







功能介绍:
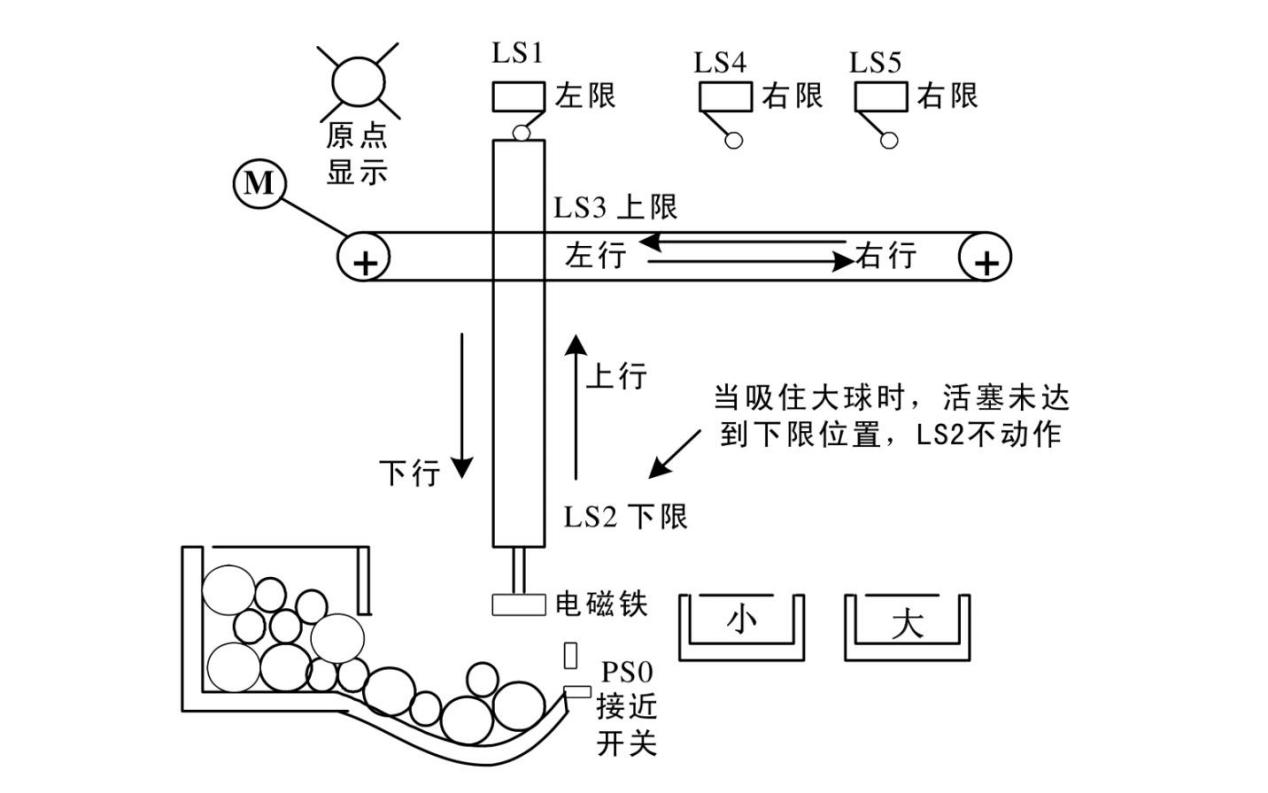
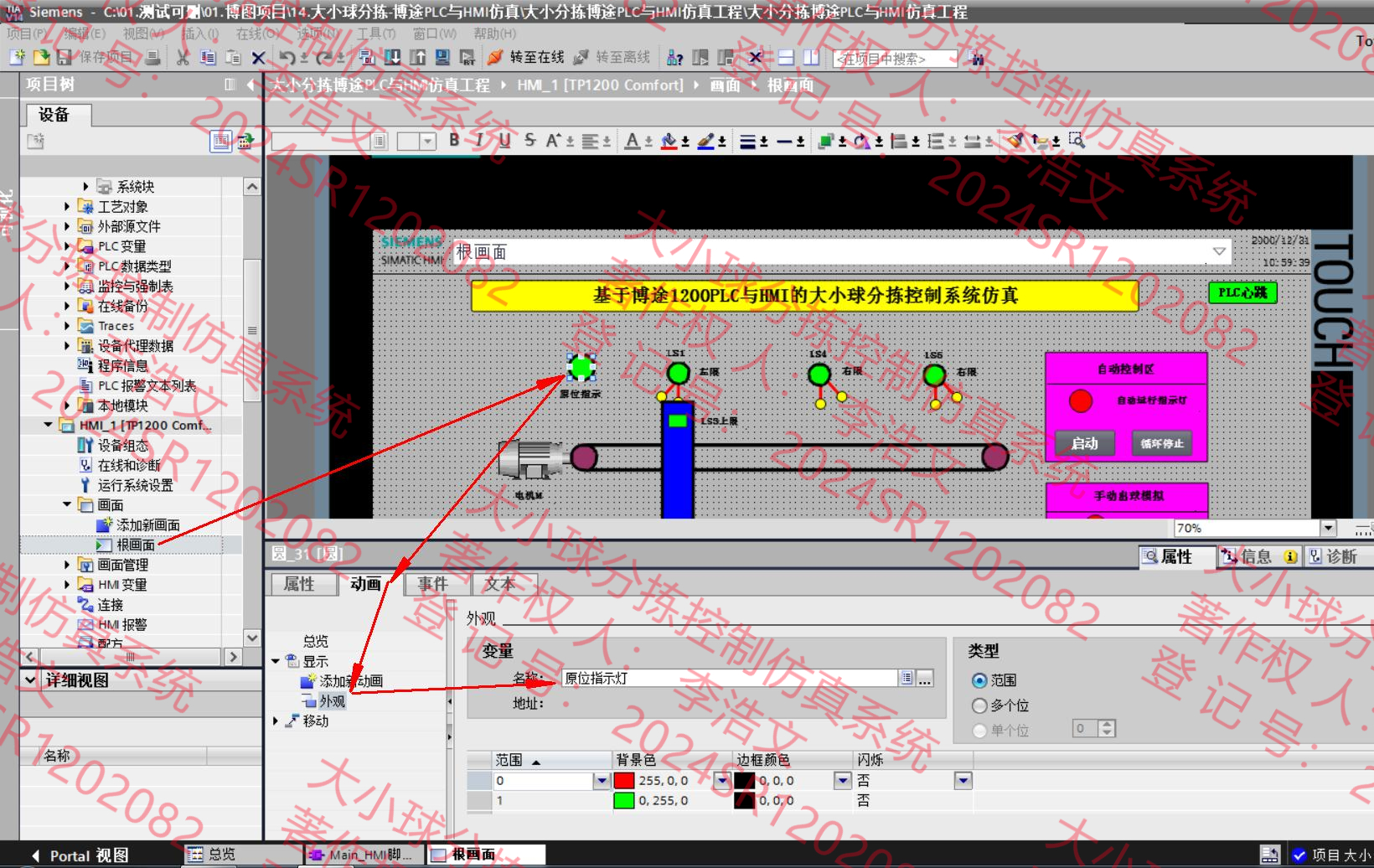
①机械臂起始位置在机械原点(见图),为左限、上限并有显示。
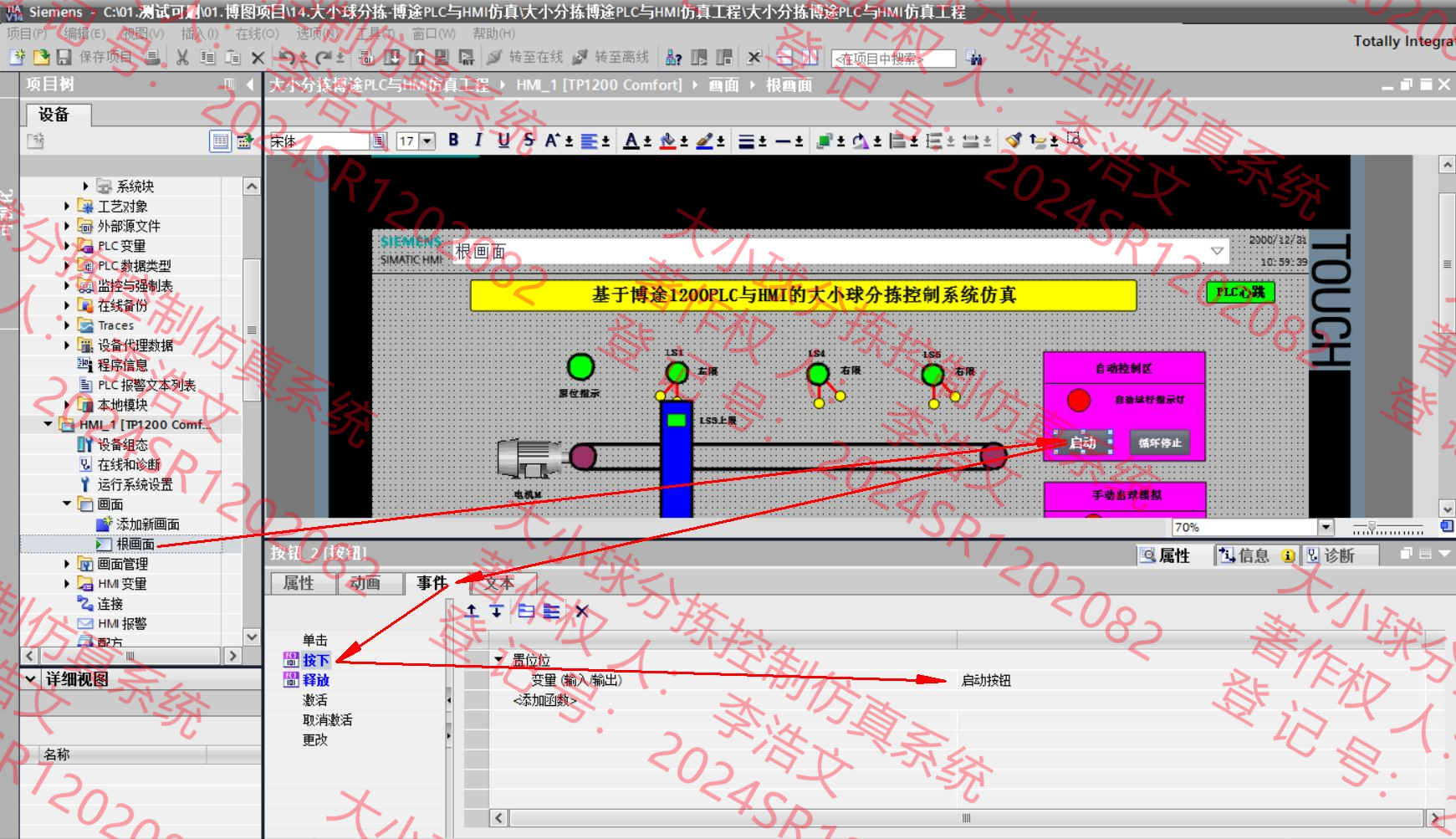
②有起动按钮和停止按钮控制运行,设停止时机械臂必须已回到原点。
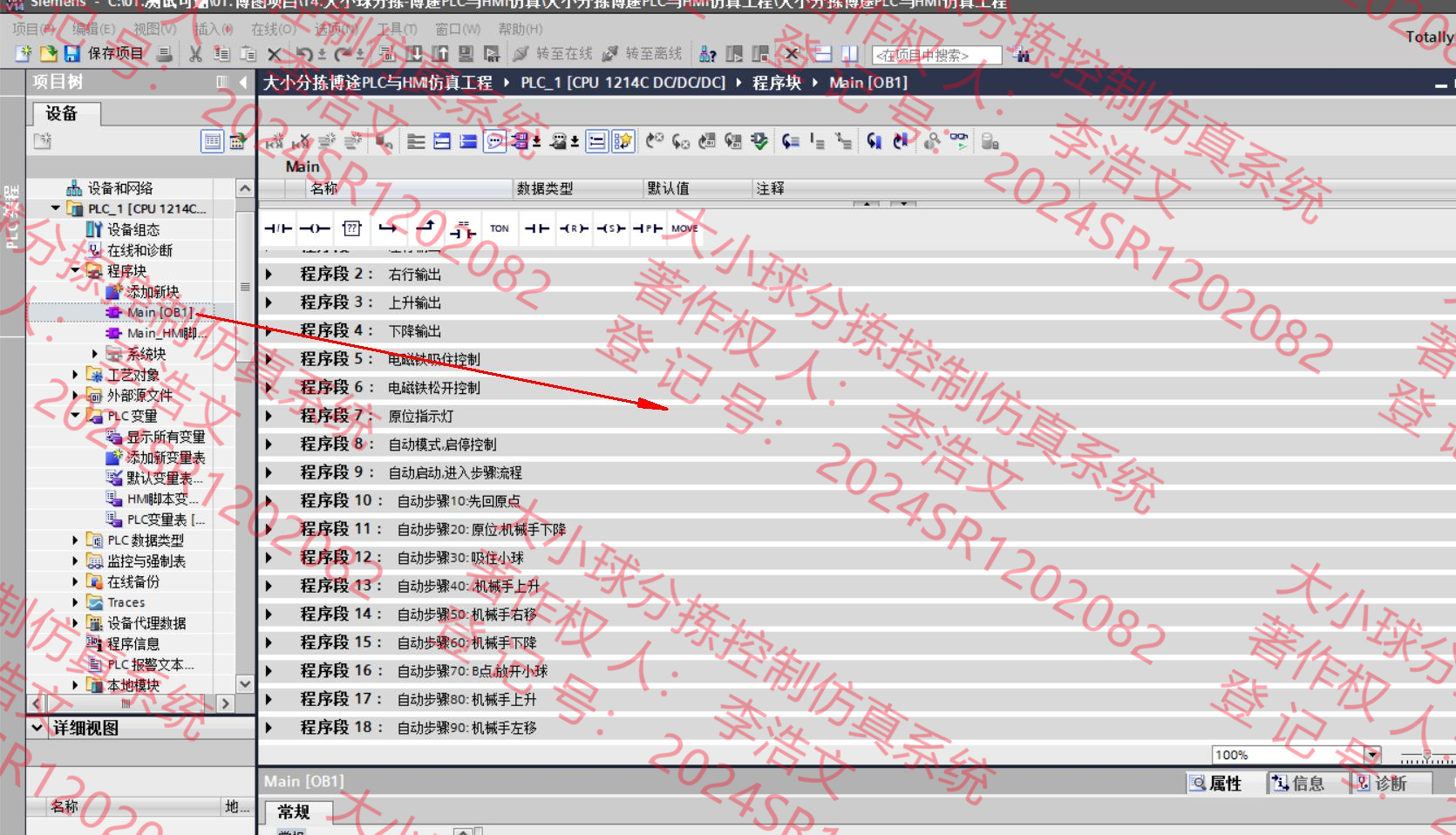
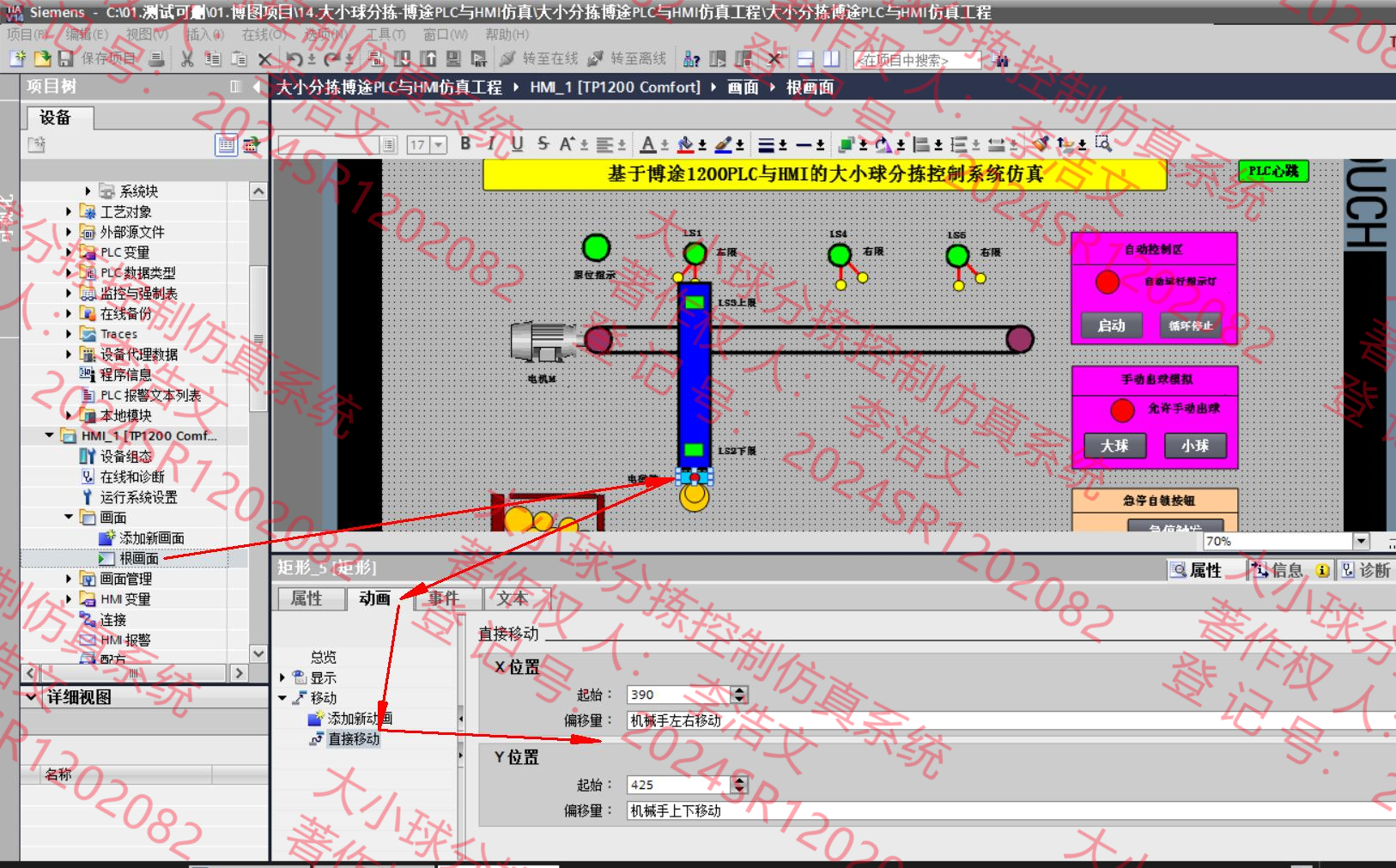
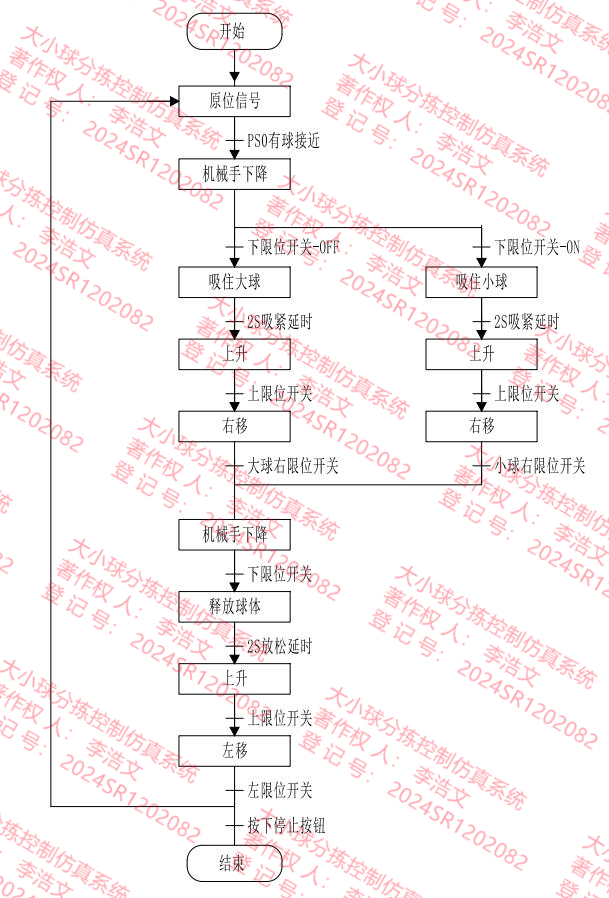
③起动后,机械臂动作顺序为:下降→吸球一上升(至上限)一右行(至右限)→下降→释放→上升(至上限)→左行返回(至原点)。
④机械臂右行时有小球右限(LS4)和大球右限(LS5)之分;下降时,当电磁铁压着大球时,下限开关LS2断开(=“0”);压着小球时,下限开关LS2接通(=“1”)。
===============================
三、售后服务:
本商品属于我本人原创,对于本商品内容的程序设计问题,免费帮忙亲排疑解答!售后无忧!
==============================
四、运行环境
运行环境:博途V14 或者 V14以上版本
===============================
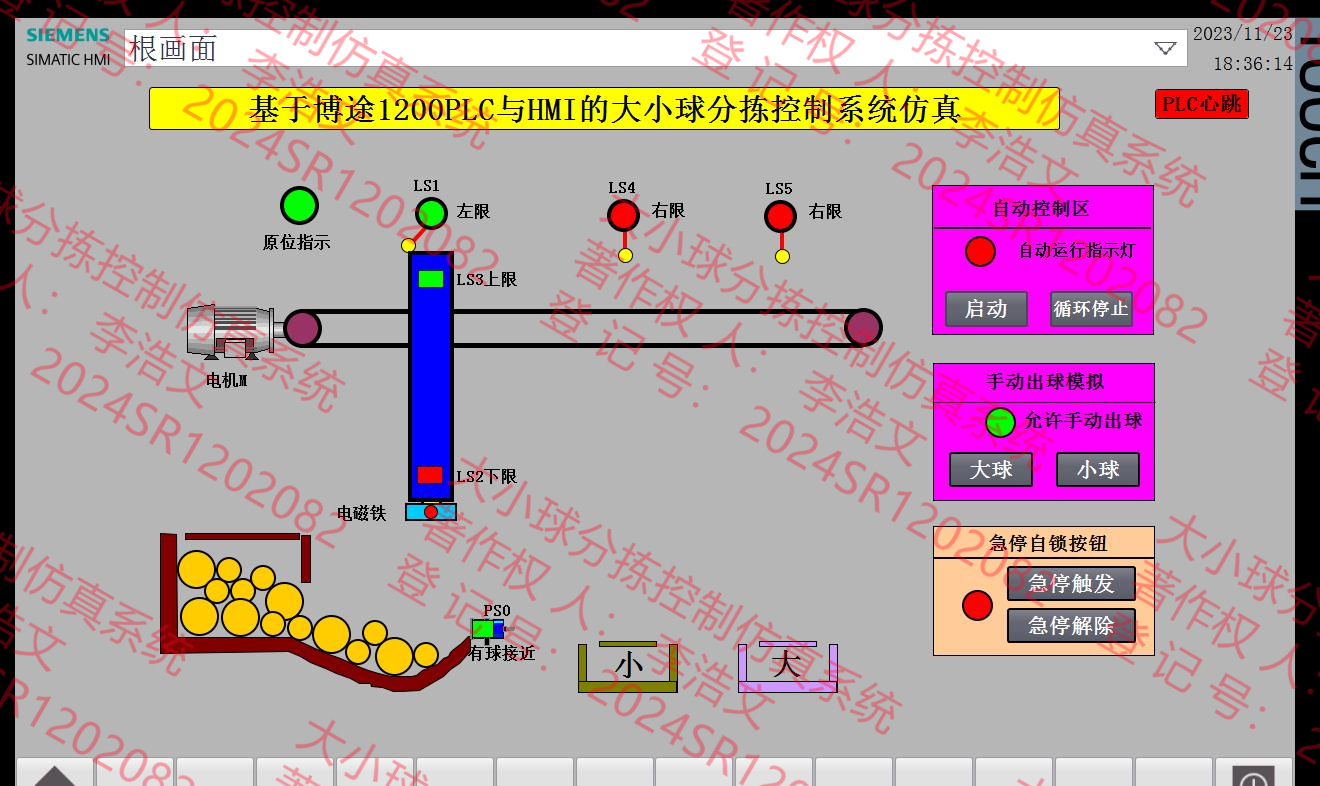
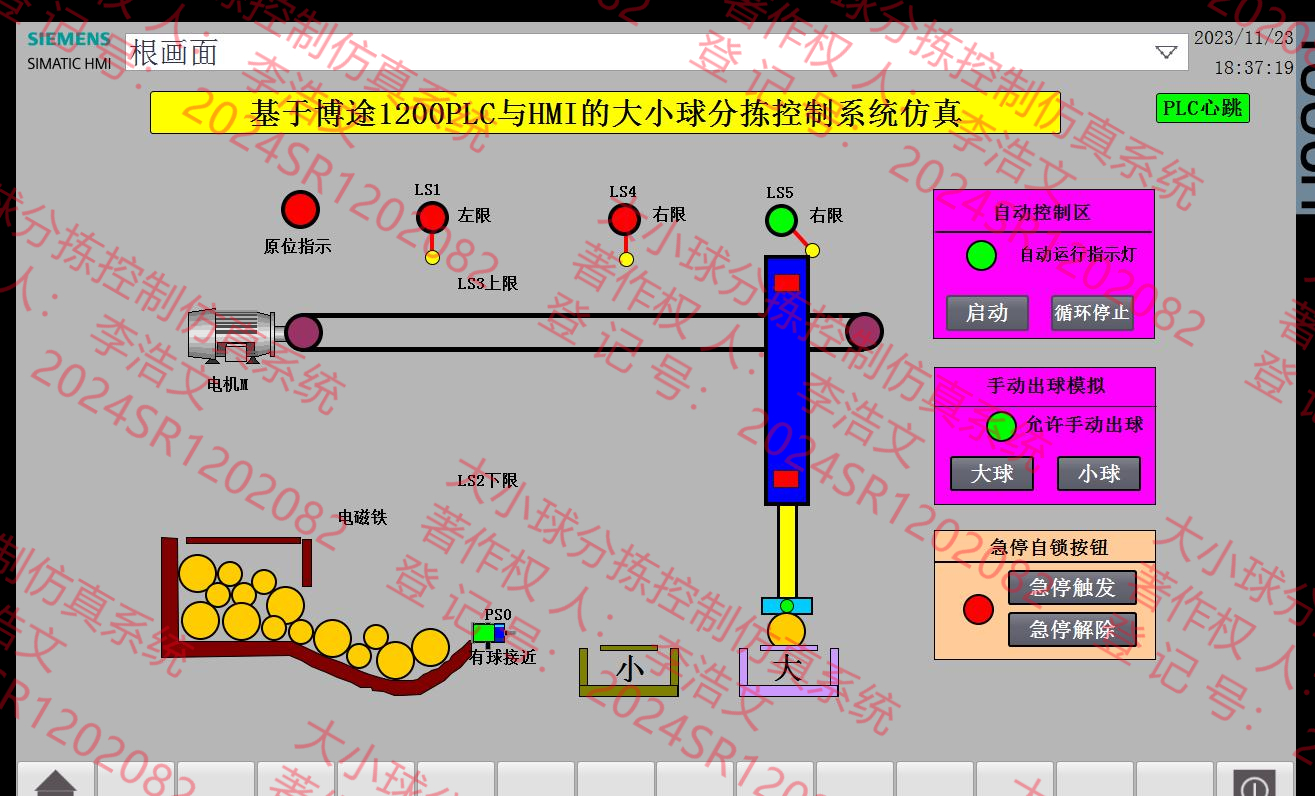
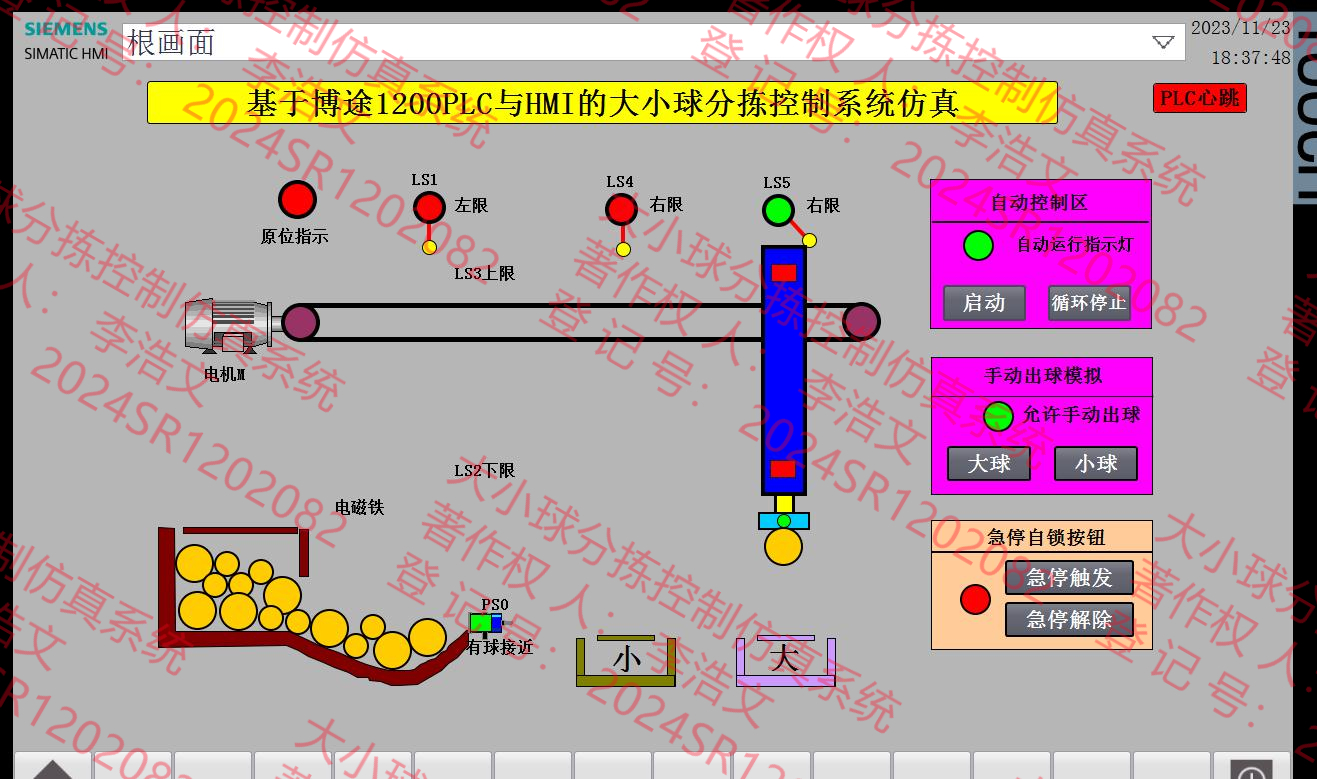
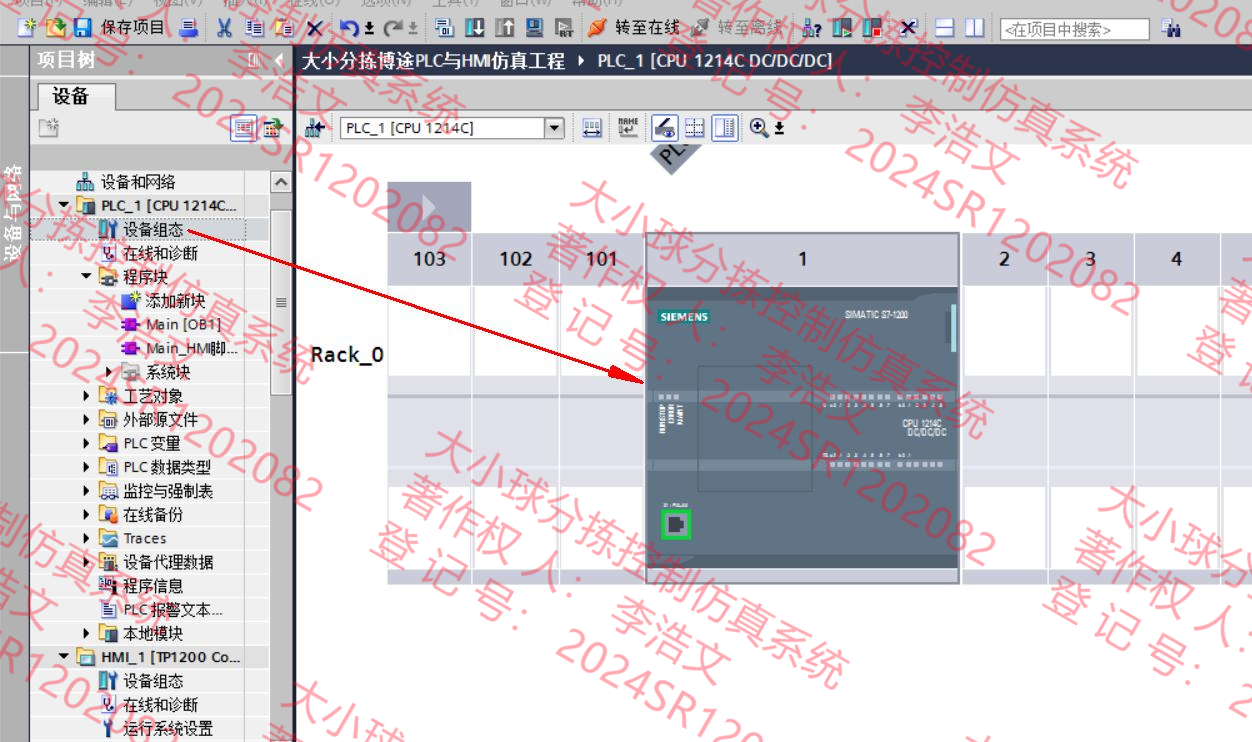
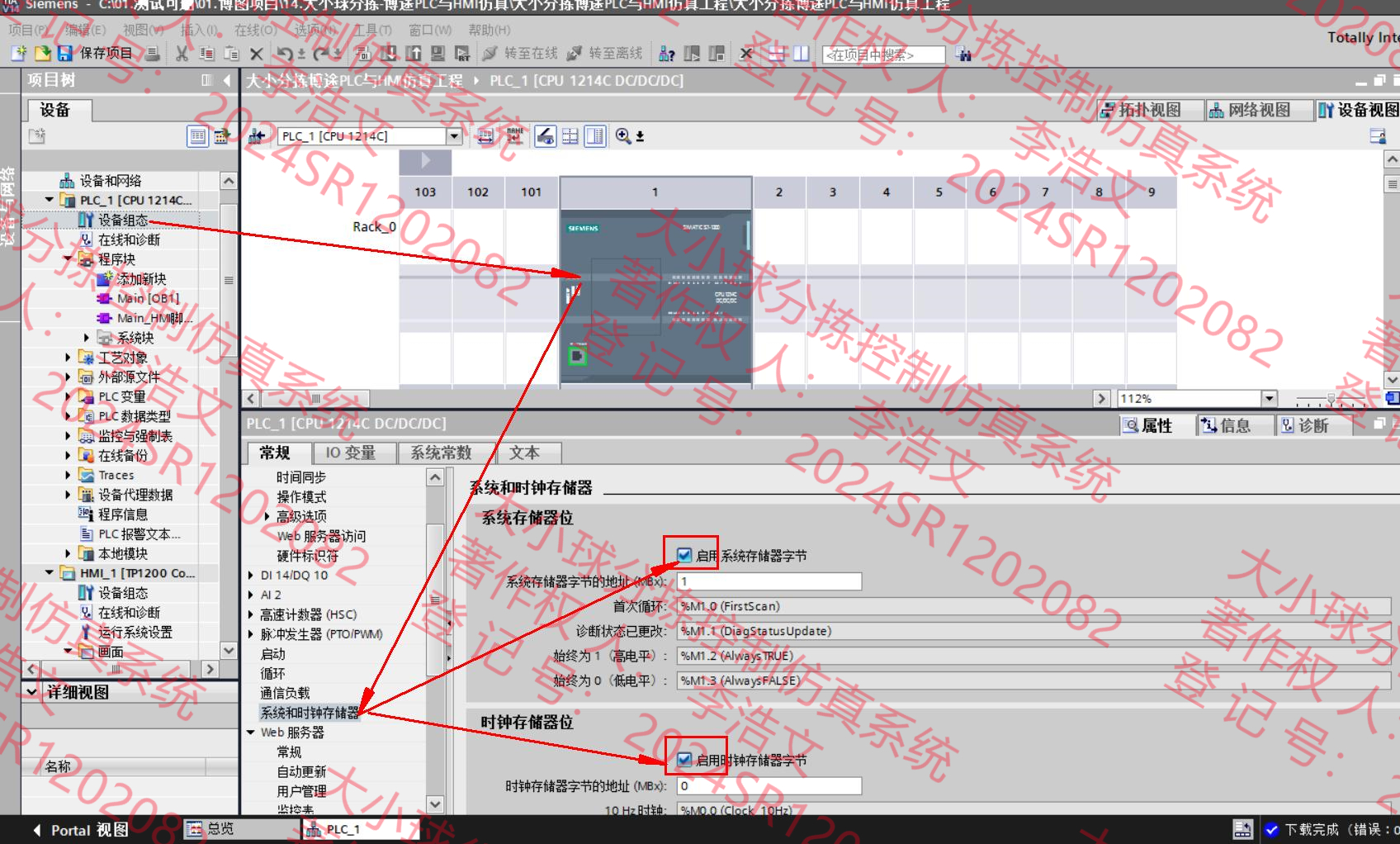
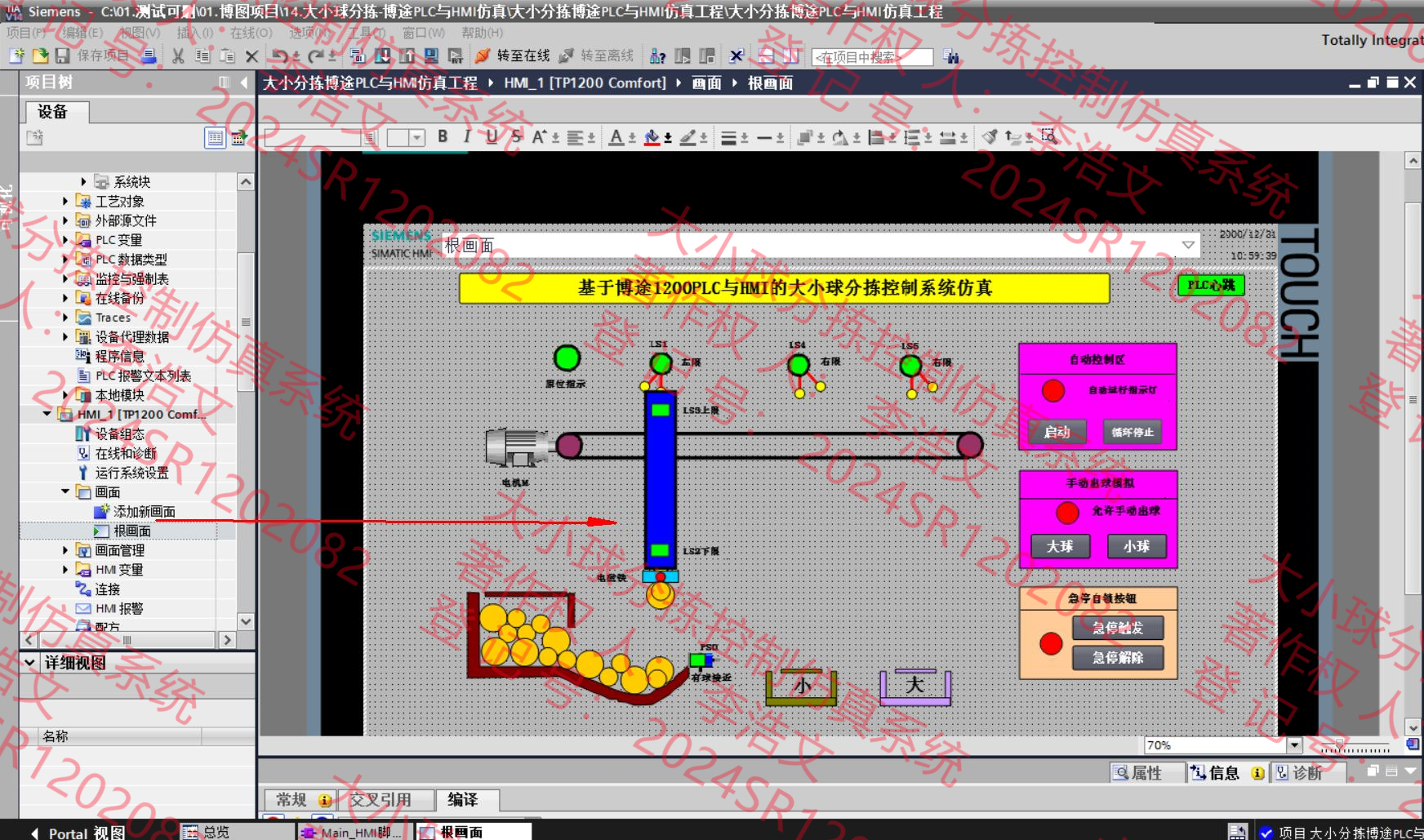
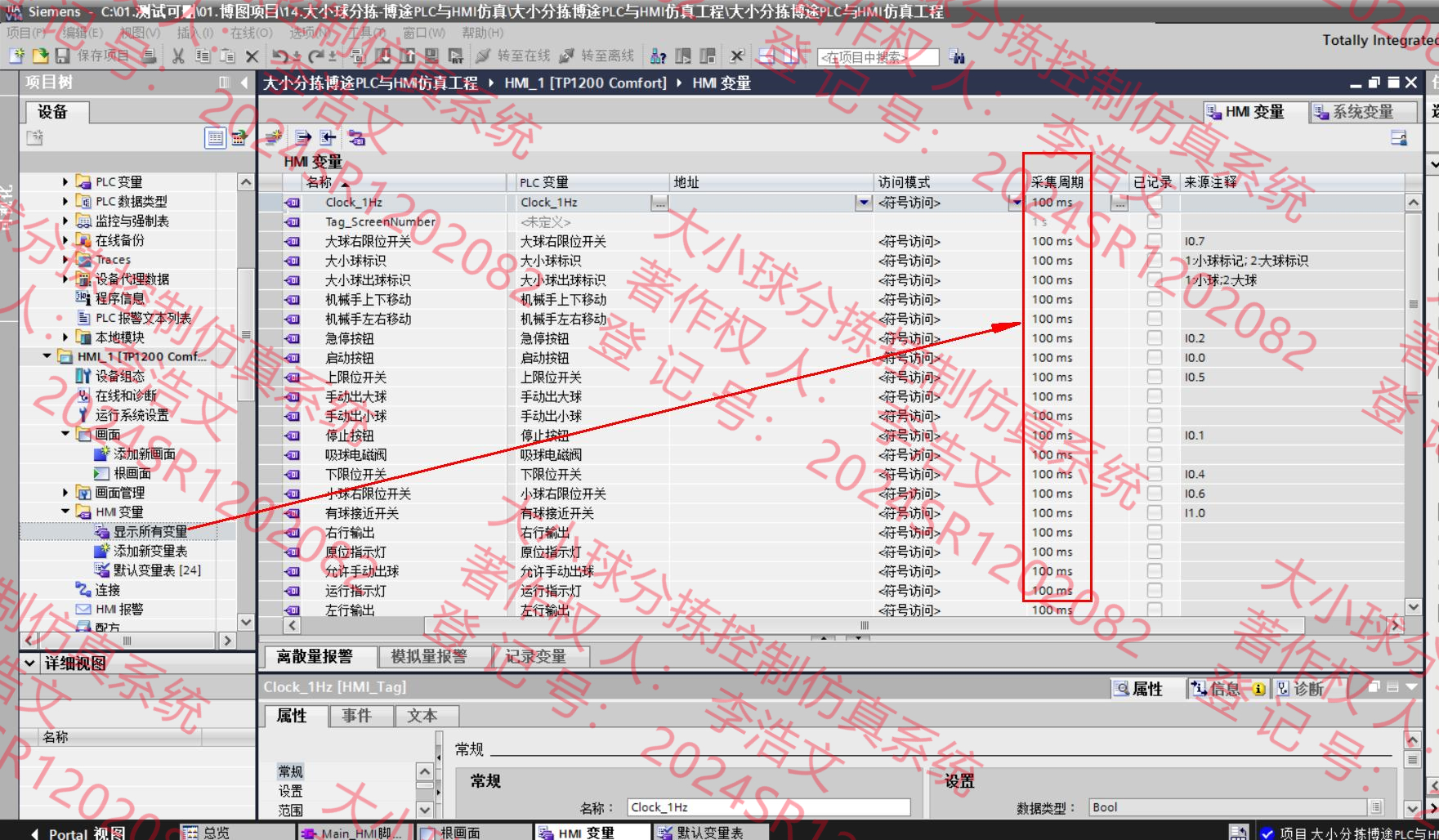
五、博途仿真介绍
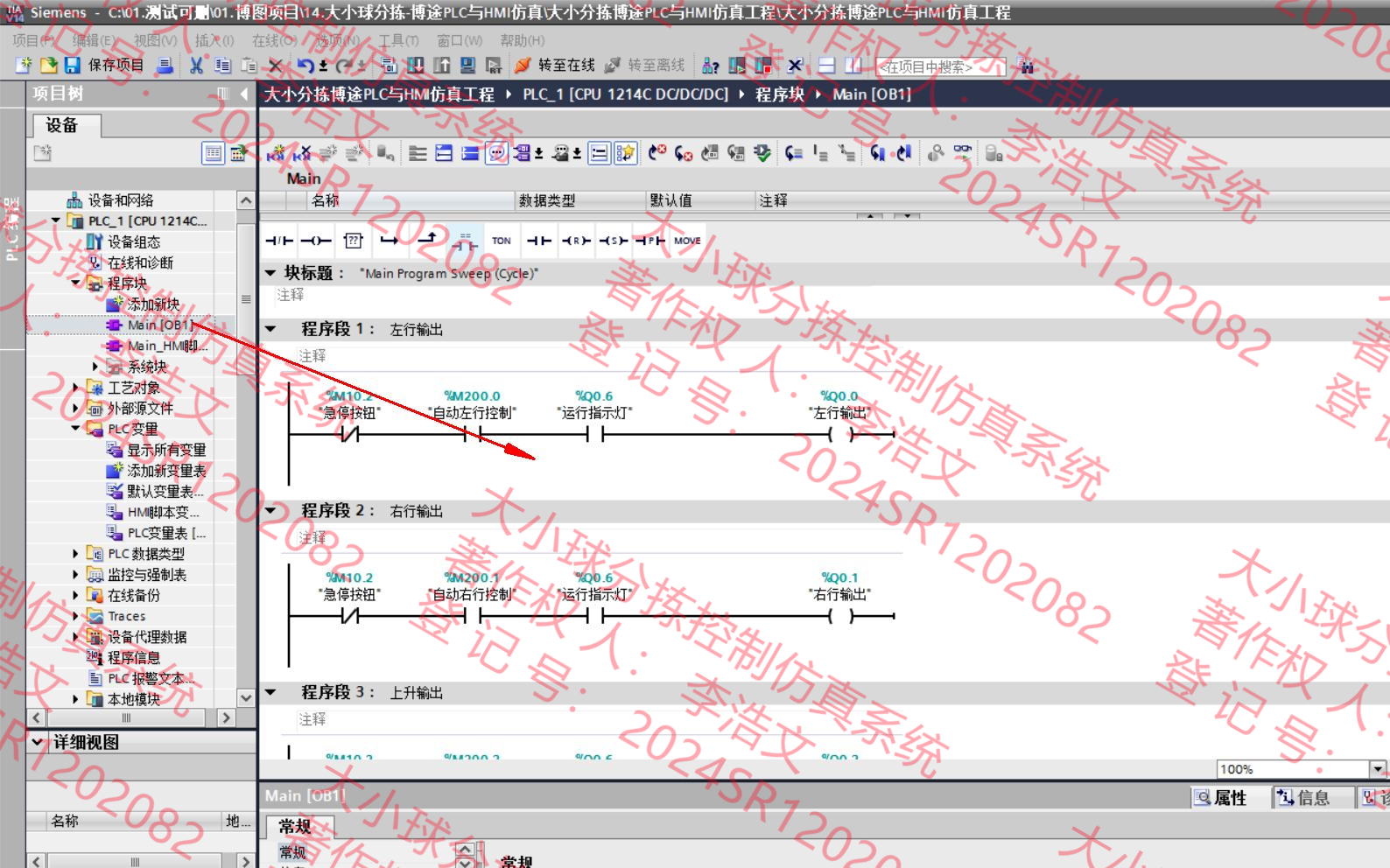
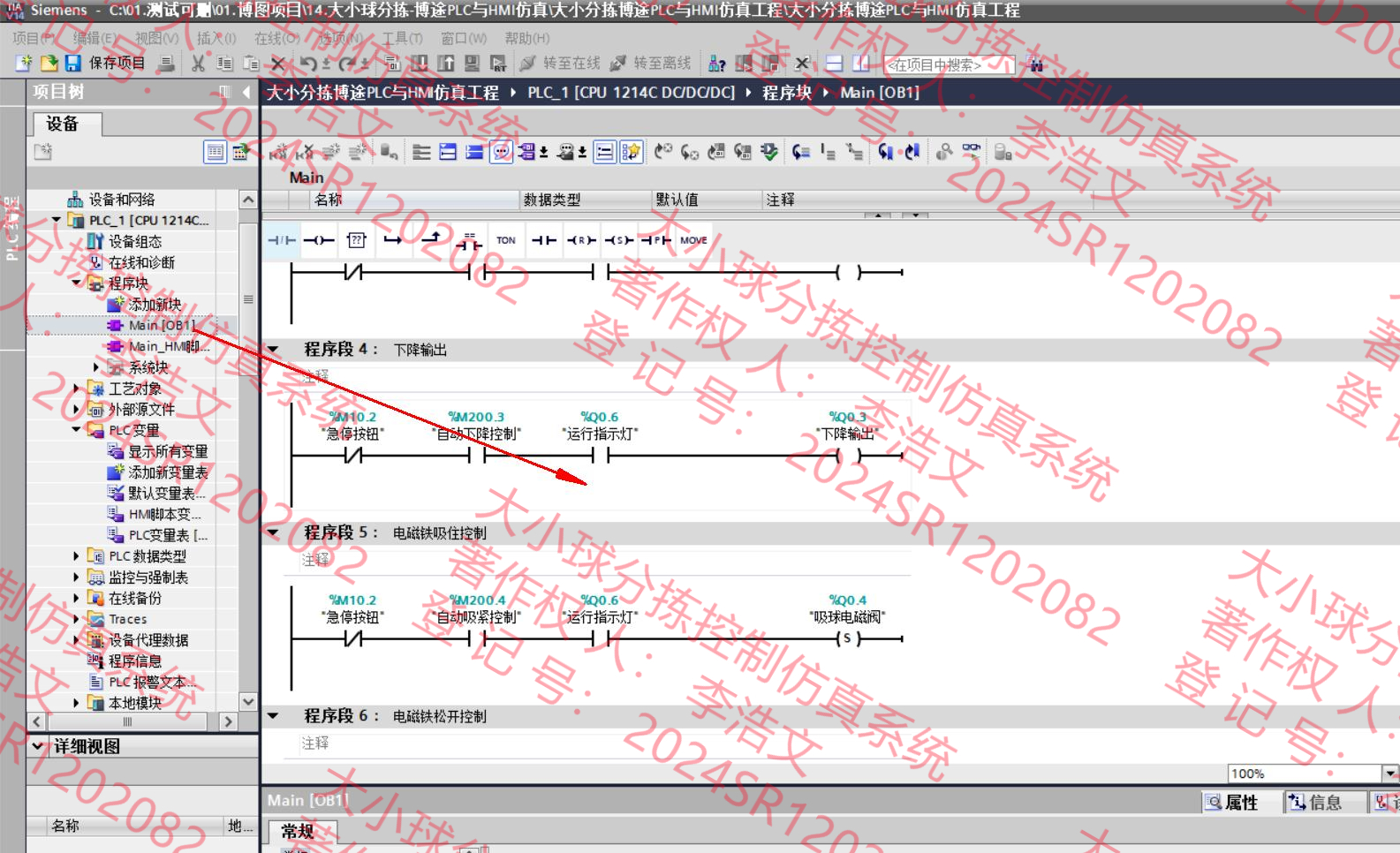
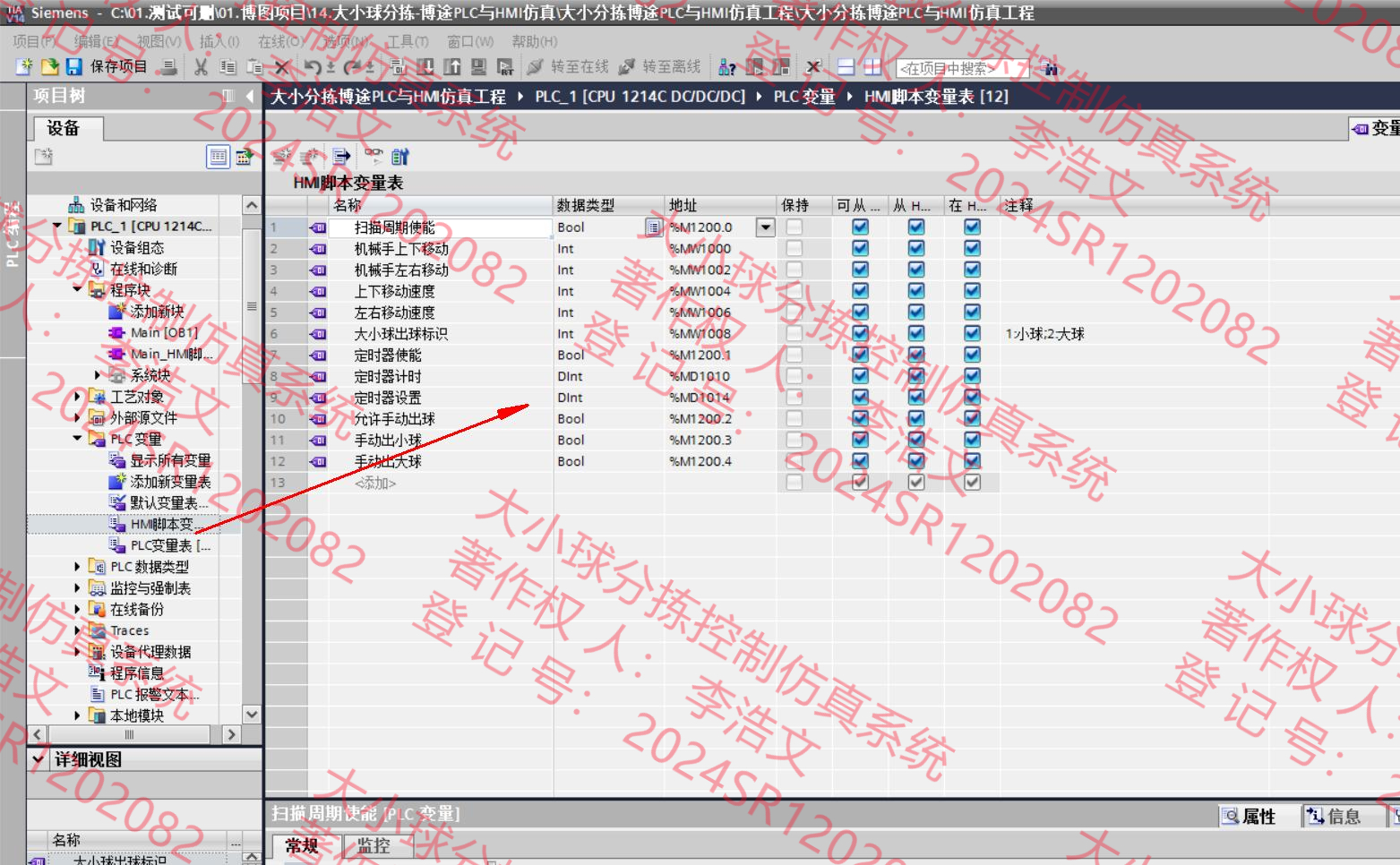
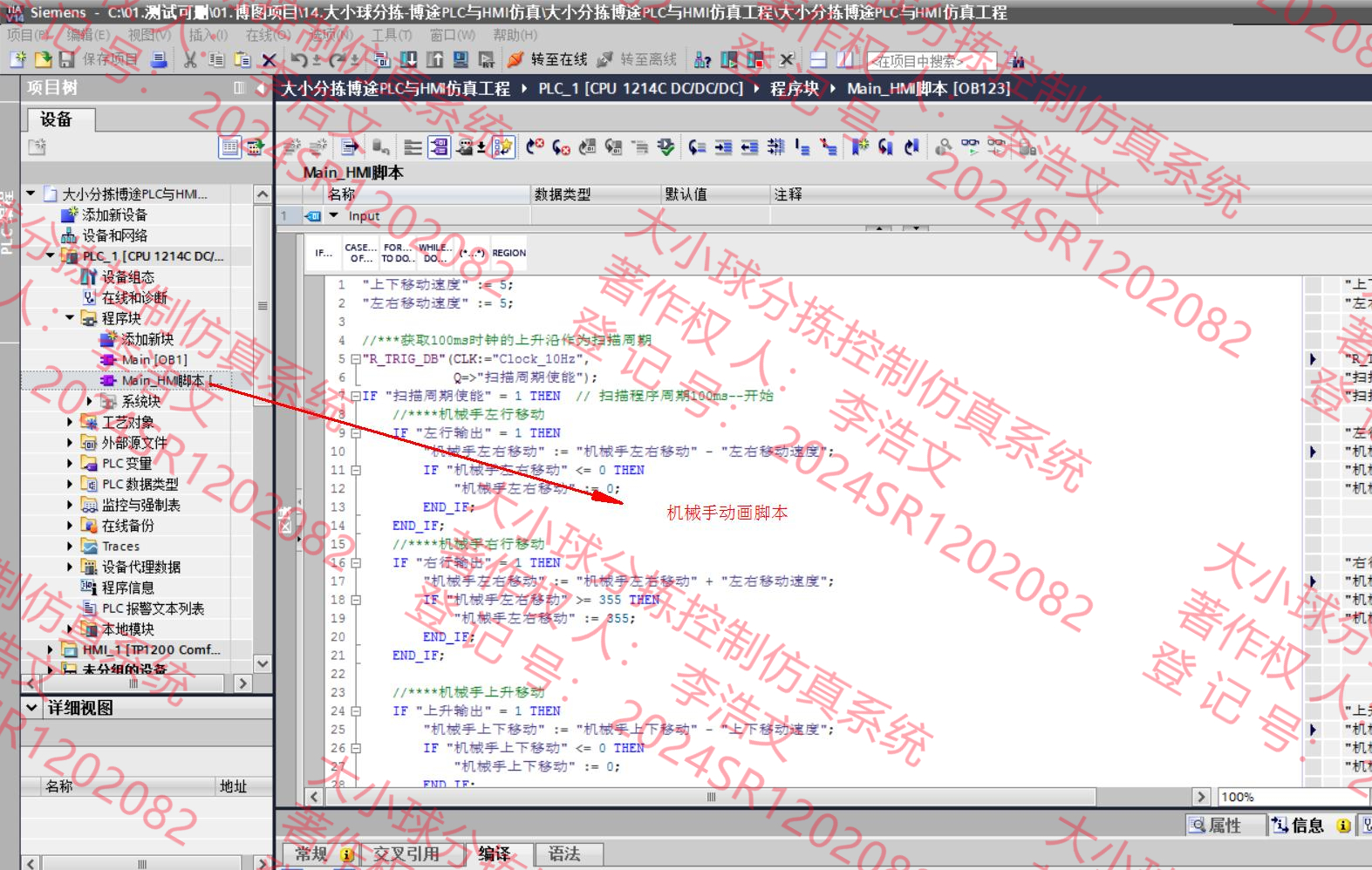
下面对基于博途1200PLC与HMI的大小球分拣控制系统仿真工程过程介绍:

===============================
六 、图纸文件
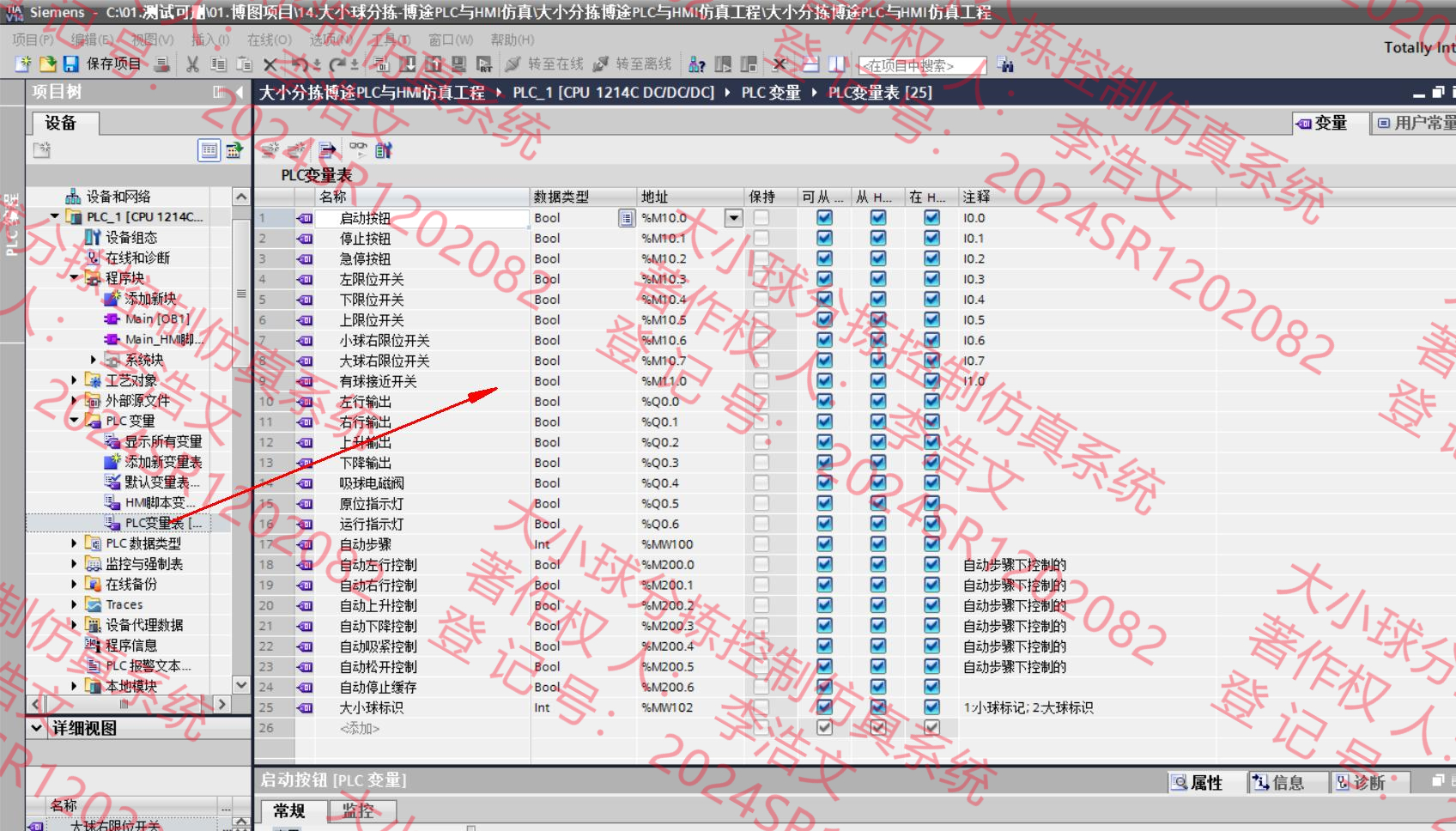
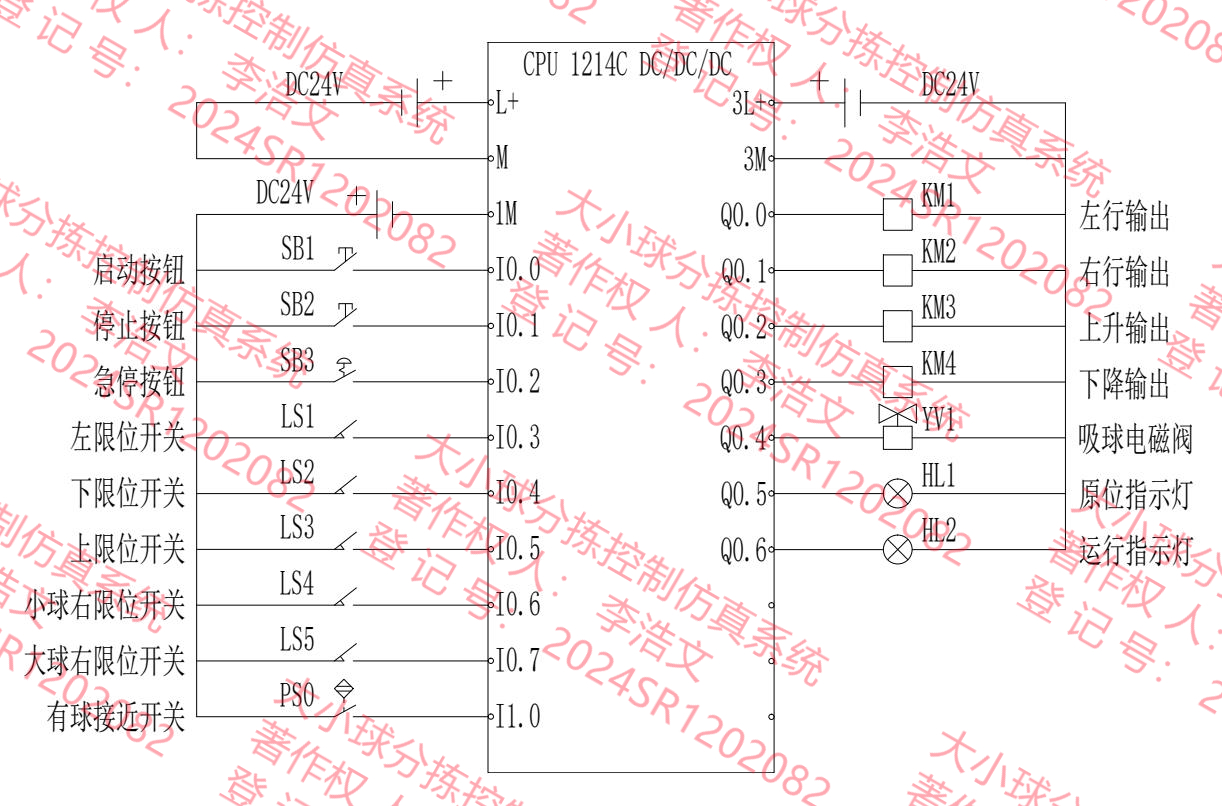
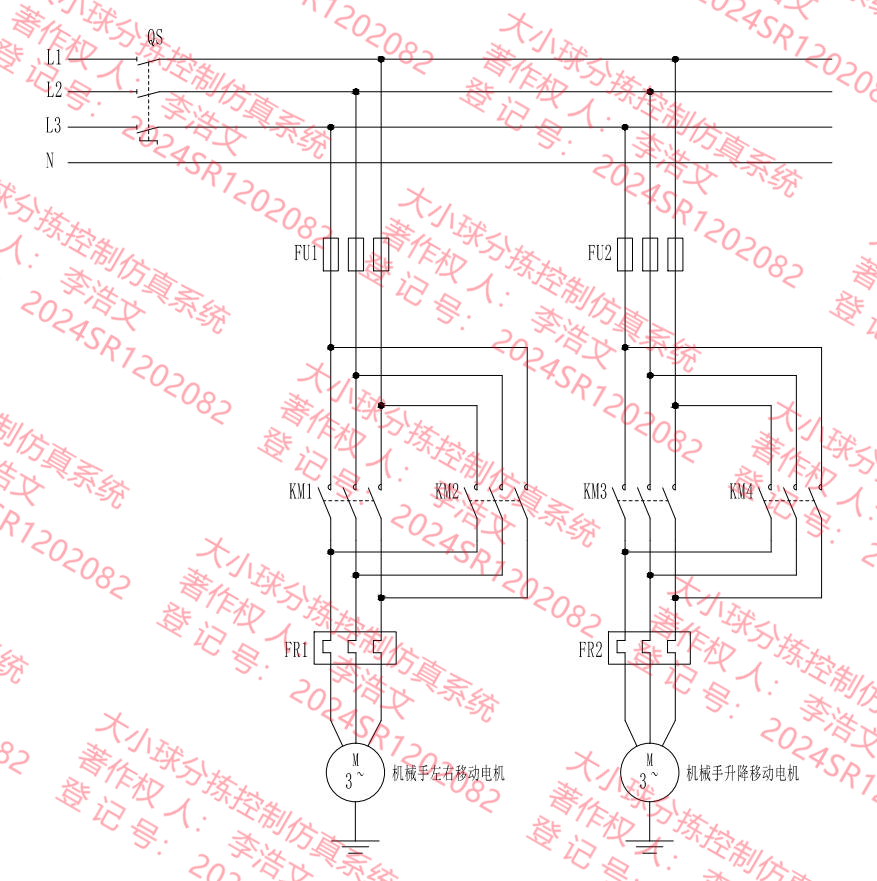
大小球分拣配套的IO点表+PLC接线图+主电路图+控制流程图 (CAD源文件可编辑的)。
PLC接线图、主电路图与控制流程图是CAD画的;

===============================

















 1926
1926

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









