






目录
题目
考察要求
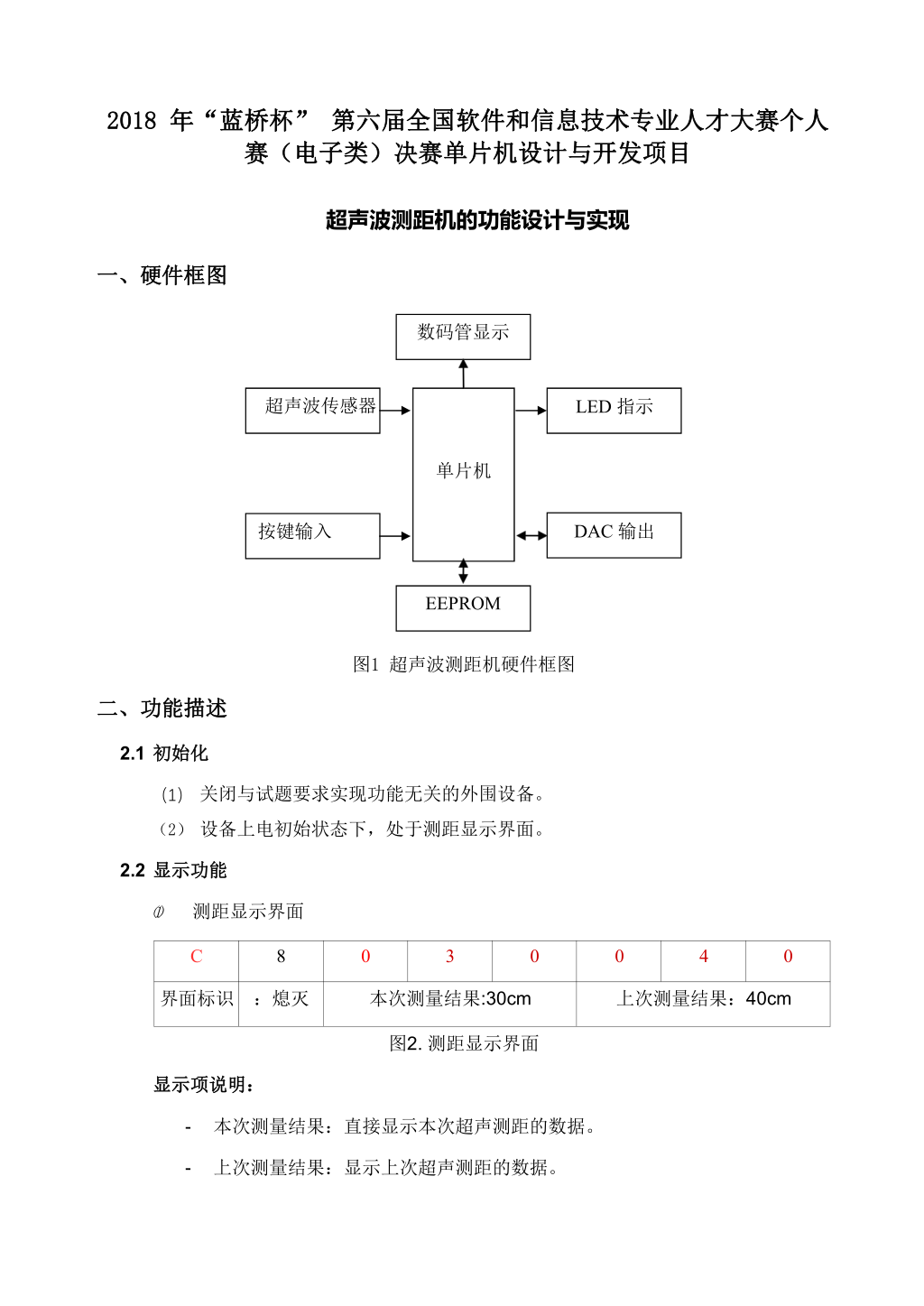
1、超声波模块
超声波发送和接收
void Send_wacv()
{
uchar i=8;
do{
TX=1;
semopon;semopon;semopon;semopon;semopon;semopon;semopon;semopon;
TX=0;
semopon;semopon;semopon;semopon;semopon;semopon;semopon;semopon;
}while(i--);
}
uint Read_DIST()
{
if(dist_flag)
{
dist_flag=0;
Send_wacv();
TR1=1;
while((RX==1)&&(TF1==0));
TR1=0;
if(TF1==1)
{
TF1=0;
ucDist=999;//999-256*3=231 256是eeprom最大存储容量
}else{
t=TH1;
t<<=8;
t|=TL1;
ucDist=(int)(t*0.017);
}
}
TH1=0;
TL1=0;
return ucDist;
}2、独立按键,LED,数码管
不说了,每次都有,提下小灯L1的写法:L1是以一秒为间隔闪烁,闪烁三次后熄灭。可以定义一个变量让它每一秒翻转一次实现小灯闪烁,等到它为5秒时置为0就将其关闭小灯。
//在定时器服务函数写这个
led_count++;
if(led_count%1000==0)
{
led_flag=~led_flag;
}
//小灯函数里面写
if(flag==1&&led_count<6000) //在保存的情况下间隔1s亮灭3次
{
if(led_flag){
LED|=1;
}
else{
LED&=~1;
}
}
else {
led_count=0;
flag=0;
LED&=~1;
}3、eeprom
4、DAC
这两个一起写在iic里面,注意写的时候加延时,因为一直连续写会导致数据错误,读可以不用加延时,也可以加,看你个人。DAC的话注意它是存256个字节。比如我们将999存入eeprom里面,实际存入的只是231,999-256*3=231。读取出来也只是231。还有就是中断记关了,记得开
//Write eeprom
void Write_eeprom(unsigned char add,unsigned char dat)
{
IIC_Start();
IIC_SendByte(0xa0);
IIC_WaitAck();
IIC_SendByte(add);
IIC_WaitAck();
IIC_SendByte(dat);
IIC_WaitAck();
IIC_Stop();
}
unsigned char Read_eeprom(unsigned char add)
{
unsigned char temp;
EA=0;
IIC_Start();
IIC_SendByte(0xa0);
IIC_WaitAck();
IIC_SendByte(add);
IIC_WaitAck();
IIC_Start();
IIC_SendByte(0xa1);
IIC_WaitAck();
temp=IIC_RecByte();
IIC_WaitAck();
IIC_Stop();
EA=1;
return temp;
}
//Write DAC
void Write_DAC(unsigned char dat)
{
IIC_Start();
IIC_SendByte(0x90);
IIC_WaitAck();
IIC_SendByte(0X40);
IIC_WaitAck();
IIC_SendByte(dat);
IIC_WaitAck();
IIC_Stop();
}
代码
1、main
#include<stc15f2k60s2.h>
#include<intrins.h>
#include"iic.h"
#define uchar unsigned char
#define uint unsigned int
#define semopon {_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();}
sbit Buzzer = P0^6;
sbit Relay =P0^4;
//超声波
sbit TX = P1^0;
sbit RX = P1^1;
/************* 本地常量声明 **************/
uchar code t_display[]={ //标准字库
// 0 1 2 3 4 5 6 7 8 9 A B C D E F
0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F,0x77,0x7C,0x39,0x5E,0x79,0x71,
//black - H J K L N o P U t G Q r M y
0x00,0x40,0x76,0x1E,0x70,0x38,0x37,0x5C,0x73,0x3E,0x78,0x3d,0x67,0x50,0x37,0x6e,
0xBF,0x86,0xDB,0xCF,0xE6,0xED,0xFD,0x87,0xFF,0xEF,0x46}; //0. 1. 2. 3. 4. 5. 6. 7. 8. 9. -1
uchar code T_COM[]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80}; //位码
uchar table[]={16,16,16,16,16,16,16,16};
uchar ReadData,Trg,Cont;
bit key_flag;
uchar LED;
//超声波测距
uint t,ucDist,distance;
bit dist_flag;
//功能
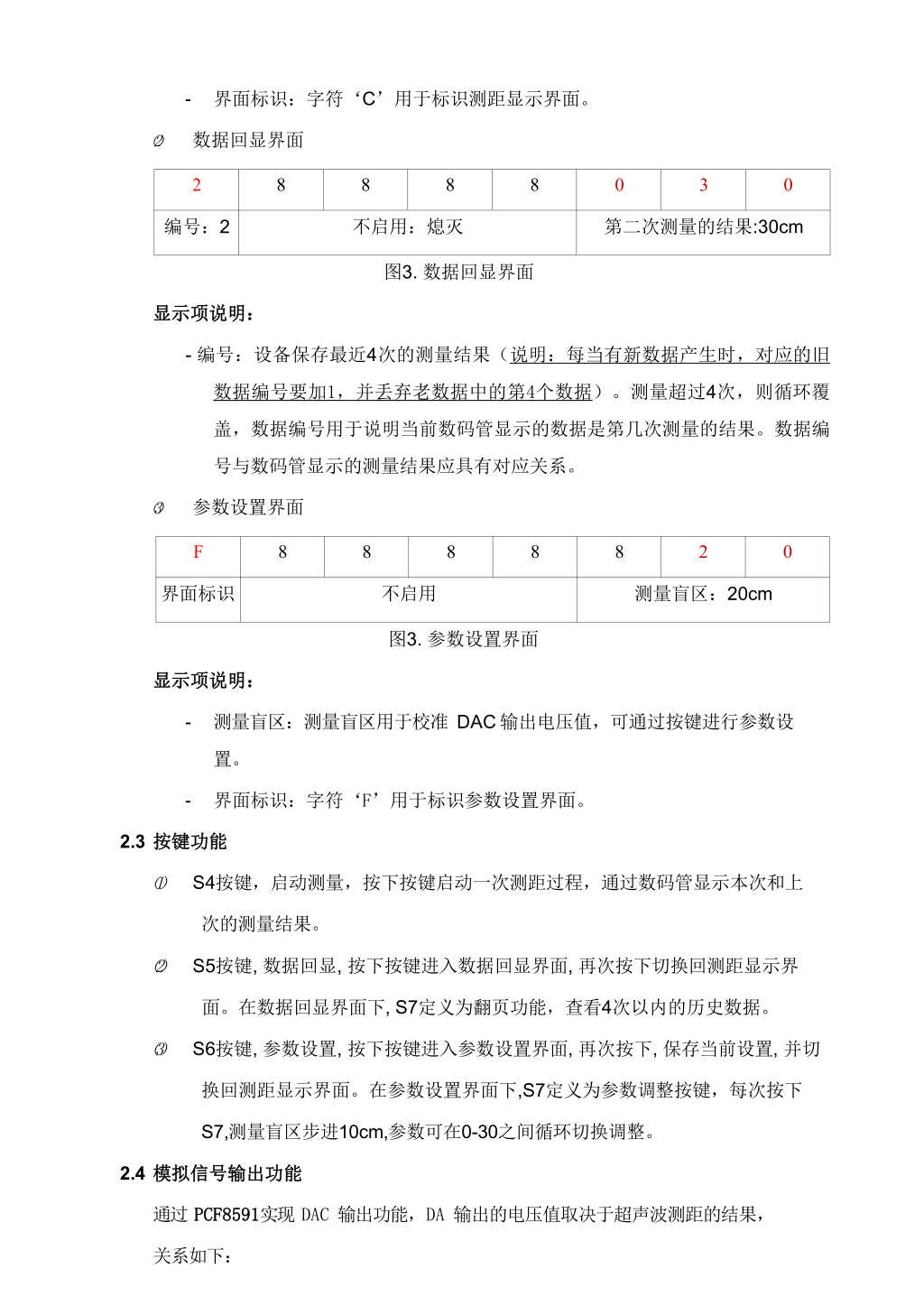
uchar new_distance,old_distance;//本次测量距离和上次测量距离
uchar set_mode;//0为测量距离界面,1为回显界面,2为盲区
uchar eep[4]; //存入测量结果
uchar number;//盲区值
uchar eep_count;//
uchar bh=1;//回显结果编号
bit flag;//测量标志
bit led_flag;
uchar count=0;
uint led_count;
void Delay10ms() //@12.000MHz
{
unsigned char i, j;
i = 117;
j = 184;
do
{
while (--j);
} while (--i);
}
//关闭外设
void allinit()
{
P2=0xa0;Buzzer = 0; Relay = 0;P2=0x00;
P2=0x80;P0=0xff;P2=0x00;
}
void Set_LED()
{
P2=0x80;
P0=~LED;
P2=0x00;
}
void Timer0Init(void) //1毫秒@12.000MHz
{
EA=1;ET0=1;
AUXR |= 0x80; //定时器时钟1T模式
TMOD &= 0xF0; //设置定时器模式
TL0 = 0x20; //设置定时初值
TH0 = 0xD1; //设置定时初值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
}
void Timer0() interrupt 1
{
static uint smg_count,key_count,i,dist_count;
if(++smg_count>=1)
{
smg_count=0;
P2=0xe0;P0=0xff;P2=0x00;
P2=0xc0;P0=T_COM[i];P2=0x00;
P2=0xe0;P0=~t_display[table[i]];P2=0x00;
i++;
if(i>=8)i=0;
}
if(++key_count>=10)
{
key_count=0;
key_flag=1;
}
if(++dist_count>=200)
{
dist_count=0;
dist_flag=1;
}
led_count++;
if(led_count%1000==0)
{
led_flag=~led_flag;
}
}
void Send_wacv()
{
uchar i=8;
do{
TX=1;
semopon;semopon;semopon;semopon;semopon;semopon;semopon;semopon;
TX=0;
semopon;semopon;semopon;semopon;semopon;semopon;semopon;semopon;
}while(i--);
}
uint Read_DIST()
{
if(dist_flag)
{
dist_flag=0;
Send_wacv();
TR1=1;
while((RX==1)&&(TF1==0));
TR1=0;
if(TF1==1)
{
TF1=0;
ucDist=999;//999-256*3=231 255是eeprom最大存储容量
}else{
t=TH1;
t<<=8;
t|=TL1;
ucDist=(int)(t*0.017);
}
}
TH1=0;
TL1=0;
return ucDist;
}
void Write_eep_dist()
{
switch(eep_count)
{
case 0:
Write_eeprom(0x01,distance);Delay10ms();
new_distance=Read_eeprom(0x01); Delay10ms();
old_distance=Read_eeprom(0x04); Delay10ms();
break;
case 1:
Write_eeprom(0x02,distance);Delay10ms();
new_distance=Read_eeprom(0x02); Delay10ms();
old_distance=Read_eeprom(0x01);
break;
case 2:
Write_eeprom(0x03,distance);Delay10ms();
new_distance=Read_eeprom(0x03); Delay10ms();
old_distance=Read_eeprom(0x02);
break;
case 3:
Write_eeprom(0x04,distance);Delay10ms();
new_distance=Read_eeprom(0x04); Delay10ms();
old_distance=Read_eeprom(0x03); Delay10ms();
break;
}
}
void ReadKey()
{
ReadData=P3^0xff;
Trg=ReadData&(ReadData^Cont);
Cont=ReadData;
}
void disp_key()
{
if(key_flag)
{
key_flag=0;
Set_LED();
ReadKey();
switch(Trg)
{
case 0x08:
set_mode=0;
distance=Read_DIST();
Write_eep_dist(); //存入测量结果
eep_count++;
if(eep_count>=4)eep_count=0;
flag=1;
break;
case 0x04:
if(set_mode==1)
{
set_mode=0;
}else{
set_mode=1;
}
break;
case 0x02:
if(set_mode==2)
{
Write_eeprom(0x06,number);
Delay10ms();
set_mode=0;
}else{
set_mode=2;
}
break;
case 0x01:
if(set_mode==1)
{
bh++;
if(bh>=5)bh=1;
}else if(set_mode==2)
{
number+=10;
if(number>=40)number=0;
}
break;
}
}
}
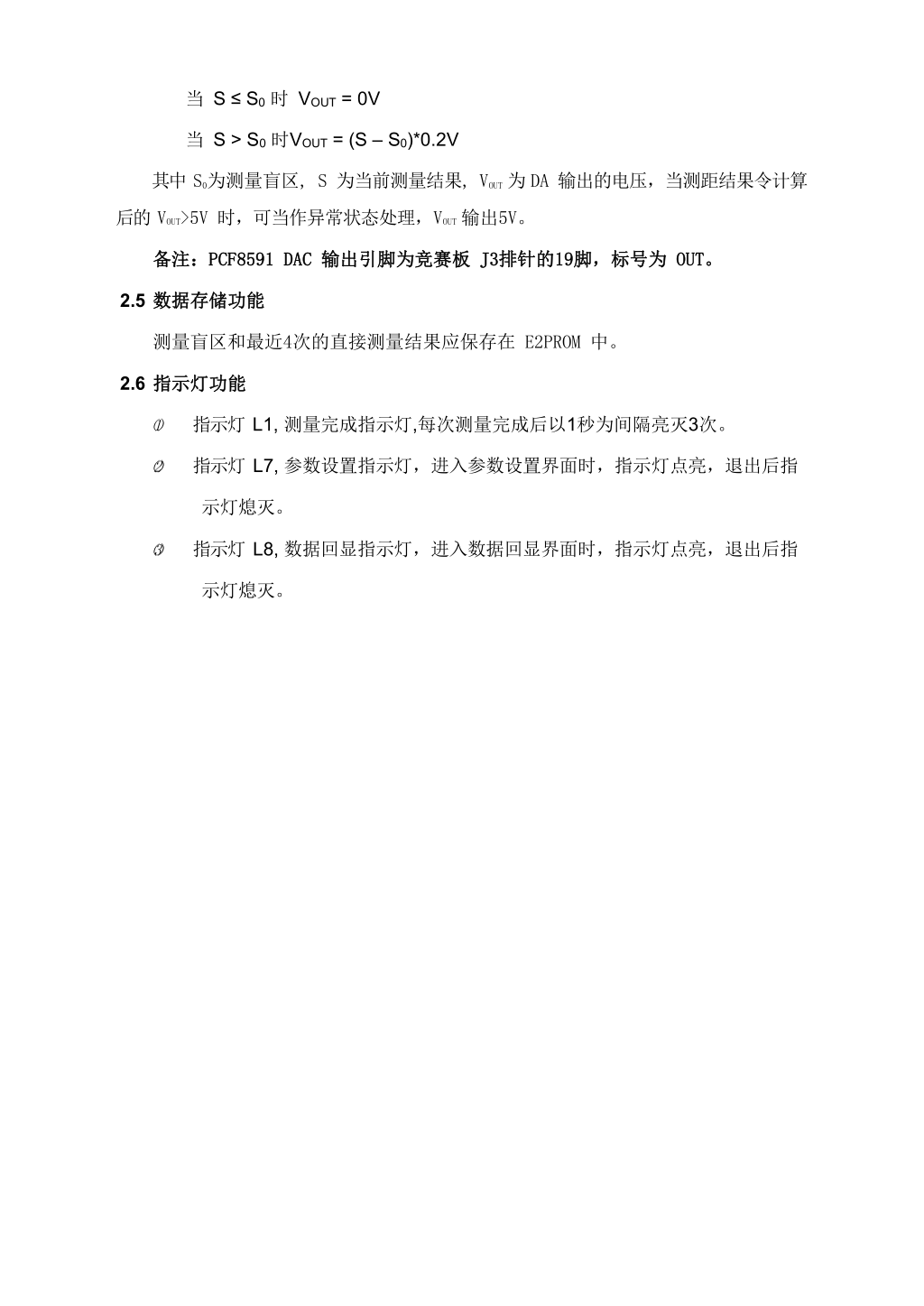
void disp_DAC()
{
if(distance<=number)
{
Write_DAC(0);
}
else if(distance>number)
{
if((int)((distance-number)*0.2)>5)
{
Write_DAC(255);
}else{
Write_DAC((int)(((distance-number)*0.2)*255/5.0));
}
}
}
void disp_LED()
{
uchar i=0;
if(set_mode==2)
{
LED|=64;
}else{
LED&=~64;
}
if(set_mode==1)
{
LED|=128;
}else{
LED&=~128;LED&=~2;LED&=~4;LED&=~8;LED&=~16;LED&=~32;
}
if(flag==1&&led_count<6000) //在保存的情况下间隔1s亮灭3次
{
if(led_flag){
LED|=1;
}
else{
LED&=~1;
}
}
else {
led_count=0;
flag=0;
LED&=~1;
}
}
void main()
{
allinit();
Timer0Init();
EA=0;
number=Read_eeprom(0x06);
EA=1;
while(1)
{
disp_DAC();
switch(set_mode)
{
case 0:
table[0]=12;table[1]=16;
table[2]=distance/100;
table[3]=distance/10%10;
table[4]=distance%10;
table[5]=old_distance/100;
table[6]=old_distance/10%10;
table[7]=old_distance%10;
break;
case 1:
EA=0;
eep[0]=Read_eeprom(0x01);Delay10ms();eep[1]=Read_eeprom(0x02);Delay10ms();
eep[2]=Read_eeprom(0x03);Delay10ms();eep[3]=Read_eeprom(0x04);Delay10ms();
EA=1;
table[0]=bh;table[1]=16;table[2]=16;table[3]=16;table[4]=16;
table[5]=eep[bh-1]/100;
table[6]=eep[bh-1]/10%10;
table[7]=eep[bh-1]%10;
break;
case 2:
table[0]=15;table[1]=16;table[2]=16;table[3]=16;
table[4]=16;table[5]=16;table[6]=number/10%10;table[7]=number%10;
break;
}
disp_LED();
disp_key();
}
}2、iic
/*
程序说明: IIC总线驱动程序
软件环境: Keil uVision 4.10
硬件环境: CT107单片机综合实训平台 8051,12MHz
日 期: 2011-8-9
*/
#include "reg52.h"
#include "intrins.h"
#define DELAY_TIME 5
#define SlaveAddrW 0xA0
#define SlaveAddrR 0xA1
//总线引脚定义
sbit SDA = P2^1; /* 数据线 */
sbit SCL = P2^0; /* 时钟线 */
void IIC_Delay(unsigned char i)
{
do{_nop_();}
while(i--);
}
//总线启动条件
void IIC_Start(void)
{
SDA = 1;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 0;
}
//总线停止条件
void IIC_Stop(void)
{
SDA = 0;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 1;
IIC_Delay(DELAY_TIME);
}
//等待应答
bit IIC_WaitAck(void)
{
bit ackbit;
SCL = 1;
IIC_Delay(DELAY_TIME);
ackbit = SDA;
SCL = 0;
IIC_Delay(DELAY_TIME);
return ackbit;
}
//通过I2C总线发送数据
void IIC_SendByte(unsigned char byt)
{
unsigned char i;
for(i=0; i<8; i++)
{
SCL = 0;
IIC_Delay(DELAY_TIME);
if(byt & 0x80) SDA = 1;
else SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 1;
byt <<= 1;
IIC_Delay(DELAY_TIME);
}
SCL = 0;
}
//从I2C总线上接收数据
unsigned char IIC_RecByte(void)
{
unsigned char i, da;
for(i=0; i<8; i++)
{
SCL = 1;
IIC_Delay(DELAY_TIME);
da <<= 1;
if(SDA) da |= 1;
SCL = 0;
IIC_Delay(DELAY_TIME);
}
return da;
}
//Write eeprom
void Write_eeprom(unsigned char add,unsigned char dat)
{
IIC_Start();
IIC_SendByte(0xa0);
IIC_WaitAck();
IIC_SendByte(add);
IIC_WaitAck();
IIC_SendByte(dat);
IIC_WaitAck();
IIC_Stop();
}
unsigned char Read_eeprom(unsigned char add)
{
unsigned char temp;
EA=0;
IIC_Start();
IIC_SendByte(0xa0);
IIC_WaitAck();
IIC_SendByte(add);
IIC_WaitAck();
IIC_Start();
IIC_SendByte(0xa1);
IIC_WaitAck();
temp=IIC_RecByte();
IIC_WaitAck();
IIC_Stop();
EA=1;
return temp;
}
//Write DAC
void Write_DAC(unsigned char dat)
{
IIC_Start();
IIC_SendByte(0x90);
IIC_WaitAck();
IIC_SendByte(0X40);
IIC_WaitAck();
IIC_SendByte(dat);
IIC_WaitAck();
IIC_Stop();
}
3、iic.h
#ifndef _IIC_H
#define _IIC_H
void IIC_Start(void);
void IIC_Stop(void);
bit IIC_WaitAck(void);
void IIC_SendByte(unsigned char byt);
unsigned char IIC_RecByte(void);
//Write eeprom
void Write_eeprom(unsigned char add,unsigned char dat);
unsigned char Read_eeprom(unsigned char add);
//Write DAC
void Write_DAC(unsigned char dat);
#endif总结
一共刷了三次国赛题,才发现还是太菜了,每次都没能在规定时间内完成该有的功能,唯独只有第十一届的国赛题完成了,还是得大量的敲代码,要不然代码思维真的会退步。
希望本篇博客对你有帮助,有什么不足的,请您指正,一起学习!最近在学习stm32,遇到了很多坑,后面我会给大家发一些,免得大家后面学习stm32时踩坑,浪费时间。
还有就是那些要钱的博客有些真的很坑!千万别踩坑,我朋友就是例子。别用钱去买无用的知识。















 952
952











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









