






自适应波束形成
波束形成技术主要用于阵列信号处理中,其主要目的是使阵列天线方向图的主瓣指向所需信号的方向,使其零陷对准于干扰信号方向,尽可能地提高阵列输出所需信号的强度,同时尽可能减小干扰信号的强度和噪声的强度,从而提高阵列输出的信干噪比。
在一个综合系统的设计中,上层的算法需要与下层的硬件结构适配,才能够准确良好地方式运行。波束形成算法也需要考虑对应阵列阵元的空间分布。
为了方便推导,本文使用均匀线阵(ULA)作为空间阵列,在ULA上应用各种波束成形技术。ULA阵列输入信号的表达式由下文可知:
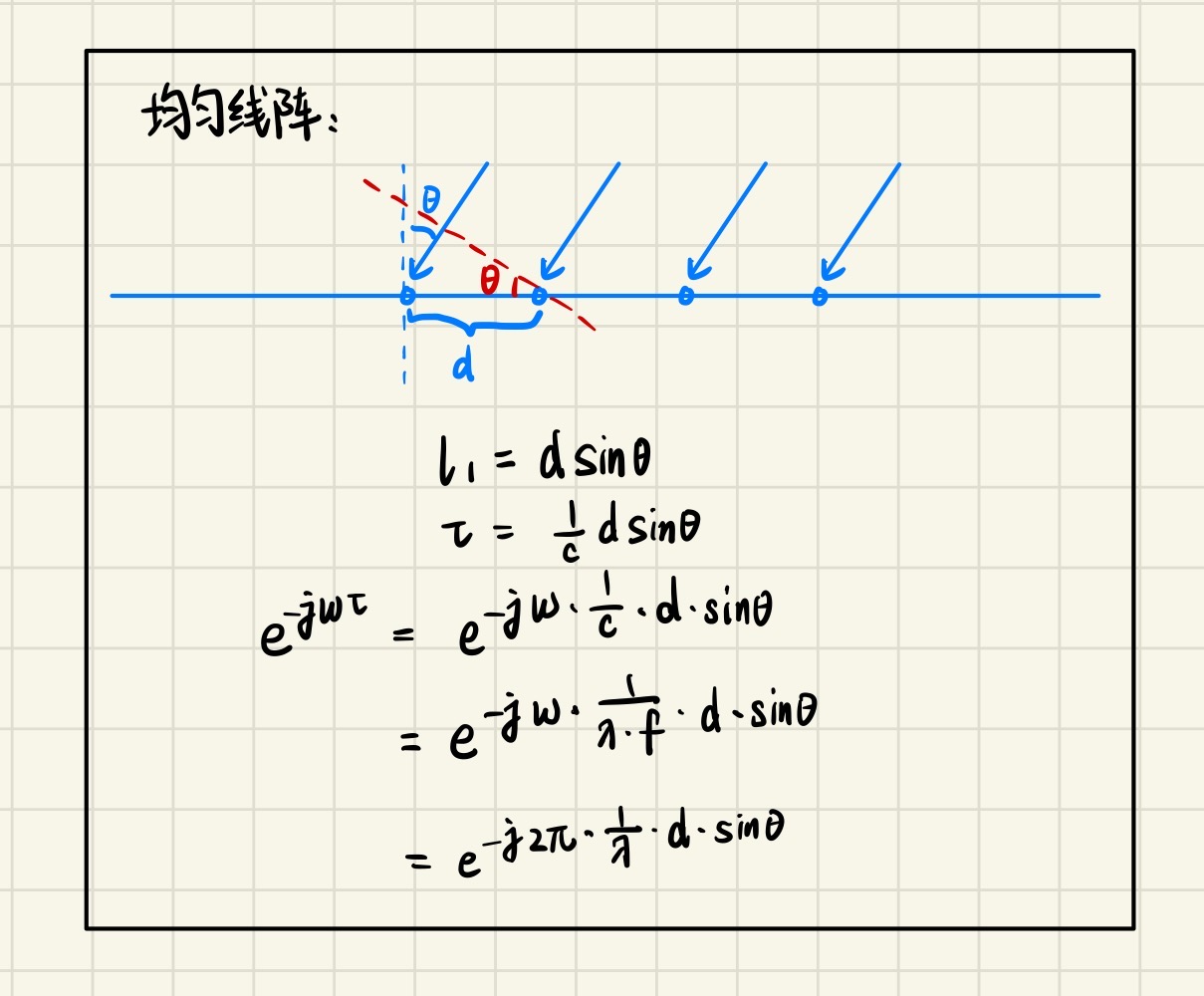
X d ( t ) = [ x 1 ( t ) x 2 ( t ) ⋯ x N ( t ) ] = s ( t ) [ 1 e j 2 π λ d sin θ d ⋯ e 2 π λ ( N − 1 ) d sin θ d ] = s ( t ) a ( θ d ) X_d(t)=\left[\begin{array}{l} x_1(t) \\ x_2(t) \\ \cdots \\ x_N(t) \end{array}\right]=s(t) \left[\begin{array}{l} 1 \\ e^{j \frac{2 \pi}{\lambda} d \sin \theta _d} \\ \cdots \\ e^{\frac{2 \pi}{\lambda}(N-1) d \sin \theta _d} \end{array}\right]=s(t) a(\theta _d) Xd(t)= x1(t)x2(t)⋯xN(t) =s(t) 1ejλ2πdsinθd⋯eλ2π(N−1)dsinθd =s(t)a(θd)
X ( t ) = s ( t ) a ( θ d ) + ∑ j = 1 n − 1 s j ( t ) a ( θ j ) + N ( t ) X(t) = s(t)a(\theta _d) + \sum_{j=1}^{n-1}s_j(t)a(\theta_j)+N(t) X(t)=s(t)a(θd)+j=1∑n−1sj(t)a(θj)+N(t)
根据输入的阵列信号的表达式,波束形成后的输出语音信号
y
(
t
)
y(t)
y(t)为阵列输入
M
M
M个通道经处理后的加权之和。下式中
w
w
w为波束形成器的权值向量。
y
(
t
)
=
∑
i
=
1
M
w
i
H
(
t
)
x
i
(
t
)
=
w
H
X
(
t
)
y(t)=\sum_{i=1}^M w_i^H(t) x_i(t)=w^H X(t)
y(t)=i=1∑MwiH(t)xi(t)=wHX(t)
下文中介绍一些常用的波束成形算法,包括其理论和代码仿真。
1. 固定波束成形
固定波束形成技术(Fixed Beamforming)仅仅针对目标方向的信号进行处理,当目标信号入射方向为
θ
d
\theta_d
θd时,阵列对应的导向矢量为
a
(
θ
d
)
a(\theta_d)
a(θd),若权值向量采用参数
w
=
a
(
θ
d
)
w=a(\theta_d)
w=a(θd),则对应信号的放大倍数取到最大:
y
(
t
)
=
a
H
(
θ
d
)
a
(
θ
d
)
s
(
t
)
=
M
s
(
t
)
y(t)=a^H(\theta_d)a(\theta_d)s(t)=Ms(t)
y(t)=aH(θd)a(θd)s(t)=Ms(t)
此时阵列接受到的各路信号加权相干叠加,是经典的固定波束成形算法。
- 优点:低计算复杂度,易于实现;在非相干噪声场环境下应用较多。
- 缺点:没有充分考虑噪声与干扰;在低信噪比,相干噪声场中效果不佳。
2. 最小方差无失真响应波束形成
1969 年,J. Capon 提出了最小方差无失真响应(Minimum Variance Distortionless Response, MVDR)波束形成算法。该算法是应用得最为广泛的自适应波束形成方法之一。
基本原理:调整波束形成器的权值向量,在对目标信号增益不变的情况下,让信号的输出功率降到最低,抑制其他方向的入射信号以及噪声干扰。最终将问题转化为条件极值的优化问题。为简单起见,先不考虑对干扰信号的约束,见下式:
{
m
i
n
x
w
H
R
w
w
H
a
(
θ
d
)
=
1
\left\{\begin{array}{l} \underset{x}{min}\,w^HRw\\ \\ w^Ha(\theta_d)=1 \end{array}\right.
⎩
⎨
⎧xminwHRwwHa(θd)=1
将
w
w
w作为优化问题的目标变量,运用拉格朗日乘数法和矩阵微商的知识,可以求得条件极值问题的最优解:
w
o
p
t
=
μ
R
−
1
a
(
θ
d
)
=
R
−
1
a
(
θ
d
)
a
H
(
θ
d
)
R
−
1
a
(
θ
d
)
w_{opt}= \mu R^{-1}a(\theta_d)=\frac{R^{-1}a(\theta_d)}{a^H(\theta_d)R^{-1}a(\theta_d)}
wopt=μR−1a(θd)=aH(θd)R−1a(θd)R−1a(θd)
因为在输入信号和增益不变的情况下,阵列输出中包含的目标信号的功率不会改变,即
w
H
R
d
w
w^HR_dw
wHRdw不变,在不考虑入射干扰的条件下,式中的
R
x
R_x
Rx可用
R
n
R_n
Rn代替,更方便考虑问题。
MVDR算法是理论上广泛使用的波束成形算法,但是因为该算法依赖于阵列信号的协方差矩阵,在实际应用中需要对协方差矩阵进行估计。在复杂情况下,若协方差矩阵计算存在一定偏差,算法性能会大幅度下降。目前衍生出一些基于对角加载的方法,但是复杂度较高。此外,该算法需要提前知道信号的波达方向,在实践中存在一定的困难。
本文针对不考虑干扰信号的MVDR算法,并设置一定的干扰信号测试该算法的抗干扰能力,编写代码code如下:
% Title: 最小方差无畸变响应波束形成器,MVDR
% Author: Xu Zhe
% Date: 2020-07-25
% Brief: 一维均匀线阵波束形成,MVDR波束形成器
% 系统初始化 Initialization
close all
clear
clc
% 参数 Parameters
M = 12; % 阵元数目
c = 3e8; % 光速
f = 10e9; % 频率
l = c/f; % 波长
d = l/2; % 阵元间隔 --关注
phi = [10,30]*pi/180; % 信号和干扰角度
Kt = 1; % 目标信号数目
snr = 20; % 信噪比
inr = 10; % 干噪比
Ac = 3601; % 角度采样数
% 计算阵元位置
R = d * (0:M-1)';
% 计算方向向量
K = length(phi); % 信号数目
A = zeros(M,K); % 初始化方向矩阵 Steering Matrix
for k = 1:K
for m = 1:M
A(m,k) = exp(1j * 2 * pi * R(m,1)* sin(phi(k))/l);
end
end
% 构造信号
Ts = 1024; % 快拍数
Kj = K - Kt; % 干扰信号数目
% 一个干扰信号,一个目标
s = zeros(K,Ts); % 信号
sd = zeros(1,Ts); % 期望信号
for k = 1:Kt
for i = 0:Ts-1
s(k,i+1) = sqrt(10^(snr/10)) * exp(1j * 2 * pi * f * i/(2*Ts));
end
sd = sd + s(k,:);
end
sd = sd/Kt;
if Kj ~= 0
for k = Kt+1:K
for i = 0:Ts-1
s(k,i+1) = sqrt(10^(inr/10)/2) * (randn(1) + 1j*randn(1)) * exp(1j * 2 * pi * f * i/(2*Ts));
end
end
end
% 噪声
n = (randn(M,Ts)+1j*randn(M,Ts))/sqrt(2);
% 接收数据向量
x = A * s+n;
% MVDR --对干扰方向操作了
J = A(:,Kt+1:K) * s(Kt+1:K,:);
Rnj = 1/Ts * (J*J'+n*n');
Rpriv = pinv(Rnj);
w = Rpriv*A(:,1)/(A(:,1)'*Rpriv*A(:,1));
% 方向图
theta = linspace(-pi,pi,Ac);
y = zeros(1,Ac);
for i = 1:Ac
a = exp(1j * 2 * pi * R(:,1)* sin(theta(i))/l);
y(i) = w' * a;
end
ydB = 20*log10(abs(y)/max(abs(y)));
% 绘图
figure('name','波束方向图','color',[1,1,1]);
set(gcf,'position',[458,342,290,200])
plot(theta * 180/pi,ydB,'color','b','linestyle','-','linewidth',1);
grid on
xlim([-90,90]);
ylim([-60,0]);
set(gca,'xtick',-90:30:90);
set(gca,'FontName','Times New Roman','FontSize',10.5);
xlabel('Direction of Arrival of the Signal (Degree)','FontSize',10.5);
ylabel('Magnitude Response (dB)','FontSize',10.5);
% 保存
% print('-depsc','E:\07 Latex\Paper Note\figures\MVDR_1.eps');
|

|

|

|
|
|
|
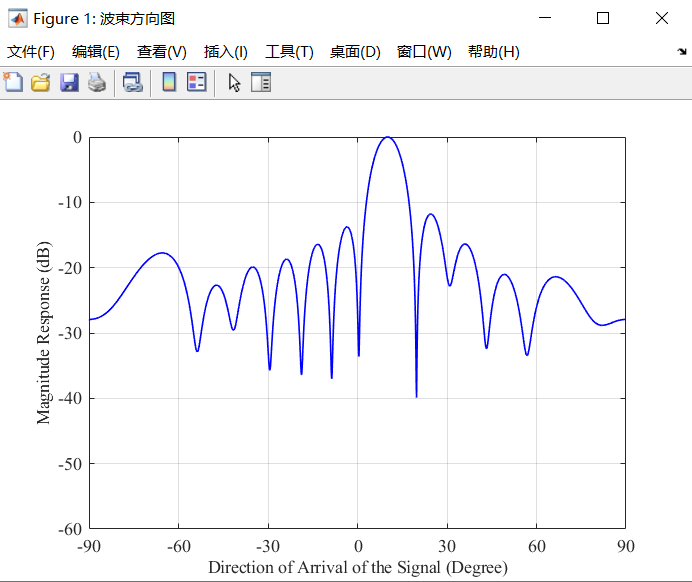
本文使用这组代码在多个实验设置下进行了多组实验,改变了快拍数,干扰信号强度,干扰信号数量以及使用干扰噪声功率 w H R n j w w^HR_{nj}w wHRnjw代替整体信号功率 w H R x w w^HR_{x}w wHRxw进行优化的方式,探究这些设置对实验结果的影响,实验结果如上图所示。
默认设置阵元为均匀线阵,包含12个阵元,阵元间距为半波长。信噪比为20dB,干噪比为10dB。设置入射目标信号方向为10°,干扰信号方向为30°。默认快拍数为1024。
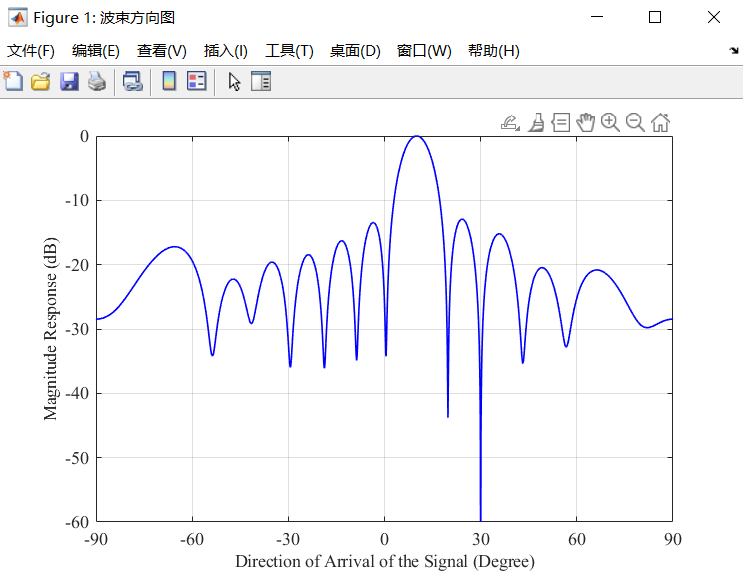
图一、图二是在默认设置下的两次实验,可以看到由于每个快拍的信号都存在一定的随机性,算法计算得到的信号统计特性也会存在一定偏差。导致在同样的实验场景下,算法方向图的增益也存在不同,但基本能够抑制入射的干扰信号。
图三、图四分别将快拍数下降到128,32。在低快拍数情况下算法对阵列的协方差矩阵计算的偏差更大。对应地,在实验结果中,算法对干扰信号方向的抑制明显减弱,并且在其他方向的抑制也在一定程度上下降。
图五在0°,30°两个方向施加干扰,并且将干噪比提升到30dB,可以发现算法对多个干扰入射的情况仍能良好地处理。并且在干扰的功率增大时,算法对其的抑制作用也会相应地增大,以最小化最终的输出功率。
图六使用干扰噪声功率 w H R n j w w^HR_{nj}w wHRnjw代替整体信号功率 w H R x w w^HR_{x}w wHRxw进行优化。通过实验可以发现,优化干扰噪声功率 w H R n j w w^HR_{nj}w wHRnjw时,在低快拍数,高干噪比的等诸多情况下能够取得更加良好且稳定的效果。
3.线性约束最小方差波束形成
在MVDR算法的基础上,假如考虑到对入射的干扰信号的约束,问题转化为多个约束条件下的优化问题,形成了LCVM算法,如下式所示:
min
w
w
H
R
w
s.t.
{
w
H
a
(
θ
d
)
=
1
w
H
a
(
θ
j
)
=
0
\begin{aligned} & \min _{w} w^{H}Rw \\ & \text { s.t. }\left\{\begin{array}{l} w^H a\left(\theta_{d}\right)=1 \\ w^H a\left(\theta_{j}\right)=0 \end{array}\right. \end{aligned}
wminwHRw s.t. {wHa(θd)=1wHa(θj)=0
通过矩阵形式表示,可以得到:
{
w
o
p
t
=
argmax
w
H
R
x
w
s.t.
C
H
w
=
f
\left\{\begin{array}{l} w_{opt}=\operatorname{argmax} w^HR_xw \\ \text{ s.t.\, }C^H w=f \end{array}\right.
{wopt=argmaxwHRxw s.t. CHw=f
式中
C
C
C为
M
×
P
M×P
M×P维的约束矩阵,
f
f
f为
P
×
1
P×1
P×1维的向量,并且约束方程组的个数需要少于阵元个数,以保证方程有解。同样通过矩阵微商和拉格朗日乘数法等方法,可以求解这个优化问题,解得:
w
L
C
M
T
=
R
x
−
1
C
(
C
H
R
x
−
1
C
)
−
1
f
w_{L C M T}=R_x^{-1} C\left(C^H R_x^{-1} C\right)^{-1} f
wLCMT=Rx−1C(CHRx−1C)−1f
LCMV算法是MVDR算法的拓展情况,同时,MVDR算法是LMCV算法在只考虑入射信号时的特例,当
C
=
a
(
θ
d
)
C=a(\theta_d)
C=a(θd)且
f
=
[
1
]
f=[1]
f=[1]时,
w
L
C
M
V
w_{LCMV}
wLCMV与
w
M
V
D
R
w_{MVDR}
wMVDR相等。
4.广义旁瓣相消器
为了避免约束性自适应算法,1982 年J. Griffiths 提出了广义旁瓣相消器(General sidelobe canceller,GSC)。
该算法通过两路处理信号,将输入信号分解到约束子空间和非约束子空间。约束子空间由约束条件形成,是由信号和干扰入射方向的导向矢量张成的子空间。当权值向量 w w w与某一导向矢量正交( w H a ( θ j ) = 0 w^Ha(\theta_j)=0 wHa(θj)=0)时,对应方向的信号无法对最终输出信号 y y y造成影响,该信号被抑制。同样地,可以对某个方向的信号进行一个抽取( w H a ( θ d ) = 1 w^Ha(\theta_d)=1 wHa(θd)=1)。
算法通过调整 w w w对应约束空间内的权重,对目标信号进行一个抽取,然后对干扰方向信号进行一个抑制。并且由于约束子空间和非约束子空间之间正交, w w w在约束子空间对应的权重对非约束子空间内的信号值没有影响。
在非约束子空间中,算法再次又变成了一个优化问题,通过改变非约束子空间对应 w w w的权值,最小化非约束子空间中输出功率的大小。
对于噪声而言,可以看作M维的随机变量,噪声的一部分投影到约束子空间,一部分投影到非约束子空间。约束子空间内的噪声相应地被抽取或抑制,而非约束子空间内的噪声根据其统计特性,在优化问题中最小化输出功率。

可以证明在纯延时条件下 GSC 是 LCMV 的一种等效实现结构,GSC 结构将 LCMV 的约束优化问题转化为了无约束的优化问题。其中GSC算法的权重可以表示为:
w
=
w
q
−
B
w
a
w=w_q-Bw_a
w=wq−Bwa
最终通过推导可得
w
q
=
(
C
C
H
)
−
1
C
f
w_q=\left(C C^H\right)^{-1} C f
wq=(CCH)−1Cf,
w
a
=
(
B
H
R
x
B
)
−
1
B
H
R
x
w
q
w_a=\left(B^H R_x B\right)^{-1} B^H R_x w_q
wa=(BHRxB)−1BHRxwq时,取到最优解。

















 807
807

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









