







文章目录
一、问题引出
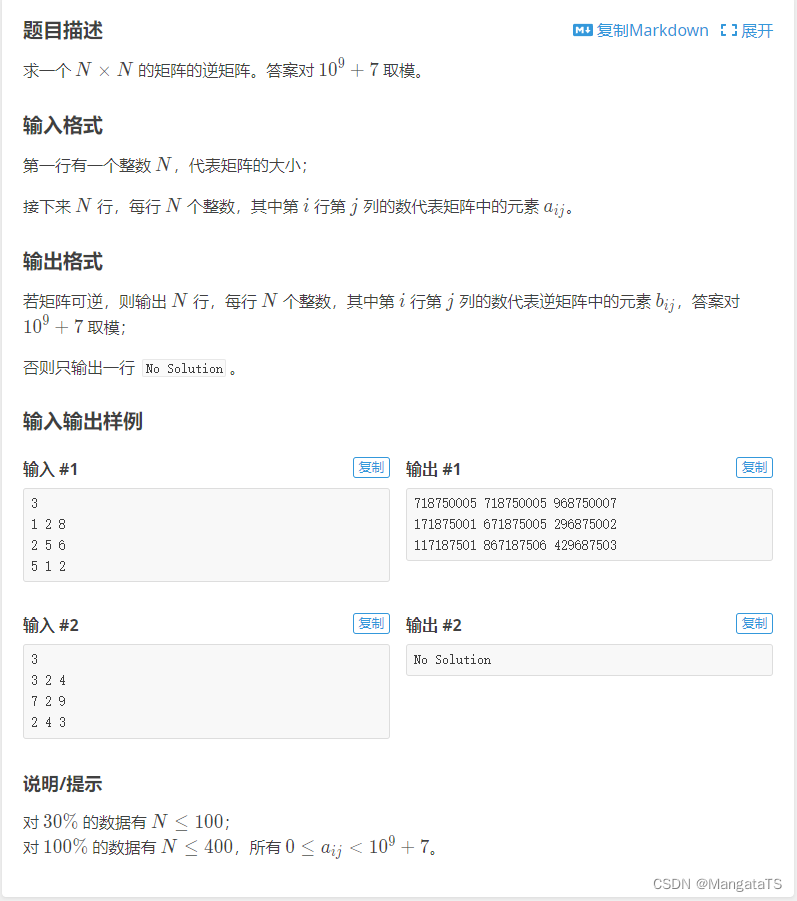
给定一个 n × n n \times n n×n 的矩阵 A A A ,我们想求得一个矩阵 B B B 使得 ∣ A × B ∣ |A \times B| ∣A×B∣ 即 A A A 矩阵和 B B B 矩阵的积矩阵的行列式为 1 1 1 ,那么这个 B B B 矩阵就是 A A A 矩阵的逆矩阵,或者说 A × B A \times B A×B 得到单位矩阵 E E E
二、原理
2.1 矩阵求逆原理
- 我们先构造出一个 n × 2 n n\times 2n n×2n 的增广矩阵 ( A , I n ) (A,I_n) (A,In)
- 然后用高斯消元法将这个增广矩阵化为最简形式 ( I n , A − 1 ) (I_n,A^{-1}) (In,A−1) ,此时的增广部分就是 A A A 矩阵的逆矩阵,如果最后简化的左半部分矩阵不是单位矩阵那么说明矩阵 A A A 不可逆
2.2 矩阵消元原理
- 对于一个矩阵 A A A ,我们从第 1 1 1 行到第 n n n 行不断选取第 i i i 列不为 0 0 0 的行,然后做一个行变换(交换两行,使得当前的第 i i i 行的第 i i i 列不为0)
- 然后将当前的第 i i i 行做一个初等变换,也就是都除以 A [ i ] [ i ] A[i][i] A[i][i] 这样的话就能让第 i i i 行第 i i i 列变为 1 1 1
- 将第 i i i 行下面的所有行的第 i i i 列全部消掉,此时就构成了一个上三角矩阵
- 此时已经构成了一个阶梯型矩阵,我们再从下往上不断将上半矩阵同理消掉即可
三、举例
我们要求的
A
A
A 矩阵如下:
[
2
1
1
3
2
1
2
1
2
]
\begin{bmatrix} 2 \ 1 \ 1 \\ 3 \ 2 \ 1 \\ 2 \ 1 \ 2 \\ \end{bmatrix}
⎣⎡2 1 13 2 12 1 2⎦⎤
- 我们构造出增广矩阵:
[ 2 1 1 1 0 0 3 2 1 0 1 0 2 1 2 0 0 1 ] \begin{bmatrix} 2 \ 1 \ 1 \ 1 \ 0 \ 0 \\ 3 \ 2 \ 1 \ 0 \ 1 \ 0\\ 2 \ 1 \ 2 \ 0 \ 0 \ 1 \\ \end{bmatrix} ⎣⎡2 1 1 1 0 03 2 1 0 1 02 1 2 0 0 1⎦⎤
- 开始行变换,消除下三角
[
1
1
/
2
1
/
2
1
/
2
0
0
0
1
−
1
−
3
2
0
0
0
1
−
1
0
1
]
\begin{bmatrix} 1 \ \ 1/2 \ \ 1/2 \ 1/2 \ 0 \ 0 \\ 0 \ 1 \ \ \ -1 \ -3 \ \ \ 2 \ \ 0\\ 0 \ \ 0 \ \ \ \ 1 \ -1 \ \ \ \ 0 \ \ 1 \\ \end{bmatrix}
⎣⎡1 1/2 1/2 1/2 0 00 1 −1 −3 2 00 0 1 −1 0 1⎦⎤
3. 从下往上消除上三角形
[ 1 0 0 3 − 1 − 1 0 1 0 − 4 2 1 0 0 1 − 1 0 1 ] \begin{bmatrix} 1 \ 0 \ \ 0 \ 3 \ -1 \ -1 \\ 0 \ 1 \ 0 \ -4 \ 2 \ 1\\ 0 \ 0 \ 1 \ -1 \ 0 \ 1 \\ \end{bmatrix} ⎣⎡1 0 0 3 −1 −10 1 0 −4 2 10 0 1 −1 0 1⎦⎤
四、题目链接
https://www.luogu.com.cn/problem/P4783
五、代码实现
5.1 整数逆元逆矩阵
对于这个整数逆元逆矩阵,需要注意的一点是模数最好选择一个质数,否则很容易存在逆元不存在的情况,导致求解出来的逆矩阵不正确
#include<bits/stdc++.h>
#define re register
#define il inline
#define ll long long
using namespace std;
il ll read(){
ll s=0,f=0;char c=getchar();
while(c<'0'||c>'9') f=(c=='-'),c=getchar();
while(c>='0'&&c<='9') s=(s<<3)+(s<<1)+(c^'0'),c=getchar();
return f?-s:s;
}
const int N=405,mod=1e9+7;
int n;
ll a[N][N<<1];
il ll qpow(ll x,ll k){
ll ans=1;
while(k){
if(k&1) ans=ans*x%mod;
x=x*x%mod;
k>>=1;
}
return ans%mod;
}
il void Gauss_j(){
for(re int i=1,r;i<=n;++i){
r=i;
for(re int j=i+1;j<=n;++j)
if(a[j][i]>a[r][i]) r=j;
if(r!=i) swap(a[i],a[r]);
if(!a[i][i]){puts("No Solution");return;}
int kk=qpow(a[i][i],mod-2); //求逆元
for(re int k=1;k<=n;++k){
if(k==i) continue;
int p=a[k][i]*kk%mod;
for(re int j=i;j<=(n<<1);++j)
a[k][j]=((a[k][j]-p*a[i][j])%mod+mod)%mod;
}
for(re int j=1;j<=(n<<1);++j) a[i][j]=(a[i][j]*kk%mod);
//更新当前行 如果放在最后要再求一次逆元,不如直接放在这里
}
for(re int i=1;i<=n;++i){
for(re int j=n+1;j<(n<<1);++j) printf("%lld ",a[i][j]);
printf("%lld\n",a[i][n<<1]);
}
}
int main(){
n=read();
for(re int i=1;i<=n;++i)
for(re int j=1;j<=n;++j)
a[i][j]=read(),a[i][i+n]=1;
Gauss_j();
return 0;
}
5.2 浮点逆矩阵
对于浮点逆矩阵那么直接用高斯消元的方式做就好了
#include<bits/stdc++.h>
using namespace std;
#define ll long long
#define mod 26
#define endl "\n"
#define PII pair<int,int>
#define INF 0x3f3f3f3f
#define EPS 0.00001
const int N = 1e2+10;
ll n;
double a[N][N],b[N][N];
void output(double a[N][N],double b[N][N]){
//调试输出
cout<<"调试输出:左边为A矩阵,右边为B矩阵"<<endl;
for(int i = 1;i <= n; ++i) {
for(int j = 1;j <= n; ++j) {
cout<<a[i][j]<<"\t";
}
for(int j = 1;j <= n; ++j) {
cout<<b[i][j]<<"\t\n"[j == n];
}
}
}
void guss(){
for(ll i = 1;i <= n; ++i) {//枚举当前处理到第几列
for(ll j = i;j <= n; ++j) {//找到一个第i列不为空的行
if(fabs(a[i][i]) > EPS) {
for(ll k = i;k <= n; ++k) //交换i,j行
swap(a[i][k],a[j][k]);
break;
}
}
if(fabs(a[i][i]) < EPS) {
cout<<"不存在逆矩阵"<<endl;
return ;
}
//这里就是将第i行下面所有行的第i列清空,变成一个阶梯型的矩阵
double aii_inv = 1.0/a[i][i];
//将第i行都乘上a[i][i]的逆
a[i][i] = 1.0;
for(ll j = i + 1;j <= n ; ++j) {
a[i][j] = a[i][j] * aii_inv;
}
for(ll j = 1;j <= n; ++j) {
b[i][j] = b[i][j] * aii_inv;
}
//将第i行下面的所有第i列的元素值清空
for(ll j = i + 1;j <= n; ++j) {
for(ll k = i + 1;k <= n; ++k) {
a[j][k] = a[j][k] - a[i][k] * a[j][i];
}
for(ll k = 1;k <= n; ++k) {
b[j][k] = b[j][k] - b[i][k] * a[j][i];
}
a[j][i] = 0.0;
}
}
output(a,b);
//从下往上第推删除A矩阵第i列后的所有元素
for(int i = n; i >= 1; -- i) {
for(int j = i - 1;j >= 1; --j) {
for(int k = 1;k <= n; ++k) {
//处理的是第i行和第j行的数据
b[j][k] = b[j][k] - a[j][i] * b[i][k];
}
a[j][i] = 0.0;
}
}
cout<<"A矩阵的逆矩阵:"<<endl;
//到了这里说明A矩阵已经变为单位矩阵了,此时的B矩阵就是A矩阵的逆矩阵了
for(int i = 1;i <= n; ++i) {
for(int j = 1;j <= n; ++j) {
cout<<b[i][j]<<"\t\n"[j == n];
}
}
}
int main()
{
string s;
cin>>n;
for(int i = 1;i <= n; ++i)
for(int j = 1;j <= n; ++j) {
cin>>a[i][j];
b[i][j] = (i==j?1.0:0.0);
}
guss();
return 0;
}
/*
A
3
2 1 1
3 2 1
2 1 2
逆矩阵:
3 -1 -1
-4 2 1
-1 0 1
*/
六、拓展:逆矩阵求法
至于这一部分的资料,大家可以自行搜索噢
6.1 LU分解法
LU分解法其实是高斯消元法的一种变种算法。LU分解是将矩阵A分解为一个下三角矩阵与一个上三角矩阵的乘积。所谓的三角阵就是一半为零的矩阵。L是下三角矩阵(Lower TriangularMatrix),即主对角线以上的元素全部都是0的矩阵。U是上三角矩阵(Upper Triangular Matrix),即主对角线以下的元素全部都是0的矩阵。
A
=
L
U
A
−
1
=
U
−
1
L
−
1
A=LU \\ A^{-1}=U^{-1}L^{-1}
A=LUA−1=U−1L−1
然LU分解是高斯消元法的一种表现形式,但是相对于高斯消元法,LU分解更易于实现并行化。计算机基本用这种方法。比如求
50000
×
50000
50000\times 50000
50000×50000 的这种大型矩阵。
6.2 SVD分解法
SingularValue Decomposition分解法也叫做奇异值分解,也是线性代数中十分重要的矩阵分解法,同样的能用来求解矩阵的逆矩阵。不同于LU分解中将矩阵A分解为下三角矩阵L与上三角矩阵U的乘积,SVD分解将矩阵A分解为三个矩阵的乘积,分别为:正交矩阵U、对角矩阵W以及正交矩阵V的转置矩阵V.
A = U W V T A − 1 = V W − 1 U T A=UWV^T \\ A^{-1}=VW^{-1}U^T A=UWVTA−1=VW−1UT
6.3 QR分解法
QR分解同样将原始矩阵A分解为两个矩阵的乘积,不同的是这两个矩阵分别为正交矩阵Q和上三角矩阵R。
A = Q R A − 1 = R − 1 Q − 1 A=QR \\ A^{-1}=R^{-1}Q^{-1} A=QRA−1=R−1Q−1


















 678
678

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











