







相机移动
在之前的渲染中,我们已经使用了Gouraud Shading,其想法非常简单,模型的制作者给出了模型中每个顶点的法向量,之后我们计算每个顶点的光照强度,然后在三角形中进行插值。
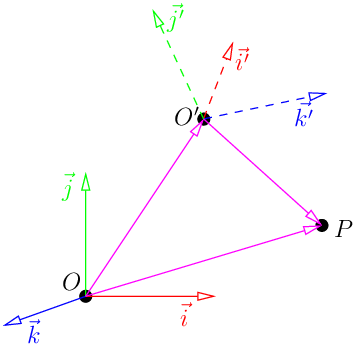
在欧几里得空间中,坐标可以有一个原点和一个基
(
O
,
i
⃗
,
j
⃗
,
k
⃗
)
(O,\vec{i},\vec{j},\vec{k})
(O,i,j,k)组成,假设点
P
P
P的坐标为
(
x
,
y
,
z
)
(x,y,z)
(x,y,z),则
O
P
→
\overrightarrow{OP}
OP可以用下面的式子表示:
O
P
→
=
i
⃗
x
+
j
⃗
y
+
k
⃗
z
=
[
i
⃗
j
⃗
k
⃗
]
[
x
y
z
]
\overrightarrow{OP} = \vec{i}x+\vec{j}y+\vec{k}z= \left[\begin{array}{} \ \vec{i}&\vec{j}&\vec{k} \ \end{array}\right] \left[\begin{array}{} x \\y \\ z \end{array}\right]
OP=ix+jy+kz=[ ijk ]
xyz
现在假设我们有另一个基于点的基
(
O
′
,
i
⃗
′
,
j
⃗
′
,
k
⃗
′
)
(O',\vec{i}',\vec{j}',\vec{k}')
(O′,i′,j′,k′),那么我们如何从之前的基进行变换得到现有的基呢?那么存在一个矩阵
M
M
M,可以得到最终的变换:
[
i
⃗
j
⃗
k
⃗
]
=
[
i
′
⃗
j
′
⃗
k
′
⃗
]
×
M
\left[\begin{array}{} \ \vec{i}&\vec{j}&\vec{k} \ \end{array}\right] = \left[\begin{array}{} \ \vec{i'}&\vec{j'}&\vec{k'} \ \end{array}\right] \times M
[ ijk ]=[ i′j′k′ ]×M
其具体过程如下图所示:
那么对于
O
P
→
\overrightarrow{OP}
OP,我们可以得到:
O
P
→
=
O
O
′
→
+
O
’
P
→
=
[
i
⃗
j
⃗
k
⃗
]
[
O
x
′
O
y
′
O
z
′
]
+
[
i
′
⃗
j
′
⃗
k
′
⃗
]
[
x
′
y
′
z
′
]
\overrightarrow{OP} = \overrightarrow{OO'} + \overrightarrow{O’P} = \left[\begin{array}{} \ \vec{i}&\vec{j}&\vec{k} \ \end{array}\right] \left[\begin{array}{} \ O'_x \\ O'_y \\ O'_z\ \end{array}\right] + \left[\begin{array}{} \ \vec{i'}&\vec{j'}&\vec{k'} \ \end{array}\right] \left[\begin{array}{} x' \\ y' \\ z' \end{array}\right]
OP=OO′+O’P=[ ijk ]
Ox′Oy′Oz′
+[ i′j′k′ ]
x′y′z′
我们可以将上面的式子进行结合
O
P
→
=
O
O
′
→
+
O
’
P
→
=
[
i
⃗
j
⃗
k
⃗
]
(
[
O
x
′
O
y
′
O
z
′
]
+
M
[
x
′
y
′
z
′
]
)
\overrightarrow{OP} = \overrightarrow{OO'} + \overrightarrow{O’P} = \left[\begin{array}{} \ \vec{i}&\vec{j}&\vec{k} \ \end{array}\right] \left( \left[\begin{array}{} \ O'_x \\ O'_y \\ O'_z\ \end{array}\right] + M \left[\begin{array}{} x' \\ y' \\ z' \end{array}\right] \right)
OP=OO′+O’P=[ ijk ]
Ox′Oy′Oz′
+M
x′y′z′
得到下面的式子
[
x
y
z
]
=
[
O
x
′
O
y
′
O
z
′
]
+
M
[
x
′
y
′
z
′
]
⟶
[
x
′
y
′
z
′
]
=
M
−
1
(
[
x
y
z
]
−
[
O
x
′
O
y
′
O
z
′
]
)
\left[\begin{array}{} x \\y \\ z \end{array}\right] = \left[\begin{array}{} \ O'_x \\ O'_y \\ O'_z\ \end{array}\right] + M \left[\begin{array}{} x' \\ y' \\ z' \end{array}\right] \longrightarrow \left[\begin{array}{} x' \\ y' \\ z' \end{array}\right] = M^{-1} \left( \left[\begin{array}{} x \\y \\ z \end{array}\right] - \left[\begin{array}{} \ O'_x \\ O'_y \\ O'_z\ \end{array}\right] \right)
xyz
=
Ox′Oy′Oz′
+M
x′y′z′
⟶
x′y′z′
=M−1
xyz
−
Ox′Oy′Oz′
创建我们自己的gluLookAt
OpenGL和我们的小型渲染器只能在摄像机位于z轴上的情况下绘制场景。如果我们想移动相机,我们可以移动所有场景,让相机静止不动。我们可以这样考虑我们的问题,我们想将相机放置于点 e e e(眼睛)绘制场景,相机应该指向点 c c c(中心),这样给定的向量u(向上)在最终渲染中是垂直的。
这意味着我们要在 ( c , x ′ , y ′ , z ′ ) (c,x',y',z') (c,x′,y′,z′)中进行渲染,但是我们的模型的基是在 ( O , x , y , z ) (O,x,y,z) (O,x,y,z)中给出的,我们所需要的只是计算坐标的变换。以下是一个C++代码,用于计算必要的4x4矩阵ModelView:
mat<4,4> lookat(vec3 eye, vec3 center, vec3 up) {
vec3 z = (eye - center).normalized();
vec3 x = cross(up, z).normalized();
vec3 y = cross(x, z).normalized();
mat<4, 4> res;
res = res.identity();
for (int i = 0; i < 3; i++) {
res[0][i] = x[i];
res[1][i] = y[i];
res[2][i] = z[i];
res[i][3] = -center[i];
}
return res;
}
z’是由向量ce给出的(不要忘记对其进行归一化,稍后会有所帮助)。我们如何计算x’?简单地通过u和z之间的叉积。然后我们计算y’,使其与已经计算的x’和z’正交(让我提醒您,在我们的问题设置中,ce和u不一定正交)。最后一步是将原点转换到观察者e的点,我们的变换矩阵就准备好了。现在,只要在模型帧中获得坐标为(x,y,z,1)的任何点,将其乘以矩阵ModelView,就可以获得相机帧中的坐标!顺便说一句,ModelView这个名称来自OpenGL术语。
ViewPort
在之前我们写过下面这段代码:
screen_coords[j] = Vec2i((v.x+1.)*width/2., (v.y+1.)*height/2.);
它的主要目的是将一个属于[-1.1] * [-1,1]范围内的方形平面中的点映射到(width, height)这个平面,值(v.x+1)在0和2之间变化,(v.x+1)/2在0和1之间变化,并且(v.x+1)*width/2扫描所有图像。因此,我们有效地将双单位正方形映射到图像上。现在我们可以改变一下上面的代码:
mat<4,4> viewport(int x, int y, int w, int h) {
mat<4, 4> m;
m = m.identity();
m[0][3] = x + w / 2.f;
m[1][3] = y + h / 2.f;
m[2][3] = depth / 2.f;
m[0][0] = w / 2.f;
m[1][1] = h / 2.f;
m[2][2] = depth / 2.f
return m;
}
这意味着双单位立方体[-1,1][-1,1][-1,1]被映射到屏幕立方体[x,x+w][y,y+h][0,d]上。立方体而不是矩形,这是因为使用z缓冲区进行深度计算。这里d是z缓冲区的分辨率。我喜欢它等于255,因为转储z缓冲区的黑白图像以进行调试很简单。
链式坐标变换
所以,让我们总结一下。我们的模型(例如角色)是在它们自己的局部框架(对象坐标)中创建的。它们被插入到以世界坐标表示的场景中。从一个到另一个的转换是用矩阵模型进行的。然后,我们想在相机帧(眼睛坐标)中表达它,这种变换被称为View。然后,我们使用投影矩阵对场景进行变形以创建透视变形(第4课),该矩阵将场景转换为所谓的剪辑坐标。最后,我们绘制场景,将剪辑坐标转换为屏幕坐标的矩阵称为Viewport。
同样,如果我们从.obj文件中读取一个点v,然后在屏幕上绘制它,它将经历以下转换链:
Viewport * Projection * View * Model * v.
我们在具体实现时,使用了下面的代码:
Vec3f v = model->vert(face[j]);
screen_coords[j] = Vec3f(ViewPort*Projection*ModelView*Matrix(v));
当我们只渲染一个对象时,矩阵Model等于单位矩阵,因此将其与矩阵View合并。
法向量变换
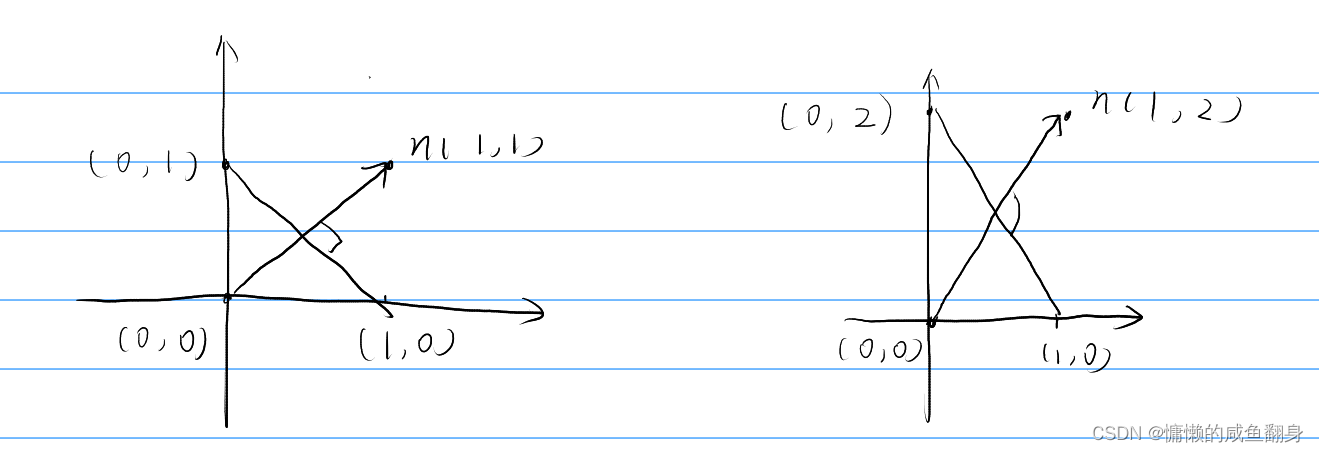
- 如果我们有一个模型,它的法向量是由艺术家给出的,并且这个模型用仿射映射变换,那么法向量要用映射变换,等于原始映射矩阵的逆矩阵的换位
对于上面这句话,我们可以具体举一个例子说明,假设2D平面上存在一个三角形,三角形三个点坐标为(0,0),(1,0),(0,1),我们可以得到一个向量n(1,1),垂直于斜边,现在我们对这三个坐标进行仿射变换,将y坐标拉伸两倍,如果我们也将向量n的y坐标拉伸,那么最终的结果向量n将不再垂直于斜边。
对于法向量的处理,我们不能对原先的法向量进行简单的变换,因为他们可能不再是正常的,因此我们需要计算变换后模型的新的法向量。回到3D空间中,我们现在有一个法向量n=(A,B,C),这个法向量穿过原点,因此我们有下式:
A
x
+
B
y
+
C
z
=
0
Ax+By+Cz=0
Ax+By+Cz=0
现在我们将n的坐标扩展为齐次坐标,可以得到下面这个式子:
[
A
B
C
0
]
×
[
x
y
z
1
]
=
0
\left[\begin{array}{}A&B&C&0\end{array}\right]\ \times \ \left[\begin{array}{}x \\ y \\ z \\ 1 \end{array}\right] = 0
[ABC0] ×
xyz1
=0
其中由于n为向量,因此用0填充,而xyz为点则用1来填充。
让我们在两者之间插入一个单位矩阵(M乘以M的倒数等于单位):
(
[
A
B
C
0
]
×
M
−
1
)
×
(
M
×
[
x
y
z
1
]
)
=
0
\left(\left[\begin{array}{}A&B&C&0\end{array}\right]\ \times M^{-1} \right) \times \ \left(M \times \left[\begin{array}{}x \\ y \\ z \\ 1 \end{array}\right]\right) = 0
([ABC0] ×M−1)×
M×
xyz1
=0
右括号中的表达式-表示对象的变换点。在左边-表示变换对象的法线向量。在标准约定中,我们通常将坐标写为列,因此我们可以将前面的表达式重写如下
(
(
M
T
)
−
1
×
[
A
B
C
0
]
)
T
×
(
M
×
[
x
y
z
1
]
)
=
0
\left( (M^T)^{-1} \times \left[\begin{array}{}A \\ B \\ C \\ 0\end{array}\right]\ \right)^T \times \ \left(M \times \left[\begin{array}{}x \\ y \\ z \\ 1 \end{array}\right]\right) = 0
(MT)−1×
ABC0
T×
M×
xyz1
=0
左括号告诉我们,通过应用仿射映射的逆转置矩阵,可以从旧法线计算变换对象的法线。如果我们的变换矩阵M是均匀缩放、旋转和平移的组合,那么M等于它的逆转置,因为在这种情况下,逆转置和转置是相互抵消的。但由于我们的矩阵包括透视变形,通常这种技巧没有帮助。
main.cpp
#include <vector>
#include <iostream>
#include <cmath>
#include <limits>
#include "tgaimage.h"
#include "model.h"
#include "geometry.h"
const int width = 800;
const int height = 800;
const int depth = 1024;
double* zbuffer = NULL;
vec3 light_dir = {0, 1, 0};
//vec3 light_dir = light_dir.normalized();
vec3 eye = { 3, 3, 3 };
vec3 center{ 0, 0, 0 };
mat<4,4> viewport(int x, int y, int w, int h) {
mat<4, 4> m;
m = m.identity();
m[0][3] = x + w / 2.f;
m[1][3] = y + h / 2.f;
m[2][3] = depth / 2.f;
m[0][0] = w / 2.f;
m[1][1] = h / 2.f;
m[2][2] = depth / 2.f;
return m;
}
mat<4,4> lookat(vec3 eye, vec3 center, vec3 up) {
vec3 z = (eye - center).normalized();
vec3 x = cross(up, z).normalized();
vec3 y = cross(x, z).normalized();
mat<4, 4> res;
res = res.identity();
for (int i = 0; i < 3; i++) {
res[0][i] = x[i];
res[1][i] = y[i];
res[2][i] = z[i];
res[i][3] = -center[i];
}
return res;
}
void triangle(vec3 t0, vec3 t1, vec3 t2, float ity0, float ity1, float ity2, TGAImage& image, double* zbuffer) {
if (t0.y == t1.y && t0.y == t2.y) return; // i dont care about degenerate triangles
if (t0.y > t1.y) { std::swap(t0, t1); std::swap(ity0, ity1); }
if (t0.y > t2.y) { std::swap(t0, t2); std::swap(ity0, ity2); }
if (t1.y > t2.y) { std::swap(t1, t2); std::swap(ity1, ity2); }
int total_height = t2.y - t0.y;
for (int i = 0; i < total_height; i++) {
bool second_half = i > t1.y - t0.y || t1.y == t0.y;
int segment_height = second_half ? t2.y - t1.y : t1.y - t0.y;
float alpha = (float)i / total_height;
float beta = (float)(i - (second_half ? t1.y - t0.y : 0)) / segment_height; // be careful: with above conditions no division by zero here
vec3 A = t0 + vec3(t2 - t0) * alpha;
vec3 B = second_half ? t1 + vec3(t2 - t1) * beta : t0 + vec3(t1 - t0) * beta;
float ityA = ity0 + (ity2 - ity0) * alpha;
float ityB = second_half ? ity1 + (ity2 - ity1) * beta : ity0 + (ity1 - ity0) * beta;
if (A.x > B.x) { std::swap(A, B); std::swap(ityA, ityB); }
for (int j = A.x; j <= B.x; j++) {
float phi = B.x == A.x ? 1. : (float)(j - A.x) / (B.x - A.x);
vec3 P = vec3(A) + vec3(B - A) * phi;
float ityP = ityA + (ityB - ityA) * phi;
int idx = P.x + P.y * width;
if (P.x >= width || P.y >= height || P.x < 0 || P.y < 0) continue;
if (zbuffer[idx] < P.z) {
zbuffer[idx] = P.z;
TGAColor color{ (std::uint8_t)255 * ityP, (std::uint8_t)255 * ityP, (std::uint8_t)255 * ityP, (std::uint8_t)255 * ityP };
image.set(P.x, P.y, color );
}
}
}
}
vec3 barycentric(vec3 A, vec3 B, vec3 C, vec3 P) {
vec3 s[2];
for (int i = 2; i--; ) {
s[i][0] = C[i] - A[i];
s[i][1] = B[i] - A[i];
s[i][2] = A[i] - P[i];
}
vec3 u = cross(s[0], s[1]);
if (std::abs(u[2]) > 1e-2) // dont forget that u[2] is integer. If it is zero then triangle ABC is degenerate
return vec3{ 1.f - (u.x + u.y) / u.z, u.y / u.z, u.x / u.z };
return vec3{ -1, 1, 1 }; // in this case generate negative coordinates, it will be thrown away by the rasterizator
}
/*
* 带z-buffer的三角形渲染算法
*/
void triangle(vec3* pts, vec2* puv, vec3* origin, Model* model, double* zbuffer, TGAImage& image)
{
//确定三角形的包围框
vec2 bboxmin{ std::numeric_limits<double>::max(), std::numeric_limits<double>::max() };
vec2 bboxmax{ std::numeric_limits<double>::min(), std::numeric_limits<double>::min() };
vec2 bboxclamp{ ((double)image.width() - 1.), ((double)image.height() - 1.) };
//遍历三角形顶点,确定四边形边框
for (int i = 0; i < 3; i++)
{
bboxmin.x = std::max(0., std::min(bboxmin.x, pts[i].x));
bboxmin.y = std::max(0., std::min(bboxmin.y, pts[i].y));
bboxmax.x = std::min(bboxclamp.x, std::max(bboxmax.x, pts[i].x));
bboxmax.y = std::min(bboxclamp.y, std::max(bboxmax.y, pts[i].y));
}
//遍历框内像素,确定像素点是否在三角形内部(使用重心坐标判断)
vec3 p{};
for (p.x = bboxmin.x; p.x <= bboxmax.x; p.x++) {
for (p.y = bboxmin.y; p.y <= bboxmax.y; p.y++) {
vec3 bc_screen = barycentric(pts[0], pts[1], pts[2], p);
if (bc_screen.x < 0 || bc_screen.y < 0 || bc_screen.z < 0) continue;
//利用重心坐标计算三角形内点p的z坐标值
p.z = 0;
//for (int i = 0; i < 3; i++) p.z += pts[i][2] * bc_screen[i];
p.z = 1. / (bc_screen[0] / pts[0].z + bc_screen[1] / pts[1].z + bc_screen[2] / pts[2].z);
vec2 color_coords{};
for (int i = 0; i < 3; i++) {
color_coords.x += puv[i].x * (double)model->diffuse().width() * bc_screen[i] / pts[i].z;
color_coords.y += puv[i].y * (double)model->diffuse().height() * bc_screen[i] / pts[i].z;
}
//for (int i = 0; i < 3; i++) {
// color_coords.x += puv[i].x * (double)model->diffuse().width() * bc_screen[i];
// color_coords.y += puv[i].y * (double)model->diffuse().height() * bc_screen[i];
//}
TGAColor color = model->diffuse().get((int)(color_coords.x * p.z), (int)(color_coords.y * p.z));
//更新z-buffer,并且只有更新的时候,需要渲染更近的像素颜色值
//double到int会有精度损失,因此不能涵盖到所有zbuffer
if (zbuffer[(int)p.x + (int)p.y * image.width()] <= p.z) {
zbuffer[(int)p.x + (int)p.y * image.width()] = p.z;
image.set((int)p.x, (int)p.y, color);
}
}
}
}
mat<4, 1> v2m(vec3 coords) {
mat<4, 1> matrix{};
matrix[0][0] = coords.x;
matrix[1][0] = coords.y;
matrix[2][0] = coords.z;
matrix[3][0] = 1;
return matrix;
}
vec3 m2v(mat<4, 1> matrix) {
return vec3{ matrix[0][0] / matrix[3][0], matrix[1][0] / matrix[3][0], matrix[2][0] / matrix[3][0] };
}
int main() {
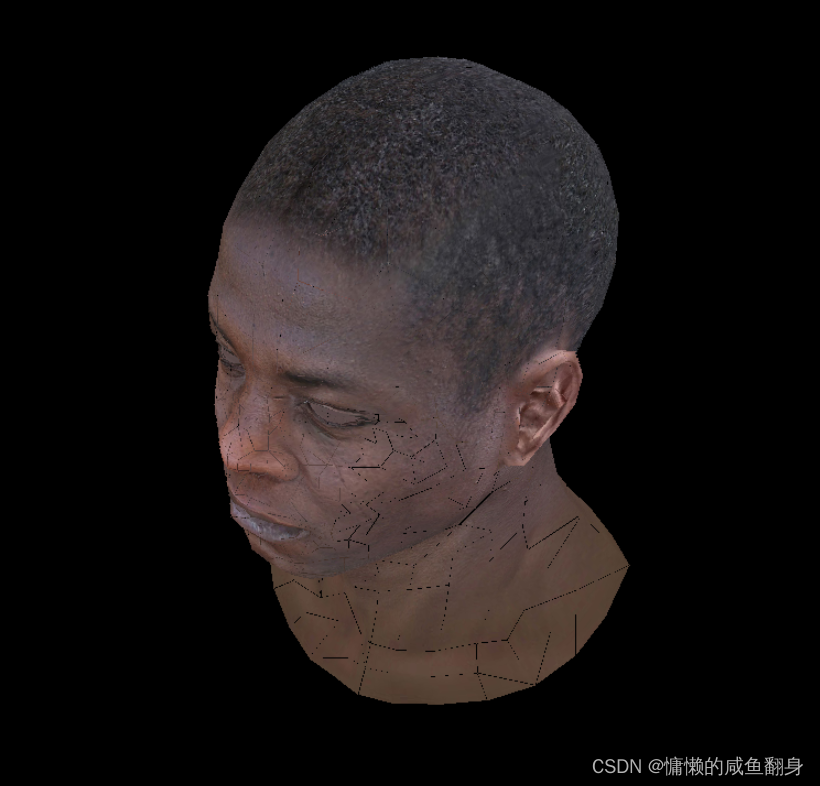
Model* model = new Model("obj/african_head/african_head.obj");
zbuffer = new double[width * height];
for (int i = 0; i < width * height; i++) {
zbuffer[i] = std::numeric_limits<double>::min();
}
{ // draw the model
mat<4, 4> ModelView = lookat(eye, center, vec3{ 0, 1, 0 });
mat<4, 4> Projection;
Projection = Projection.identity();
mat<4, 4> ViewPort = viewport(width / 8, height / 8, width * 3 / 4, height * 3 / 4);
Projection[3][2] = -1.f / (eye - center).norm();
std::cerr << ModelView << std::endl;
std::cerr << Projection << std::endl;
std::cerr << ViewPort << std::endl;
mat<4, 4> z = ViewPort * Projection * ModelView;
std::cerr << z << std::endl;
TGAImage image(width, height, TGAImage::RGB);
//第几个三角形
for (int i = 0; i < model->nfaces(); i++) {
vec3 world_coords[3]{};
vec3 origin_coords[3]{};
vec3 screen_coords[3]{};
vec2 uv_coords[3]{};
float intensity[3]{};
for (int j = 0; j < 3; j++) {
world_coords[j] = model->vert(i, j);
uv_coords[j] = model->uv(i, j);
screen_coords[j] = m2v(ViewPort * Projection * ModelView * v2m(world_coords[j]));
origin_coords[j] = m2v(Projection * ModelView * v2m(world_coords[j]));
//intensity[j] = model->normal(i, j) * light_dir;
}
//triangle(screen_coords[0], screen_coords[1], screen_coords[2], intensity[0], intensity[1], intensity[2], image, zbuffer);
triangle(screen_coords, uv_coords, origin_coords, model, zbuffer, image);
}
image.flip_vertically(); // i want to have the origin at the left bottom corner of the image
image.write_tga_file("output.tga");
}
delete model;
delete[] zbuffer;
return 0;
}















 164
164











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









