






PID控制器介绍
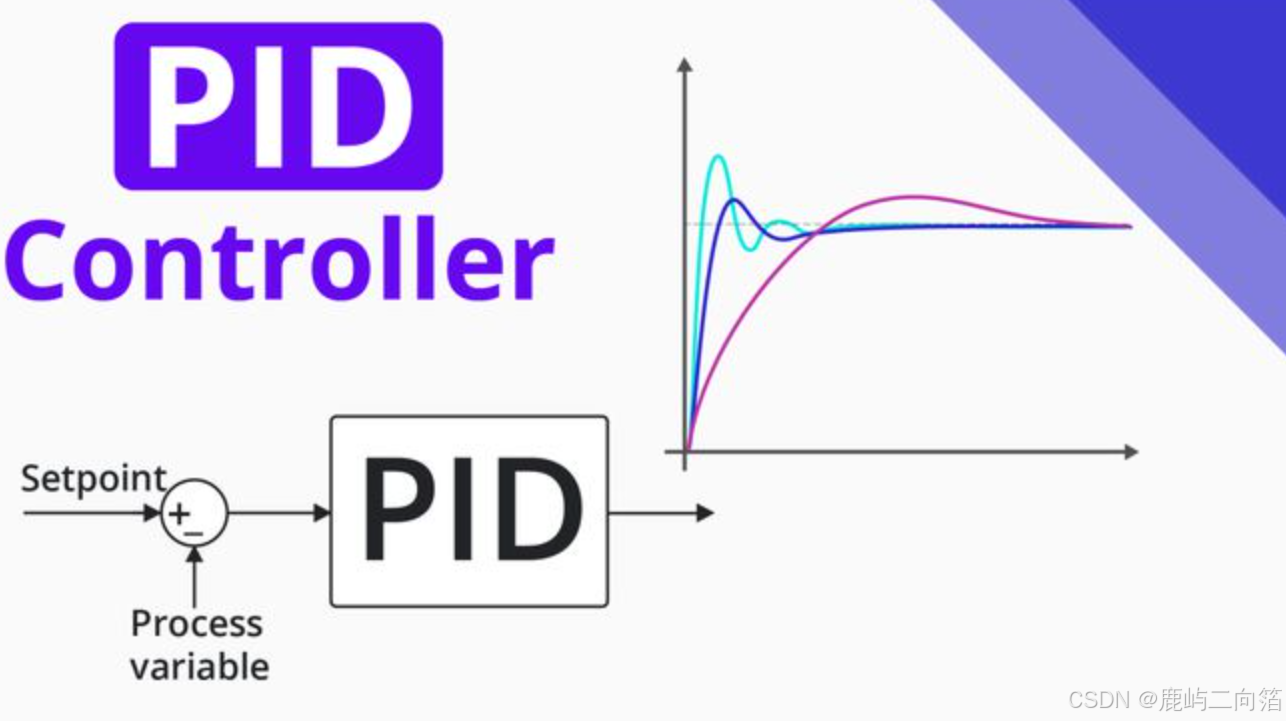
PID控制器(比例-积分-微分控制器)是一种广泛应用于工业控制系统的反馈控制算法,通过实时调整控制输出来使过程变量(PV)跟踪设定值(SP)。其核心是通过误差信号(SP与PV的差值)的比例、积分和微分三个环节的综合作用,实现快速响应、消除稳态误差和抑制振荡。
-
比例环节(P)
- 作用:根据当前误差的大小线性调整输出,快速响应变化。
- 参数:比例增益 ( K_p )。( K_p ) 越大,响应越快,但过大可能导致超调或振荡。
-
积分环节(I)
- 作用:累积历史误差,消除稳态误差(如系统持续偏离设定值的问题)。
- 参数:积分时间 ( T_i )(或积分增益 ( K_i = K_p / T_i ))。积分时间过小会导致积分作用过强,引发振荡。
-
微分环节(D)
- 作用:预测误差变化趋势,抑制超调和振荡,提高系统稳定性。
- 参数:微分时间 ( T_d )(或微分增益 ( K_d = K_p \cdot T_d ))。微分时间过长可能放大噪声干扰。
PID参数整定类型
参数整定是调整 ( K_p )、( T_i )、( T_d ) 以使系统达到最佳性能(如快速性、稳定性)的过程。常用方法包括:
1. 手动试凑法
- 步骤:
- 关闭积分和微分(( T_i = \infty ), ( T_d = 0 )),逐渐增大 ( K_p ) 直至系统出现等幅振荡。
- 适当减小 ( K_p ),加入积分环节消除稳态误差。
- 最后加入微分环节抑制超调。
- 适用场景:简单系统或经验丰富的工程师快速调整。
2. Ziegler-Nichols方法
- 临界比例度法(闭环法):
- 关闭积分和微分,逐渐增大 ( K_p ) 直至系统等幅振荡,记录临界增益 ( K_c ) 和振荡周期 ( T_c )。
- 按公式计算参数:
- P控制器:( K_p = 0.5K_c )
- PI控制器:( K_p = 0.45K_c ), ( T_i = 0.83T_c )
- PID控制器:( K_p = 0.6K_c ), ( T_i = 0.5T_c ), ( T_d = 0.125T_c )
- 阶跃响应法(开环法):
- 对系统施加阶跃输入,通过响应曲线获取延迟时间 ( L ) 和时间常数 ( T )。
- 按公式计算参数(例如PID:( K_p = 1.2T/L ), ( T_i = 2L ), ( T_d = 0.5L ))。
- 适用场景:无模型且允许系统短时振荡的场景。
3. Cohen-Coon方法
-
基于一阶加滞后模型,通过阶跃响应获取参数 ( K )、( T )、( \tau )。
-
公式示例(PID):
![[
K_p = \frac{1.35T}{K\tau} \left(1 + \frac{0.18\tau}{T}\right), \quad T_i = \frac{2.5\tau(1 + 0.39\tau/T)}{1 + 0.81\tau/T}, \quad T_d = 0.37\tau
]](https://i-blog.csdnimg.cn/direct/1d423a1fb1e844f5b8cdaa8a4af6c55b.png)
-
适用场景:适用于具有显著延迟的一阶系统。
4. 软件自动整定
- 控制器内置算法(如继电器反馈、模式识别)自动施加扰动并分析响应,计算最优参数。
- 优点:无需人工干预,适合复杂系统。
- 缺点:可能需系统允许短暂扰动。
5. 基于模型的整定
- 利用系统数学模型(传递函数、状态空间)设计参数,如极点配置、优化算法(最小化ITAE指标)。
- 适用场景:已知精确数学模型的高精度控制。
6. 智能优化算法
- 使用遗传算法、粒子群优化(PSO)等全局搜索技术,在参数空间中寻找最优解。
- 适用场景:多变量、非线性系统。
方法选择建议
- 快速调试:手动试凑法或Ziegler-Nichols临界比例度法。
- 高精度需求:基于模型或智能优化算法。
- 避免扰动:Cohen-Coon或软件自动整定(需评估扰动容忍度)。
注意事项:整定后需验证鲁棒性,并考虑抗积分饱和措施(如积分分离、Clamping)。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











