









近年来,随着电子电子器件在电力拖动的电力电源中获得应用后,相继开发出各种交流调速系统,已经大面积的取代了直流调速系统,但是,直流调速系统的分析与控制理论依旧控制规律的基础,许多高性能的交流调速技术都是在直流调速理论的基础上发展起来的,而且有些小容量的直流调速系统现在仍在使用,因此掌握直流调速系统的基本规律和控制方法是非常有必要的。近代直流调速系统通常使用相控晶闸管(V-M)组成可控整流器进行供电,通过调节触发装置GT的控制电压Uc来移动触发脉冲的相位,改变可控整流器平均输出电压Ud,从而实现直流电动机的平滑调速,晶闸管可控整流器的功率放大器在以上,门极电流可以直接用电子控制,响应时间是毫秒级,具有快速的控制作用,运行损耗小,功率高等优点。
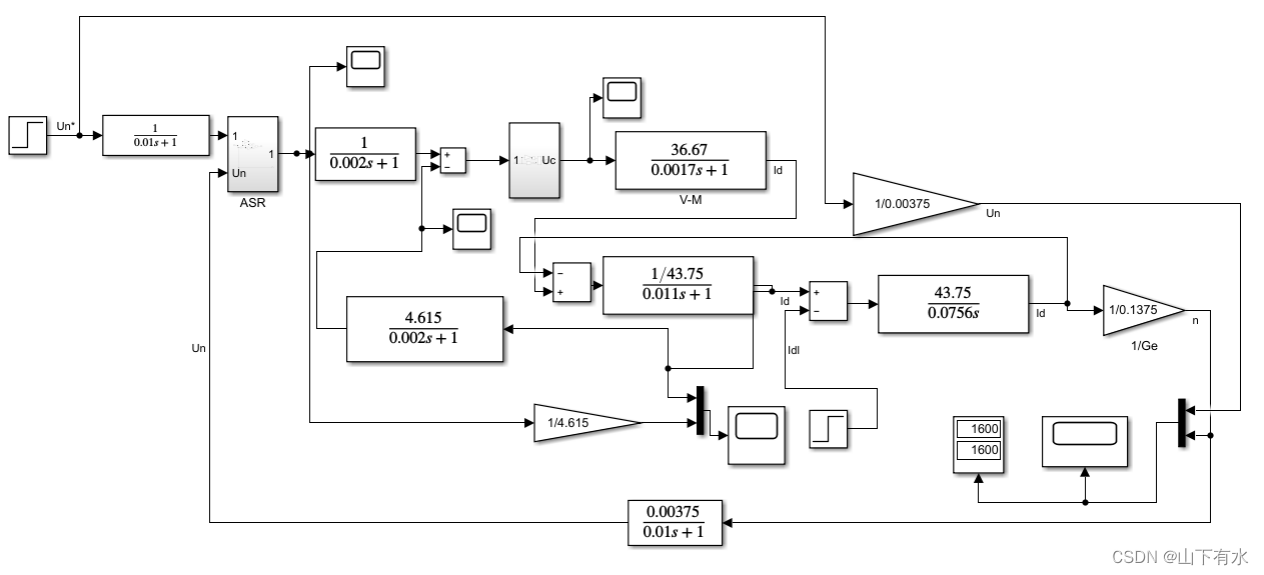
本次仿真时参照陈伯时老先生的《电机拖动自动控制系统-运动控制系统》采用一节惯性环节模拟V-M电源:

















 3732
3732

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









