






前言
等待学位证发放的时间入坑了k210芯片,经过了一段时间学习,现在拿出来分享。如题目所示我会将这些部分总结。非常感谢这个k210项目 ,本文大体上是对这个项目的一些延申。
训练部分
环境配置
首先必须假设你有一些相应的基础(包括学习过maixpy文档,对常见目标检测算法训练有过了解,对linux命令行有过了解等等基础)。
本文主要训练平台为autodl环境配置如下
确保安装了tensorflow2.3以上版本
本文使用了相关的k210项目,项目地址如下:
yolo k210
下载解压后进入主目录
首先需要修改requirements.txt文件
numpy==1.19.2
scikit-learn
imgaug==0.4
opencv-python~=4.5
matplotlib~=3.4
tqdm
pascal_voc_writer
tf2onnx
运行(建议一个一个运行)
pip install -r requirements.txt
如果环境报错建议查阅文档。
为了方便使用将axelerate目录下的train.py放到主目录
数据集划分
将训练集与测试集的图片与标签放在sample_datasets/detector文件夹中,这里的标签格式是voc格式,具体如下:
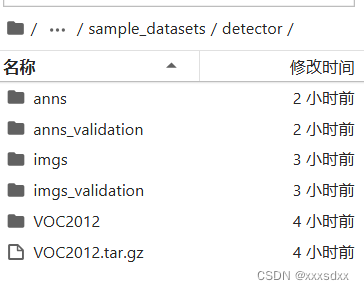
anns与imgs中放入训练集,anns_validation与imgs_validation中放入测试集(这里测试集与验证集合一了)。VOC2012是总的还没有分开的数据集,这里通过split.py进行数据集划分
import os
import shutil
import random
# 设置源文件夹和目标文件夹
src_img_dir = r'/root/autodl-tmp/aXeleRate-master/sample_datasets/detector/VOC2012/JPEGImages'
src_label_dir = r'/root/autodl-tmp/aXeleRate-master/sample_datasets/detector/VOC2012/Annotations'
dst_train_img_dir = r'/root/autodl-tmp/aXeleRate-master/sample_datasets/detector/imgs'
dst_train_label_dir = r'/root/autodl-tmp/aXeleRate-master/sample_datasets/detector/anns'
dst_val_img_dir = r'/root/autodl-tmp/aXeleRate-master/sample_datasets/detector/imgs_validation'
dst_val_label_dir = r'/root/autodl-tmp/aXeleRate-master/sample_datasets/detector/anns_validation'
# 创建目标文件夹
for dir_path in [dst_train_img_dir, dst_train_label_dir, dst_val_img_dir, dst_val_label_dir]:
if not os.path.exists(dir_path):
os.makedirs(dir_path)
# 获取所有图片和标签文件名
img_files = os.listdir(src_img_dir)
label_files = os.listdir(src_label_dir)
# 创建图片和标签的映射关系
img_label_map = {}
for img_file in img_files:
base_name = os.path.splitext(img_file)[0]
for label_file in label_files:
if os.path.splitext(label_file)[0] == base_name:
img_label_map[img_file] = label_file
break
# 确保图片和标签一一对应
assert len(img_label_map) == len(img_files) == len(label_files)
# 将数据划分为训练集和验证集
num_samples = len(img_label_map)
val_ratio = 0.2 # 验证集占总样本的比例
val_size = int(num_samples * val_ratio)
img_files = list(img_label_map.keys())
random.shuffle(img_files)
val_img_files = img_files[:val_size]
train_img_files = img_files[val_size:]
# 移动图片和标签到目标文件夹
for img_file in val_img_files:
src_img_path = os.path.join(src_img_dir, img_file)
src_label_path = os.path.join(src_label_dir, img_label_map[img_file])
dst_img_path = os.path.join(dst_val_img_dir, img_file)
dst_label_path = os.path.join(dst_val_label_dir, img_label_map[img_file])
shutil.move(src_img_path, dst_img_path)
shutil.move(src_label_path, dst_label_path)
for img_file in train_img_files:
src_img_path = os.path.join(src_img_dir, img_file)
src_label_path = os.path.join(src_label_dir, img_label_map[img_file])
dst_img_path = os.path.join(dst_train_img_dir, img_file)
dst_label_path = os.path.join(dst_train_label_dir, img_label_map[img_file])
shutil.move(src_img_path, dst_img_path)
shutil.move(src_label_path, dst_label_path)
print(f"Data split complete. {val_size} samples in validation set, {num_samples - val_size} samples in training set.")
划分后得到了训练集和测试集,接下来要修改配置文件
修改json配置文件
在configs目录下新建一个.json文件用于配置训练时候的参数,configs文件中有许多json配置文件,建议参考。
{
"model" : {
#网络功能(Detector表示检测)也有分类与分割
"type": "Detector",
#使用的backbone模型,['Full Yolo', 'Tiny Yolo', 'MobileNet1_0', 'MobileNet7_5', 'MobileNet5_0', 'MobileNet2_5', 'SqueezeNet', 'NASNetMobile', 'ResNet50', 'DenseNet121']
"architecture": "MobileNet7_5",
#输入尺寸 这里需要注意如果你的k210板子摄像头像素320x240
#建议修改为 "input_size": [224, 320]
"input_size": 224,
# anchor部分,如果想要yolo最后输出两个通道,那么建议设置为2x3x2的维度,也就是六个anchor坐标
"anchors": [[[0.76120044, 0.57155991], [0.6923348, 0.88535553], [0.47163042, 0.34163313]]],
# 类别部分,与数据集类别对应
"labels": ["person", "bird", "cat", "cow", "dog", "horse", "sheep", "aeroplane", "bicycle", "boat", "bus", "car", "motorbike", "train","bottle", "chair", "diningtable", "pottedplant", "sofa", "tvmonitor"],
# 一些置信度 iou 之类的参数,调参使用
"obj_thresh" : 0.5,
"iou_thresh" : 0.5,
"coord_scale" : 2.0,
"object_scale" : 2.0,
"no_object_scale" : 1.0
},
# 预训权重,full表示整个网络的,如果没有可以不填,如果有可以换上权重目录
# backend 表示backbone部分的权重,部分模型没有,如果有的话在训练时会自动联网下载,也可以提前下载下来
"weights" : {
"full": "",
"backend": "imagenet"
},
"train" : {
# actual_epoch训练批次
"actual_epoch": 100,
# 训练集与验证集的目录
"train_image_folder": "/root/autodl-tmp/aXeleRate-master/sample_datasets/detector/imgs",
"train_annot_folder": "/root/autodl-tmp/aXeleRate-master/sample_datasets/detector/anns",
# 这个参数建议看源码
"train_times": 1,
"valid_image_folder": "/root/autodl-tmp/aXeleRate-master/sample_datasets/detector/imgs_validation",
"valid_annot_folder": "/root/autodl-tmp/aXeleRate-master/sample_datasets/detector/anns_validation",
"valid_times": 1,
# 注意这里每个模型的valid_metric不一样,建议参考例子json,或者训练时候打印一下valid_metric
"valid_metric": "recall",
#batchsize
"batch_size": 32,
#学习率
"learning_rate": 1e-3,
# 保存的目录
"saved_folder": "pascal",
# 没用
"first_trainable_layer": "",
# 是否图像强化
"augmentation": true,
# 应该是不训练只检测,没试过
"is_only_detect" : false
},
"converter" : {
#这里如果要生成.tflite与kmodel需要加上,因为k210需要烧录.kmodel文件
"type": ["k210", "tflite"]
}
}
修改完后就可以训练了
训练
上面已经将train.py放到了主目录,运行
python3 train.py -c configs/你的json文件.json
或者修改train.py文件中的
改为你的json文件
运行后会下载一些东西,例如ncc与一些预训练权重,需要等待一下。然后就可以看到训练过程了
如果报错
AttributeError: module ‘tensorflow.keras.optimizers’ has no attribute ‘legacy’
可能由于tensorflow库函数变动,建议删除legacy部分
例如
tf.keras.optimizers.legacy.Adam
改为
tf.keras.optimizers.Adam
然后等待训练完成
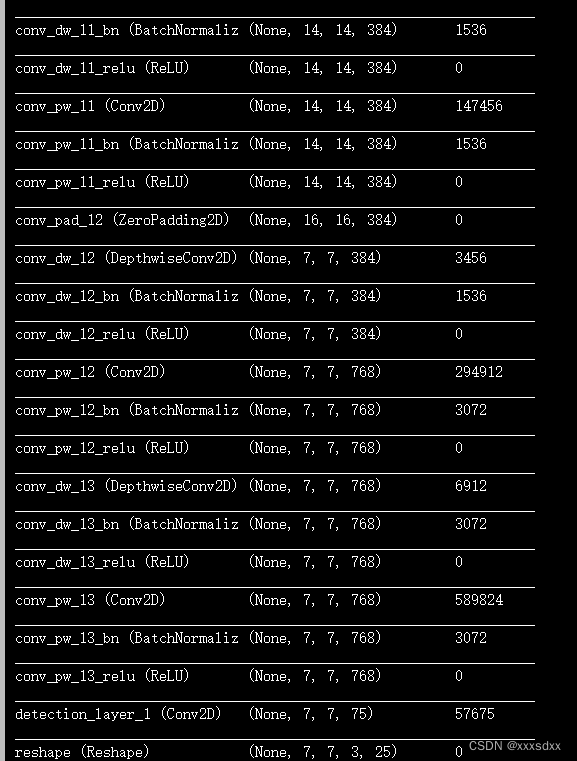
注意要记录一下网络结构图,也就是训练一开始弹出的
可以在终端中看到训练过程中损失之类的变化

训练完成或者ctrl+c结束会自动调用ncc生成kmodel文件,等待kmodel生成。
结束后会在projects目录下生成.kmodel文件
将kmodel文件下载下来即可
部署部分
烧录固件
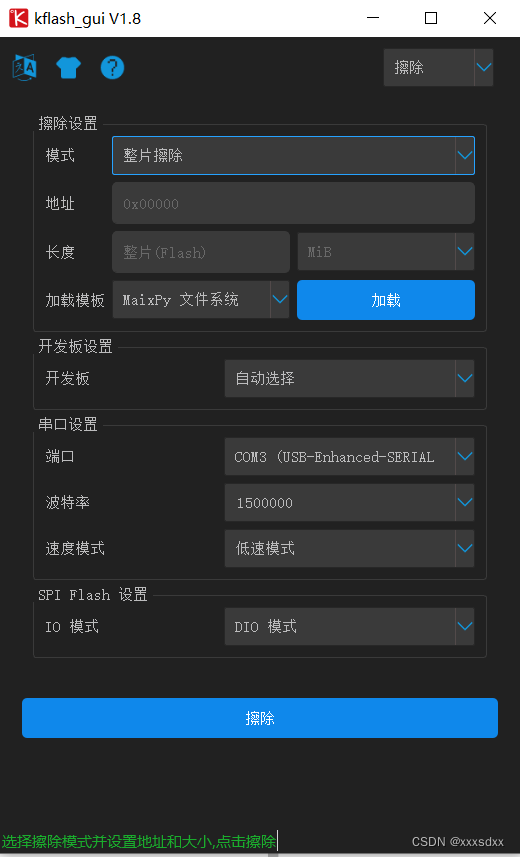
还是默认已经知道怎么使用k210开发板了,这里使用了项目作者的一个固件库而不使用官方提供的(官方的经过修改应该也可以,但我没试过,如果是官方的建议使用mini版本,因为完整版太大运行占用很多内存)maixpy.bin
使用kflash擦除并且烧录maixpy.bin
在.kmodel文件目录下新建一个json文件,描述模型的地址

json文件内容为模型的地址,一半为0x500000或者0x300000
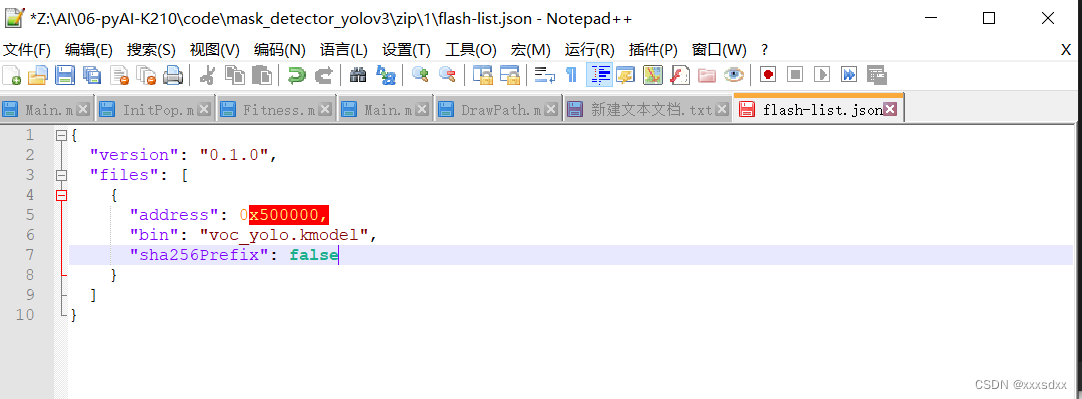
将两个文件一起压缩为zip格式,然后修改后缀名为kfpkg

使用kflash烧录该kfpkg文件
运行模型
项目提供的固件支持IDE,所以本文使用MaixPY IDE进行运行,或者可以采用其他方式,maixpy文档中有介绍。运行代码如下
#tested with frimware 5-0.22
import sensor,image,lcd
import KPU as kpu
lcd.init()
#lcd.rotation(2)
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.set_vflip(1)
sensor.run(1)
classes = ["person", "bird", "cat", "cow", "dog", "horse", "sheep", "aeroplane", "bicycle", "boat", "bus", "car", "motorbike", "train","bottle", "chair", "diningtable", "pottedplant", "sofa", "tvmonitor"]
task = kpu.load(0x500000) #change to "/sd/name_of_the_model_file.kmodel" if loading from SD card
a = kpu.set_outputs(task, 0, 7, 7, 75) #the actual shape needs to match the last layer shape of your model(before Reshape)
#a = kpu.set_outputs(task, 0, 14, 14, 75) #the actual shape needs to match the last layer shape of your model(before Reshape)
anchor = (0.76120044, 0.57155991, 0.6923348, 0.88535553, 0.47163042, 0.34163313)
a = kpu.init_yolo3(task, 0.3, 0.3, 3,1, anchor) #tweak the second parameter if you're getting too many false positives
while(True):
img = sensor.snapshot()
img_copy = img.resize(224,224)
a = img_copy.pix_to_ai()
code = kpu.run_yolo3(task, img_copy)
if code:
for i in code:
a = img.draw_rectangle(i.rect(),color = (0, 255, 0))
a = img.draw_string(i.x(), i.y() - 22, classes[i.classid()], color=(255,0,0), scale=1.5)
a = lcd.display(img)
else:
a = lcd.display(img)
a = kpu.deinit(task)
现在来详细介绍这个代码中需要注意的事项
1、该部分修改为你烧录的地址,也就是json文件中的
task = kpu.load(0x500000) #change to "/sd/name_of_the_model_file.kmodel" if loading from SD card
2、特征层输出
a = kpu.set_outputs(task, 0, 7, 7, 75)
这里为重中之重,这里的五个参数分别为
task: 模型地址
0:表示第几个输出,这里0表示输出0
7:模型的宽(这里也就是上面的网络结构图中最终输出的宽高)
7:模型的高
==如果是224x224 那宽高都为7,如果为[224, 320]那么需要修改为a = kpu.set_outputs(task, 0, 10, 8, 21) ==
75:通道数,计算方法(类别数量+5)*anchor数量,例如这里类别20,anchor为3,那么(20+5)*3=75
3、该部分为类别数量
classes = ["person", "bird", "cat", "cow", "dog", "horse", "sheep", "aeroplane", "bicycle", "boat", "bus", "car", "motorbike", "train","bottle", "chair", "diningtable", "pottedplant", "sofa", "tvmonitor"]
4、该部分为anchor
anchor = (0.76120044, 0.57155991, 0.6923348, 0.88535553, 0.47163042, 0.34163313)
5、注意这里使用的是init_yolo3并且参数与官方的init_yolo2不同
a = kpu.init_yolo3(task, 0.3, 0.3, 3,1, anchor) #tweak the second parameter if you're getting too many false positives
6、这里要注意,如果你的模型训练时候设置输入格式为224x224则需要下面两行代码,如果为[224, 320]则不需要并且修改code = kpu.run_yolo3(task, img_copy)中的img_copy为img
img_copy = img.resize(224,224)
a = img_copy.pix_to_ai()
7、也是注意这里与官方不同
code = kpu.run_yolo3(task, img_copy)
运行即可得到结果
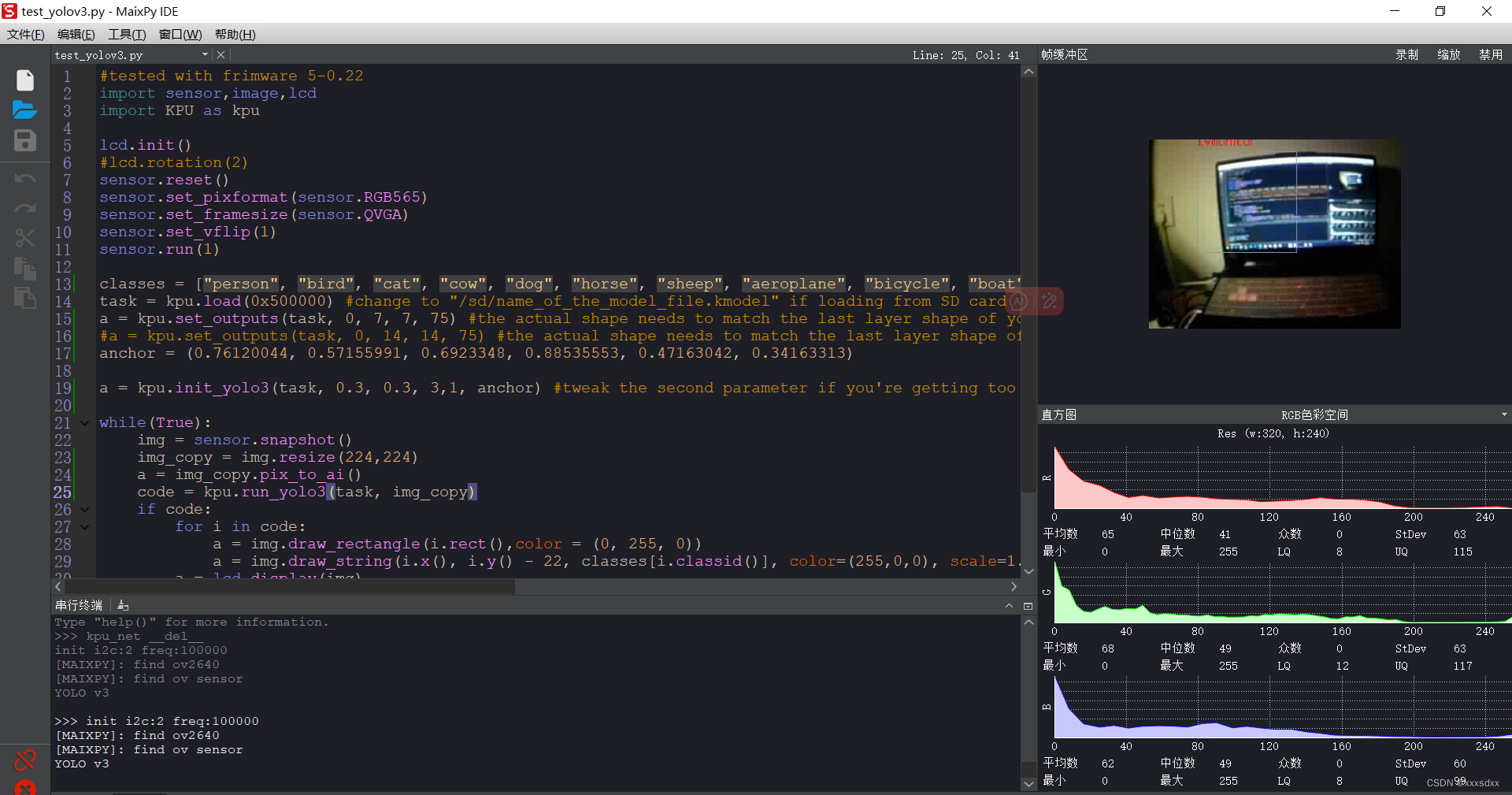
可以看到运行没问题,只是我这里训练的批次有点少,所以检测精度较差
一些小贴士
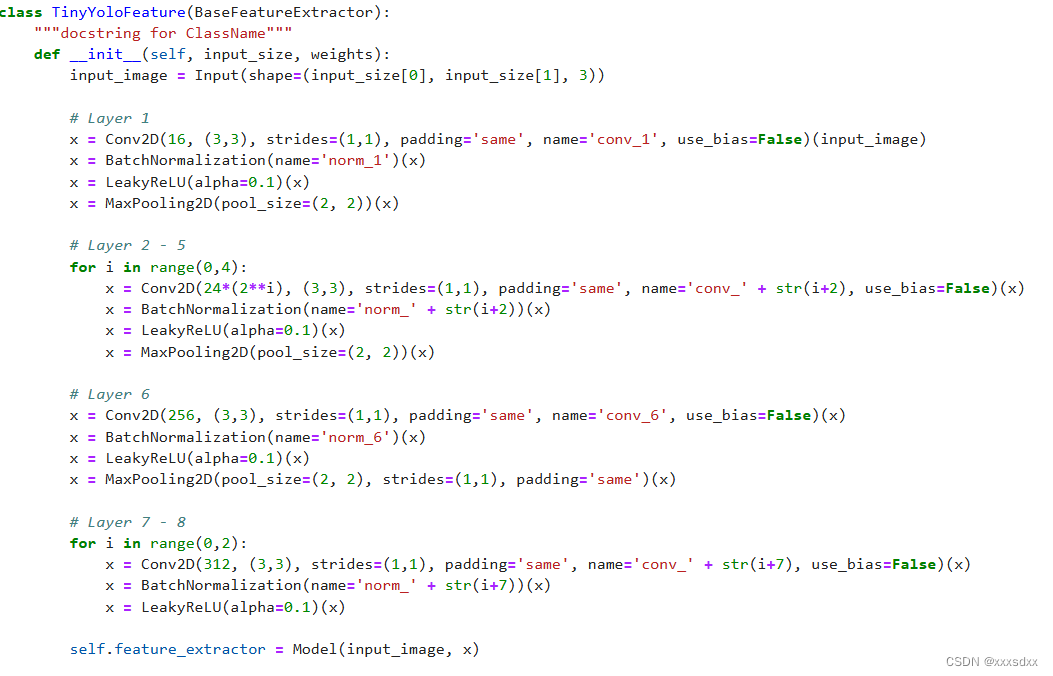
网络魔改
如果你想修改其中的网络结构那么可以修改axelerate\networks\common_utils\feature.py部分,其中有许多模块进行修改即可(做过网络魔改的应该懂)
输出部分
众所周知,yolo大多是三个输出,这里实际上只用到了一个输出,从anchor中也能看出,上面也提到了如果将anchor设置成2x3x2维度即可两个输出,至于三个输出估计占用内存太大,不太适合。如果是两个输出那么IDE中的程序需要进行修改为
a = kpu.set_outputs(task, 0, 7, 7, 75)
a = kpu.set_outputs(task, 1, 14, 14, 75)
anchor与init_yolo3也要进行修改
a = kpu.init_yolo3(task, 0.3, 0.3, 3,1, anchor)
改为a = kpu.init_yolo3(task, 0.3, 0.3, 3,2, anchor)
后记
以上就是我对k210的一些理解,可能语言组织的不好也请见谅。k210也就玩到这里了,如果有人想要二手的k210开发板可以在咸鱼上联系我咸鱼网址,接下来可能会实时rk3588















 7957
7957











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









