






第二章 智能体
智能体和环境
定义:任何通过传感器(sensor)感知环境(environment)并通过执行器(actuator)作用于该环境 的事物都可以被视为智能体(agent)。
智能体的行为由智能体函数描述,该函数将任意给定的感知序列映射到一个动作,但这个函数理论上是无限的,作为其实现,实际上是智能体程序,其可以在物理系统中运行。
理性的概念
理性智能体:做正确事情的事物
(1)性能度量(什么是良好行为)
由于需要确保“施以机器的目的是我们真正想要的目的”,因此,结果论常常是针对人工智能的性能度量方法。
(2)理性
理性取决于以下4方面:定义成功标准的性能度量; 智能体对环境的先验知识; 智能体可以执行的动作; 智能体到目前为止的感知序列。
因此,理性智能体的定义是:对于每个可能的感知序列,给定感知序列提供的证据和智能体所拥有的任何先 验知识,理性智能体应该选择一个期望最大化其性能度量的动作。
(3)全知、学习和自主
主要是强调,理性不等同于完美,其不可能全知,理性使期望性能最大化,而完美使实际性能最大化。我们不可能要求智能体全知且完美,但由于其在训练时仅能获取迄今为止的信息,因此,信息收集是必要的,可以极大地提高智能体的理性性能(在线学习?)。同时还希望其能够从它所感知到的东西中学习 。其学习能力决定了其是否具有自主性。
环境的本质
任务环境其实就是问题本身。(建模的一种?)
(1)指定任务环境
PEAS描述:性能度量、环境、执行器、传感器
(2)任务环境的几种分类
完全可观测的和部分可观测的
单智能体的和多智能体的
确定性的和非确定性的
回合式的和序贯的
静态的和动态的
离散的和连续的
已知的和未知的
最困难的情况是部分可观测的、多智能体的、非确定性的、序贯的、动态的、连续的且未知 的。
智能体的结构
智能体架构:智能体 = 架构 + 程序 (1)智能体程序
表驱动的一种程序
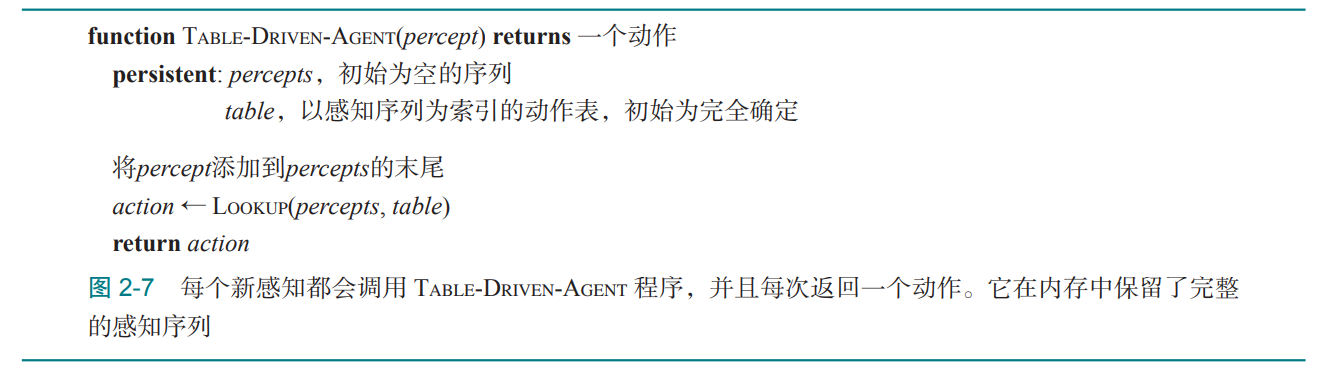
其缺点在于无法事先实现一切决策表,这使得其复杂度过高且不可穷举。
4种简单智能体程序:
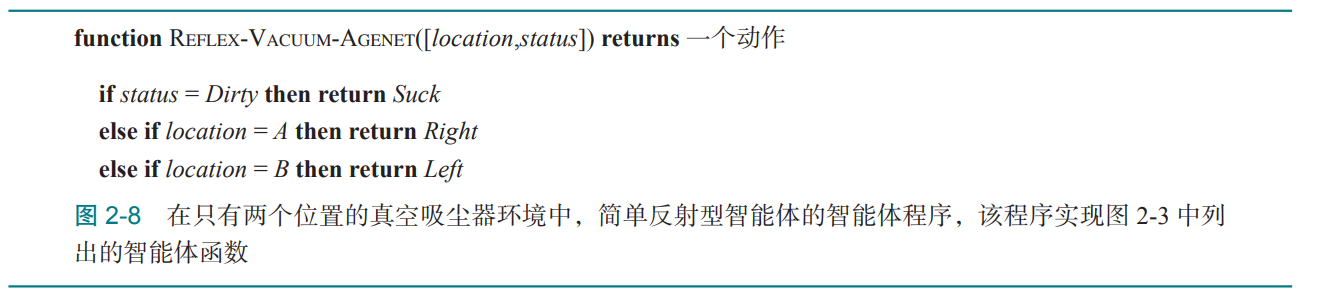
(2)简单反射型智能体
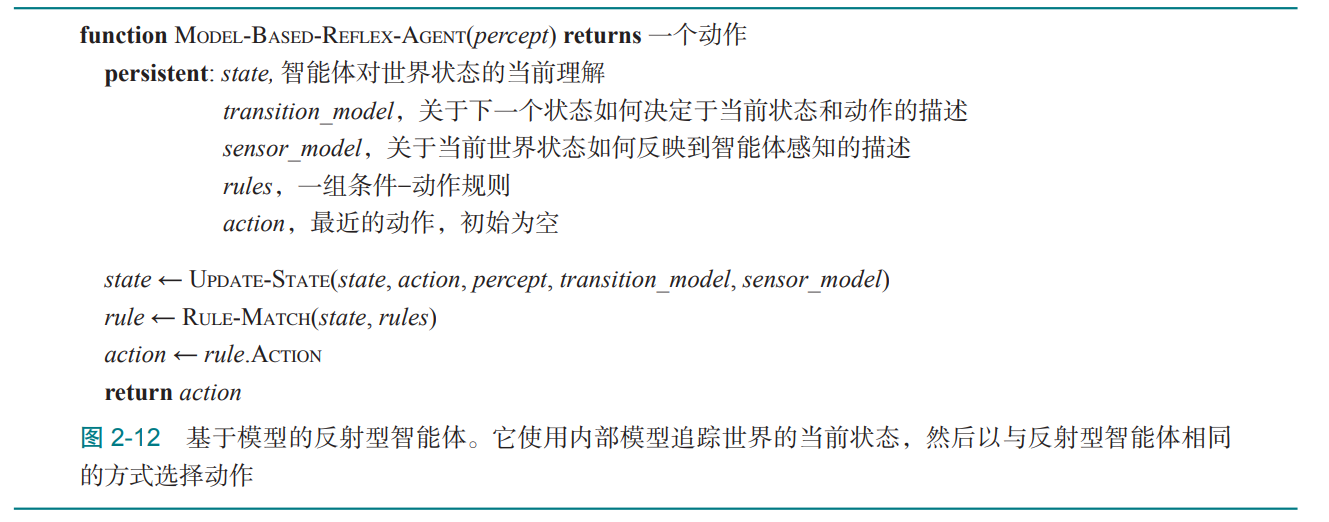
(3)基于模型的反射型智能体
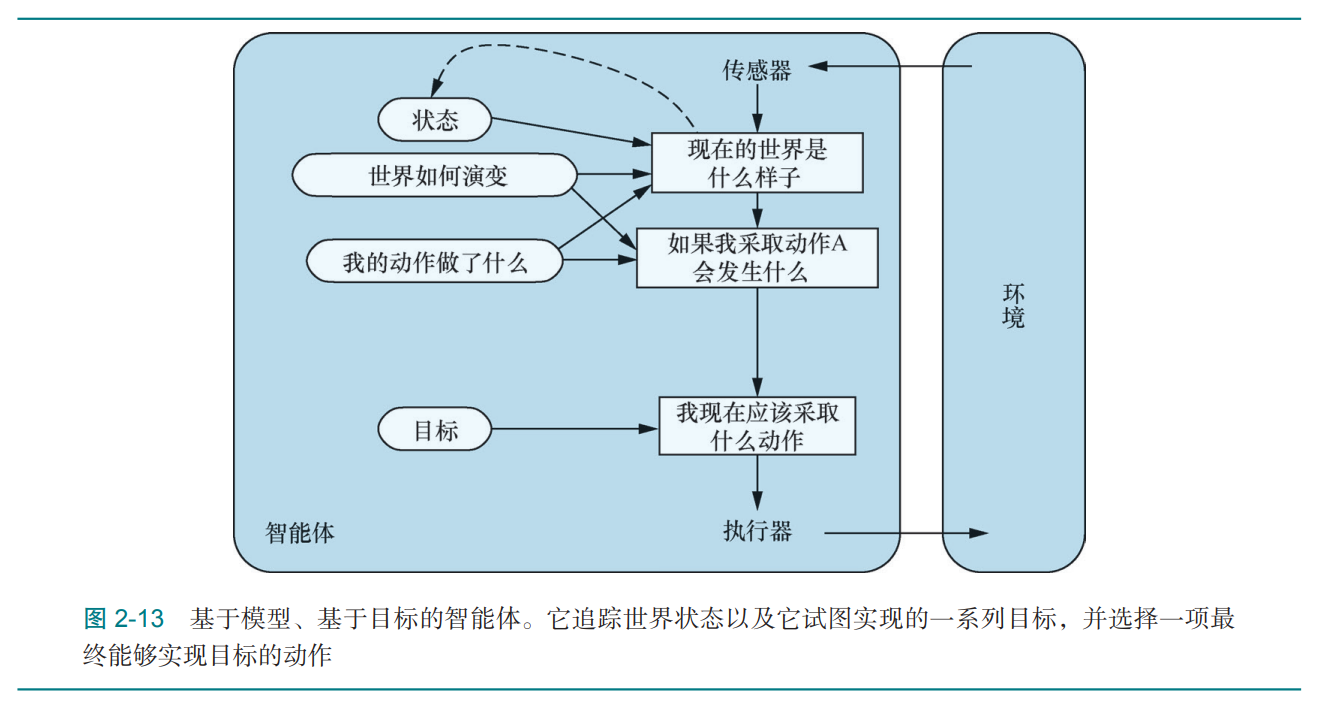
(4)基于目标的智能体
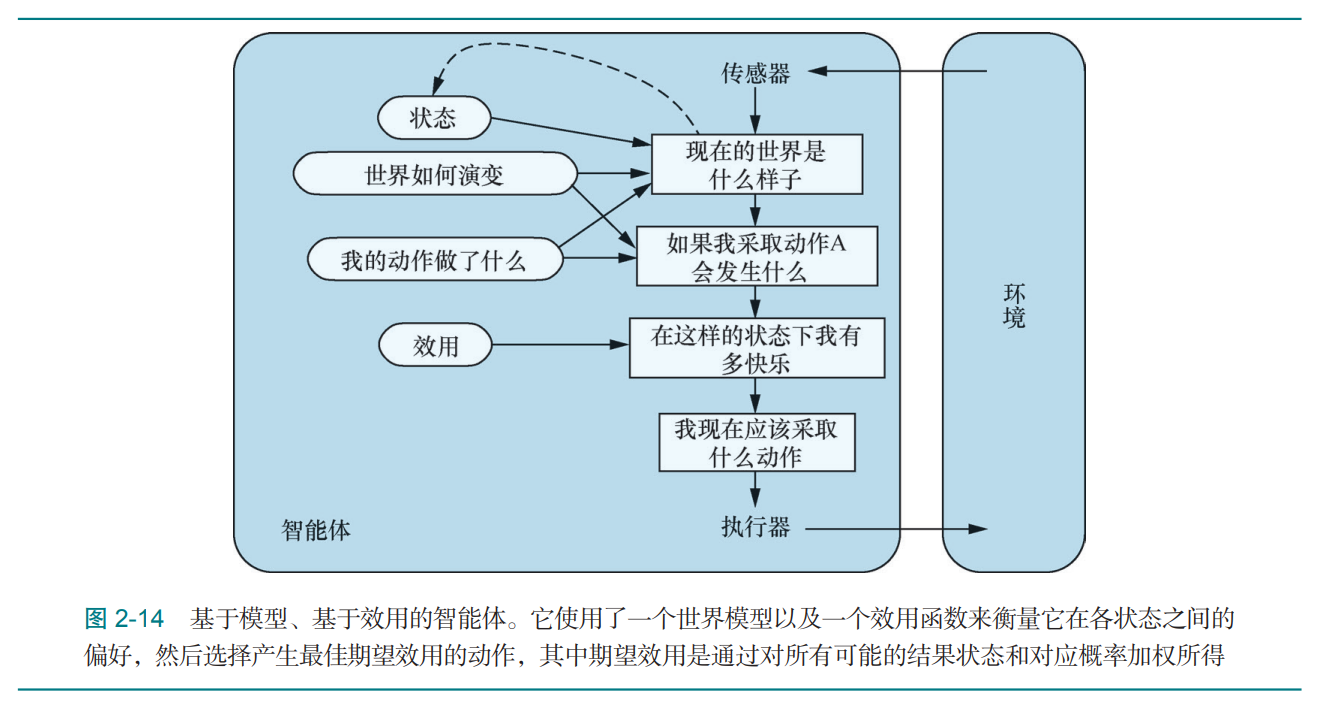
(5)基于效用的智能体
(有点类似强化学习??)
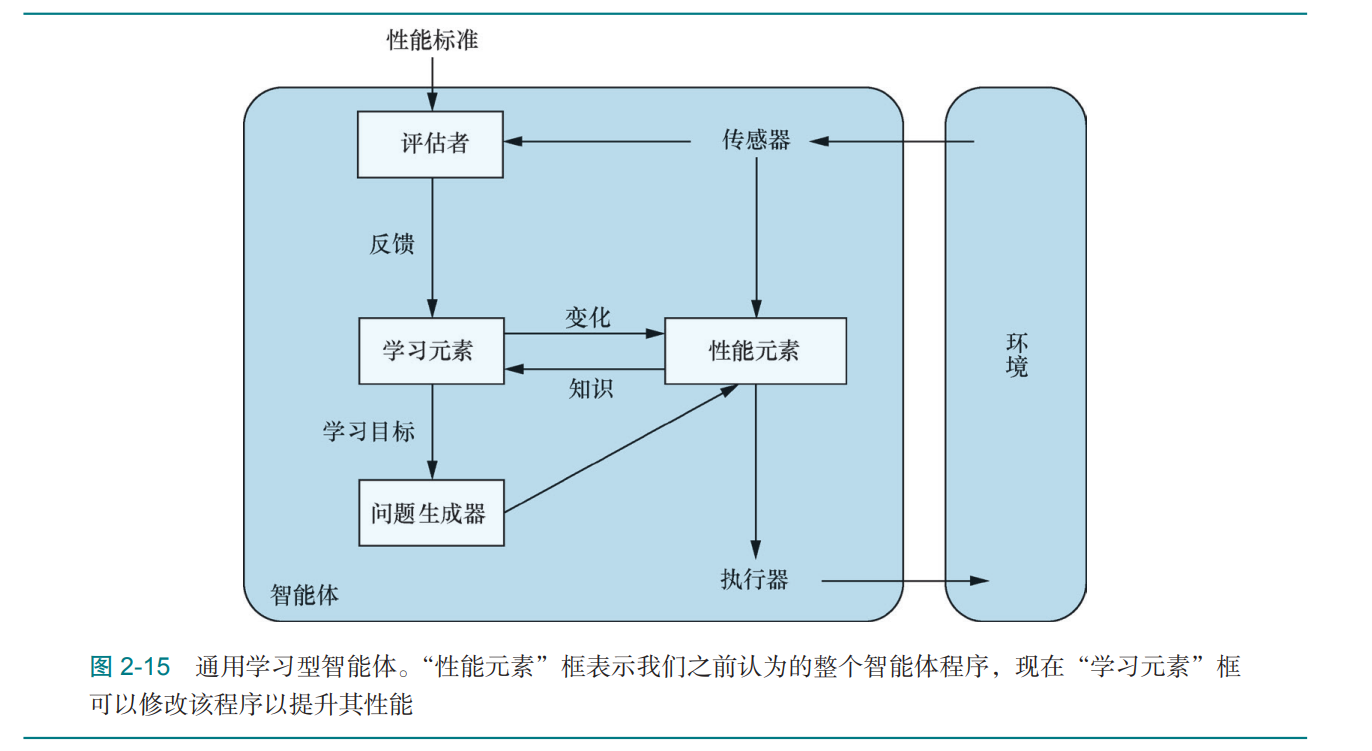
(6)学习型智能体
(7)智能体程序的组件如何运作及其表示?















 5693
5693











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









