前8位写入数据为0XC0。
编程过程原理简介:
-
1、IIC发生起始信号。
-
2、写入寄存器DAC Device Code 固定值 1100 , 写入A2,A1,A0为000,写入读写位0,综上,写入数值位0xc0。
-
3、完成第一次写入之后,等待IIC应答位信号。
-
4、写入DAC高4位数据,等待IIC应答位信号。
-
5、写入DAC低8位数据,等待IIC应答位信号。
-
6、发送停止位信号,一次写入数据完成。
三、代码实现
MCP4725.h文件
#ifndef __MCP4725__H
#define __MCP4725__H
#include "myiic.h"
#define VREF 5000
void MCP4725_init(void);
void MCP4725_WriteData_Digital(uint16_t data);
void MCP4725_WriteData_Volatge(uint16_t Vout);
#endif
MCP4725.c文件
#include "MCP4725.h"
#include "delay.h"
uint16_t MCP4725_Init_Value = 3000;
void MCP4725_init(void)
{
IIC_Init();
MCP4725_WriteData_Volatge(MCP4725_Init_Value);
}
void MCP4725_WriteData_Volatge(uint16_t Vout)
{
uint8_t data_h = 0,data_l =0;
data_h= (0x0f00&Vout)>>8; //传输数据高四位
data_l = (0x00ff&Vout);//传输数据低八位
IIC_Start();
IIC_Send_Byte(0xc0);//传输硬件地址
IIC_Wait_Ack();
IIC_Send_Byte(data_h);//传输数据高四位
IIC_Wait_Ack();
IIC_Send_Byte(data_l);//传输数据低八位
IIC_Wait_Ack();
IIC_Stop();
delay_us(10); //完成一轮DAC输出
}
main.c代码实现
int main(void)
{
u16 i=0;
HAL_Init(); //初始化HAL库
Stm32_Clock_Init(336,8,2,7); //设置时钟,168Mhz
delay_init(168); //初始化延时函数
MCP4725_init();
while(1)
{
for(i=0;i<2000;i++)
{
MCP4725_WriteData_Volatge(i);
}
for(i=2000;i>0;i--)
{
MCP4725_WriteData_Volatge(i);
}
}
}
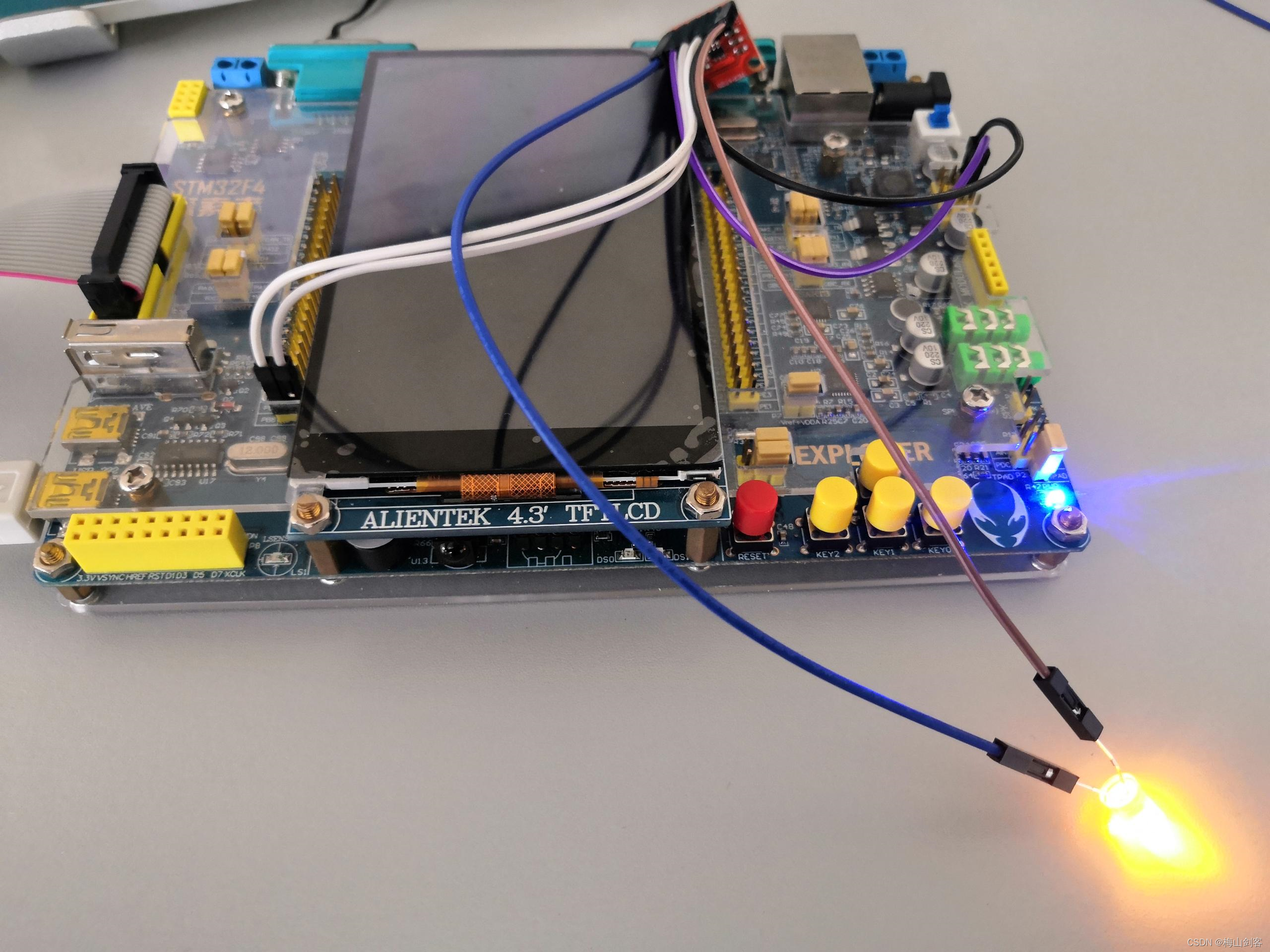
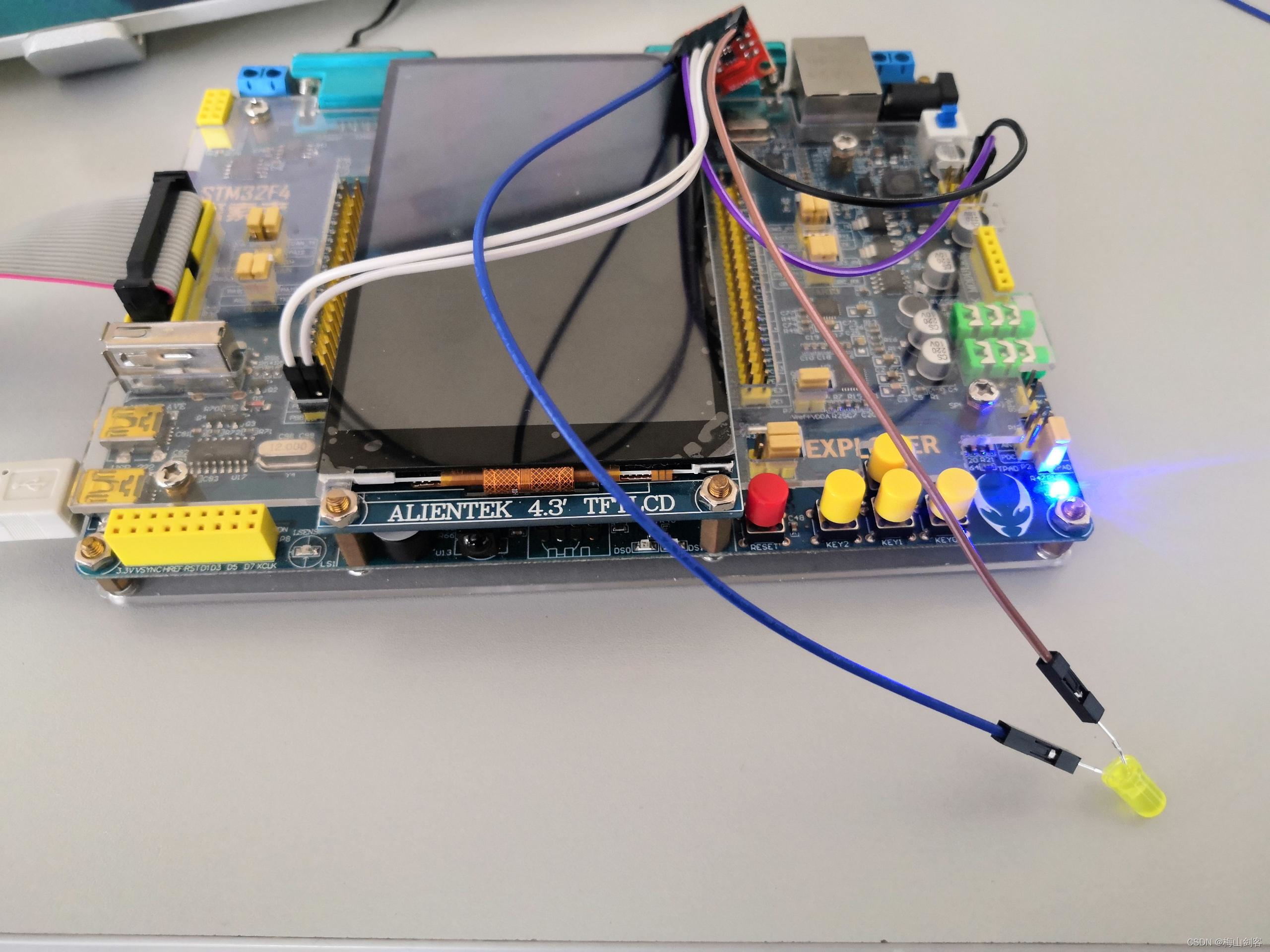
四、实现现象
引脚连接:
SDA——PB9
SCL——PB8
VCC——5V
GND——GND
使用探索者F407开发板,当Vout引脚连接发光二极管的时候,二极管时亮时灭。


















 781
781

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









