







基于51单片机老人防跌倒经纬度GPS定位短信GSM短信设计
0、毕业设计选题原则说明(重点)
- 选题之前,同学们要弄明白一件事情,做毕业设计是干什么用的!
- 这里我告诉大家,毕业设计对于你来说,不是让你去搞研究,掌握运用所学知识的,也不是让你去比谁做的毕业设计多么牛逼,多么厉害。
- 说白点,它的作用就是一个,让你顺利毕业,能够拿到学位证,毕业证而已!!!
- 当你明白这一点后,作毕业设计的要求就是在满足老师的要求后,越简单越好,这样不但容易去做,而且你自己也容易去理解,掌握,同样也能花最少的钱!!!
- 满足老师的要求,这个没办法,毕竟他是决定你是否能通过答辩的人。
- 每年都有很多同学找到我的时候,后悔当初为什么要把功能写的那么复杂,后悔没有提前找我咨询一下!所以在这里提醒同学们,提交开题报告之前一定要多想想,咨询下以往的学长学姐,不要自己随便写一堆提交上去!!!
- 大家找不到学长学姐的话,也可以找我咨询,我可以给大家一些建议。
- 点击此处即可咨询
1、项目简介
1.1 系统构成
本设计由STC89C52单片机电路+ADXL345加速度传感器电路+按键电路+蜂鸣器报警电路+ LED灯电路+GSM模块电路+电源电路组成。
1.2 系统功能
- 1、板子正常情况下是竖直装在口袋里的(adxl345模块在下角竖直立着),一旦倾角传感器检测到平放即摔倒,蜂鸣器报警,且摔倒的时间持续超过15秒短信上报(15秒是为了确定老人已经跌倒且15秒钟都没有自行爬起来,需要报警提醒周围的人帮忙)。如果老人没有跌倒,而是弯腰等等,这属于误报警,则老人可以自己用按键取消键取消警报。触发GSM模块实现短信报警, 发送给指定人员,包括所在位置经纬度信息。
- 2、短信处理及初始化有状态指示灯指示。
- 3、短信处理过程有指示灯显示。
- 4、GSM模块是SIM800A,该模块和SIM900A电路程序完全兼容外观外形一模一样。
- 5、GPS模块使用的中科微电子的模块,该模块可以实时定位位置信息。
2、部分电路设计
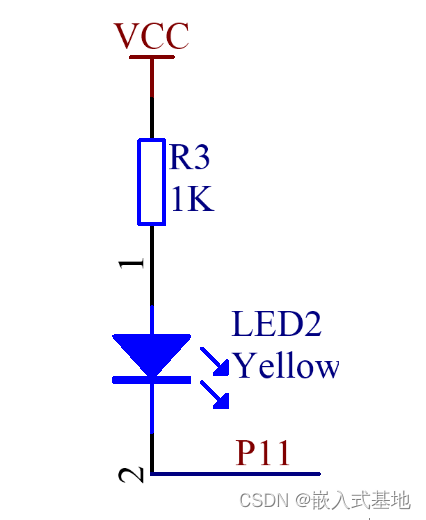
2.1 LED信号指示灯电路设计
LED灯即发光二极管,它是半导体二极管的一种,可以把电能转化成光能。发光二极管与普通二极管一样是由一个PN结组成,也具有单向导电性。在电路中,电阻的作用是限流,保护LED灯。只要单片机的控制引脚拉低,则LED灯亮,否则,LED灯不亮。
其具体电路原理图如下图所示:
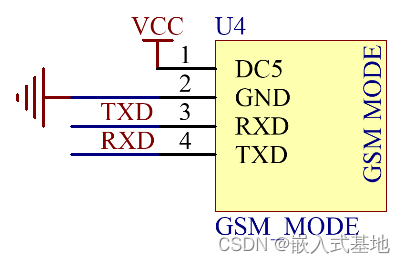
2.2 GSM SIM800A模块电路设计
GSM模块,是将GSM射频芯片、基带处理芯片、存储器、功放器件等集成在一块线路板上,具有独立的操作系统、GSM射频处理、基带处理并提供标准接口的功能模块。GSM模块具有发送SMS短信,语音通话,GPRS数据传输等基于GSM网络进行通信的所有基本功能。简单来讲,GSM模块加上键盘、显示屏和电池,就是一部手机。
模块接口原理图如下图所示:
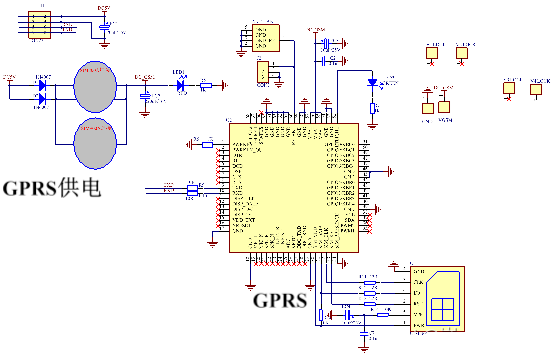
模块内部具体原理图如下图所示:
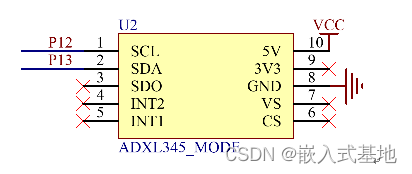
2.3 ADXL345倾角传感器模块电路设计
本设计选择倾角传感器ADXL345模块实时检测相关的状态信息。ADXL345是一款小而薄的超低功耗3轴加速度计,分辨率高(13位),测量范围达± 16g。数字输出数据为16位二进制补码格式,可通过SPI(3线或4线)或I2C数字接口访问。
ADXL345模块接口图如下图所示:
2.4 GPS模块电路设计
本系统使用的GPS模块均具有高灵敏度、低功耗、小型化、其极高追踪灵敏度大大扩大了其定位的 覆盖面, 在普通GPS 接收模块不能定位的地方, 如狭窄都市天空下、密集的丛林环境, 本系统模块都能高精度定位。模块的高灵敏度、小静态漂移、低功耗及轻巧的体积,适用于车载、手持设备如 PDA,车辆监控、手机、摄像机及其他移动定位系统的应用,是GPS产品应用的最佳选择。
模块接口原理图如下图所示:

3、部分代码展示
3.1 定时0初始化
void Timer0_isr(void) interrupt 1
{
TH0=(65536-20000)/256; //重新赋值 20ms
TL0=(65536-20000)%256;
time_20ms++;
if(time_20ms%10==0) //定时读取adxl345数据
{
ReadAdxl345=TRUE;
}
if(time_20ms%50==0) //延时定时上报
{
ReportLater++;
keyLater++; //按键延时上报计数
dealGpsMes++;
}
}
3.1 ADXL345初始化
void Init_ADXL345()
{
Single_Write_ADXL345(0x31,0x0B); //测量范围,正负16g,13位模式
Single_Write_ADXL345(0x2C,0x08); //速率设定为12.5 参考pdf13页
Single_Write_ADXL345(0x2D,0x08); //选择电源模式 参考pdf24页
Single_Write_ADXL345(0x2E,0x80); //使能 DATA_READY 中断
Single_Write_ADXL345(0x1E,0x00); //X 偏移量 根据测试传感器的状态写入pdf29页
Single_Write_ADXL345(0x1F,0x00); //Y 偏移量 根据测试传感器的状态写入pdf29页
Single_Write_ADXL345(0x20,0x05); //Z 偏移量 根据测试传感器的状态写入pdf29页
}















 1324
1324











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











