






前言
最近做课设要用到L298N,网上搜了一堆教程,但都没看到具体的stm32连接l298n的小白级教程,然后卡了很久。最后参考这位博主的接线才做成功
以下是本篇文章正文内容,下面案例可供参考
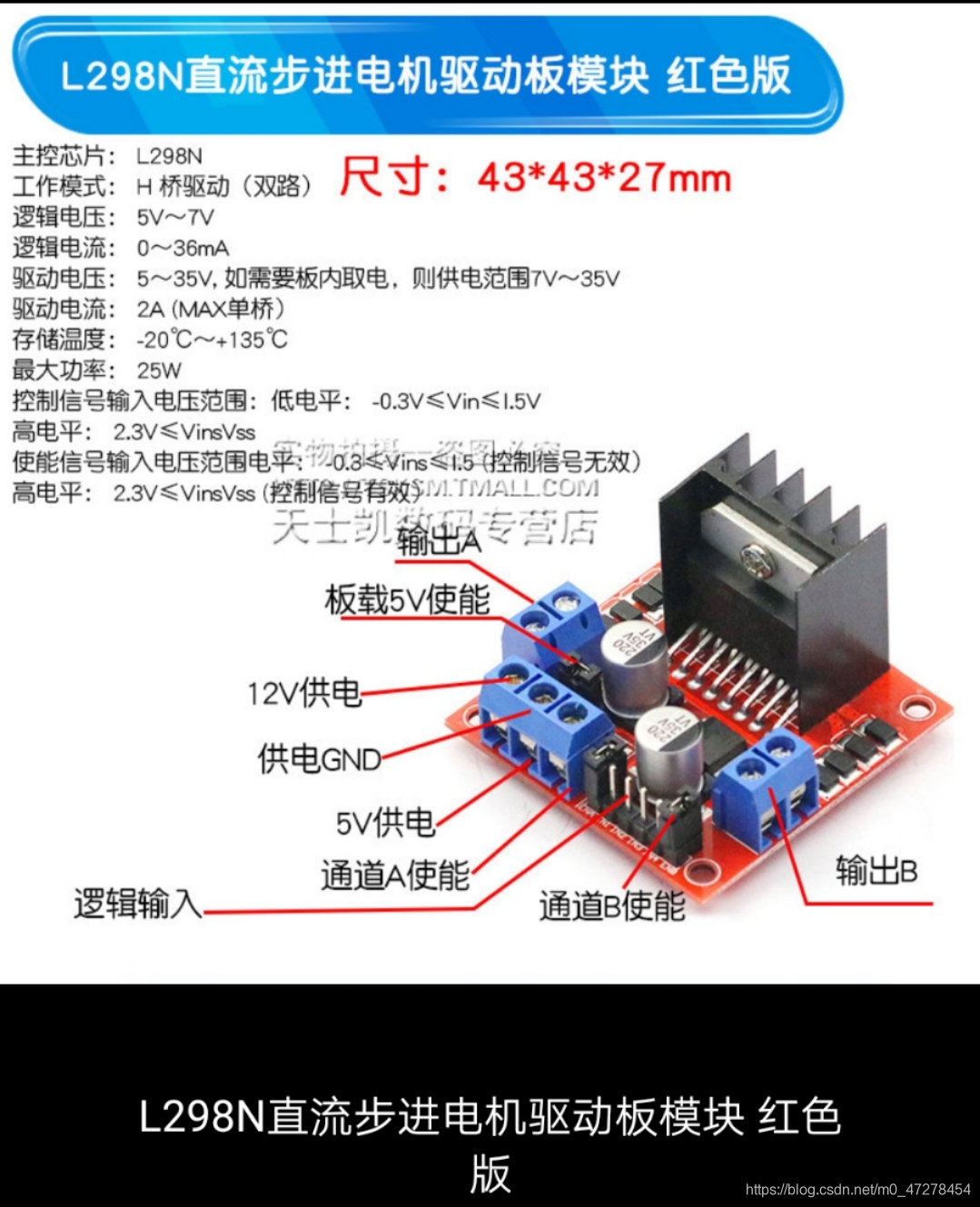
一、L298N的具体参数
首先上图(某宝给的的参考图):
二、L298N接线步骤
1.第一种方法:外接电源5V
比如说直接通过单片机的5v输出作为外接电源供电的话,因为L298N模块里面稳压管的输入和输出有个压差,如果给电机的供电太低的话(5v),通过压差后可能会降低太多,那么逻辑控制部分所要求的5v电压可能就达不到了,可能会导致驱动电机时动一下停一下,此时需要将板上5伏使能断开(拔掉跳冒),然后外接5v的电源来给逻辑控制部分供电。(即把l298n的12v输入与5v输出同时接单片机的5v管脚,并且GND要与单片机共地!!!)
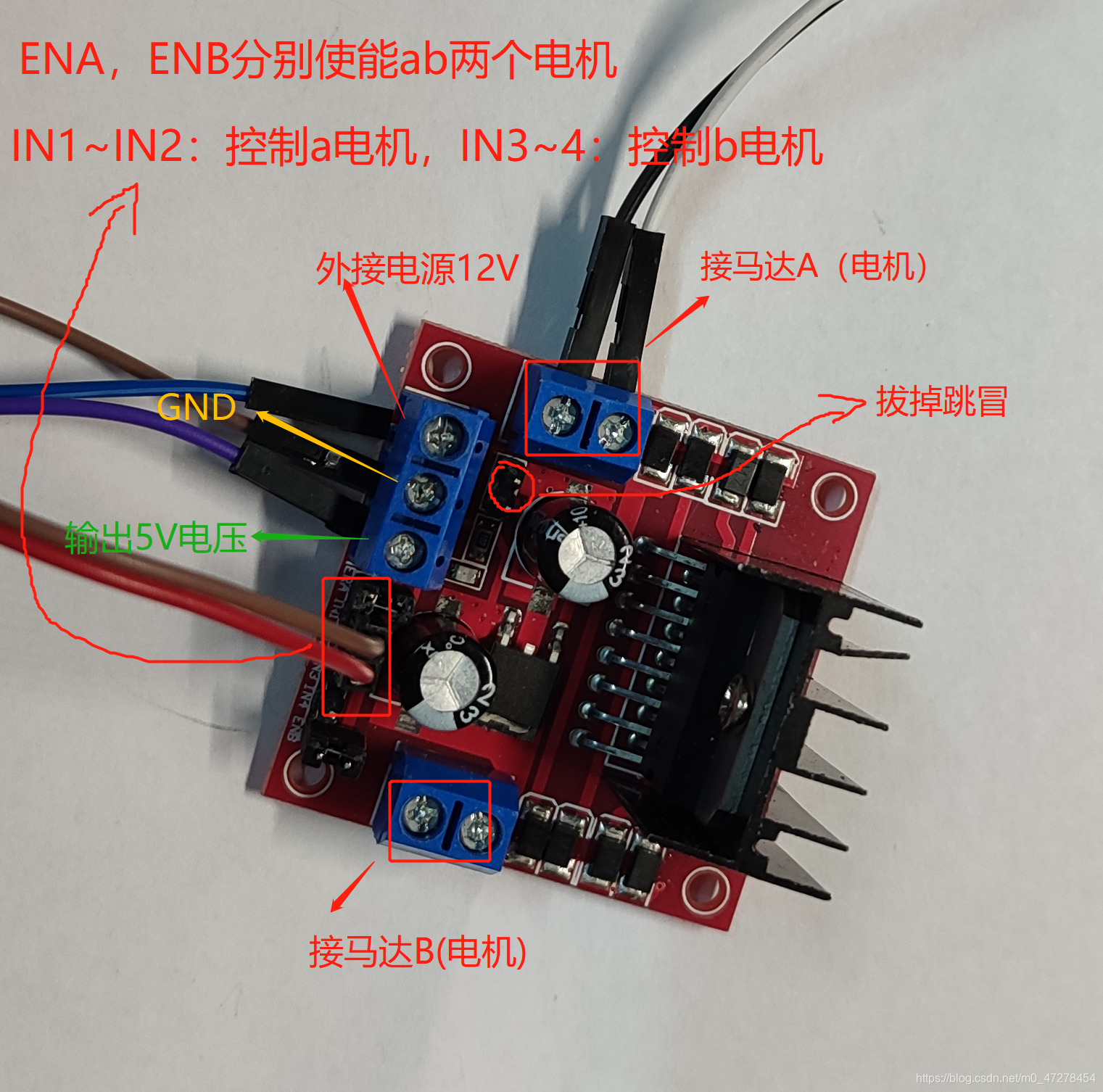
2.第二种方法:外接12V电源
如果说接的电源是7~12V的话(某宝卖的9v电池或者稳压电源),就需要插上跳线帽,电源正负极接l298n的12输入和GND,5v输出可以空着,IN1~IN4接具体的单片机IO口。
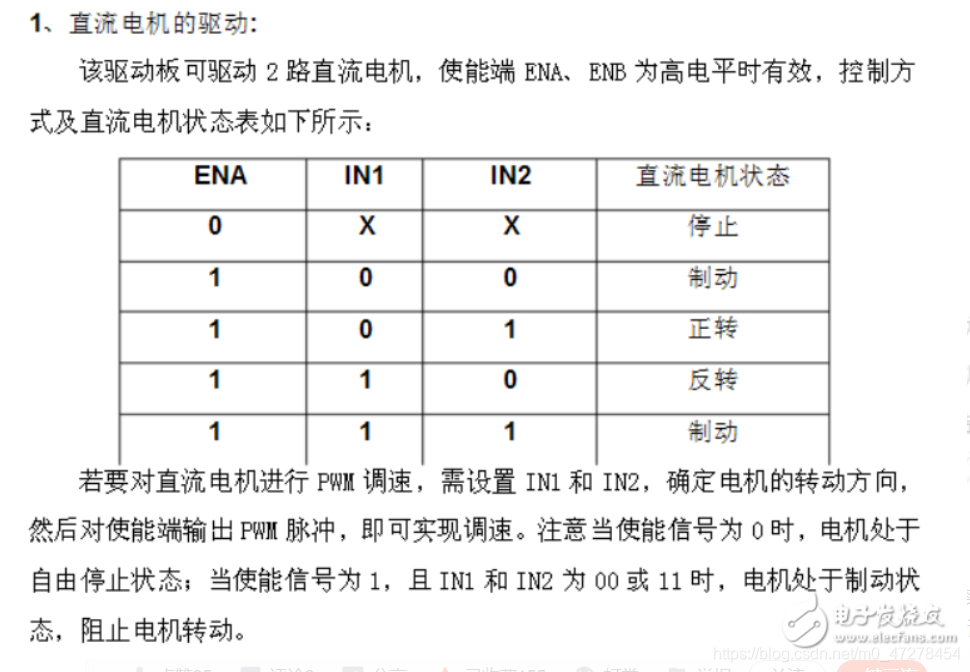
三、L298N的驱动逻辑实现
stm32f103xxxx编程实现:
1.配置IO口
//配置I/O口 PA5、6
void L298N_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;//设置结构体
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //开启IO时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5| GPIO_Pin_6;//配置要使用的IO
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//端口速度50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure);//写入寄存器
}2.控制电机正反转
void L298N_Roll(void)
{
u8 i;
delay_init();
// ENA=1;
IN1=1;//正转
IN2=0;
}因为我做的课设并不需要控制电机正转反转,所以就没有使能ENA,直接pwm控制IN1,IN2就行(如果你们的需要控制电机正反转的话就需要拔掉ENA、ENB上的跳线帽并使能这个IO端口)
3.定义宏
#ifndef __MOTOR_H
#define __MOTOR_H
#include"sys.h"
#include"delay.h"
//#define ENA PAout(4)
#define IN1 PAout(5)
#define IN2 PAout(6)
void L298N_Init(void);
void L298N_Roll(void);
#endif4.最后main函数调用 L298N_Init(); L298N_Roll();就行了。


















 2616
2616

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











