







 本文介绍了Pieper准则在机械臂逆运动学中的应用,通过PUMA560为例,详细解析了如何利用此准则简化逆解运算。从六自由度机械臂的结构分析,到逆运动学的具体求解步骤,包括Pieper准则的提出背景和其在现代机械臂设计中的实际意义。
本文介绍了Pieper准则在机械臂逆运动学中的应用,通过PUMA560为例,详细解析了如何利用此准则简化逆解运算。从六自由度机械臂的结构分析,到逆运动学的具体求解步骤,包括Pieper准则的提出背景和其在现代机械臂设计中的实际意义。
👨🏫🥰🥳需要机械臂相关资源的同学可以在评论区中留言哦🤖😽🦄

指南目录📖:
机械臂速成小指南(二十三):Paul方法求解机械臂运动学逆解(含matlab代码)
🦾🌏🪐以下为正文🦾🌏🪐
Pieper准则是Pieper.D.L于1968年在其论文“THE KINEMATICS OF MANIPULATORS UNDER COMPUTER CONTROL”中提出的用于判别机械臂逆运动学问题是否存有封闭解的准则,是存在封闭逆解的充分条件,具体内容为:
当如下条件之一满足时,一个6自由度运动学结构具有闭合形式的运动学逆解:
1、三个连续的转动关节的轴相交于同一点
2、三个连续的转动关节的轴平行
(我看有篇论文里说Duffy在论文“Analysis of mechanisms and robot manipulators”中证明了3个连续关节轴平行的6自由度机械臂逆运动学可解,不太清楚这个条件到底是他俩谁先提出来的。)
为简化逆解的运算,现今的机械臂厂家生产的机械臂大多满足这一准则,几乎都有三根相交轴,如常见的PUMA560:
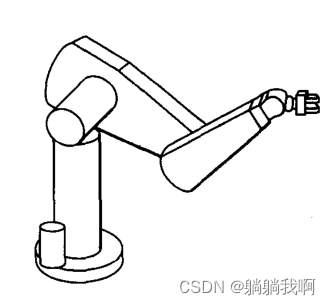
PUMA560是一款具有球形腕的机械臂,其关节4、5、6的旋转轴相交于第五个关节坐标系的原点处,我们在逆运动学求解的过程中,通常也会选择该点作为求解的切入点:该点的位置可以表示为给定末端执行器的位置和方向的函数,同时还可以表示为数量被约简的关节变量的函数。这等价于将逆运动学问题表示为两个子问题,因为位置解和方向解被解耦了。
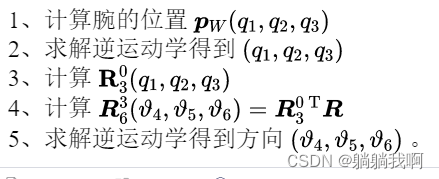
具体求解过程可以为:
Pieper论文的摘要:
The kinematics of manipulators is studied. A model is presented which allows for the systematic description of new and existing manipulators. Six degree-of-freedom manipulators are studied. Several solutions to the problem of finding the manipulator configuration leading to a specified position and orientation are presented. Numerical as well as explicit solutions are given. The problem of positioning a multilink digital arm is also discussed. Given the solution to the position problem, a set of heuristics is developed for moving a six degree-of-freedom manipulator from an initial position to a final position through a space containing obstacles. This results in a computer program shown to be able to direct a manipulator around obstacles.



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











