







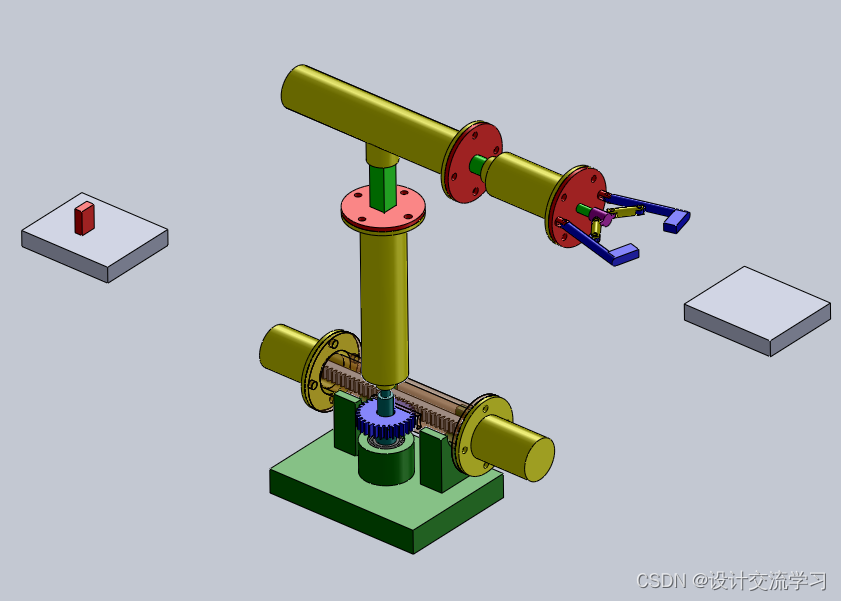
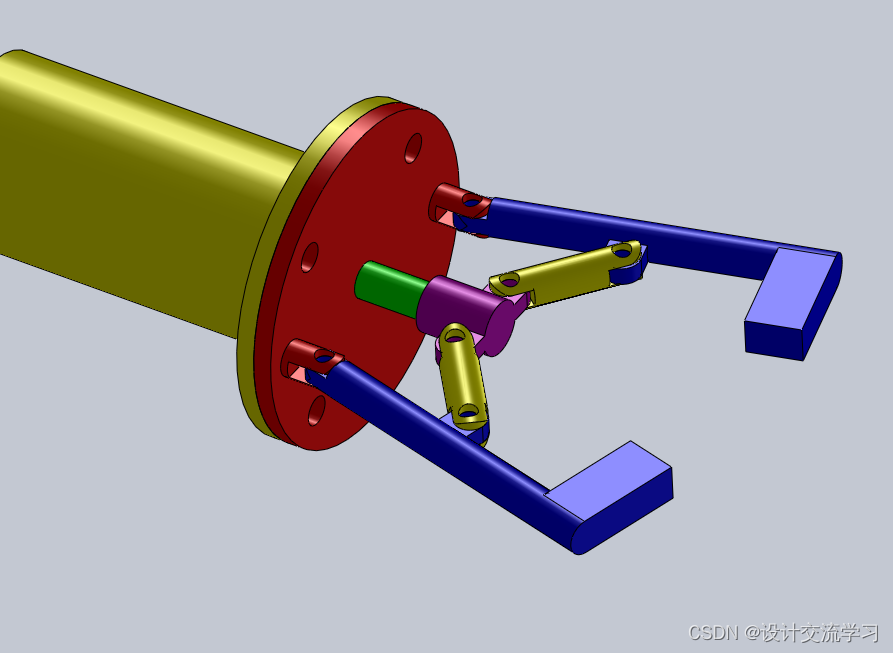
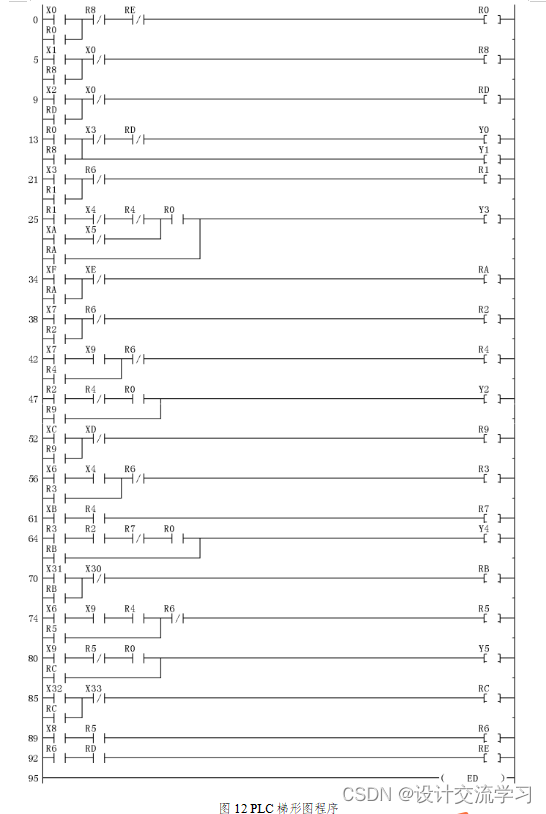
本文设计了一种气动搬运机械手,其控制部分采用PLC控制系统。论文首先对气动机械手的功能进行分析,确定了总体方案,并设计了驱动系统原理图。由设计参数对机械手的主要组成部分进行选型,并对其进行三维建模,用于演示其工作原理。然后,根据控制要求,对PLC进行了选型,编写出了控制系统的梯形图程序,并绘制出了硬件接线图。
关键词:机械手,PLC,气压传动
Abstract
Keywords: Manipulator,PLC,Pneumatic Transmission
1 绪论
由于机械制造、冶金、电子、轻工和原子能等领域的需要,能代替人的繁重劳动以实现生产的机械化和自动化、,在有害环境下操作以保护人身安全的机械手得到了广泛的应用。机械手是自动生产设备和生产线上的重要装置之一,它可以根据各种自动化设备的工作需要,按照预定的控制程序动作。因此,在机械加工、冲压、锻造、铸造、装配和热处理等生产过程中被广泛用来搬运工件,借以减轻工人的劳动强度;也可以自动取料、上料、卸料和自动换刀的功能,气动机械手是机械手的一种,它具有结构简单,重量轻,动作迅速、平稳、可靠和节能等优点。
机械手技术涉及到力学、机械学、液压气压传动、自动控制、传感器和计算机等多学科领域,是一门跨学科的综合技术。机械手是一种能自动化定位控制并可重新编程的多功能机器,它有多自由度,可代替人的劳动,以便在复杂、恶劣的环境中工作。
……



















 621
621

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









