







机械原理课程设计
说 明 书
设计题目:牛头刨床传动机构设计
及其运动分析
机电学院 班 学号
设计者
指导教师
年 月 日
(1)机构运动简图及原始数据和要求:
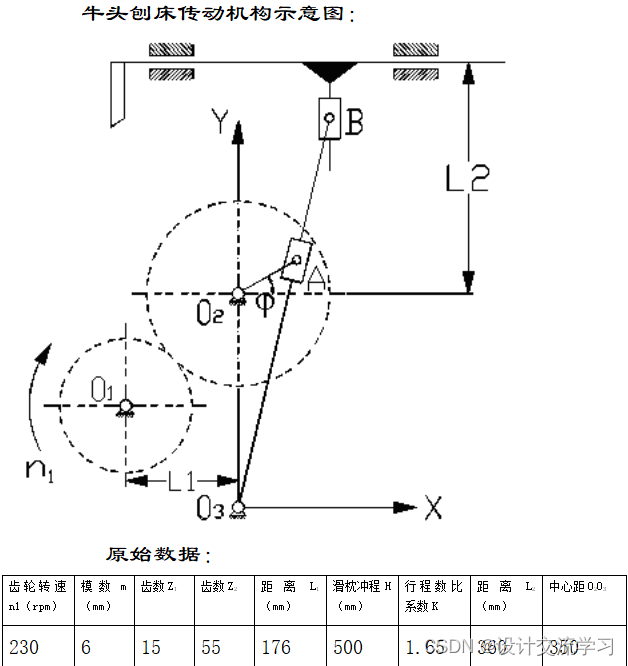
(2)设计过程及主要计算结果:
由K=(180°+θ)/(180°-θ)=1.65 得:θ=180°·(K-1)/(K+1)=44.15°
由α=(180°-θ)/2=67.92° 及cosα= O2A/O2O3 得:O2A=131.54㎜
由sin(90°-α)=0.5H/O3B 得:O3B=665.20㎜
又由机构分析得
S=-Lo3b*sin(j2)
w1=2*PI*n1/(60)
w2=w1*z1/z2
w3=Lo2a*w2*cos(j1-j2)/Lo3a
V=-w3*Lo3b*cos(j2)
Va=-Lo2a*w2*sin(j1-j2)
aj=-(2*Va*w3+Lo2a*w2*w2*sin(j1-j2))/Lo3a
at=Lo3b*aj*cos(j2)
an=Lo3b*w3*w3*sin(j2)
a=an-at
可得出机构刨刀滑枕位移s速度v及加速度a。
(3)计算原程序及注释:
#include <math.h>
#include <stdio.h>
#define PI 3.1415926
int i;
float n1=230,m=6,z1=15,z2=55,L1=176,H=500,K=1.65,L2=360,Lo23=350,Lo3b=665.20,Lo2a=131.54;/*定义参数*/
float j1,j2,tanj2,S,Lo2a,Lo3b,Lo3a,w1,w2,w3,V,Va,aj,at,an,a;/*定义变量(这里设O3A与Y轴夹角为角1,O3A与Y轴夹角为角2)*/
PRINT(float j1)
{ FILE *fp;
fp=fopen("d:\\NTB5.txt","a");
tanj2=(Lo2a*sin(j1))/(Lo23+Lo2a*cos(j1));
j2=atan(tanj2); /*求解角2*/
Lo3a=sqrt((Lo23+Lo2a*cos(j1))*(Lo23+Lo2a*cos(j1))+(Lo2a*sin(j1))*(Lo2a*sin(j1)));
S=-Lo3b*sin(j2);
w1=2*PI*n1/(60);
w2=w1*z1/z2;
w3=Lo2a*w2*cos(j1-j2)/Lo3a; /*求解O1.O2.O3角速度*/
V=-w3*Lo3b*cos(j2); /*求解刨刀速度*/
Va=-Lo2a*w2*sin(j1-j2); /*滑块A的法向速度*/
aj=-(2*Va*w3+Lo2a*w2*w2*sin(j1-j2))/Lo3a; /*滑块A的法向加速度*/
at=Lo3b*aj*cos(j2); /*滑块B的切向加速度*/
an=Lo3b*w3*w3*sin(j2); /*滑块B的法向加速度*/
a=an-at; /*刨刀的加速度*/
printf("%2d%12.3f%16.3f%16.3f%16.3f\n",i,j1/PI*180,S,V,a);
fprintf(fp,"%2d%12.3f%18.3f%18.3f%18.3f\n",i,j1/PI*180,S,V,a);
fclose(fp);
}
main()
…………



















 634
634

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









