






计算机组成原理
在此备份
名词解释
计算机的主要性能指标、主存储器的主要技术指标
-
机器字长
指参与运算的数的基本位数
-
数据通路宽度
数据总线一次所能并行传递信息的位数
-
主存容量
一个主存储器所能存储的全部信息
-
运算速度
外频CPU内存与主板之间同步的时钟频率
计算机的运算速度和许多因素有关:如机器的主频、执行什么样的操作、主存速度等
-
存储带宽
指单位时间与组图交换的二进制信息量 常用单位B S表示
-
存储容量
在一个存储器中可以容纳的存储单元总数、存储空间的大小、字数、字节数。
-
存储速度
主存的存储速度 与存取时间、存取周期、主存带宽有关
-
可靠性
在规定的时间内 存储器无障碍读写的概率
-
功耗
反应了存储器件耗电的多少和其发热的程度
简答题(理解性记忆)
*冯诺依曼结构、原理
冯·诺依曼原理的核心是“存储程序控制”。
- 采用二进制形式表示数据和指令。
- 将程序(数据和指令序列)预先存放在主存储器中,使计算机在工作时能够自动高速地从存储器中取出指令,并加以执行。
- 由运算器、存储器、控制器、输入设备和输出设备5大基本部件组成计算机系统,并规定了这5大部件的基本功能。
冯·诺依曼思想实际上是电子计算机设计的基本思想,奠定了现代电子计算机的基本结构
四个时代
-
第1代:电子管数字机(1946-1958年)
计算机采用电子管作为基本器件,后期运用了磁芯存储器。主要用于科研和国防。
-
第2代:晶体管数字机(1958-1964年)
基本器件改用晶体管,运算速度提升,应用范围也进一步扩大到气象、工程、数据处理等科学领域
-
第3代:集成电路数字机(1964-1970年)
逻辑元件采用中、小规模集成电路(MSI、SSI),特点是速度更快而且可靠性有了显著提高,价格进一步下降,产品走向了通用化、系列化和标准化等。应用领域开始进入文字处理和图形图像处理领域。
-
第4代:大规模集成电路机(1970年至今)
逻辑元件采用了大规模和超大规模集成电路。并不断向大容量、高集成度、高速度方向发展,开创了微型计算机的新时代。应用领域逐步走向所有行业。
存储系统层次结构[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-3lcoCAwQ-1640658862491)(C:\Users\ha\AppData\Roaming\Typora\typora-user-images\image-20211227132058653.png)]
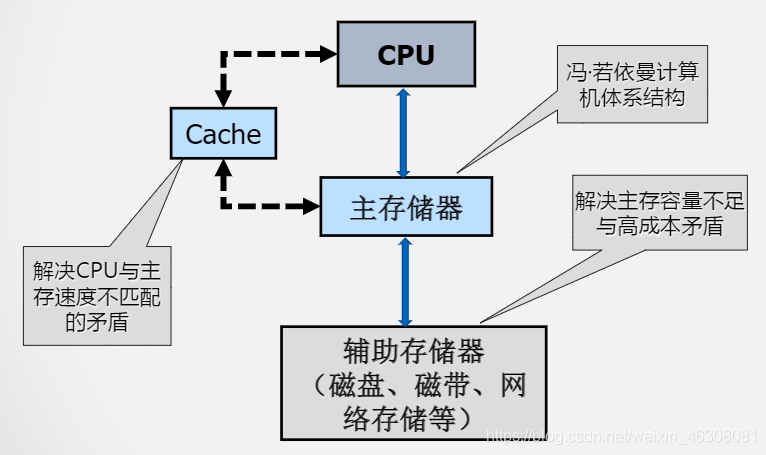
(1)cache : 高速缓冲存储器,容量小,速度快,与CPU中的寄存器通过字进行信息交换。
(2)主存 :内存,与cache通过块进行信息交换。
(3)辅助存储器 :主要是磁盘,容积大、价格低、速度慢,与主存通过页面进行信息交换。
局部性原理
(1)时间局部性
现在访问的信息再不久的将来还要被再次访问。
类似于程序结构中的:循环结构
(2)空间局部性
现在访问了信息,下次更可能访问它周围的信息。
类似于程序结构中的:顺序结构
引入存储系统的的目的:为了解决存储量,存取速度和价格之间的矛盾。
Cache存储系统:为了解决主存速度不足而提出来的,位于主存和CPU之间,用于存储正在执行的程序段和数据,但容量小价格高。
虚拟存储系统:是为解决主存容量不足而提出来的
半导体随机存储器
1.结构
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-8Ggz7DjU-1640658862493)(C:\Users\ha\AppData\Roaming\Typora\typora-user-images\image-20211227132232616.png)]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Cset8qJL-1640658862493)(C:\Users\ha\AppData\Roaming\Typora\typora-user-images\image-20211227132245101.png)]
2.译码驱动方式
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-n3anFviI-1640658862494)(C:\Users\ha\AppData\Roaming\Typora\typora-user-images\image-20211227132342945.png)]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-a6uELyWw-1640658862494)(C:\Users\ha\AppData\Roaming\Typora\typora-user-images\image-20211227132401509.png)]
静态RAM 动态RAM
1、静态RAM,指SRAM:只要有供电,它保存的数据就不会丢失,且为高速存储器,如CPU中的高速缓存(cache)
2、动态RAM,指DRAM:有供电,还要根据它要求的刷新时间参数,才能保持存储的数据不丢失,如电脑中的内存条
静态RAM的优点:速度快,数据不易丢失,控制简单
动态 RAM的优点:存储密度高
二者区别:
-
DRAM采用电容存储,而SRAM采用双稳态触发器
-
DRAM较便宜,SRAM较贵
-
DRAM需要刷新,SRAM不需要
-
DRAM速度慢,SRAM速度快
-
DRAM常用作主存,SRAM常作寄存器(如Cache)
-
DRAM集成度高,SRAM集成度低
-
DRAM功耗小,SRAM功耗高
*刷新
为什么刷新
- 为了维持DRAM记忆单元的存储信息
刷新的概念
- 刷新是指每隔一段时间向栅级电容补充一次电荷的过程。
刷新方式:(3种
集中刷新:有死区
优点:读写操作不受刷新影响、存取速度高
缺点:刷新期间不能读写,死区较长
分散刷新:(无死区)
优点:无死区
缺点:存取周期长、整机速度降低、刷新频繁
异步刷新(有死区)
优点:刷新次数减少、死区小
缺点:控制复杂、实现困难
刷新时间=存储矩阵行数*刷新周期
DDR3 SDRAM
DDR3 SDKAM 可以看作是 DDR2的改进版,DDR2的预取设计位数是4位,即 DRAM内核的频率只有接口频率的1/4, 而DDR3的预取设计位数提升至8位,其 DRAM内核的频率达到了接口频率的1/8
高速缓冲寄存器
高速缓冲存储器是存在于主存与CPU之间的一级存储器, 由静态存储芯片(SRAM)组成,容量比较小但速度比主存高得多, 接近于CPU的速度。在计算机存储系统的层次结构中,是介于中央处理器和主存储器之间的高速小容量存储器。它和主存储器一起构成一级的存储器。高速缓冲存储器和主存储器之间信息的调度和传送是由硬件自动进行的。
高速缓冲存储器最重要的技术指标是它的命中率。
地址寄存器
AR .用来保存当前CPU所访问的内存单元的地址。由于在内存和CPU之间存在着操作速度上的差别,所以必须使用地址寄存器来保持地址信息,直到内存的读/写操作完成为止 。
*中央处理器的功能和组成
主要功能
解释计算机指令以及处理计算机软件中的数据。 CPU是计算机中负责读取指令,执行指令的核心部件。
组成
中央处理器是由运算器、控制器和寄存器组成。
1、运算器
运算器也称算数逻辑单元(arithmetic and logic unit,daoALU),是进行算数运算和逻辑运算的部件,在控制器的控制下,对取自内存储器的数据进行算术运算或逻辑运算,并将运算的结果送到内存储器。
2、控制器
控制器的功能是控制、指挥计算机各部件的工作,并对输入输出设备进行监控,使计算机自动地执行程序。
3、寄存器
寄存器(register)是CPU内部用来存放数据的一些小型的存储区域,用来暂时存放参与运算的数据以及运算结果。
时序系统
指令周期
机器周期
节拍
总线概览、分类
总线是一组能为多个部件服务的公共信息传送线路,它能分时地发送与接收各部件的信息。
分类:
1.按功能层次分类:
-
片内总线
是芯片内部的总线,它是CPU芯片内部寄存器和寄存器、寄存器于ALU之间的公共连接线
-
系统总线
是计算机系统内各功能部件之间相互连接的总线
-
通信总线
用于计算机系统之间与其他系统信息传递的总线
2.按数据线分类
-
并行总线
含有多条双向数据线
-
串行总线
含一条双向数据线或两条单向数据线
计算部分
真值(反码、补码、原码)
补码的溢出判断与检测方法(3种)
定点乘法运算规则
补码一位乘法
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-6NP9BoXn-1640658862495)(C:\Users\ha\AppData\Roaming\Typora\typora-user-images\image-20211227171817115.png)]
浮点数的加减运算
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Scb79hT9-1640658862495)(C:\Users\ha\AppData\Roaming\Typora\typora-user-images\image-20211227160513630.png)]
存储芯片容量的计算
机器数的转化
IEEE 754标准浮点数
汉明校验码
发送信息(2-4位) 用3位校验位
发送信息(5-11位)用4位校验位
数据寻址 基本数据的寻址方式
寻址的十种方法(地址码意义,操作数存放在哪里,是否访存,访存几次?应用?)p56
-
立即寻址:不访问内存,操作数在指令内。
- 优点:执行时间最短,缺点:立即数范围受限、灵活性差
-
直接寻址:执行阶段访问一次内存
- 缺点:直接地址位数决定了操作数的寻址范围,操作数地址不易修改
- 优点:简单,不需要专门计算操作数的地址
-
间接寻址:
- 优点:便于编制程序、可扩大寻址范围
- 缺点:执行阶段多次访存
-
寄存器直接寻址:
- 优点:指令执行阶段不访存,只访问寄存器、执行速度快、可缩短指令字长。
- 缺点:寄存器个数有限,寄存器价格昂贵。
-
寄存器间接寻址:有效地址在寄存器中,操作数在存储器中,执行阶段访存
- 优点:便于编写循环程序、执行速度比间接寻址快
-
偏移寻址
-
相对寻址
-
变址寻址
-
堆栈寻址
基础知识
一个字节=8bit
定点小数(fractional fixed point) :
定点数是指小数点位置固定不变的数,并且只允许固定在数的开头或者数的末尾。
定点小数是指小数点位置固定在数的开头的数。它只能表示纯小数。
定点小数的表示范围:
定点小数可以表示的数值最大为+0.11…11,最小为一0.11.11,即它所能表示的数的范围为:
-(1-2一m) ≤N≤(1-2-m)
定点小数主要用于早期的定点机中,节省硬件:但是使用它计算很不方便。
定点数的缺点:
-
编程困难;小数点的对齐和计算之后的恢复结果由人力来做。
-
表示数的范围小;
-
数据存储单元的利用率往往很低。必须把所有参与运算的数据都除以这些数据中的最大数,只有这样才能把所有数据都化成纯小数,因此会造成很多数据有大量的前置零,从而浪费了许多数据存储单元。
-
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-XqzSzIJW-1640658862496)(C:\Users\ha\AppData\Roaming\Typora\typora-user-images\image-20211224185029474.png)]
十进制D、二进制B、八进制O、十六进制H的相互转化
二进制数转换成八进制、十六进制数:
二进制数转换成八进制、十六进制数,首先从小数点开始,分别向左(整数部分)或者向右(小数部分)对每三个二进制位或四个二进制位进行分组,每一组对应一个八进制位或者十六进制位。如果位数不是三或四的整数倍,那么分别在左边(整数部分)或者右边(小数部分)补零。
例:1100111.10101101B =001'100'111.101'011'010B =147.5320=0110'0111.1010'1101B=67.ADH八进制、十六进制数转换成二进制数:
八进制、十六进制数转换成二进制数很简单,只要把每一位转换成对应的三位或者四位二进制数,依次写出来就是了。
例:437.560=100'011'111.101'110B =100011111.10111B 例:3E8.AH=0011'1110'1000.1010B =1111101000.101B八进制数与十六进制数之间的转换只需要使用二进制数做桥梁就可以很容易完成。
十进制数转换成二进制数
- 除2取余法
- 比如138,它在128和256之间,那么就将它减去128,得到10,而128这个权值对应的位是第8位,所以转换成的二进制数应该是1XXXXXXX,10在16和8之间,减去8得到2,8对应第4位,于是二进制数为10001XXX,而2对应第2位,所以二进制数为100010010。
出来就是了。
例:437.560=100'011'111.101'110B =100011111.10111B 例:3E8.AH=0011'1110'1000.1010B =1111101000.101B八进制数与十六进制数之间的转换只需要使用二进制数做桥梁就可以很容易完成。
十进制数转换成二进制数
- 除2取余法
- 比如138,它在128和256之间,那么就将它减去128,得到10,而128这个权值对应的位是第8位,所以转换成的二进制数应该是1XXXXXXX,10在16和8之间,减去8得到2,8对应第4位,于是二进制数为10001XXX,而2对应第2位,所以二进制数为100010010。















 206
206











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









