






1:双频激光干涉仪的非线性误差与光学细分关系的研究(江西师范大学)
2:江西师范大学里面的光路图还是不太了解清楚,不知道分析其模型具体作用是什么?
3: 江西师范大学里面的文章告一段落,原因是思路不太行;
2025.2.18
第二篇文章(基于相位调制的差分激光干涉纳米位移测量方法研究_张倚得)
key_word:
正弦相位调制干涉法
不太好发文章这个里面的思路
第三篇文章
1: 第 1 类周期非线性误差是由于双频激光不能完全分离引起双频激光交叉混叠,进而导致的周期非线性误差,该误差幅度可从数纳米到数十纳米;
解决方法:对于第 1 类周期非线性误差,现有误差补偿方法,如椭圆拟合法等,可将其抑制至 0. 1nm量级,特别是空间分离式外差激光干涉仪则从原理上完全消除了这一类误差;
2:第 2 类周期非线性误差是由于测量光束在光学界面产生了具有多阶多普勒频移特征的虚反射光束,进而引入的周期非线性误差,该误差幅度可从数皮米至数纳米。
解决方法:第 2 类误差,通过降低虚反射率和空间滤波可以将第 2 类误差降低至数十皮米到数百皮米,
第四篇文章
韩雪的文章,我看不懂韩雪的文章好吧,目前准备放弃杜老师方向的理论建模这边,因为涉及到的知识太抽象了,我不知道该如何理解与分析其中的知识,相比之下,我还是更加喜欢理解FPGA方向的知识相关。
2025.2.22
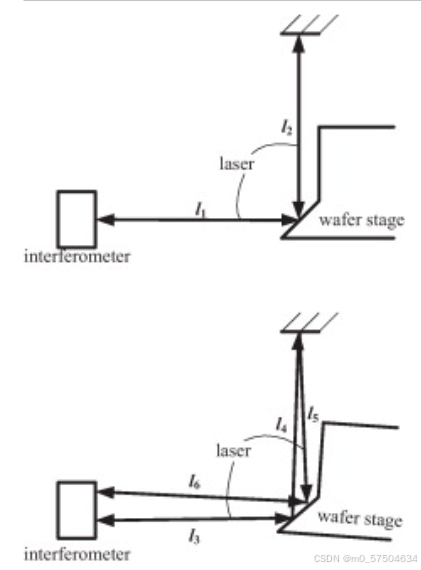
光刻机的结构及指标
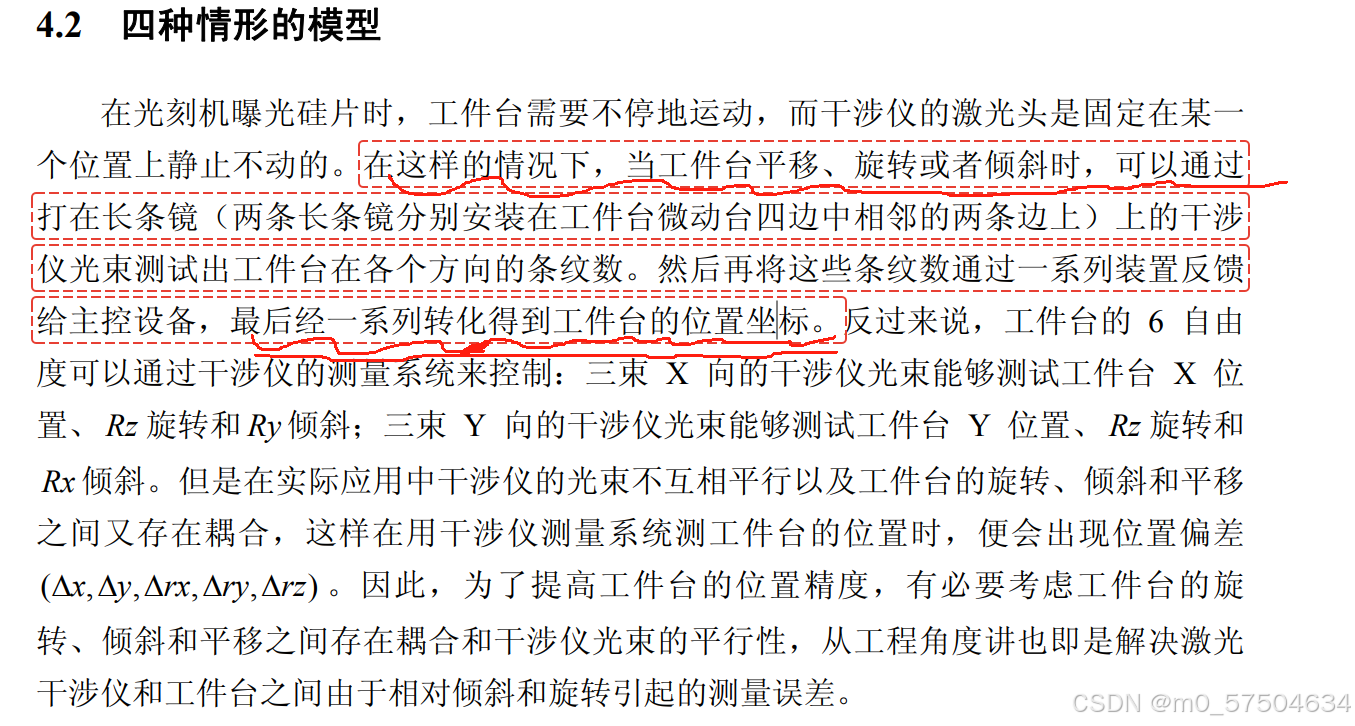
光刻机的主要作用:光源发出光,通过光学镜头系统,将掩膜版上的掩膜版的图形投影到工作台的硅片上,对硅片表面形成曝光,即实现将电路走线光刻到芯片上的功能。
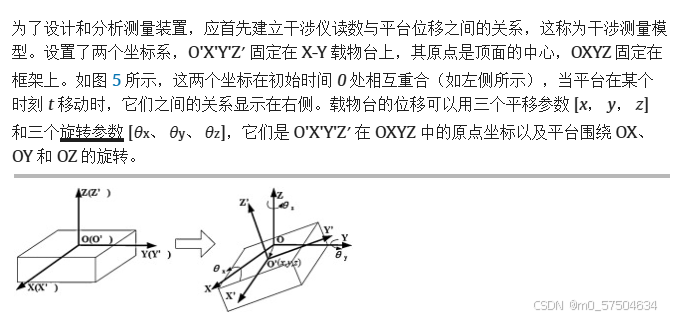
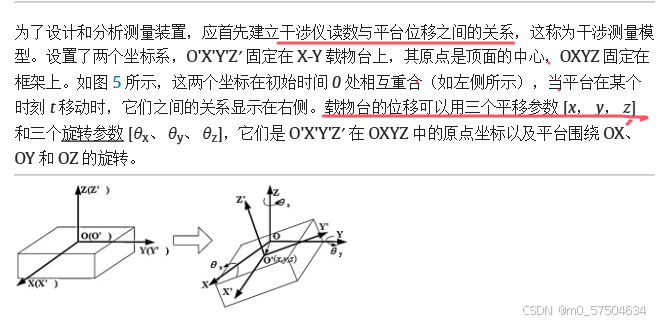
理论纯在问题:在某一方向轴激光干涉仪测量值不仅包含该轴方向位置信息,也包含其他自由度位移造成的耦合项,从数学角度来看,主要来源于微小的转动位移以及正余弦解算误差在误差传递的敏感放大。
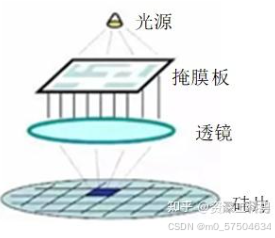
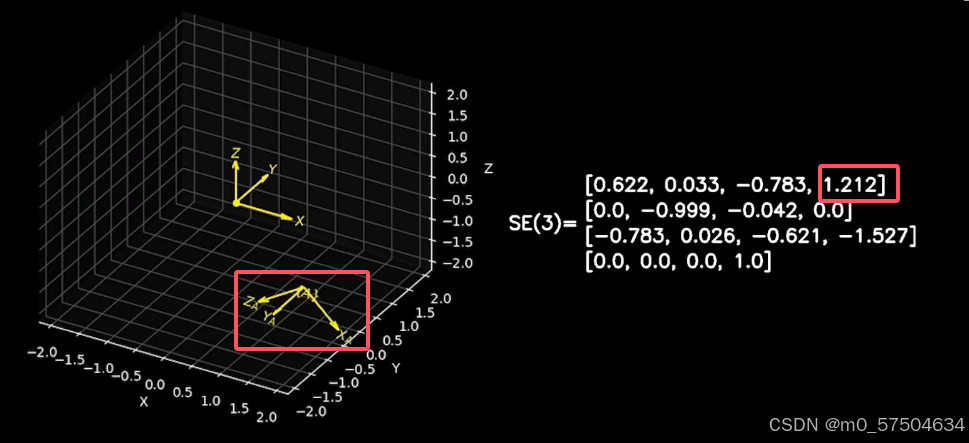
坐标轴旋转想法
初始位置,OXYZ与O'X'Y'Z'是重合;
X方向计算,值得注意的是,计算出来是X方向的增量,而不是测量直线距离,激光测距出来才是距离;增量的意思就是变化量好吧。
Z方向,Z方向同样也是工作台的增量,而不是竖向距离。
坐标轴旋转功能;
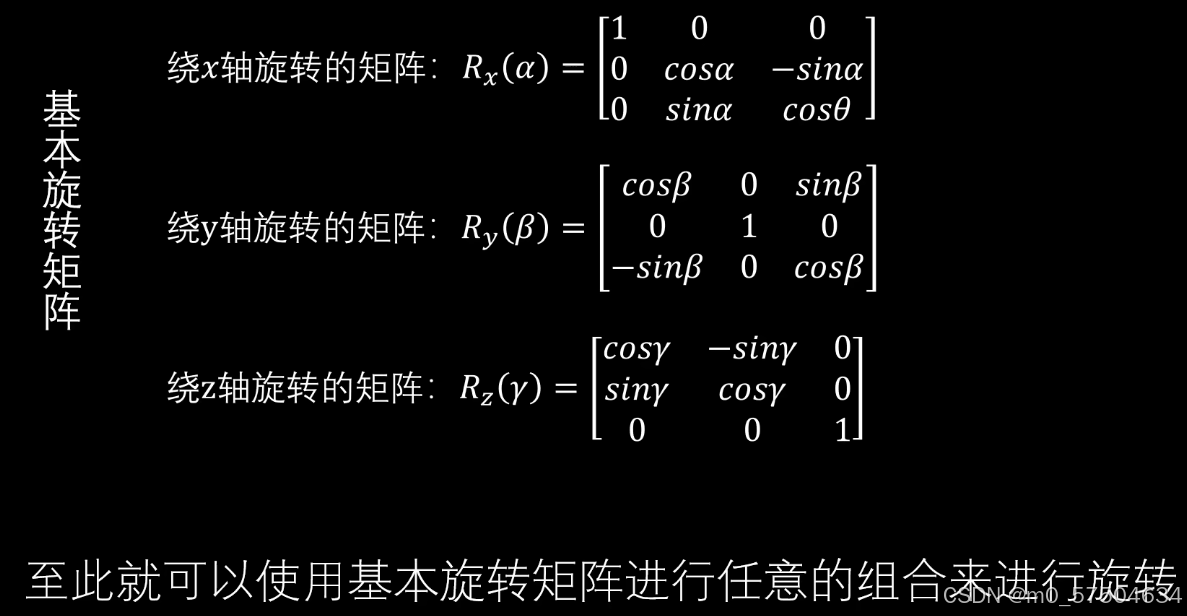
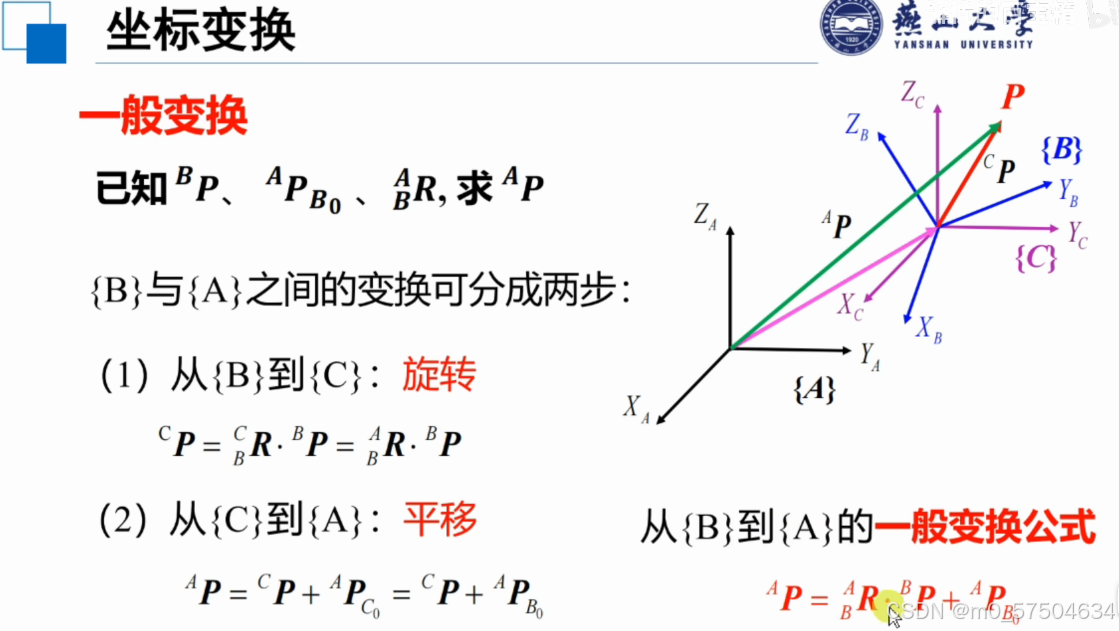
三维坐标旋转基本概念;
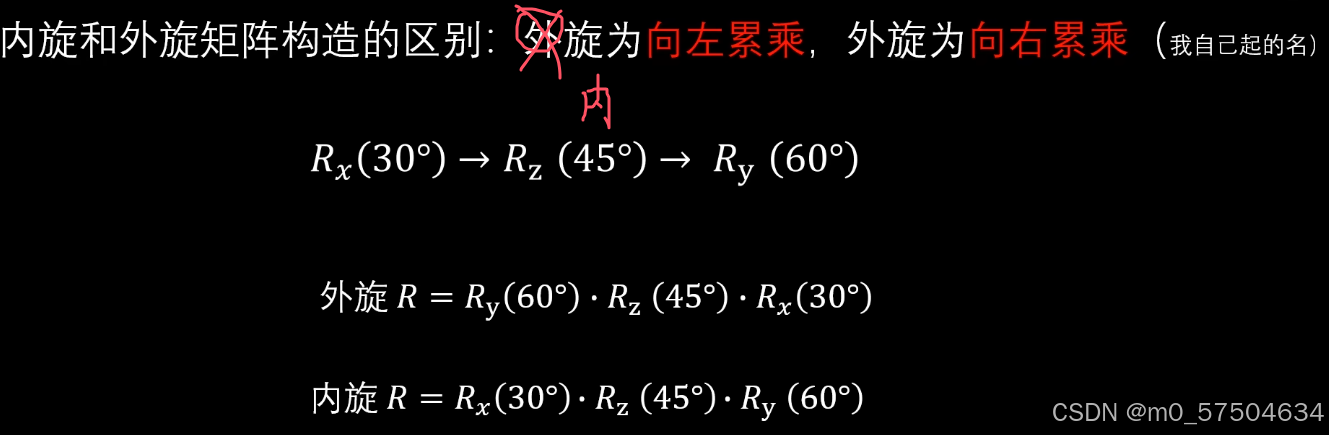
外旋和内旋的区别
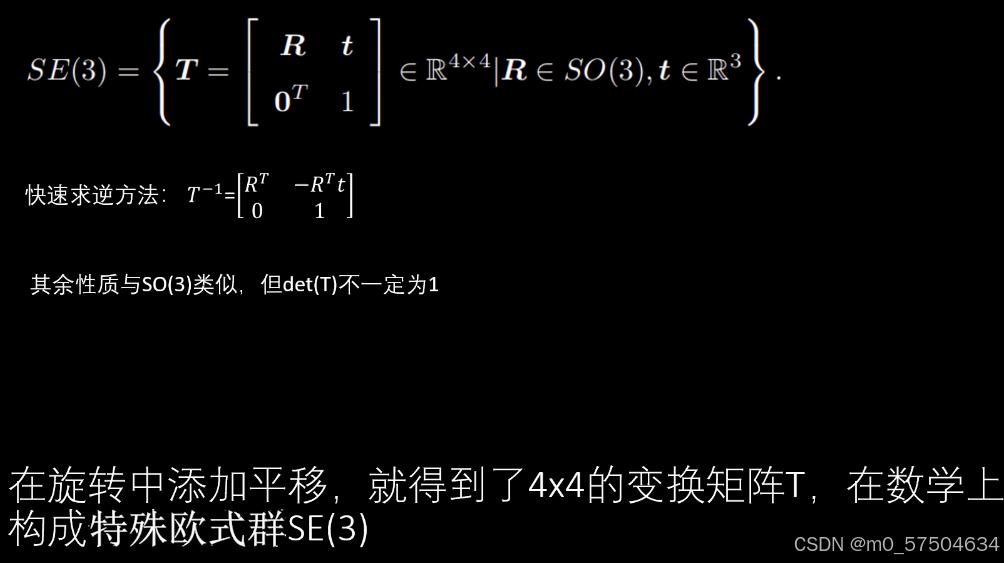
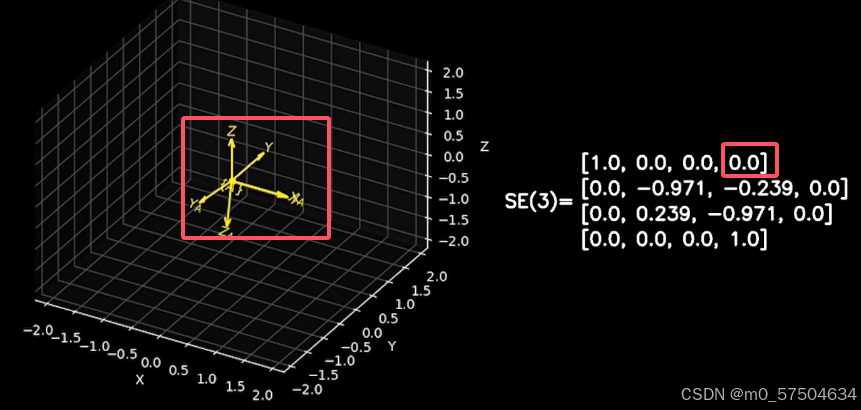
坐标轴平移的旋转矩阵,R是三个坐标轴的旋转因子相乘,t是坐标原点平移因子,t是一个三维向量,分别表示x,y,z三个坐标因子。
变换之后的坐标原点在之前的原点的前面,矩阵的t是正数。
变换之后的坐标原点在之后的原点的前面,矩阵的t是负数。
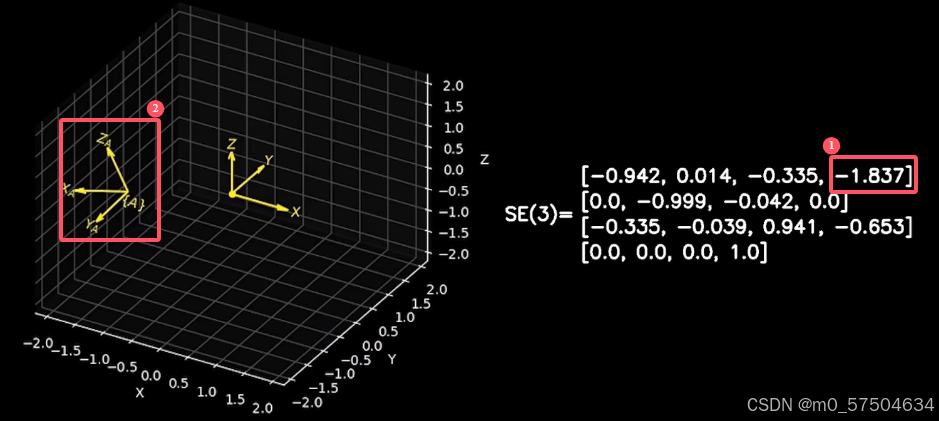
变换之后的坐标原点在原来原点位置,矩阵的t的值为0;
参考连接:一点关于三维坐标变换的可视化与总结:使用旋转与变换矩阵_哔哩哔哩_bilibili
OKOK,现在已经成功吧X方向的读数距离给读取出来;

21:30 开始推导一下Y方向的位置移动变量是多少?
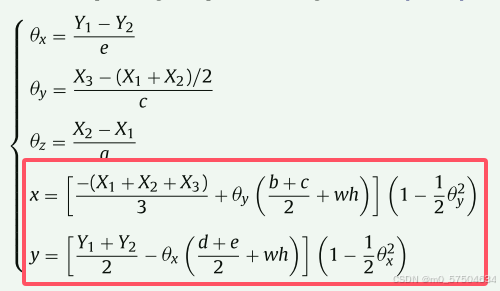
这个x 与 y 变量的值是怎么推导的? (已经基本解决问题)
查看文献;
--------------------------------------------2025.2.23------------------------------------------------------------------------
1:再一次梳理坐标之间的关系;
1: x , y ,z 是工作台旋转之后,相对于原始工作台,位移增加量;
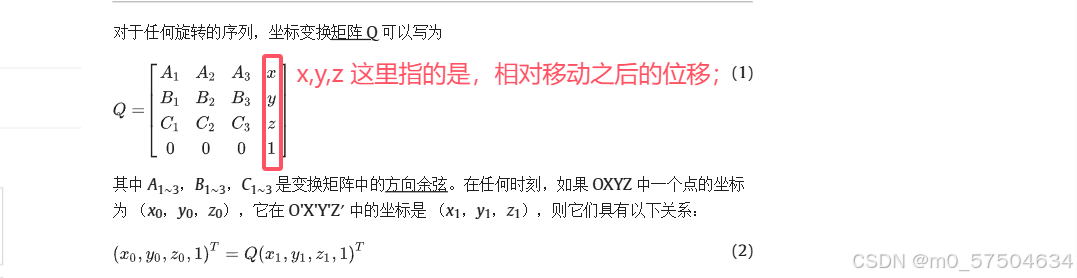
其中(x0 , y0 , z0)是 XYOZ 里面的坐标值;
其中(x1 , y1, z1 )是 X'Y'O'Z'里面的坐标值;
这里这个Q就是转换因子,x,y,z是平台移动之后的位移;
晚上22:55 差不多把整个思路全部梳理清楚;
--------------------------------------------2025.2.24------------------------------------------------------------------------
1: 完成FPGA的代码烧录验证;
2: 完成蓝桥杯板子代码验证;
先行动起来吧;
---------------------------------------------------------------------------------------------------------------------------------
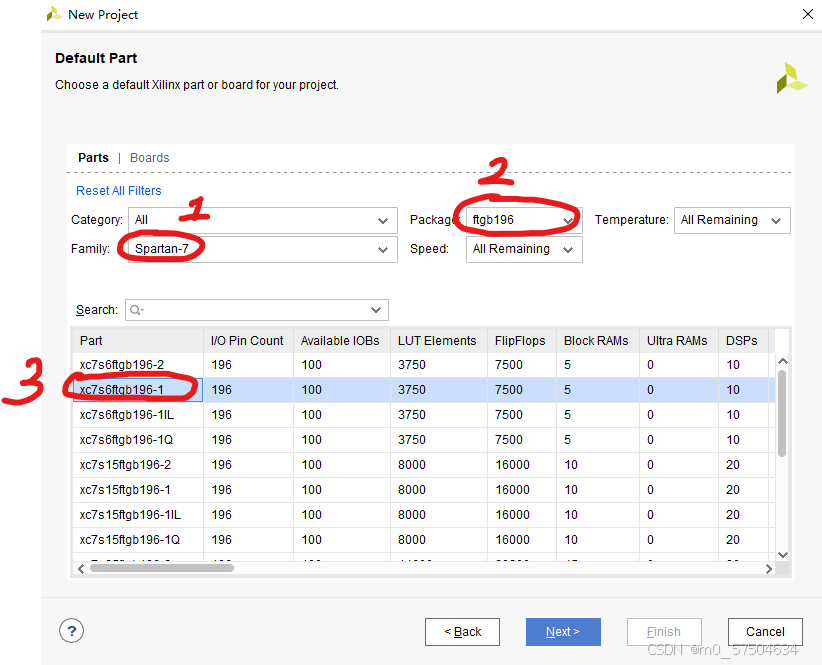
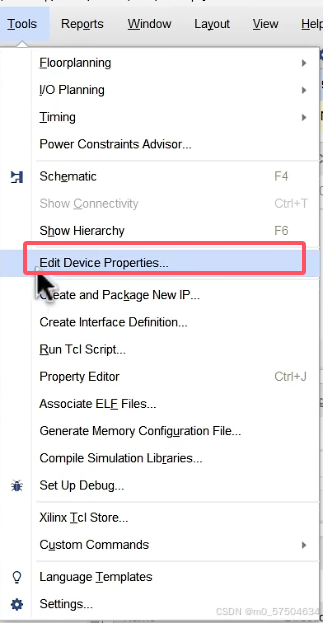
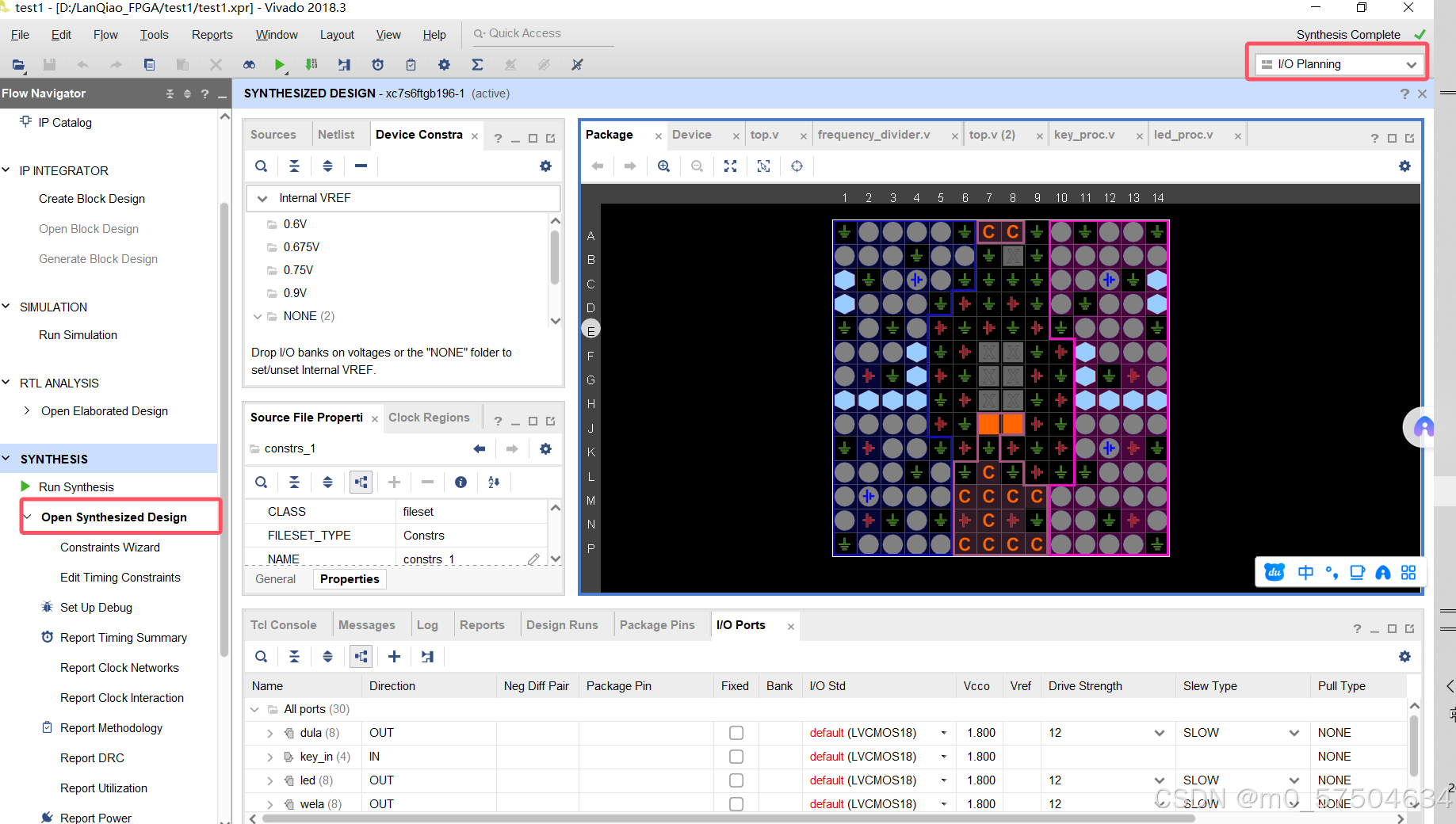
编辑器 Xilinx 平台安装vivado 18.3 版本以上版本代码;
1: 四梯FPGA竞赛实训平台 (Xilinx/XC7S6)
2: 四梯FPGA竞赛实训平台(Altera/EP4CE6)
文件路径:D:\LanQiao_FPGA
文件安装包;
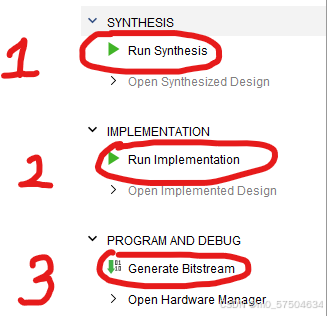
烧录文件步骤
先看资料详细解析吧
---------------------------------------------------------------------------------------------------------------------------------
--------------------------------------------------------2025.3.2-------------------------------------------------------------
1:激光光斑:激光束在空间中形成小而亮的一个光点;
激光光斑形状:圆形,椭圆形或者其他一些形状;
光斑大小:通常用光斑直径和光斑面积表示;
2:解调器:将干涉仪输出的激光干涉信号转换成电信号,并将解析光信号的位移信息,通过网口传送给上位机。
3:解调器默认不使能环境补偿功能,需要通过网口命令,使能环境补偿及死程配置。或者在上位机软件中配置。
--------------------------------------------------------2025.3.3------------------------------------------------------------: 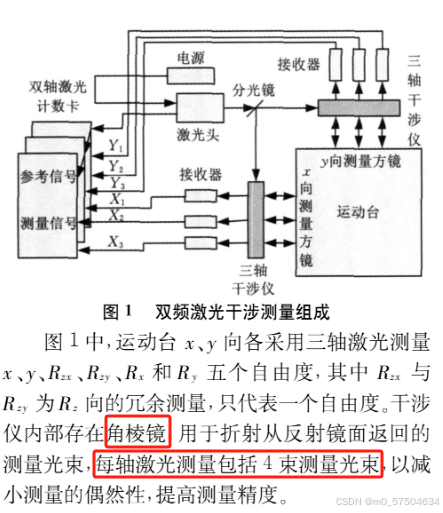
得到工作台核心思路
--------------------------------------------------------2025.3.7-------------------------------------------------------------
FPGA模块
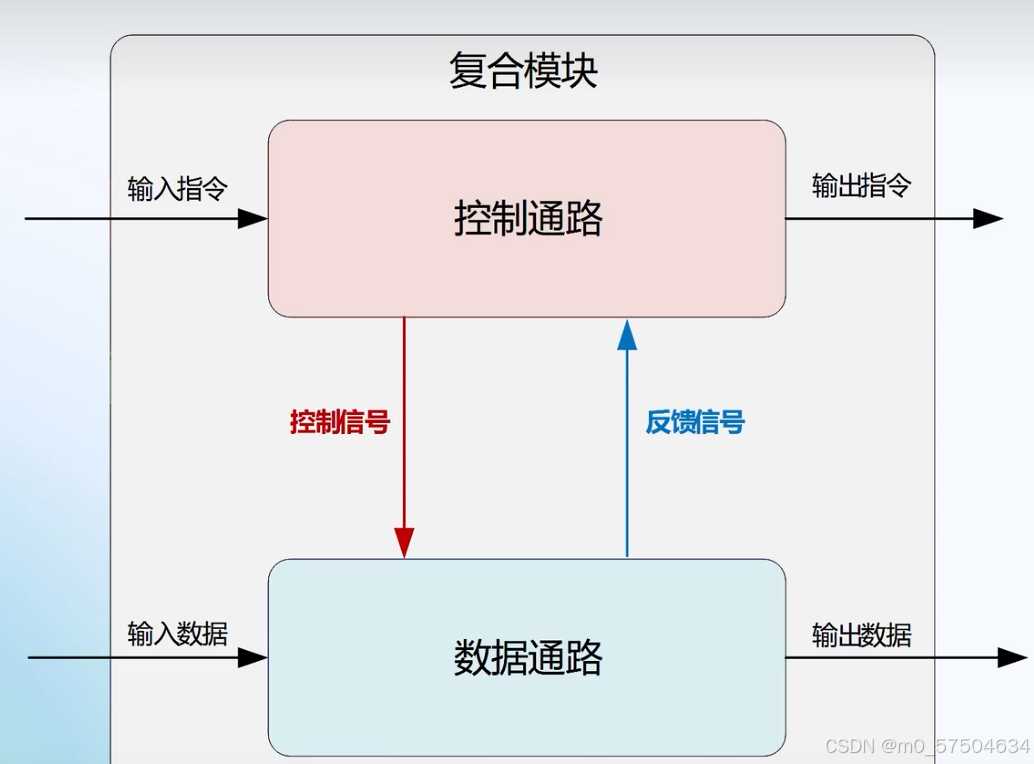
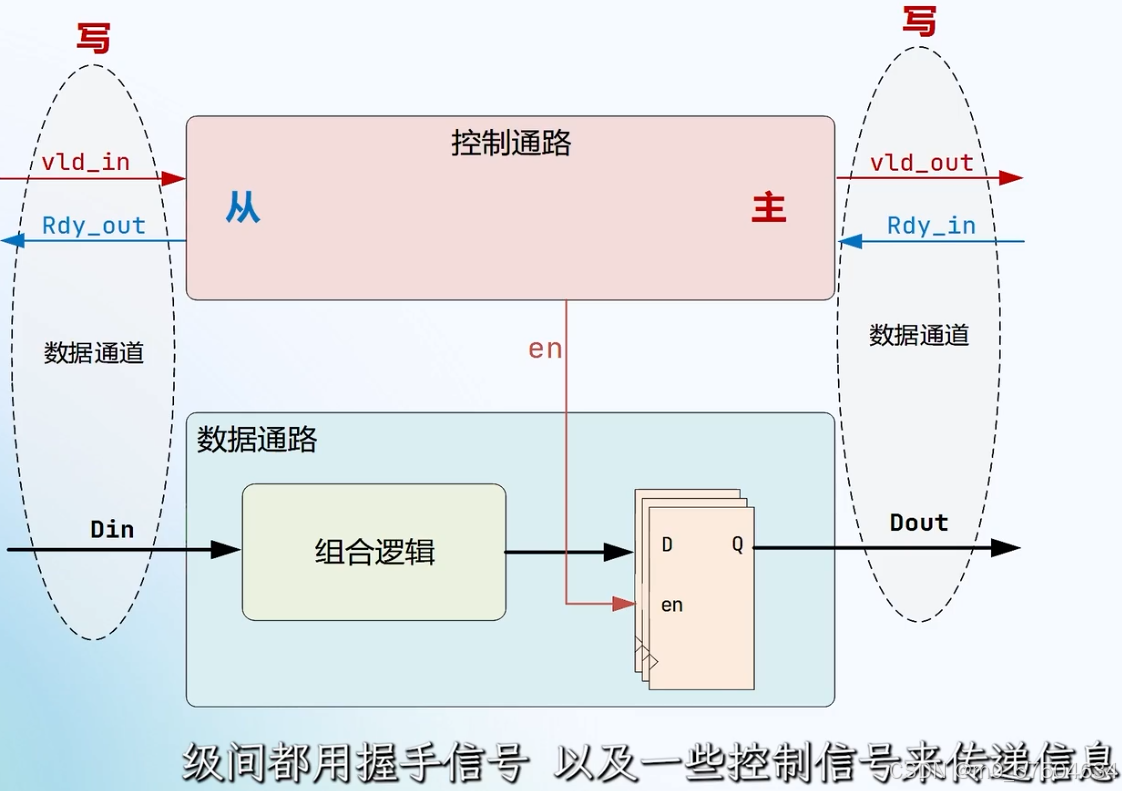
握手信号表示;
配置蓝桥杯想法;
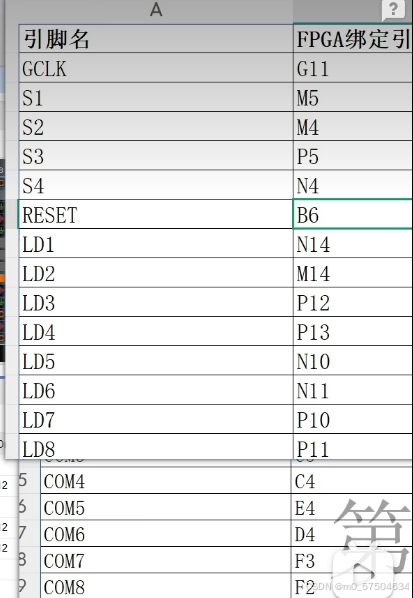
设置引脚配置如下(clk_out + clk_rst_n )

注意限制住条件的因素存在;
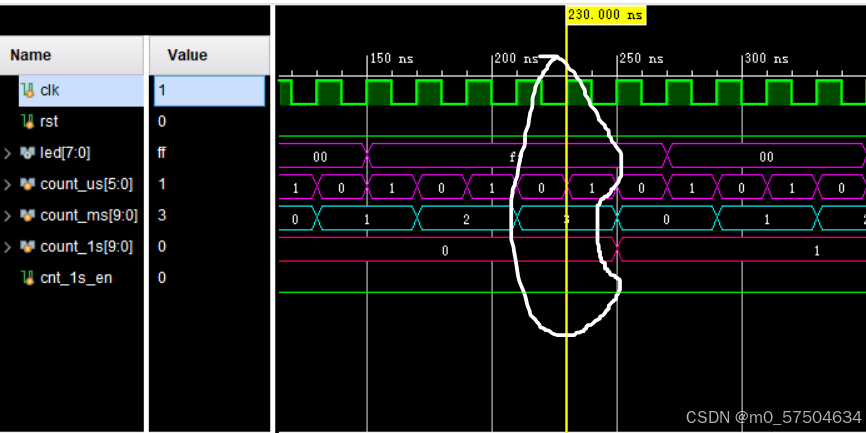
完成了LED_流水灯的代码编写与理解;
完成了LED呼吸灯的代码编写与理解;
2025.3.9日
模块里面内部参数定义;
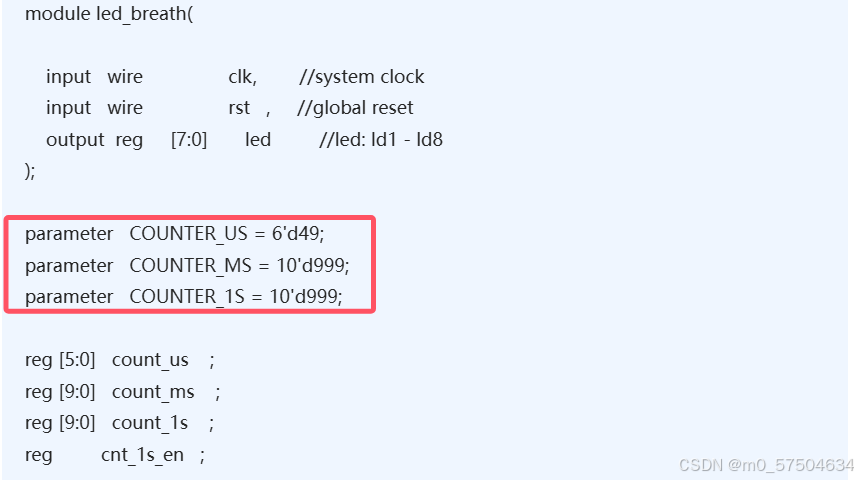
定义内部模块参数使用 parameter 这个关键词进行说明;
parameter 与 localparam 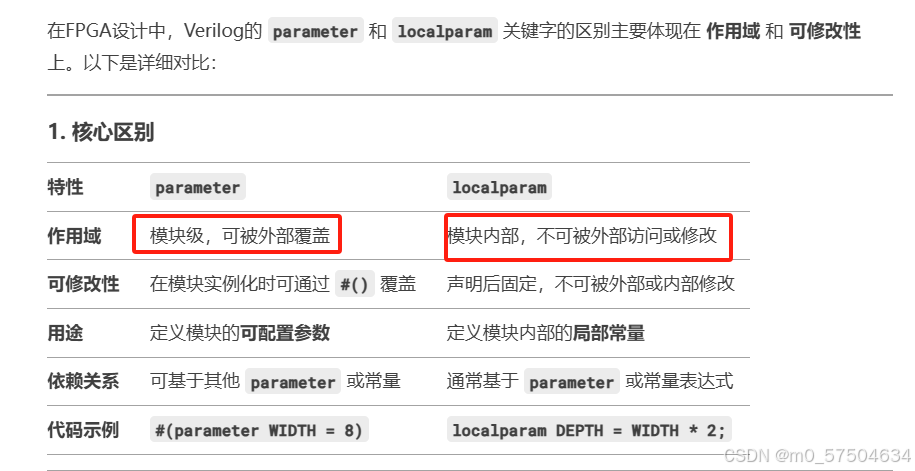
2025.3.10
STM32 使用串口下载程序( ISP 一键下载)_keil下载设置串口下载-CSDN博客
1:复习STM32单片机的串口下载烧录程序代码进入其中;
2:移值LCD屏幕代码出现;
文章想法
文章期刊:optical engineering , Sensors , Optical express.
1:目前想法optical express 这系列的文章;
2:了解optical express 文章的规则(2区)
3:了解Optical Letters文章的规则
4: 了解precision engineering文章的规则(2区)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









