







文章目录
【第四章】进程同步
| 本章概念
1.进程同步相关概念
-
进程同步的目的:使并发执行的诸进程之间能有效地共享资源和相互合作,从而使程序的执行具有可再现性
-
进程间的制约关系:互斥关系(进程互斥使用临界资源)、同步关系(进程间相互合作)
-
临界资源:一次只允许一个 进程使用,称这样的资源为临界 资源或互斥资源或共享变量。进程间应采取互斥方式,实现对临界资源的共享。
-
进入区:用于检查是否可以进入临界区的代码段
临界区:进程中涉及临界资源的代码段;
退出区:将临界区正被访问的标志恢复为未被访问标志。
剩余区:其它代码
item nextConsumed;
while (1) {
//进入区
while (counter == 0)
/* do nothing */
nextConsumed = buffer[out];
out = (out + 1) % BUFFER_SIZE;
counter--; //临界区
//退出区
break;
//其它区
}
- 解决临界区问题的同步机制,需要遵循下列4条准则:空闲让进、忙则等待、有限等待、让权等待(当进程不能进入自己的临界区时,应该立即释放处理机,避免进程陷入忙等)
- 进程同步的机制有:软件同步机制、硬件同步机制、信号量机制、管程机制
2.软件同步机制
-
使用编程方法解决临界区问题,有难度、具有局限性,现在很少采用
-
介绍一种重要的软件同步机制算法 —— Peterson算法
算法思想:如果双方都想进入临界区,可以尝试让进程“孔融让梨”,主动让对方先使用临界区
//共享变量
bool flag[2]; //数组,下标对应进程号,元素表示对应下标的进程有无进入临界区的意愿
int turn = 0; //若在P1中 turn=0,则表示若P0想进入临界区,P1愿意让P0插队进入临界区;若在P0中 turn=1,则表示若P1想进入,P0愿意让P1插队进入临界区
//P0进程
//【进入区】
flag[0] = true; //P0想进入临界区,则flag[0]表示为true
turn = 1; //P0进入临界区的时候若P1也想进,则turn=1表示P0愿意给P1插队
while(flag[1] && turn==1); //若P1正在占用临界区(flag[1]==true)或者 P1不愿意让P0插队,则P0进入就绪状态,等待P1用完临界资源
critical section; //【临界区】
flag[0] = false; //【退出区】使用完临界资源,则想进入临界区改为false
ramainder section; //【剩余区】
//P1进程
flag[1] = true;
turn = 0;
while(flag[0] && turn==0);
critical section;
flag[1] = false;
remainder section;
3.硬件同步机制
-
缺点:不符合“让权等待”原则,浪费CPU时间。很难解决复杂的同步问题
-
关中断:
- 进入锁测试之前关闭中断,完成锁测试并上锁之后才打开中断(与原语的实现思想相同,即在某进程开始访问临界区到结束访问为止都不允许被中断,也不能发生进程切换,进而不可能发生两个进程同时访问临界区的情况)
- 优点:简单、高效
- 缺点:不适用于多处理机,只适用于操作系统内核进程,不适用于用户进程(因为开 / 关中断指令只运行在内核态,这组指令如果能让用户用会很危险)
-
互斥锁:
- 设临界区的类名为S。为了保证每一次临界区中只能有一个程序段被执行, 又设锁定位 key[S]。key[S] 表示该锁定位属于类名为S的临界区。
- key[S]=1时表示类名为S的临界区可用, 位 key[S]=0时表示类名为S的临界区不可用。
-
TestAndSet 指令:是一种借助一条硬件指令——“测试并建立”指令TS(Test-andSet)以实现互斥的方法。在许多计算机中都提供了这种指令
//lock表示当前临界区是否被加锁,true加了,false没加
bool TestAndSet (bool *lock){
bool old = *lock;
*lock = true;
return old;
}
//进程Pi
while(TestAndSet(&lock));
//临界区代码
.....
lock = false; //解锁
//剩余区代码
.....
- Swap指令:用硬件实现的,执行过程中不允许被中断,只能一气呵成
//Swap 指令的作用是交换两个变量的值
Swap (bool *a , bool *b){
bool temp;
temp = *a;
*a = *b;
*b = temp;
}
//进程Pi
do{
key = true;
do{
Swap(lock,key);
}while(key != false)
//临界区代码
......
lock = false;
//剩余区代码
......
}while(true)
4.信号量机制
- 软件同步机制和硬件同步机制,都无法实现“让权等待”
- 原语:只能一气呵成,不能被中断。原语是由关中断 / 开中断指令实现的。因此若能把进入区、退出区的操作用原语来实现,则可避免同时访问临界区的问题
- wait(S) 原语和 Signal(S) 原语,可以理解为一个名为wait / signal的方法(函数),S即为我们传入的参数——信号量。
- PV操作:
- 常常把 wait(S) 写成 P操作,Signal(S) 写成V操作。即:Wait(s)又称为P(S),为进入操作;Signal(s)又称为V(S),V为退出操作
- P.V操作必须成对出现,有一个P操作就一 定有一个V操作
- 当为互斥操作时,它们同处于同一进程;当为同步操作时,则不在同一进程中出现
- 信号量机制缺点:同步操作分散、易读性差、不利于修改和维护、正确性难以保证
下面介绍一些常见信号量:
- 整型信号量:S为整型变量。缺点:进程忙等
wait(S):
while s<=0 ; /*do no-op*/
s:=s-1;
signal(S):
s:=s+1;
- 记录型信号量:去除忙等的信号量
- 每个信号量S除一个整数值S.value外,还有一个进程等待队列S.list,存放阻塞在该信号量的各个进程PCB
- 信号量只能通过初始化和两个标准的原语PV来访问,作为OS核心代码执行,不受进程调度的打断
- 初始化指定一个非负整数值,表示空闲资源总数(又称为"资源信号量"),若为非负值表示当前的空闲资源数,若为负值其绝对值表示当前等待临界区的进程数
wait(semaphores *S) { //请求一个单位的资源
S->value --; //资源减少一个
if (S->value<0) block(S->list) //进程自我阻塞
}
signal(semaphores *S) //释放一个单位资源
{
S->value++; //资源增加一个
if (S->value<=0) wakeup(S->list); //唤醒等待队列中的一个进程
}
- AND型信号量:
- 基本思想:将进程在整个运行过程中需要的所有 资源,一次性全部分配给进程,待进程使用完后再一起释放。
- 对若干个临界资源的分配,采用原子操作。
- 在wait(S)操作中增加了一个“AND”条件,故称之为AND同步
Swait(S1,S2,…,Sn) {
while (TRUE) {
if (Si>=1 && … && Sn>=1) {
for (i =1;i<=n;i++) Si--){
break;
}
}
}
}
else {
//......
}
}}
信号量集——扩充AND信号量:对进程所申请的所有资源以及每类资源不同的资源需求量,在 一次P、V原语操作中完成申请或释放
- 信号量的应用:信号量必须置一次且只能置一次初值,初值不能为负数;除了初始化,只能通过执行P、V操作来访问信号量
- 利用信号量实现进程互斥:设置互斥信号量
- 利用信号量实现前趋关系
- 利用信号量实现进程同步:设置同步信号量
//信号量实现互斥
semaphore mutex;
mutex=1; // 初始化为1
while(1)
{
wait(mutex);
临界区;
signal(mutex);
剩余区;
}
//信号量实现进程同步
P1(){
C1;
signal(s);
…
}
P2(){
…
wait(s);
C2;
}
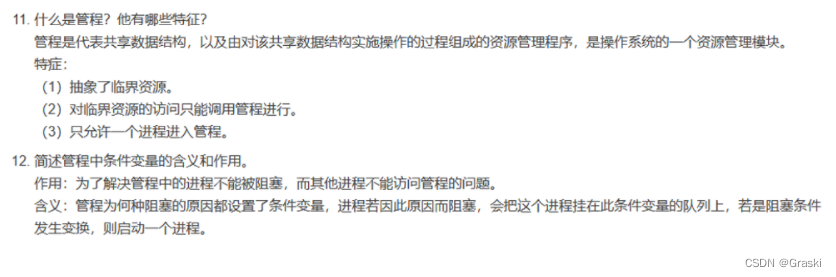
5.管程机制(了解)
-
由编程语言解决同步互斥问题
-
一个管程定义了一个数据结构和能为并发进程所执行(在该 数据结构上)的一组操作
-
管程的功能:互斥(管程中的变量只能被管 程中的操作访问、任何时候只有一个进程在管程中操作、类似临界区、由编译器完成)、同步
| 本章算法
1.生产者-消费者 进程同步问题
-
需要注意的地方
- 用于实现互斥的wait(mutex)和signal(mutex)必须成对出现
- 每个程序中的多个wait操作的顺序不能颠倒,应先执行对资源信号量的wait操作,再执行对互斥信号量的wait操作,否则可能会引起进程死锁。
-
具体代码与实现,请参考:https://blog.csdn.net/liushall/article/details/81569609
//生产者-消费者 伪代码
var items = 0, space = 10, mutex = 1;
var in = 0, out = 0;
item buf[10] = { NULL };
producer {
while( true ) {
wait( space ); // 等待缓冲区有空闲位置, 在使用PV操作时,条件变量需要在互斥锁之前
wait( mutex ); // 保证在product时不会有其他线程访问缓冲区
// product
buf.push( item, in ); // 将新资源放到buf[in]位置
in = ( in + 1 ) % 10;
signal( mutex ); // 唤醒的顺序可以不同
signal( items ); // 通知consumer缓冲区有资源可以取走
}
}
consumer {
while( true ) {
wait( items ); // 等待缓冲区有资源可以使用
wait( mutex ); // 保证在consume时不会有其他线程访问缓冲区
// consume
buf.pop( out ); // 将buf[out]位置的的资源取走
out = ( out + 1 ) % 10;
signal( mutex ); // 唤醒的顺序可以不同
signal( space ); // 通知缓冲区有空闲位置
}
}
2.读者-写者 进程同步问题
-
有两组并发进程:读者和写者, 共享一组数据区
-
要求:允许多个读者同时执行读操作;不允许读者、写者同时操作;不允许多个写者同时操作。
-
分类:读者优先(第一类 读者写者问题) ;写者优先(第二类 读者写者问题)
-
具体代码与实现,请参考:https://blog.csdn.net/qq_35235032/article/details/106652964?spm=1001.2101.3001.6661.1&utm_medium=distribute.pc_relevant_t0.none-task-blog-2%7Edefault%7ECTRLIST%7Edefault-1-106652964-blog-104970354.pc_relevant_multi_platform_whitelistv1&depth_1-utm_source=distribute.pc_relevant_t0.none-task-blog-2%7Edefault%7ECTRLIST%7Edefault-1-106652964-blog-104970354.pc_relevant_multi_platform_whitelistv1&utm_relevant_index=1
//读者优先(伪代码)
// 互斥读者与读者
semaphore rmutex = 1;
// 互斥读者与写者,写者与写者
semaphore mutex = 1;
// 表示读者数量,需看成临界资源,即进来一个读者就+1操作
int readcount = 0;
// 读者进程
void reader()
{
while(TRUE)
{
// 互斥其他读者,只允许一个读者进入
P(rmutex);
if(readcount == 0)
// 如果读者数目为0,所以就必须互斥写者
P(mutex);
// 读者数+1
readcount++;
// 释放,让其他读者进来修改readcount
V(rmutex);
/* 读操作 */
// 读者离开,需要访问readcount
P(rmutex);
readcount--;
// 如果此时没有读者了,表示写者可以进行写了
if(readcount == 0)
V(mutex);
// 释放readcount资源
V(rmutex);
}
}
void writer()
{
while(TRUE)
{
// 写者和一般消费者进程一样,获取信号量值
P(mutex);
/* 写操作 */
// 让文件可读和可写
V(mutex);
}
}
void main()
{
reader();
writer();
reader();
/*.......*/
}
//写者优先(伪代码)
// 互斥读者与写者
semaphore mutex = 1;
// 互斥读者
semaphore rmutex = 1;
// 互斥写者
semaphore wmutex = 1;
// 表示是否还有写者
semaphore readable = 1;
// 读者数量,写者数量
int readcount = 0, writecount = 0;
void reader()
{
// 先看是否可读
P(readable);
// 互斥其他读者修改readcount
P(rmutex);
if(readcount == 0)
// 如果没有读者,需要互斥写者
P(mutex);
readcount++;
V(rmutex);
V(readable);
/* 读取中 */
P(rmutex);
readcount--;
if(readcount == 0)
V(mutex);
V(rmutex);
}
void writer()
{
// 互斥其他写者,写入writecount
P(wmutex);
if(writecount == 0)
// 此时不能让写者以后的读者进去
P(readable)
writecount++;
V(wmutex);
// 互斥在写者之前的读者
P(mutex);
/* 写入中 */
// 写入完成离开
V(mutex);
P(wmutex);
writecount--;
if(writecount == 0)
// 让写者以后的读者可读
V(readable);
V(wmutex);
}
void main()
{
reader();
writer();
reader();
/* ... */
}
3.信号量与进程数的关系
书本课后13题.若信号量的初值为2,当前值为-1,则表示有多少个等待进程?请分析。
信号量初值:表示系统中的资源数量
当信号量 <0 的时候,表示资源已经分配完毕,进程自我阻塞。
因而,” 等待进程 “ 的数量等于 |负值的信号量的绝对值|
因此题目中,有 |-1| = 1个等待进程
书本课后14题.有m个进程共享同一临界资源,若使用信号量机制实现对某个临界资源的互斥访问,请求出信号量的变化范围。
信号量初值为信号量的最大值,表示最多可以分配的请求
若信号量初值为1,则信号量最大为1,最小量为1-m(总有一个进程会进行,因此最多有1-m个阻塞的)
因而变化范围为 [1-m , 1]
书本课后15题.若有4个进程共享同一程序段,而且每次最多允许3个进程进入该程序段,则信号量值的变化范围是什么?
程序段作为共享资源,最多允许3个进程进人其中,因此设置信号量初值为3。当4个进程共享该程序段时,在每个进程申请进入时,信号量都会执行减1操作。
当第1个进程申请进入时,信号量值变为2;
第2个进程申请进入时,信号量值变为1;
第3个进程申请进入时,信号量值变为0,
第4个进程申请进入时,信号量值变为-1。
因此,信号量的变化范围是3,2,1,0,-1
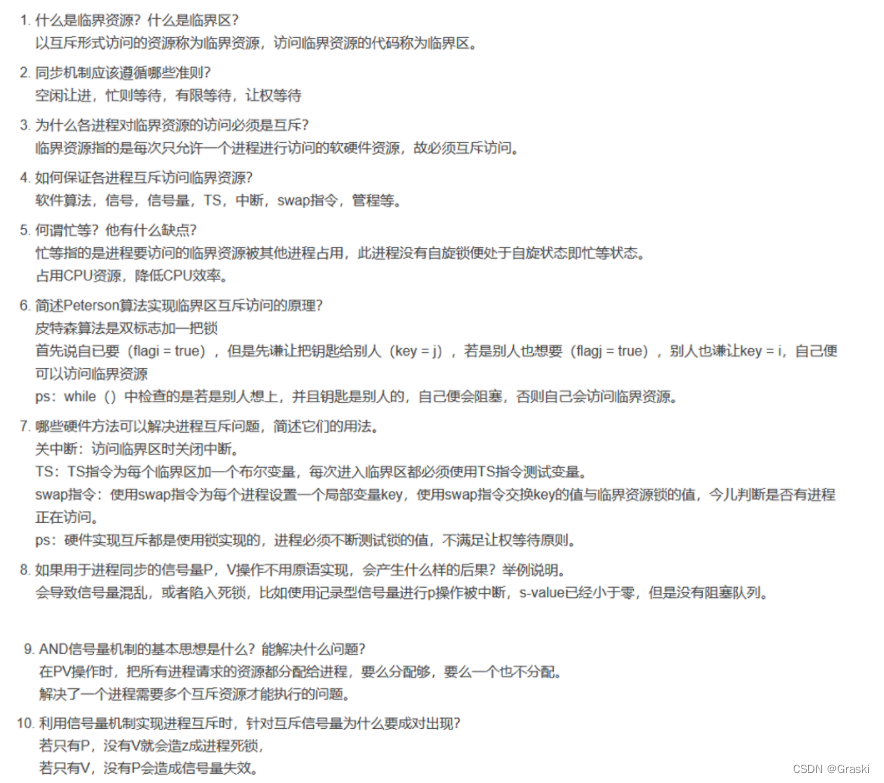
| 课后简答题

















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











