







 本文介绍了深度学习中的图像分割技术,包括语义分割、实例分割和全景分割的基本概念和区别。语义分割是将图像像素分类,实例分割则区分同类物体的不同个体,全景分割结合两者。基于卷积神经网络的模型是实现语义分割的主要方法,常用评价指标为mIoU。博主分享了学习资源,并邀请读者交流讨论。
本文介绍了深度学习中的图像分割技术,包括语义分割、实例分割和全景分割的基本概念和区别。语义分割是将图像像素分类,实例分割则区分同类物体的不同个体,全景分割结合两者。基于卷积神经网络的模型是实现语义分割的主要方法,常用评价指标为mIoU。博主分享了学习资源,并邀请读者交流讨论。

>>>深度学习Tricks,第一时间送达<<<
目录
🐱🏍 写在前面 ✨
小海带近期对语义分割算法比较感兴趣,今后会不断学习以及更新深度学习图像分割领域的知识,感兴趣的小伙伴可以一起讨论交流哇!关于计算机视觉以及YOLO算法改进方面也会偶尔更新一下下,需要代码咨询的小伙伴可以随时给小海带留言喔 ~ 🤞 💕
一、前言
语义分割初认识——语义分割 (Semantic segmentation) 是指将图像中的每个像素链接到类标签的过程。这些标签可能包括人、车、道路、建筑、花、家具等等。
二、深度学习的图像分割分类
深度学习的图像分割按分割目的可分为语义分割、实例分割以及全景分割三类:
1.语义分割
语义分割(Semantic Segmentation)是对图像中每个像素进行分类,从而将图像分割成几个含有不同类别信息的区域。
2.实例分割
实例分割(Instance Segmentation)是在语义分割的基础上将同类物体中的不同个体的像素区分开。
3.全景分割
全景分割(Panoptic Segmentation)则是语义分割和实例分割的结合。不同于实例分割只对图像中的物体进行检测和分割,全景分割是对图中的所有物体包括背景都进行检测和分割。
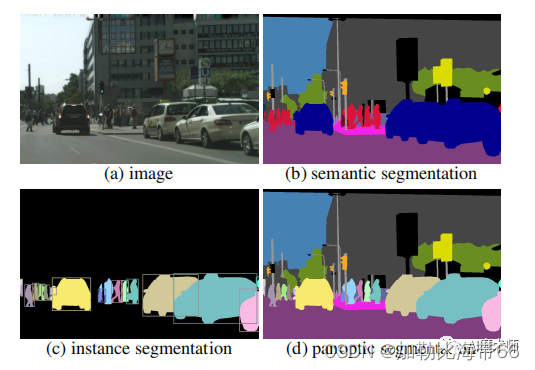
语义分割、实例分割和全景分割三者的区别
三、语义分割的基本原理
基于卷积神经网络的语义分割模型是语义分割的主要方法。
语义分割的原理可概括为:以尺寸为的RGB图像作为语义分割模型的输入,其中
代表图像的高,
代表图像的宽,3代表RGB三个颜色通道。语义分割模型对输入交替进行卷积操作、池化操作以及上采样操作,从而得到尺寸为
的输出,其中
代表分类的类别数。在输出的空间维度
上的每一个元素都是含有
个数值的一维向量,若其中的第
个数值最大,则表示该元素对应的像素更可能属于第
类。通过选出每个向量中最大值对应的类别数,可将该输出转变为尺寸为
的逐像素标签。进一步对每一类像素标签用特定的颜色表示,即可得到输入图像的语义分割结果。
四、语义分割的常用运算及评价指标
语义分割模型会对输入图像交替进行卷积运算、池化运算、以及转置卷积运算,从而将输入图像转变为逐像素标签。在模型的训练过程中,需要依据损失函数来不断更新模型参数,语义分割任务中常用的损失函数是交叉熵损失函数。语义分割任务采用mIoU(mean Intersection over Union)这一指标来衡量语义分割模型的分割性能。
学习内容来源于:入门|深度学习中的语义分割




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











