







 本文详细介绍了红外遥控的基本原理,包括发射设备和接收设备的工作方式,并展示了程序设计过程。同时,文章还探讨了PWM技术的应用,通过定时器配置实现了占空比控制,用于电机控制。
本文详细介绍了红外遥控的基本原理,包括发射设备和接收设备的工作方式,并展示了程序设计过程。同时,文章还探讨了PWM技术的应用,通过定时器配置实现了占空比控制,用于电机控制。
1、基本原理
红外遥控肯定是通过红外线来实现的,可见光的波长从长到短进行划分,红光的波长是最长的,红外线就是波长比红光的波长还要长一点的光线了,那么顾名思义,波长比紫光波长还要短的光线自然就是紫外线了,红外遥控就是通过红外线来进行数据传输的。
1、发射设备
红外遥控由发射部分还有接收部分组成,这个部分详见普中教程吧,我也不是很专业,下面是关于红外发射装置的说明:
实际用的就是我们的遥控器

通常红外遥控为了提高抗干扰性能和降低电源消耗, 红外遥控器常用载波的方式传送二进制编码,常用的载波频率为 38kHz, 这是由发射端所使用的 455kHz晶振来决定的。 在发射端要对晶振进行整数分频,分频系数一般取 12,所以455kHz÷12≈37.9kHz≈38kHz。 也有一些遥控系统采用 36kHz、 40 kHz、 56 kHz等,一般由发射端晶振的振荡频率来决定。 所以,通常的红外遥控器是将遥控信号(二进制脉冲码)调制在 38KHz 的载波上,经缓冲放大后送至红外发光二极管,转化为红外信号发射出去的。
那么这个二进制码脉冲又是啥呢?
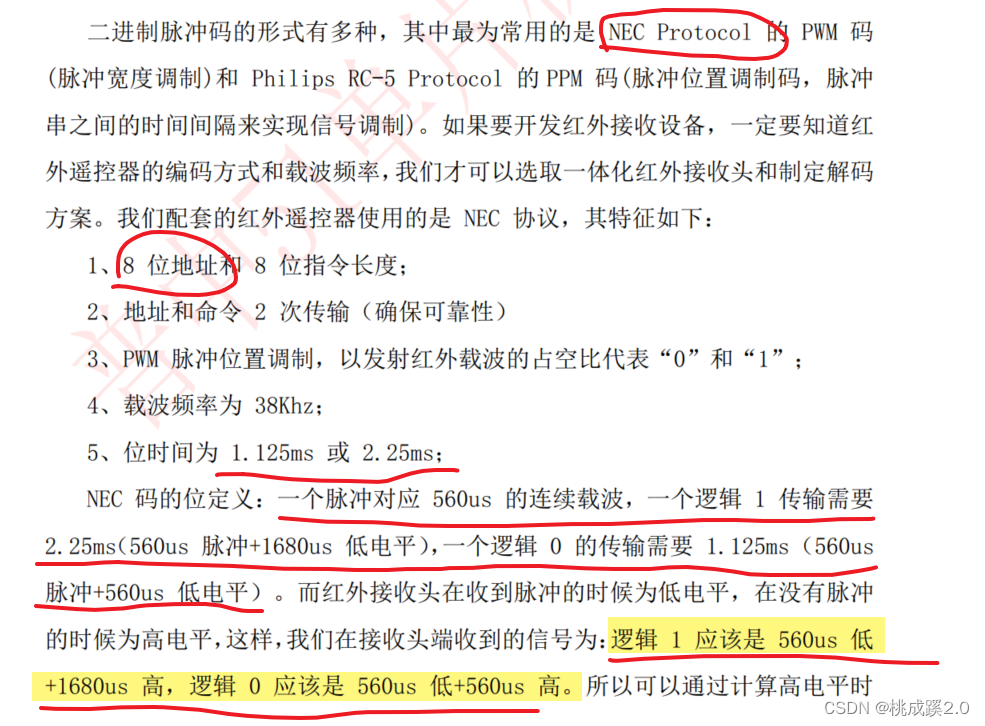
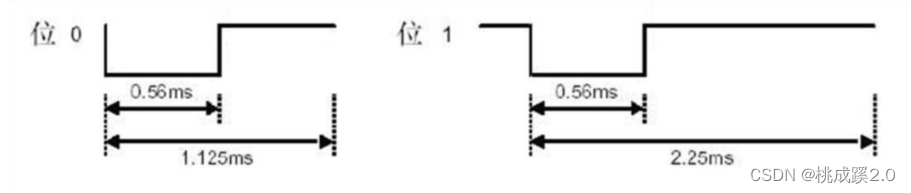
0和1的表述如下所示:
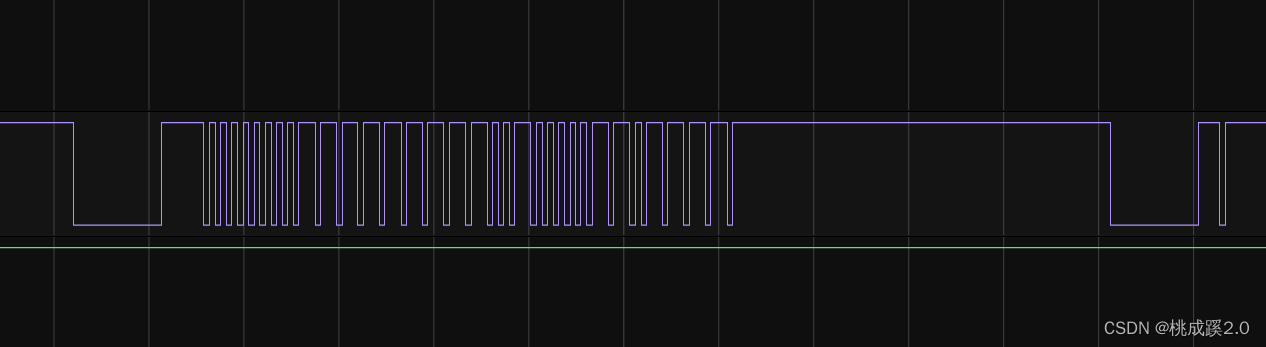
整段数据瑞安所示:

这里我截取了一段红外信号如图所示:
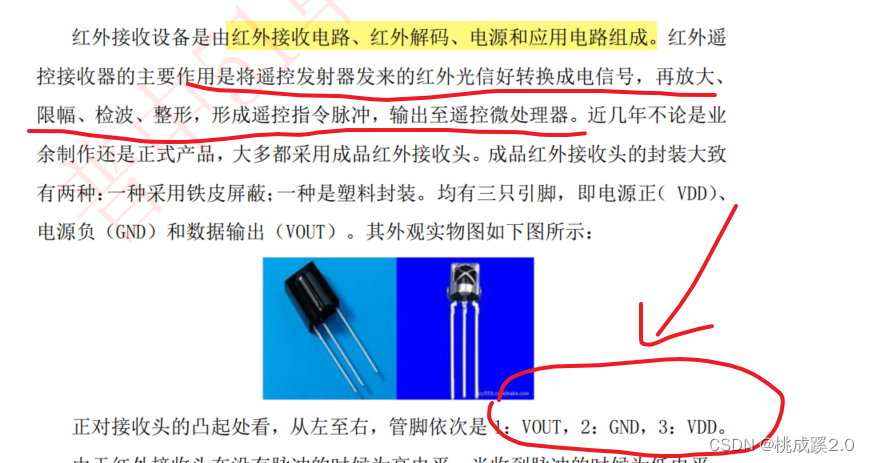
2、接收设备
接收设备说明如下:
3、程序部分
下面进行接收部分软件设计:
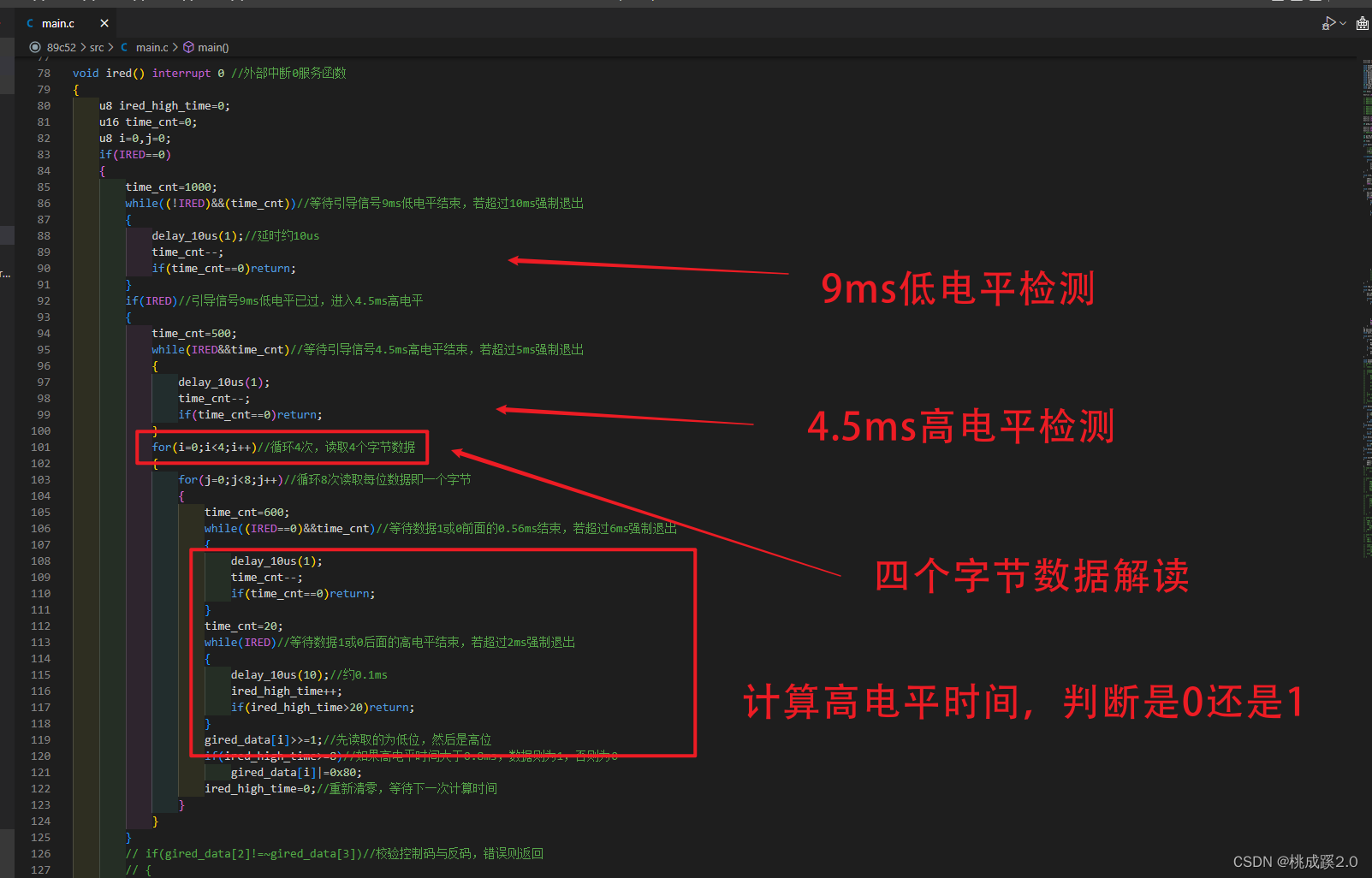
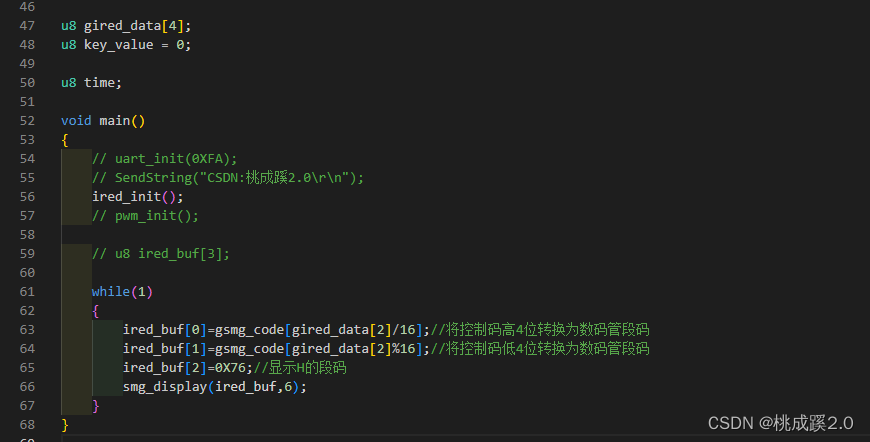
加入数码管显示接受的nec码
这里实测加了校验读不出了,给他注释掉
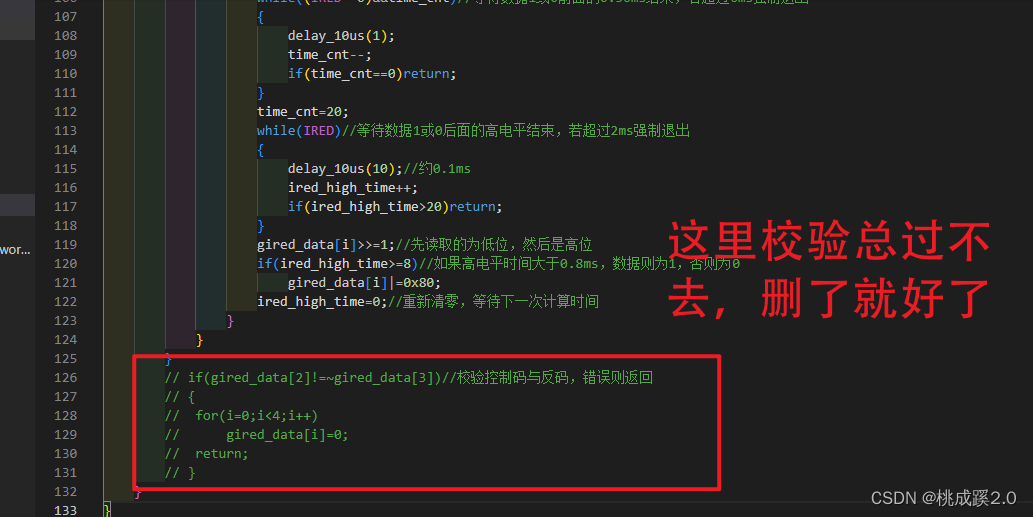
源码如下:
void ired_init(void)
{
IT0=1; //下降沿触发
EX0=1; //打开中断0允许
EA=1; //打开总中断
IRED=1; //初始化端口
}
void ired() interrupt 0 //外部中断0服务函数
{
u8 ired_high_time=0;
u16 time_cnt=0;
u8 i=0,j=0;
if(IRED==0)
{
time_cnt=1000;
while((!IRED)&&(time_cnt))//等待引导信号9ms低电平结束,若超过10ms强制退出
{
delay_10us(1);//延时约10us
time_cnt--;
if(time_cnt==0)return;
}
if(IRED)//引导信号9ms低电平已过,进入4.5ms高电平
{
time_cnt=500;
while(IRED&&time_cnt)//等待引导信号4.5ms高电平结束,若超过5ms强制退出
{
delay_10us(1);
time_cnt--;
if(time_cnt==0)return;
}
for(i=0;i<4;i++)//循环4次,读取4个字节数据
{
for(j=0;j<8;j++)//循环8次读取每位数据即一个字节
{
time_cnt=600;
while((IRED==0)&&time_cnt)//等待数据1或0前面的0.56ms结束,若超过6ms强制退出
{
delay_10us(1);
time_cnt--;
if(time_cnt==0)return;
}
time_cnt=20;
while(IRED)//等待数据1或0后面的高电平结束,若超过2ms强制退出
{
delay_10us(10);//约0.1ms
ired_high_time++;
if(ired_high_time>20)return;
}
gired_data[i]>>=1;//先读取的为低位,然后是高位
if(ired_high_time>=8)//如果高电平时间大于0.8ms,数据则为1,否则为0
gired_data[i]|=0x80;
ired_high_time=0;//重新清零,等待下一次计算时间
}
}
}
// if(gired_data[2]!=~gired_data[3])//校验控制码与反码,错误则返回
// {
// for(i=0;i<4;i++)
// gired_data[i]=0;
// return;
// }
}
}
最终效果如下:
2、PWM实验
pwm是一些电机控制的常客了,正好前文介绍过定时器,这里顺便记录下:
首先是定时器定时时间的设定:(这里只要看下工作模式还有两个初值就行了,其他的参数没用)
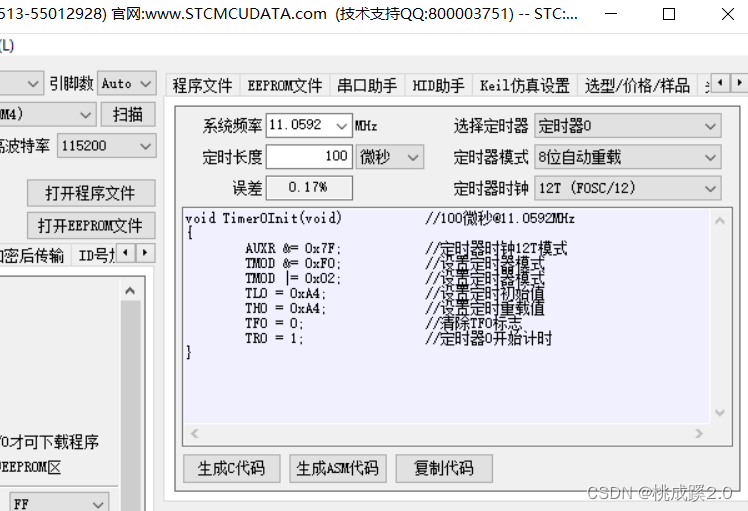
同样要注意这里的采用11.0592hz的话是有误差的,这个是不可避免的!,最后的定时器配置代码如下:
源码如下:
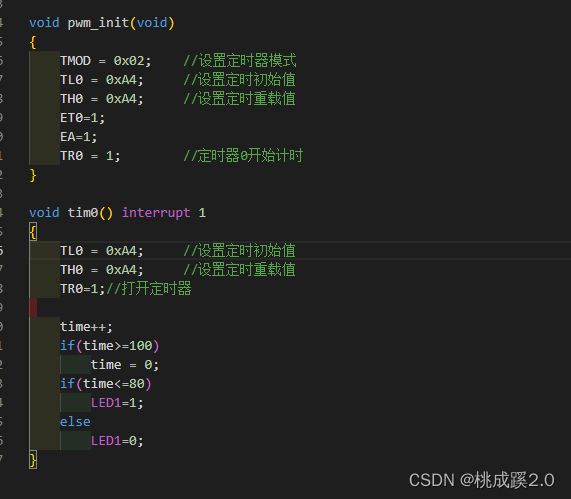
void pwm_init(void)
{
TMOD = 0x02; //设置定时器模式
TL0 = 0xA4; //设置定时初始值
TH0 = 0xA4; //设置定时重载值
ET0=1;
EA=1;
TR0 = 1; //定时器0开始计时
}
void tim0() interrupt 1
{
TL0 = 0xA4; //设置定时初始值
TH0 = 0xA4; //设置定时重载值
TR0=1;//打开定时器
time++;
if(time>=100)
time = 0;
if(time<=80)
LED1=1;
else
LED1=0;
}
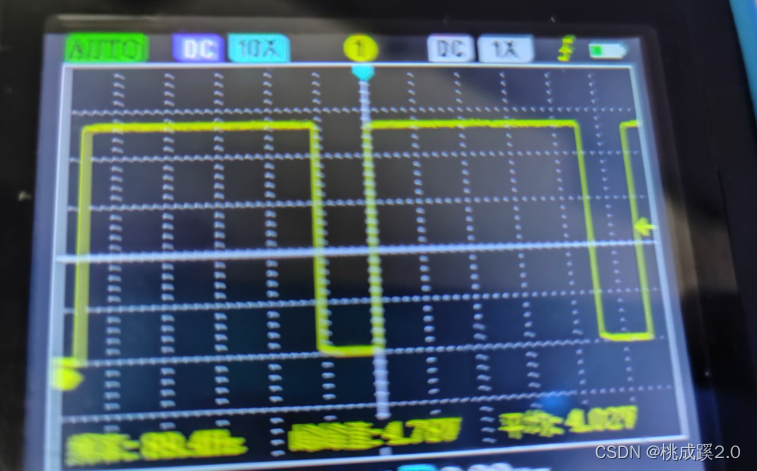
这里就是设定一个100的周期,这里定时器一次是100us,100个周期就是10ms,就是100hz,实测只有89hz,可以看出误差,然后在0-80输出高,其他的输出低,那么占空比就是80%,如下所示:


















 537
537

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











