







文章目录
1. 前言
在此之前我们已经学习了单片机的定时器、中断、数码管。这篇文章主要讲述如何用上述的知识自己制作一个基于51单片机的数字时钟。
1.1. 设计要求
(1)主电路由秒信号发生器、“时、分、秒”计数器、译码器及显示器、校准电路等构成。
(2)秒信号发生器一般用石英晶体振荡器加分频器实现。
(3)译码电路将时、分、秒计数器的输出状态送七段译码器译码,经过八位LED七段共阴显示器显示出来。
(4)校时电路用来对时、分、秒显示数字进行校对。
2. 硬件原理
2.1. 时钟信号(晶振)
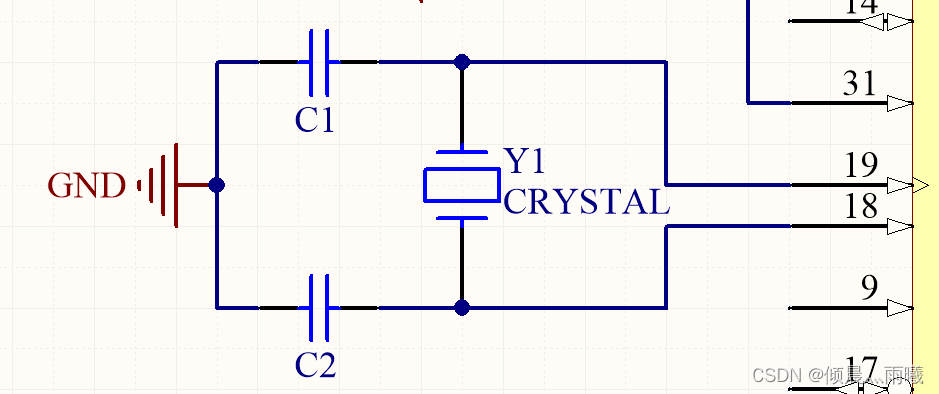
单片机晶振部位电路,详情请参考《51单片机入门——单片机最小系统》,在此项目中我们选择 11.0592 MHz的晶振。
2.2. 按键开关

按键部分我们选择使用单片机的P3.0、P3.1、P3.2 三个 I/O 口 使用。
初版原理:按下开关K2“时”加一,按下开关K3“分”加一,按下开关K4“秒”加一。
终版原理:按下开关K3加一,按下开关K2控制按钮2的位移(例如:刚开始按K3无反应,按一下K2后秒加、再按分加),按下开关K4控制“时分秒”与“年月日”的切换。
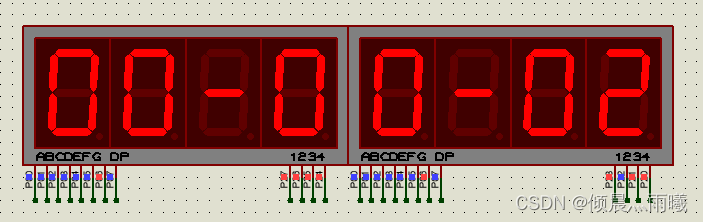
2.3. 数码管显示
在仿真软件中我们选择使用两个4位共阴极数码管(红色),实际电路中选择两个4位0.36英寸的红色共阴极数码管。
3. 原理图
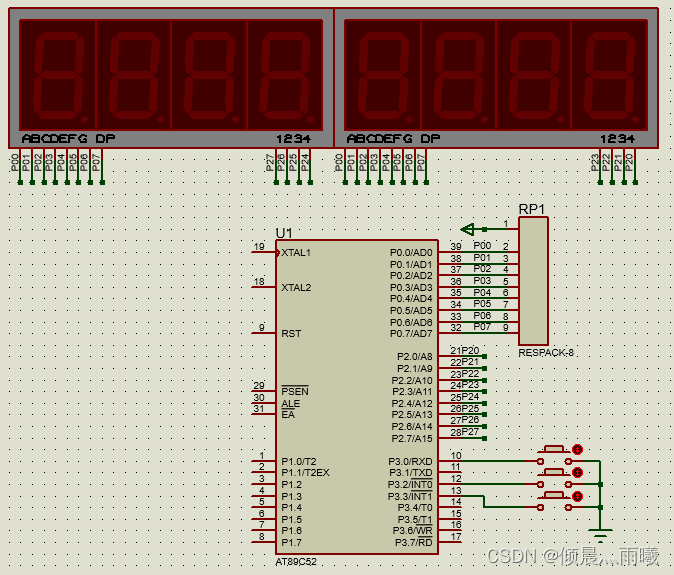
3.1. 仿真原理图
3.2. AD原理图

3.3. PCB图

4. 软件设计
4.1. 初版代码(无年月日)
//该程序使用两个四位共阴数码管,10.0592Mhz晶振,STC89C52RC单片机,三个轻触开关
#include<reg51.h>
#define uchar unsigned char
#define uint unsigned int
//单独控制某个引脚的电平不能直接写P3^0=1,必须先定义引脚
sbit key0 = P3^0 ;
sbit key1 = P3^2 ;
sbit key2 = P3^3 ;
uchar s[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F}; //共阴数码管0~9
uchar a = 0 ,hour = 0 , min = 0 , sec = 0 ;
uchar b = 0 , c = 0 , d = 0;
void time0_server_() interrupt 1 // interrupt 0表示外部中断0 , 1表示定时器中断0 , 2表示外部中断1 , 3表示定时器中断1 , 4表示串口中断
{
TH0 = 0x4c ;
TL0 = 0x00 ;
a++;
if(a == 20) //20 * 50 = 1000ms = 1s 即每隔1s“秒”加1
{
a = 0 ;
sec = sec + 1 ;
}
if(sec == 60) //sec=60时清空,“分”加1
{
min = min + 1 ;
sec = 0 ;
}
if(min == 60) //min=60时清空,“时”加1
{
hour = hour + 1 ;
min = 0 ;
}
if(hour == 24) //hour=24时清空
{
hour = 0 ;
}
}
void init_t0()
{
TMOD = 0x01 ; //采用16位定时器
TH0 = 0x4C ; //50ms (65536-50000)/256
TL0 = 0x00 ; // (65536-50000)%256
EA = 1 ; //开启定时器0的中断
ET0 = 1 ; //开启总中断
TR0 = 1 ; //启动定时器0
}
void delay(uint n) //延时函数(运行空项目以达到延迟时间的效果)
{
uint i,j;
for(i = 0 ; i < n ; i ++)
{
for(j = 0 ; j < 120 ; j ++);
}
}
void display1() //在数码管上显示
{
uchar t0 = 0 ,t1 = 0 , t2 = 0 , t3 = 0 , t4 = 0 , t5 = 0 ;
t0 = hour / 10 ; //t0表示时针的十位
t1 = hour % 10 ; //t1表示时针的个位
t2 = min / 10 ; //t2表示分针的十位
t3 = min % 10 ; //t3表示分针的个位
t4 = sec / 10 ; //t4表示秒针的十位
t5 = sec % 10 ; //t5表示秒针的个位
P2 = 0x7f ; //P2^7低电平 0111 1111 控制第一个数码管
P0 = s[t0] ; //用来显示“时”的十位
delay(1) ; //延时大约1ms
P2 = 0xbf ; //P2^6低电平 1011 1111 控制第二个数码管
P0 = s[t1] ; //用来显示“时”的个位
delay(1) ;
P2 = 0xdf ; //P2^5低电平 1101 1111 控制第三个数码管
P0 = 0x40 ; //显示“—”来分割“时”与“分”
delay(1) ;
P2 = 0xef ; //P2^4低电平 1110 1111 控制第四个数码管
P0 = s[t2] ; //用来显示“分”的十位
delay(1) ;
P2 = 0xf7 ; //P2^3低电平 1111 0111 控制第五个数码管
P0 = s[t3] ; //用来显示“分”的个位
delay(1) ;
P2 = 0xfb ; //P2^2低电平 1111 1011 控制第六个数码管
P0 = 0x40 ; //显示“—”来分割“分”与“秒”
delay(1) ;
P2 = 0xfd ; //P2^1低电平 1111 1101 控制第七个数码管
P0 = s[t4] ; //用来显示“秒”的十位
delay(1) ;
P2 = 0xfe ; //P2^0低电平 1111 1110 控制第八个数码管
P0 = s[t5] ; //用来显示“秒”的个位
delay(1) ;
}
void KEY0() //开关0控制“时”加1
{
if(key0 == 0 && c == 0)
{
c = 1 ;
}
if(key0 == 1 && c == 1)
{
c = 0 ;
hour = hour + 1 ;
}
}
void KEY1() //开关1控制“分”加1
{
if(key1 == 0 && d == 0)
{
d = 1 ;
}
if(key1 == 1 && d == 1)
{
d = 0 ;
min = min + 1 ;
}
}
void KEY2() //开关2控制“秒”加1
{
if(key2 == 0 && b == 0)
{
b = 1 ;
}
if(key2 == 1 && b == 1)
{
b = 0 ;
sec = sec + 1 ;
}
}
void main() //主函数
{
init_t0();
while(1)
{
KEY0();
KEY1();
KEY2();
display1();
}
}
4.2. 终版代码
#include<reg51.h>
#define uchar unsigned char
#define uint unsigned int
sbit key1 = P3^0 ;
sbit key0 = P3^1 ;
sbit key2 = P3^2 ;
sbit key3 = P3^3 ;
uchar s[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F}; //共阴数码管0~9
uchar hour = 10 , min = 10 , sec = 0 ,day = 25 , month = 1 , year = 20 ;
uchar a = 0 ,b = 0 , c = 0 , d = 0 , e = 0 ,f = 0 ;
uchar b_1 = 0 ,c_1 = 0 ;
void time0_server_() interrupt 1
{
TH0 = 0x4c ;
TL0 = 0x00 ;
a++;
e = 2000 + year ;
if(a == 20)
{
a = 0 ;
sec = sec + 1 ;
}
if(sec == 60)
{
min = min + 1 ;
sec = 0 ;
}
if(min == 60)
{
hour = hour + 1 ;
min = 0 ;
}
if(hour == 24)
{
day = day + 1 ;
hour = 0 ;
}
switch(month) //根据月份来控制天数
{
case 1:
case 3:
case 5:
case 7:
case 8:
case 10:
case 12:if(day == 32)
{
month = month + 1 ;
day = 1 ;
}
break ;
case 4:
case 6:
case 9:
case 11:if(day == 31)
{
month =month + 1;
day = 1 ;
}
break ;
case 2:if(e%400==0||e%4==0&&e%100!=0)
{
if(day == 30)
{
month = month + 1 ;
day = 1 ;
}
}
else if(day == 29)
{
month = month + 1 ;
day = 1 ;
}
break ;
}
if(month == 13)
{
year = year + 1 ;
month = 1 ;
}
}
void init_t0()
{
TMOD = 0x01 ;
TH0 = 0x4C ;
TL0 = 0x00 ;
EA = 1 ;
ET0 = 1 ;
TR0 = 1 ;
}
void delay(uint n) //延时函数 大约1ms
{
uint i,j;
for(i = 0 ; i < n ; i ++)
{
for(j = 0 ; j < 120 ; j ++);
}
}
void display1() //显示 “时、分、秒”
{
uchar t0 = 0 ,t1 = 0 , t2 = 0 , t3 = 0 , t4 = 0 , t5 = 0 ;
t0 = hour / 10 ;
t1 = hour % 10 ;
t2 = min / 10 ;
t3 = min % 10 ;
t4 = sec / 10 ;
t5 = sec % 10 ;
/************* 74HC138译码器 辅助控制数码管 ******/
// P2 = 0x1c ;
// P0 = s[t0] ;
// delay(2) ;
// P2 = 0x18 ;
// P0 = s[t1] ;
// delay(2) ;
// P2 = 0x14 ;
// P0 = 0x40 ;
// delay(2) ;
// P2 = 0x10 ;
// P0 = s[t2] ;
// delay(2) ;
// P2 = 0x0c ;
// P0 = s[t3] ;
// delay(2) ;
// P2 = 0x08 ;
// P0 = 0x40 ;
// delay(2) ;
// P2 = 0x04 ;
// P0 = s[t4] ;
// delay(2) ;
// P2 = 0x00 ;
// P0 = s[t5] ;
delay(2) ;
/*********** P2直接控制数码管 *********/
P2 = 0x7f ;
P0 = s[t0] ;
delay(1) ;
P2 = 0xbf ;
P0 = s[t1] ;
delay(1) ;
P2 = 0xdf ;
P0 = 0x40 ;
delay(1) ;
P2 = 0xef ;
P0 = s[t2] ;
delay(1) ;
P2 = 0xf7 ;
P0 = s[t3] ;
delay(1) ;
P2 = 0xfb ;
P0 = 0x40 ;
delay(1) ;
P2 = 0xfd ;
P0 = s[t4] ;
delay(1) ;
P2 = 0xfe ;
P0 = s[t5] ;
delay(1) ;
}
void display2() //显示 “年、月、日”
{
uchar t0 = 0 ,t1 = 0 , t2 = 0 , t3 = 0 , t4 = 0 , t5 = 0 ;
t0 = year / 10 ;
t1 = year % 10 ;
t2 = month / 10 ;
t3 = month % 10 ;
t4 = day / 10 ;
t5 = day % 10 ;
/************* 74HC138译码器 辅助控制数码管 ******/
// P2 = 0x1c ;
// P0 = s[t0] ;
// delay(2) ;
// P2 = 0x18 ;
// P0 = s[t1] ;
// delay(2) ;
// P2 = 0x14 ;
// P0 = 0x40 ;
// delay(2) ;
// P2 = 0x10 ;
// P0 = s[t2] ;
// delay(2) ;
// P2 = 0x0c ;
// P0 = s[t3] ;
// delay(5) ;
// P2 = 0x08 ;
// P0 = 0x40 ;
// delay(2) ;
// P2 = 0x04 ;
// P0 = s[t4] ;
// delay(2) ;
// P2 = 0x00 ;
// P0 = s[t5] ;
// delay(2) ;
/*********** P2直接控制数码管 *********/
P2 = 0x7f ;
P0 = s[t0] ;
delay(1) ;
P2 = 0xbf ;
P0 = s[t1] ;
delay(1) ;
P2 = 0xdf ;
P0 = 0x40 ;
delay(1) ;
P2 = 0xef ;
P0 = s[t2] ;
delay(1) ;
P2 = 0xf7 ;
P0 = s[t3] ;
delay(1) ;
P2 = 0xfb ;
P0 = 0x40 ;
delay(1) ;
P2 = 0xfd ;
P0 = s[t4] ;
delay(1) ;
P2 = 0xfe ;
P0 = s[t5] ;
delay(1) ;
}
void KEY0() //控制按钮2的位移
{
if(key0 == 0 && c == 0)
{
c = 1 ;
}
if(key0 == 1 && c == 1)
{
c = 0 ;
c_1 = c_1 + 1 ;
}
if(c_1 == 4)
{
c_1 = 0 ;
}
}
void KEY1() //控制 "秒"、“分”、“时”、“天”、“月”、“年” 的加1
{
switch(c_1)
{
case 1: if(b_1 == 0)
{
if(key1 == 0 && d == 0)
{
d = 1 ;
}
if(key1 == 1 && d == 1)
{
d = 0 ;
sec = sec + 1 ;
}
}
else if(b_1 == 1)
{
if(key1 == 0 && d == 0)
{
d = 1 ;
}
if(key1 == 1 && d == 1)
{
d = 0 ;
day = day + 1 ;
}
}
break ;
case 2: if(b_1 == 0)
{
if(key1 == 0 && d == 0)
{
d = 1 ;
}
if(key1 == 1 && d == 1)
{
d = 0 ;
min = min + 1 ;
}
}
else if(b_1 == 1)
{
if(key1 == 0 && d == 0)
{
d = 1 ;
}
if(key1 == 1 && d == 1)
{
d = 0 ;
month = month + 1 ;
}
}
break ;
case 3: if(b_1 == 0)
{
if(key1 == 0 && d == 0)
{
d = 1 ;
}
if(key1 == 1 && d == 1)
{
d = 0 ;
hour = hour + 1 ;
}
}
else if(b_1 == 1)
{
if(key1 == 0 && d == 0)
{
d = 1 ;
}
if(key1 == 1 && d == 1)
{
d = 0 ;
year = year + 1 ;
}
}
break ;
}
}
void KEY2() //控制 "秒"、“分”、“时”、“天”、“月”、“年” 的减1
{
switch(c_1)
{
case 1: if(b_1 == 0)
{
if(key2 == 0 && f == 0)
{
f = 1 ;
}
if(key2 == 1 && f == 1)
{
f = 0 ;
sec = sec - 1 ;
if(sec == 255)
{
sec = 59 ;
}
}
}
else if(b_1 == 1)
{
if(key2 == 0 && f == 0)
{
f = 1 ;
}
if(key2 == 1 && f == 1)
{
f = 0 ;
day = day - 1 ;
if(day <= 1)
{
day = 1 ;
}
}
}
break ;
case 2: if(b_1 == 0)
{
if(key2 == 0 && f == 0)
{
f = 1 ;
}
if(key2 == 1 && f == 1)
{
f = 0 ;
min = min - 1 ;
if(min == 255)
{
min = 0 ;
}
}
}
else if(b_1 == 1)
{
if(key2 == 0 && f == 0)
{
f = 1 ;
}
if(key2 == 1 && f == 1)
{
f = 0 ;
month = month - 1 ;
if(month <= 1)
{
month = 1 ;
}
}
}
break ;
case 3: if(b_1 == 0)
{
if(key2 == 0 && f == 0)
{
f = 1 ;
}
if(key2 == 1 && f == 1)
{
f = 0 ;
hour = hour - 1 ;
if(hour == 255)
{
hour = 0 ;
}
}
}
else if(b_1 == 1)
{
if(key2 == 0 && f == 0)
{
f = 1 ;
}
if(key2 == 1 && f == 1)
{
f = 0 ;
year = year - 1 ;
if(year == 255)
{
year = 0 ;
}
}
}
break ;
}
}
void KEY3() //控制“时、分、秒”与“年、月、日”的转换
{
if(key3 == 0 && b == 0)
{
b = 1 ;
}
if(key3 == 1 && b == 1)
{
b = 0 ;
b_1 = b_1 + 1;
}
if(b_1 == 2)
{
b_1 = 0 ;
}
switch(b_1)
{
case 0: display1() ;
break ;
case 1: display2() ;
break ;
}
}
void main()
{
init_t0();
while(1)
{
KEY0();
KEY1();
KEY2();
KEY3();
}
}
5. 元器件清单
5.1. 仿真软件
数码管:7SEG-MPX4-CC
单片机:AT89C52
按键:BUTTON
排阻:RESPACK-8
5.2. 实物
| 名称 | 封装 | 数量 |
|---|---|---|
| STC89C52 | PDIP-40 | 1 |
| 排阻 4.7K | A472J | 1 |
| 10K色环电阻 | AXIAL0.5 | 1 |
| 0.36寸共阴数码管 | CL3631AH | 2 |
| 轻触开关 | DIP-6x6x6 | 4 |
| 30pF电容 | RAD-0.2 | 2 |
| 10uF电解电容 | DIP-EC2.0X5X11 | 1 |
| 11.0592MHz晶振 | OSC HC-49S | 1 |
















 7093
7093











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











