






 本文记录了作者在学习MVS软件过程中对相机成像原理,如CCD与CMOS的区别、量子效率、曝光控制、帧率影响因素、像素格式、ROI功能、Binning和LUT应用等方面的见解,旨在帮助理解工业相机技术的基础知识。
本文记录了作者在学习MVS软件过程中对相机成像原理,如CCD与CMOS的区别、量子效率、曝光控制、帧率影响因素、像素格式、ROI功能、Binning和LUT应用等方面的见解,旨在帮助理解工业相机技术的基础知识。
本文章用于记录自己在学习MVS软件时的见解。
基础知识
相机成像原理
CCD&CMOS
市面上大部分相机芯片都是CMOS,CCD较少,或将被淘汰。
CCD
芯片直接捕获环境光,且芯片面积较大,CCD通常只有一个输出节点,所以要通过串行的方式将每一个像素的电荷进行传输,经过A/D转换模块得到图像
CMOS
芯片捕获环境光时,每个像素上都有A/D转换模块,得到的是电压信号,所以成像速率要快,因为每个模块上都有A/D转换模块,所以芯片面积要小。
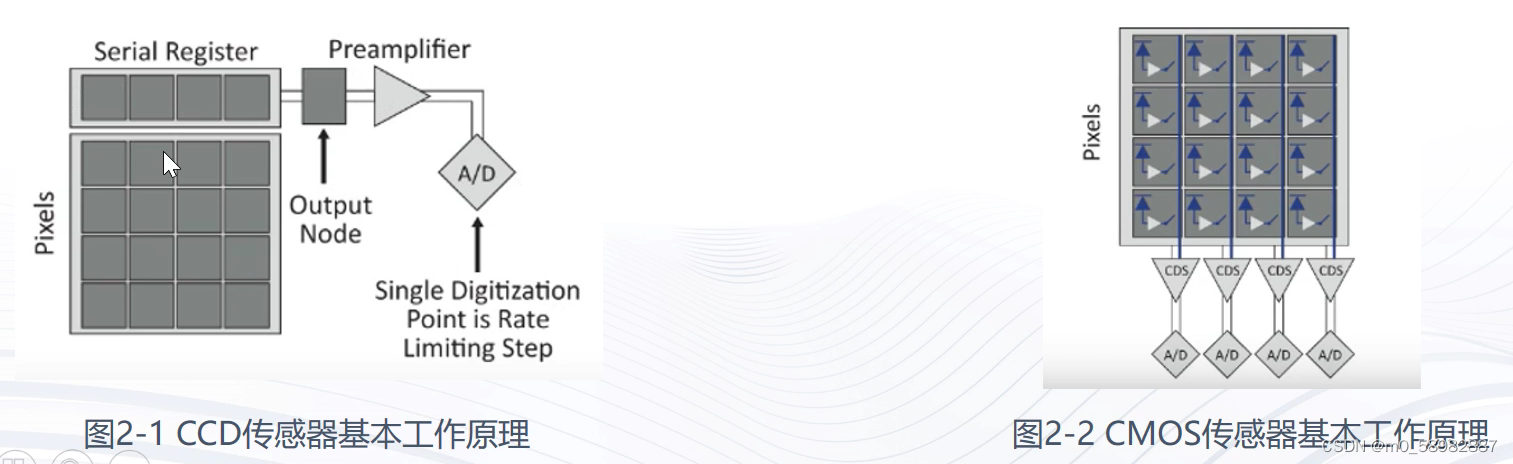
从上图可以看出,CCD只有一条输出节点,所以速率不如CMOS。

量子效率
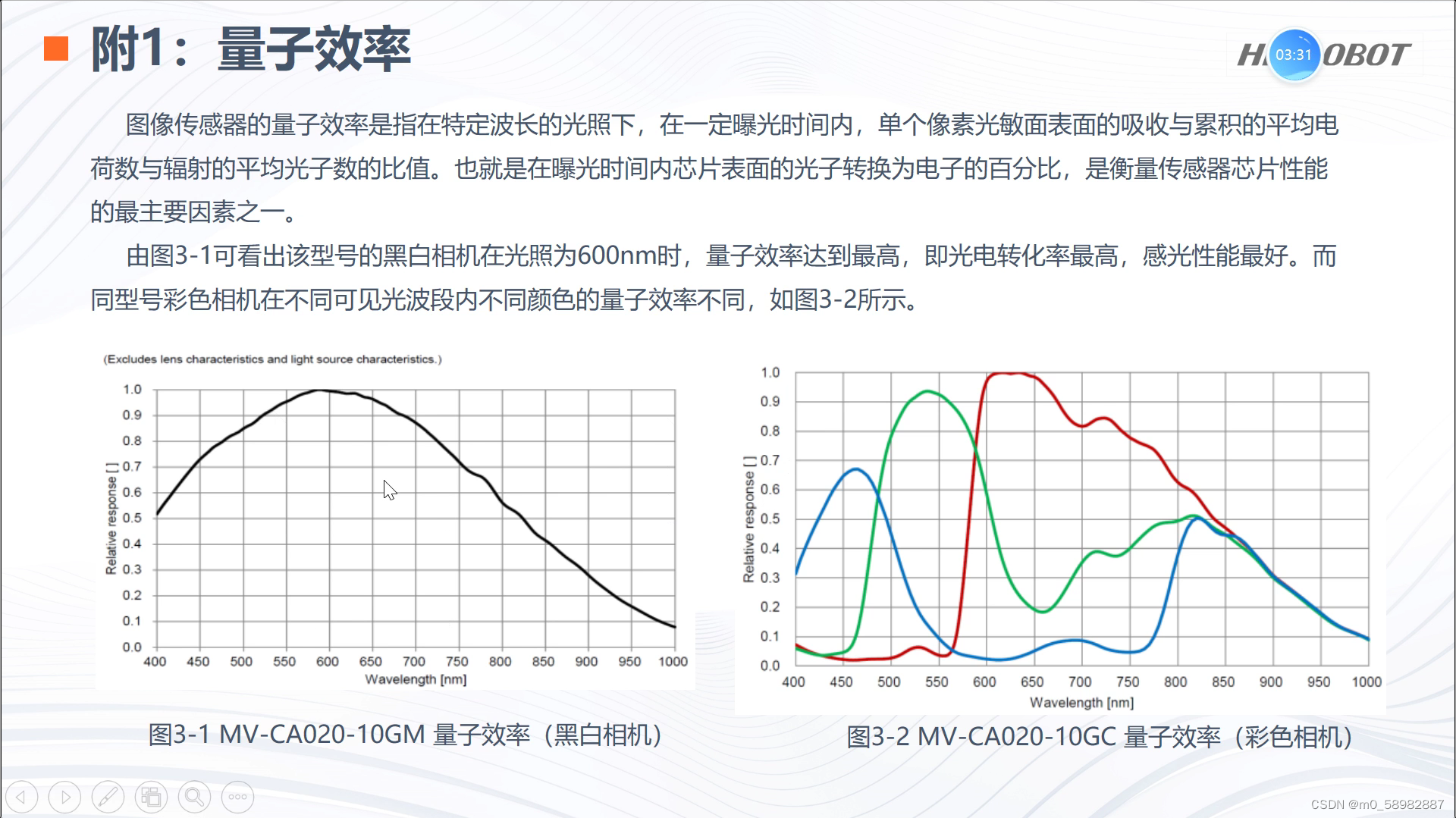
从上图曲线看,黑白相机感光芯片在受光600纳秒时转换效率最高,而彩色相机每种颜色的转换时机和效率最高值是不一致的。
根据我的猜测在拍摄彩色图片时,如果在550纳秒时记录图像,那么相机在红色的呈现上面会不是很好。
Smear(漏光)
因CCD结构缺陷,再拍摄强光时,会出现左图的漏光现象,而CMOS不存在这种缺陷,由此看来在分析使用环境时,应注意这一点。

命名规格
海康面阵相机命名规则

海康线阵相机命名规则

海康红外相机命名规则

相机接口介绍


以下成本比较高


分辨率
分辨率决定着图像的精细程度,分辨率越高,成像越清晰。
在我们之前的按键手机,拍照后进行放大,会看到一个个模糊的小方框,这个就是因为分辨率较低,图像的细节没有被感光芯片记录。图像越清晰,占用的内存也就越大。
分辨率 = 水平方向像素数 * 垂直方向像素数
ROI功能
在我们进行图像识别时,如果取景范围比较大,相机硬件又没法继续放大,我们可以在取景画面标注一片区域,告诉相机,我只需要这个范围的图像,其它请忽略。
指定ROI区域是有一定好处的,相机接收的画面较小,处理速度就越快,但分辨率就会变低,图像精度降低,所以,根据实际需求使用。
曝光调整
曝光有两种方式,软曝光(相机内部处理)、硬曝光(调整镜头),用于提高画面亮度,使拍画面更清晰。
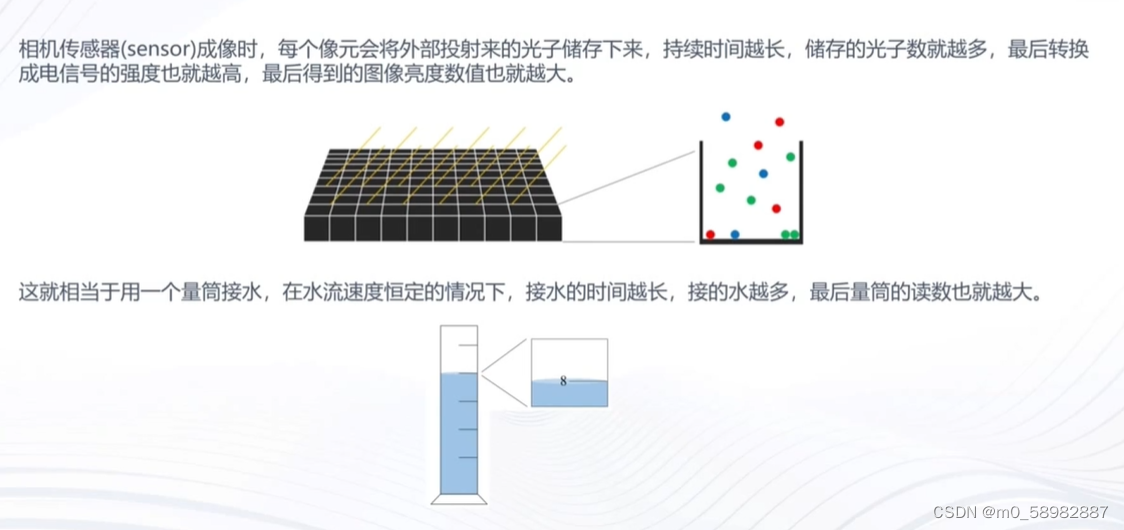
曝光时间
相机在拍照时会记录环境光,
曝光时间是指感光芯片暴露在环境的时长,时间越久感受到的光就越多。
需注意:
Exposure Auto(自动曝光)节点可能在触发模式下被隐藏,即部分型号相机不支持触发模式下自动曝光。
曝光方式
不光快门有全局和卷帘,曝光也有区分全局曝光和卷帘曝光。
如果被拍摄物体移动较快,不适合卷帘曝光。
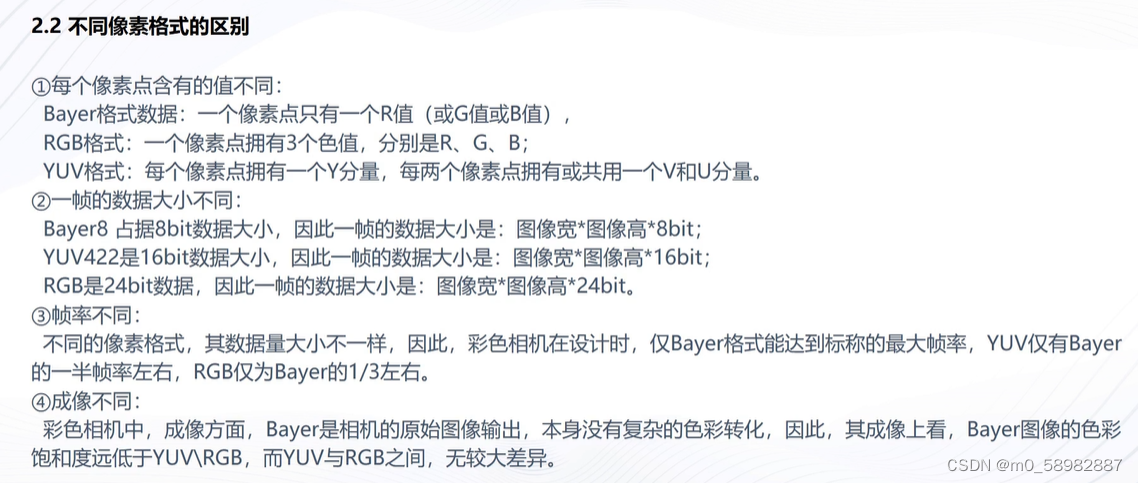
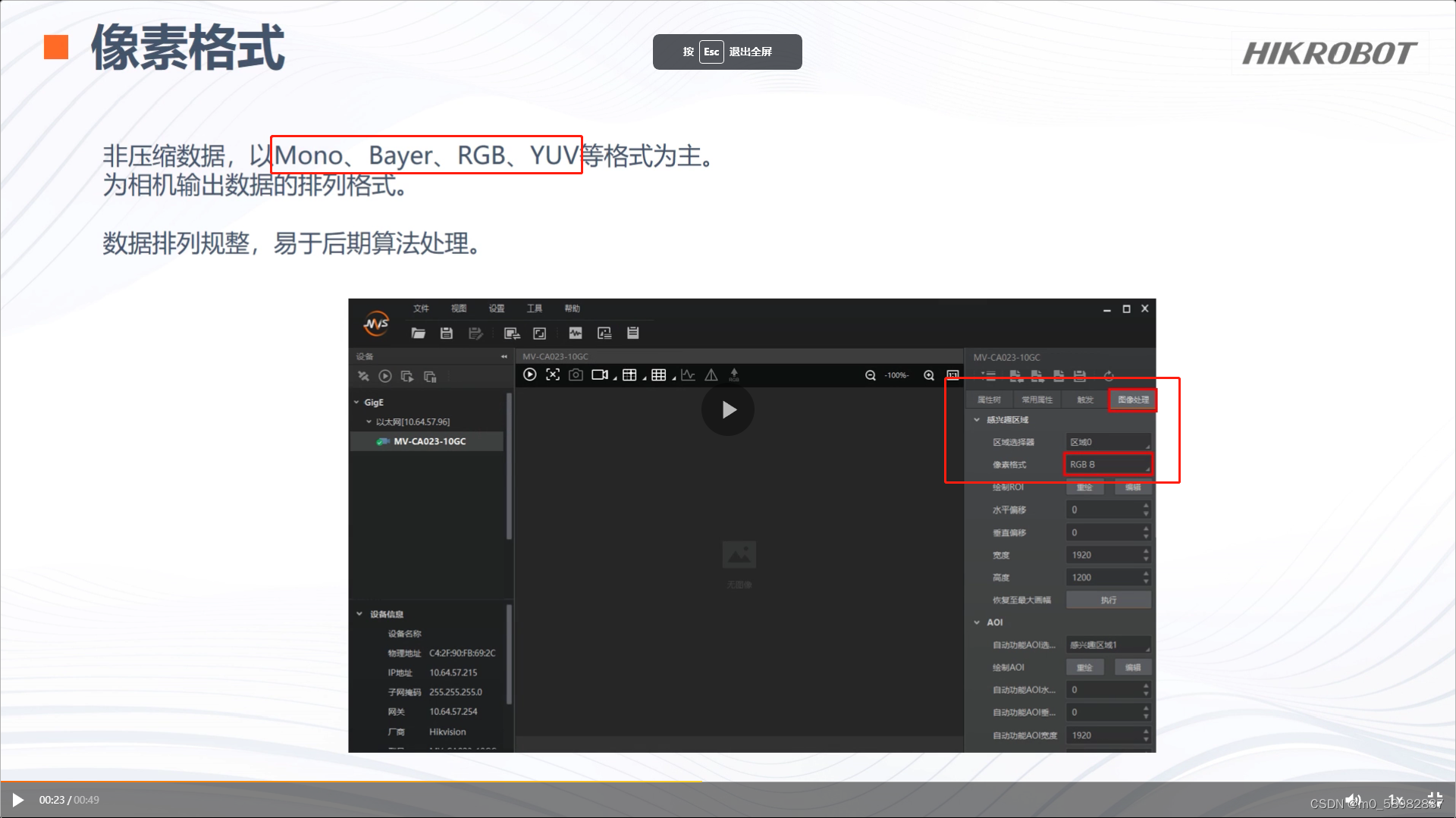
像素格式
像素格式即图像的色彩,有Mono、Bayer、RGB、YUV等。
不同相机支持的像素格式也不同,一般的相机都是RGB彩色、Mono黑白。
比如:Mono 10 ,第一个标识黑白,第二个数值标识位深,10就是把最暗和最亮中间分成10个梯度,数值越大,画面的对比度越好,单位是bit。
扩展知识,一般位深数据用16位bit来表示,Mono 10,占用10个bit位,会有6个bit位空闲,我们可以在后面增加packed来使用12bit存储器来存储。
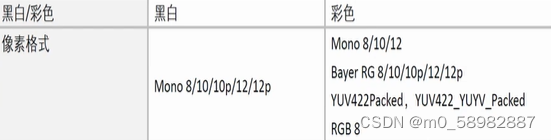
根据下图可以看出来RGB是数据量最大的。
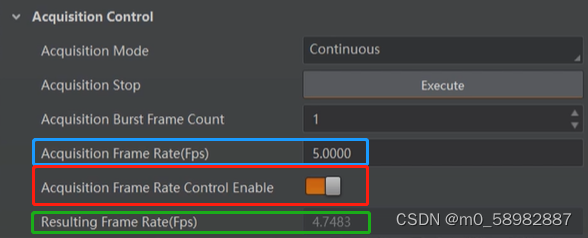
帧率
打游戏的同学应该熟悉fps,即画面每秒的刷新次数,相机帧率越高,拍的图片就越多,

可以在帧率控制中打开帧率控制使能(红色),拍照帧率设置为蓝色,显示帧率为绿色。
影响帧率的因素
每一帧的读取时间;
曝光时间太长;
像素格式,颜色越丰富,帧率就不会高;
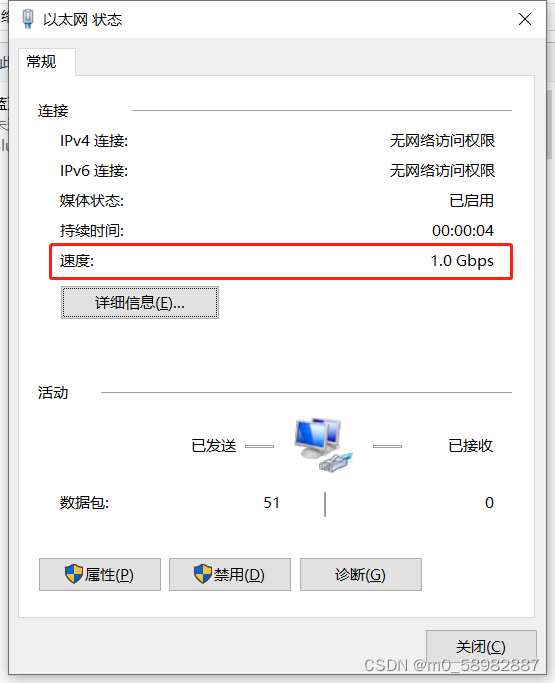
带宽,网线的传输速率也会影响到帧率;
ADC位深,画面质量越高,帧率越低
解决方法
使用图像压缩技术,降低每帧大小;
修改像素格式;
调整曝光时间;
检查数据包大小,
检查网线速率(在控制面板-更改网络适配器选项)
用户参数存储
相机可以保存4套参数,其中一套为相机出厂值,不可更改,也就是说用户可控的参数就3套。
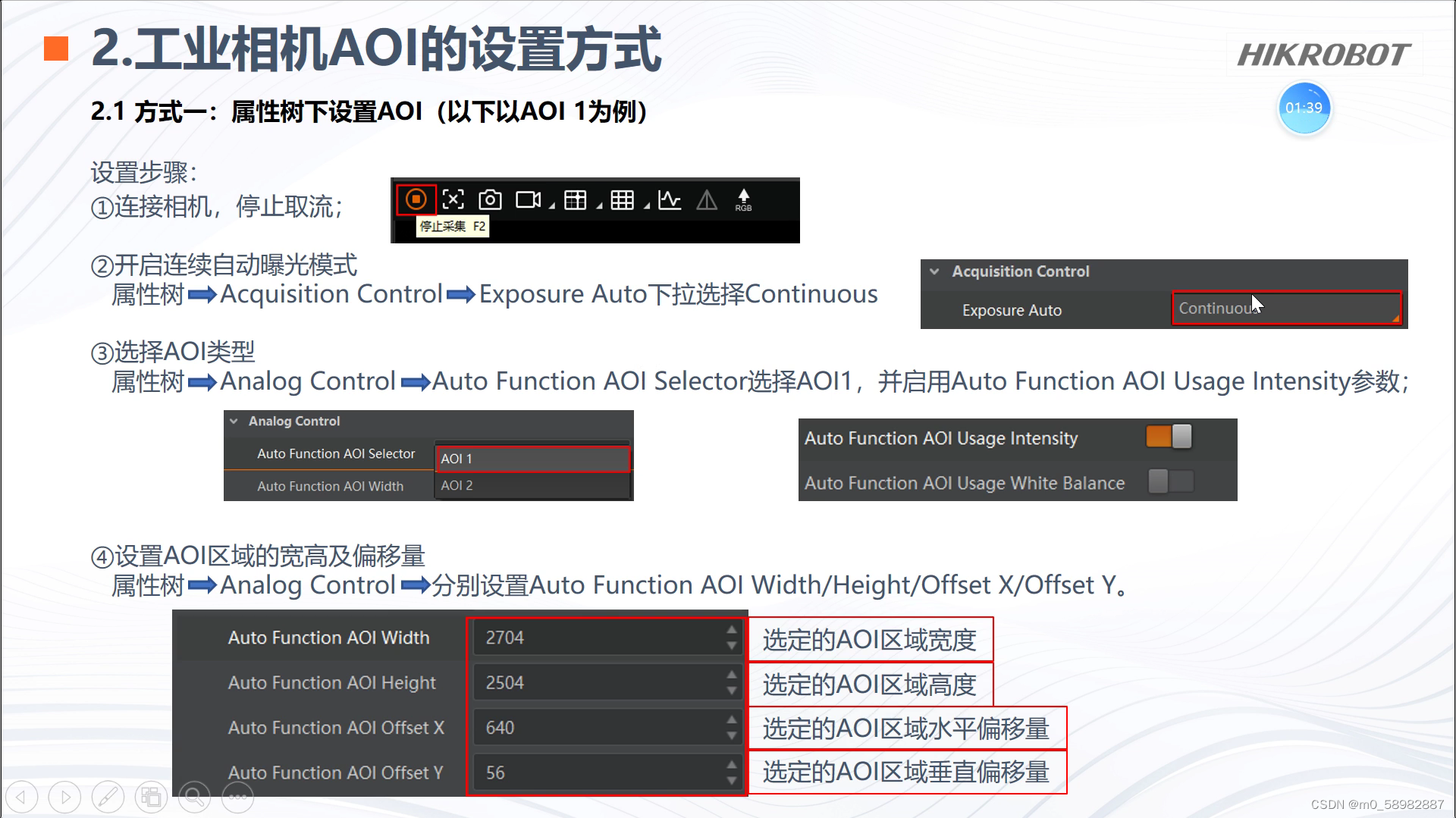
AOI
选定一个AOI区域,可以对选定的区域进行画面亮度的调整,如果是彩色相机还可以额外调整白平衡。
在使用AOI之前,先确定连续自动曝光是打开状态,打开后设置好AOI参数,相机会根据算法自动增加亮度。
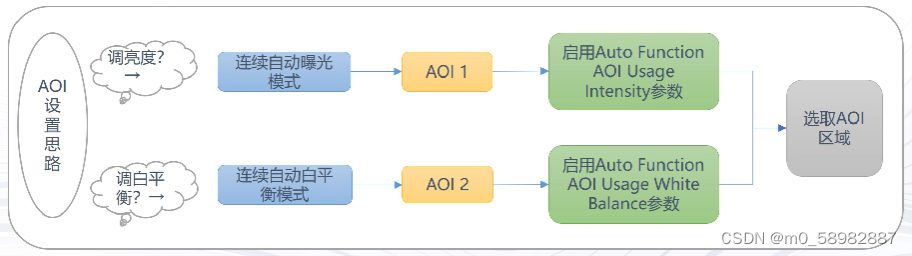
设置过程

AOI亮度调整效果

在没有光源或环境光微弱时,效果还是非常不错的。
AOI白平衡调整效果

在某些情况下彩色图片失真时,可以通过调整白平衡来进行优化,使画面更符合需求。
Binning
Binning,中文解释是装箱,就是将多个像素点进行合并。
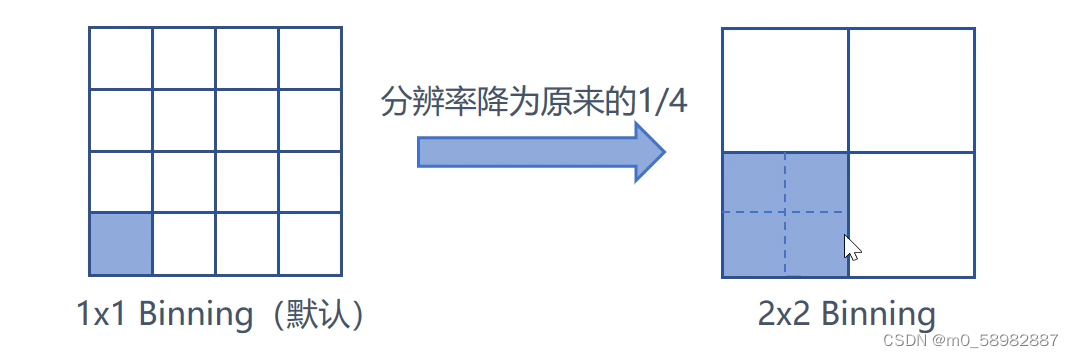
从上图我们可以看出来原来的4*4的分辨率,合并后变成了2*2,我们在合并时可以选择垂直合并或水平合并,
优点:
降低分辨率后传输文件更快;
提高图像信噪比,从而提升图像质量;
分辨率降低后细节减少,画面亮度更高。
不同相机的binning功能不同,使用时按实际情况来设置。
效果展示

Binning VS 下采样
有基础的同学应该知道下采样功能,也是类似的降低分辨率的方式来减小图片的体积和分辨率,不过两者还是有区别的,下采样是从多个像素中抽取一个像素,而Binning是将多个相邻的像素叠加,使画面亮度提升,
虽然看起来Binning更强大一点,但是下采样是可以提高相机的帧率的。
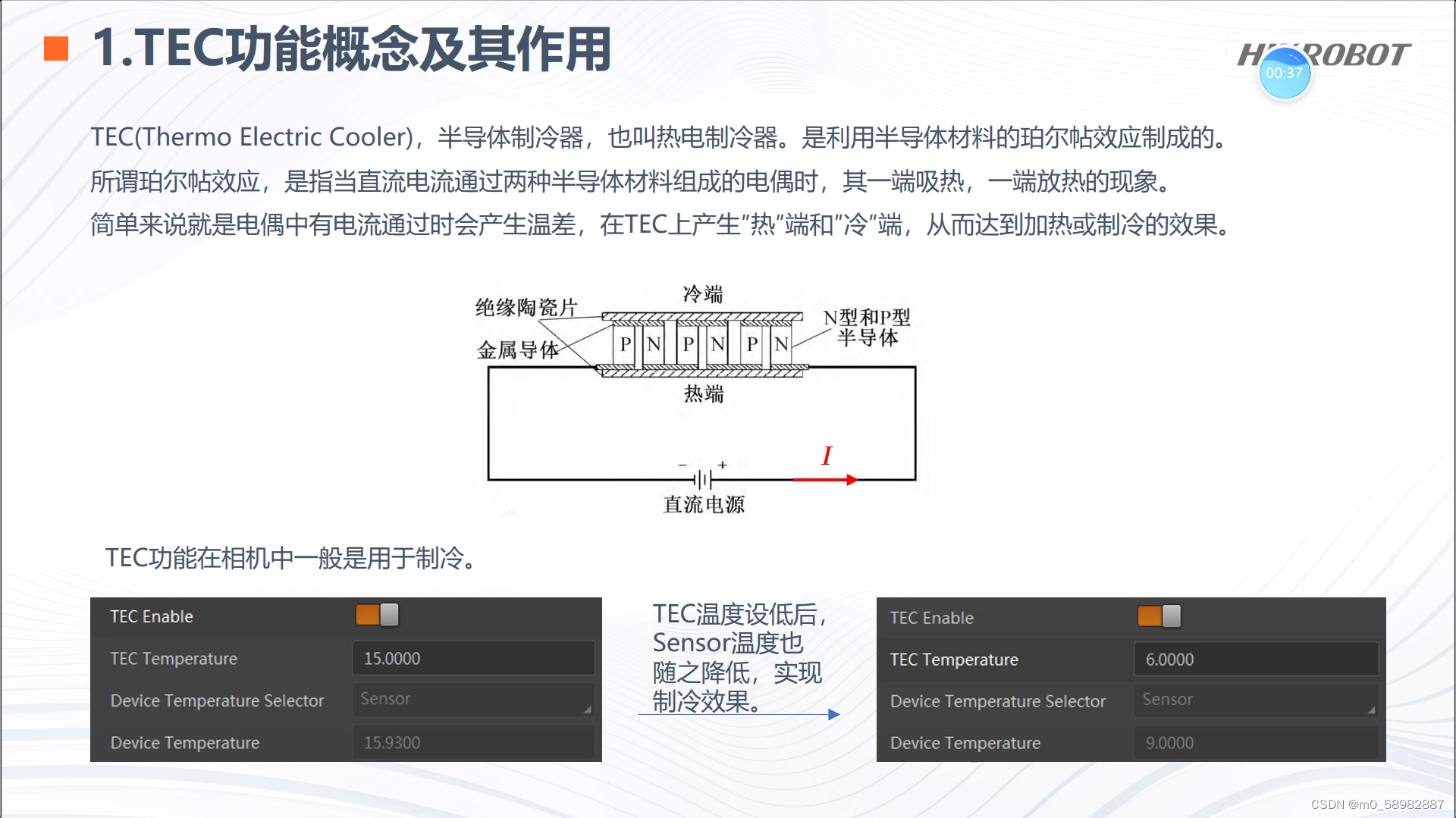
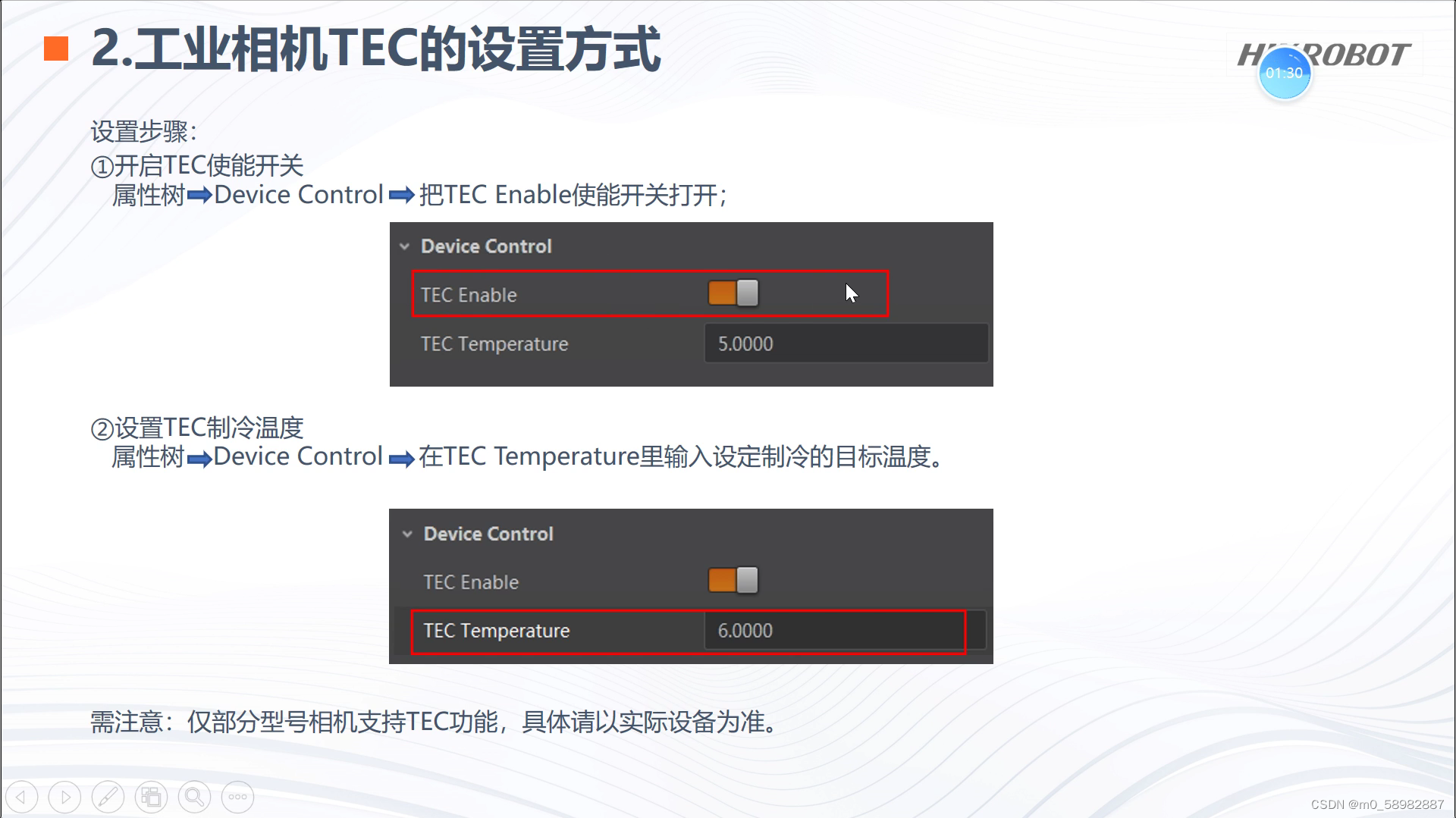
TEC
用物理的方式,给相机降温。
原理
物理化学好的可以了解一下,
使用步骤
不是所有相机都有这个功能,按实际情况。
采集模式
相机拍照有两种模式,单帧/连续。
单帧:只采集一次,即拍一张照片;
连续:相机开始工作后,会实时拍照,每秒拍多少张,由实时帧率决定(帧率和网线、分辨率等有关系);
在属性中找到相关设置,并按需要调整。
测试模式
通过设置,让相机回传一些测试画面,通过接收端对画面的分析,来确认相机及其配件的可靠性。
镜像
相信大家都不陌生,将画面水平翻转,或者垂直翻转。
部分相机可能没有垂直翻转;
当像素格式为Bayer格式时,使用镜像功能会改变像素格式,但不影响图片效果。
原图

水平翻转

垂直翻转

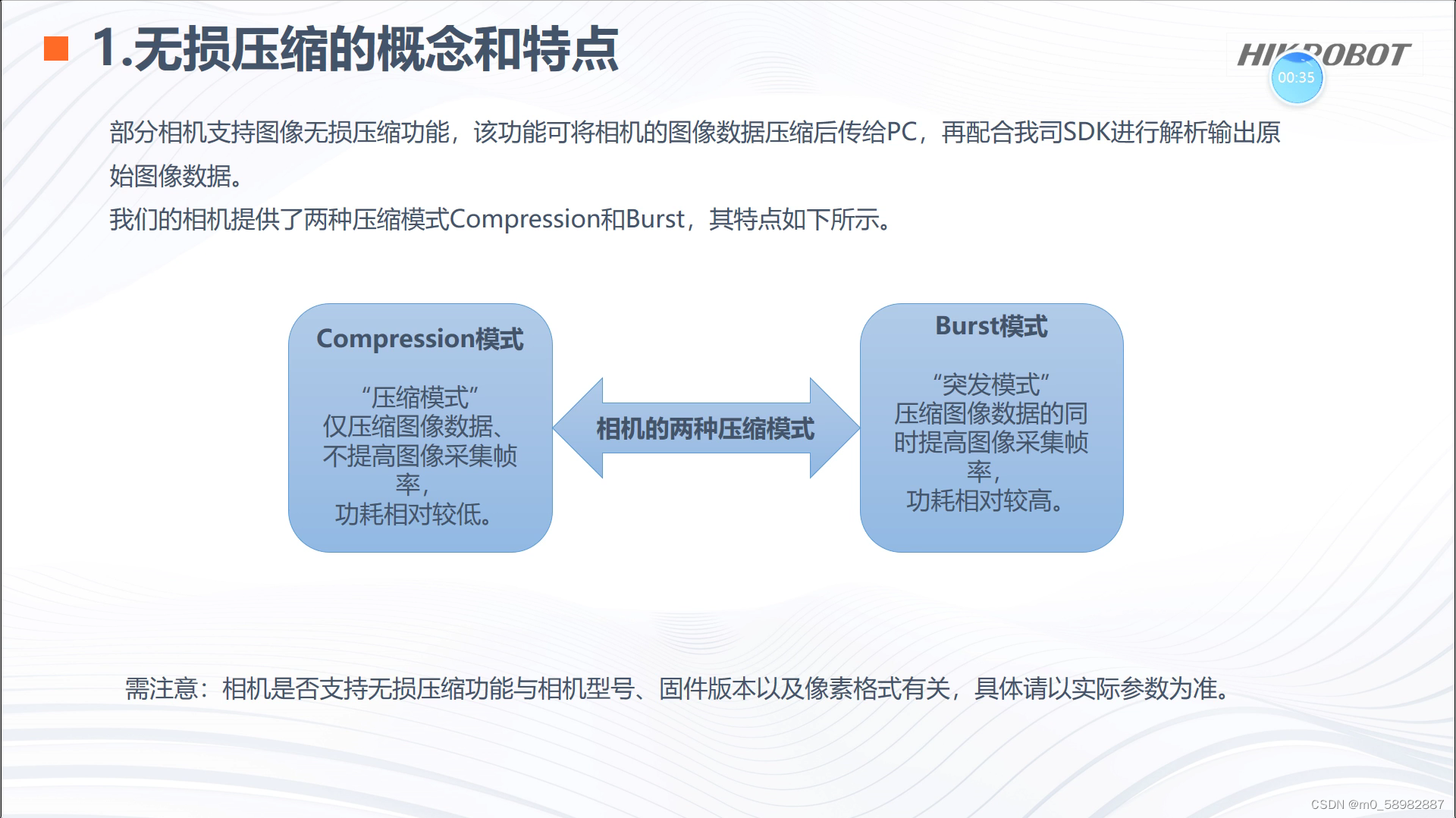
无损压缩
部分相机支持无损压缩,经过压缩后的图像体积会变小,再经过PC端的海康SDK进行还原,即可提高相机的传输效率,相当于将电脑的性能牺牲了一部分,但影响不大。
从图片来看,两种模式各有优点。
效果演示
通过下图看出,相机带宽是有明显下降的,但Burst模式功耗高会让相机温度升高。

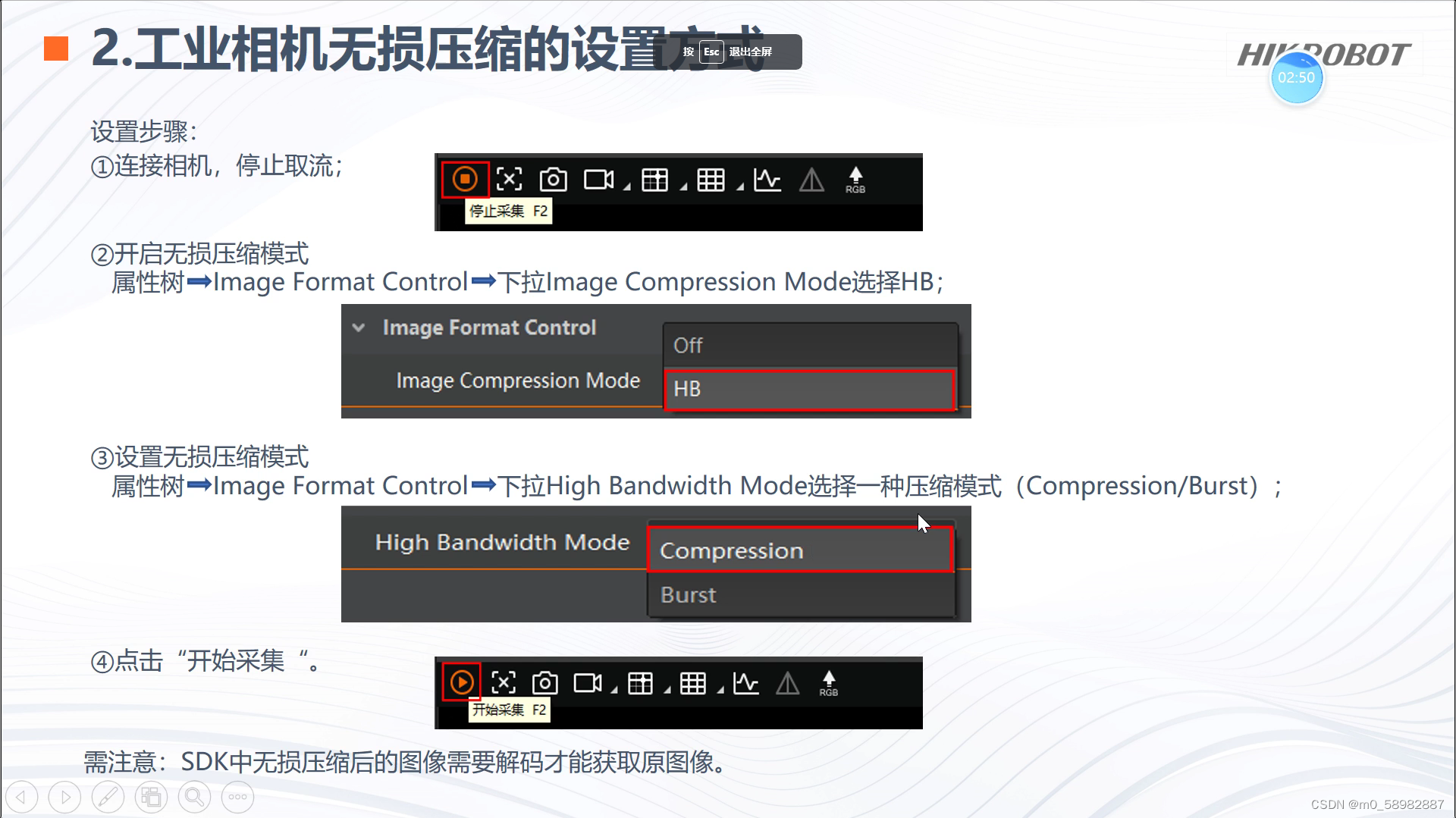
设置步骤
下采样
采样,即取其中一部分,拍出来的图片,根据设置参数,对图片的对应像素进行舍弃,比如原来4个像素点,我只要一个像素就够了。
要注意的是,水平像素和垂直像素采样参数和图像的丛横比要一致,否则图像发生畸变。
原理
提高相机采样速度。
缺点:降低图片分辨率,提高相机帧率。

效果
从效果图可以看出,图像亮度没有降低,帧率和带宽降下来了。

Bayer
Bayer图像,是相机感光芯片上最原始的数据,即每个像素感受到环境光的强度。
感光芯片(Sensor)上的每一个像素点只能感受光的强度,在每一个像素点上加上特定的滤光片,使它只能感受一种光的强度,那感光芯片收到的原始数据就叫做Bayer图像;
我们的世界是五颜六色的,所以需要加上其它颜色的滤光片(三原色:黄、绿、红),因为人眼对绿色比较敏感,绿色感光像素比红绿感光像素要多;
以一个2X2的像素阵列举例,其中有2个绿色,红蓝各1个。通过相机内部拟合为对应颜色,得到一幅彩色图像。

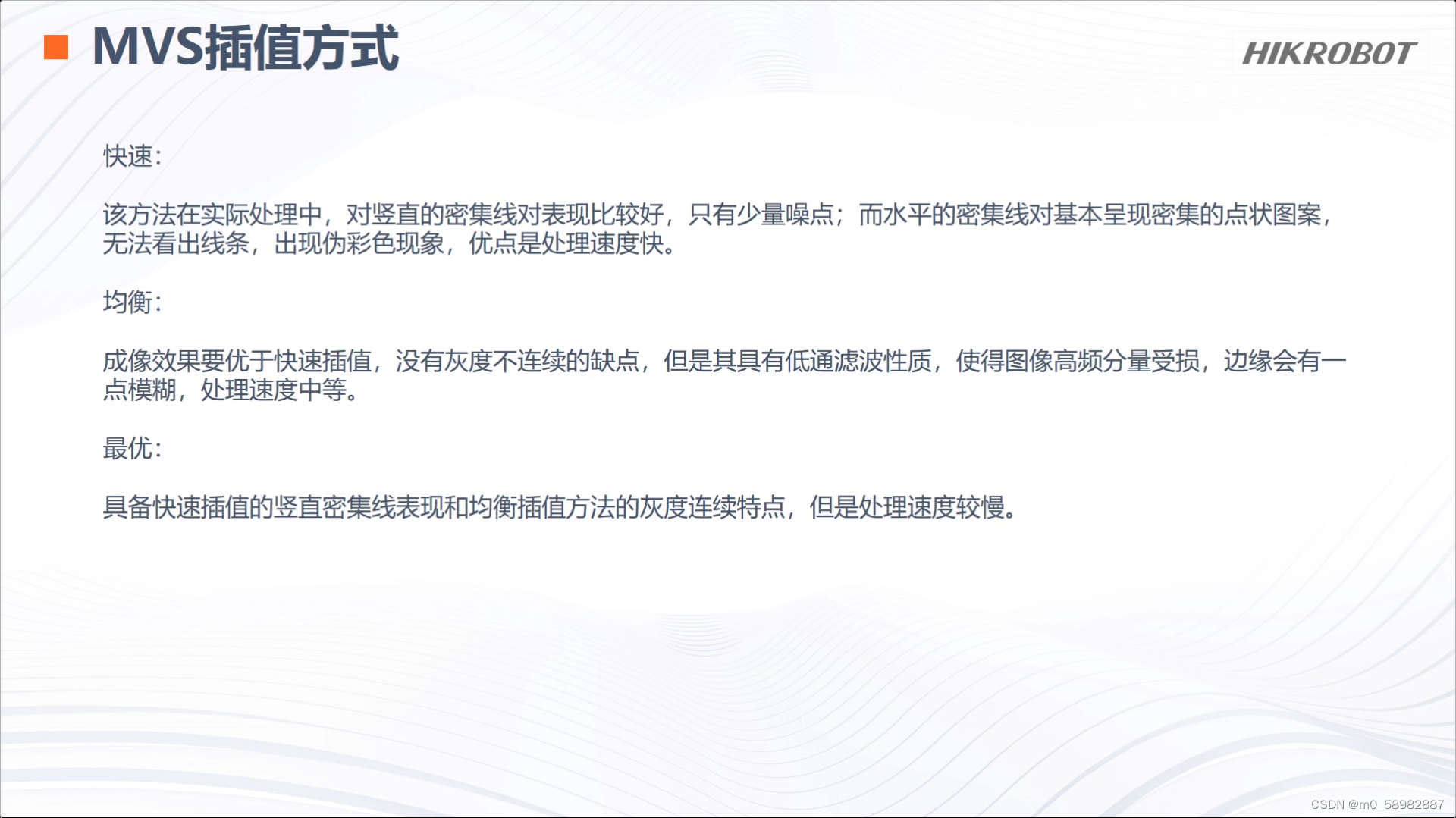
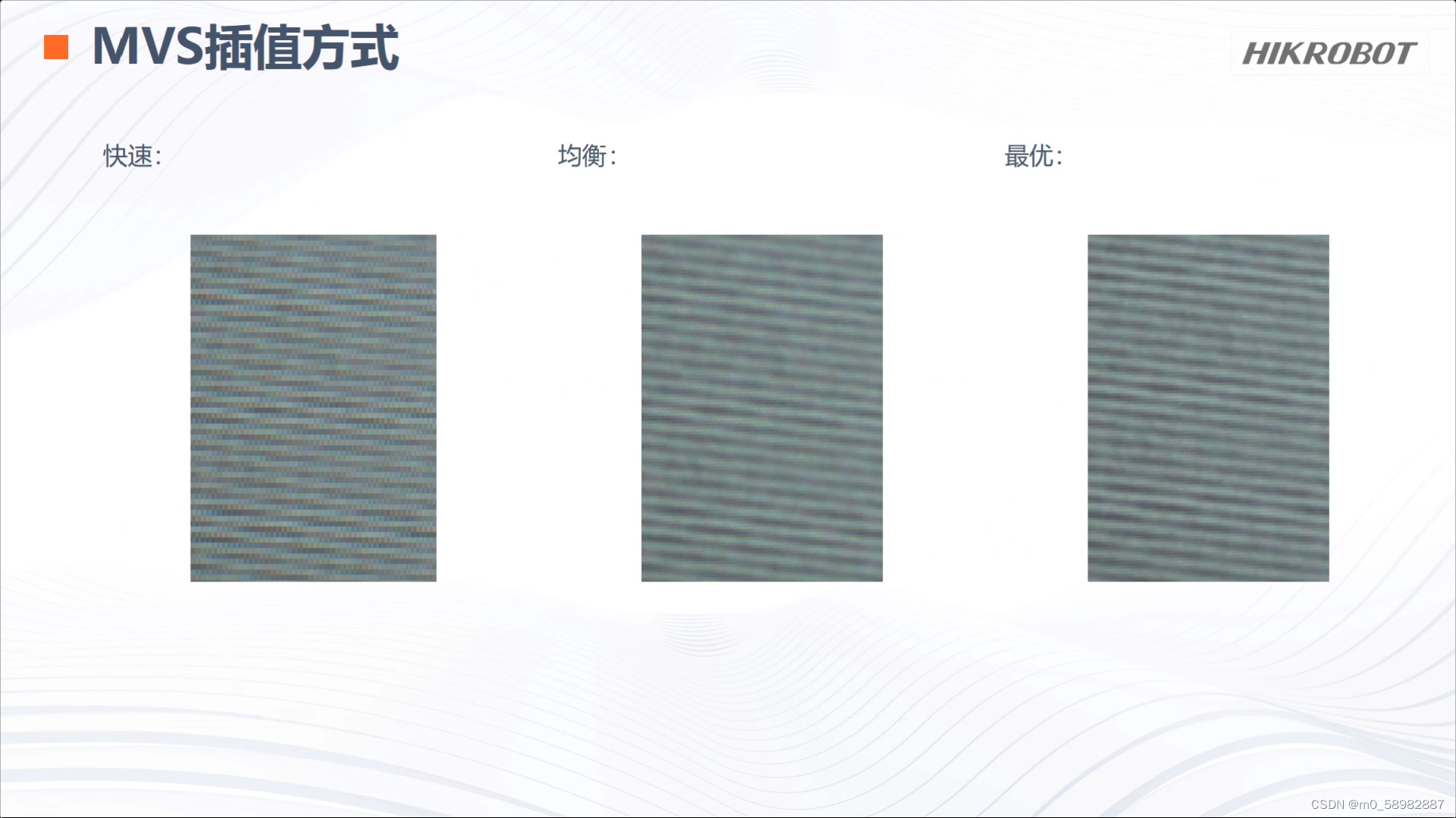
Bayer插值方式
我们可以手动调整插值方式,分别有快速、均衡、最优;
在调整后,经过对比图像,选择最优的插值方式;
结果对比
从下图可以看出来,最优的插值方式是最好的,纹理特征比较明显。
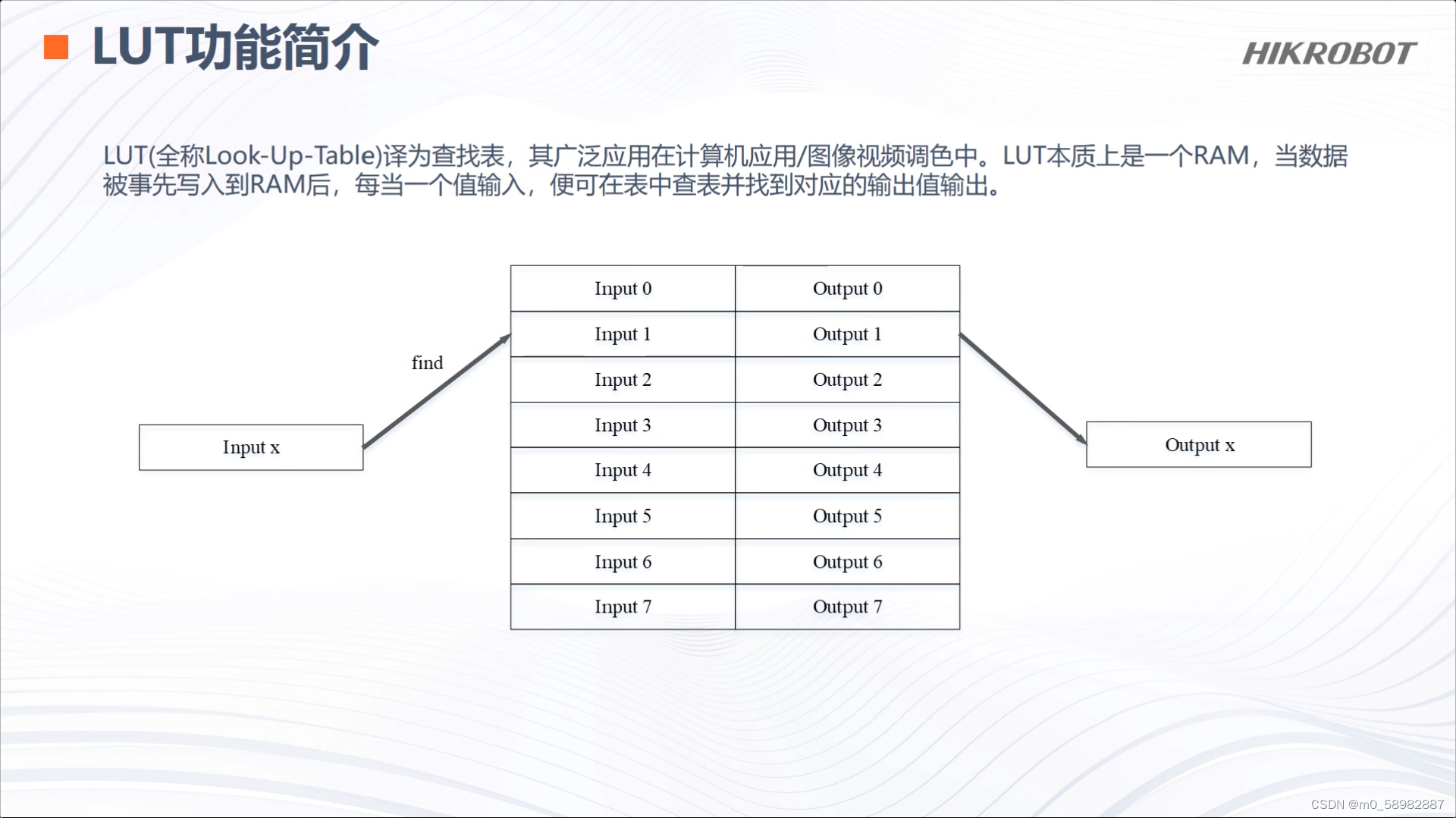
LUT
全称(LookupTable)查找表,即告诉计算机需要什么颜色,计算机通过对照表输出对应颜色,我们可以通过修改此表来使拍到的画面呈现出想要的颜色,比如想要灰度强一点就可以把其中的input数据该成想要的output数据。用来强化想要的,弱化不想要的。
效果图
设置步骤

结果对比
修改前

注意右下角折线变化
修改后

注意右下角折线变化
白平衡
如果我们的图片拍出来红光特别重,应像我们分析结果,我们可以通过调整白平衡,使画面的红光减弱,呈现出正常的颜色。
原理解释(不一定要钻研透)

调整步骤
分析
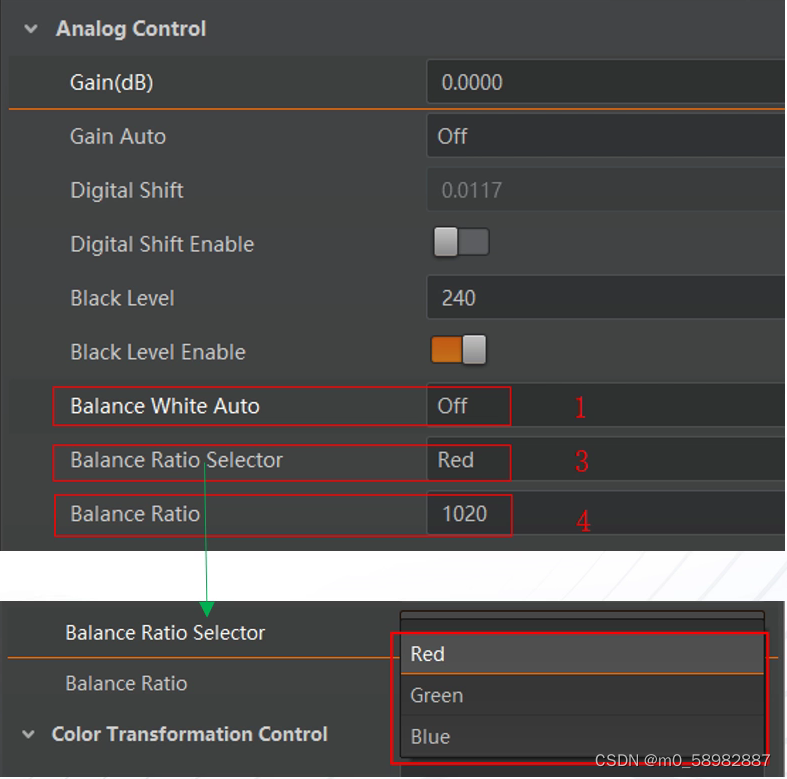
打开RGB功能

将鼠标悬停画面非曝白处(不能过于白),查看RGB值,可以看出来第一个数值比较高,分别代表红色(R)、绿色(G)、黄色(B)。

得出结论,需要降低红色敏感度。
设置步骤

效果展示
调整前

调整后

如果自己调整后画面还是不太好,可以降低一下其它颜色的数值,多尝试一下。
如果相机拍出来和实际颜色不符,怎么办?
手动调整白平衡参数,或者拿一张白纸,放到画面上,观察色差,直到修正到正确的参数后,即可完成校正。
曝光
工业相机和普通相机不同;
普通相机可以用机械快门来控制感光芯片的进光时长;
工业相机使用的是电子快门,控制感光芯片的进光时长,就叫做曝光时间,非曝光时间进的光会释放掉,即不记录图像;
我们可以看出,工业相机没有机械快门,拍照的速度肯定是比普通相机要快的。
需要注意运动场景下曝光时间不易太长,会产生拖影,卷帘快门也一样。
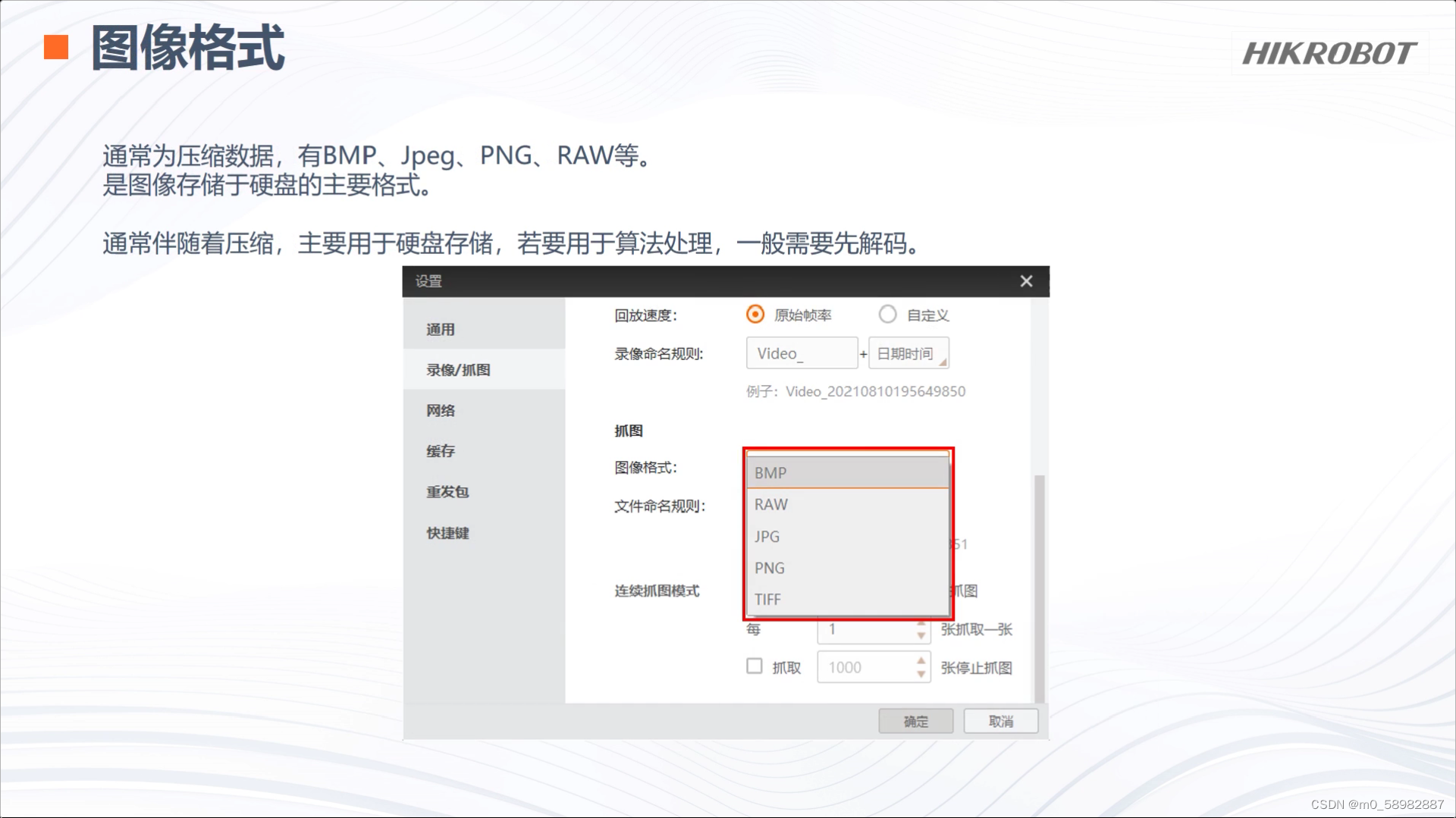
像素格式
像素格式可以调整图像的颜色
图像格式可以调整相机拍照后的文件格式,即后缀,如图片保存后,图片1.JPG
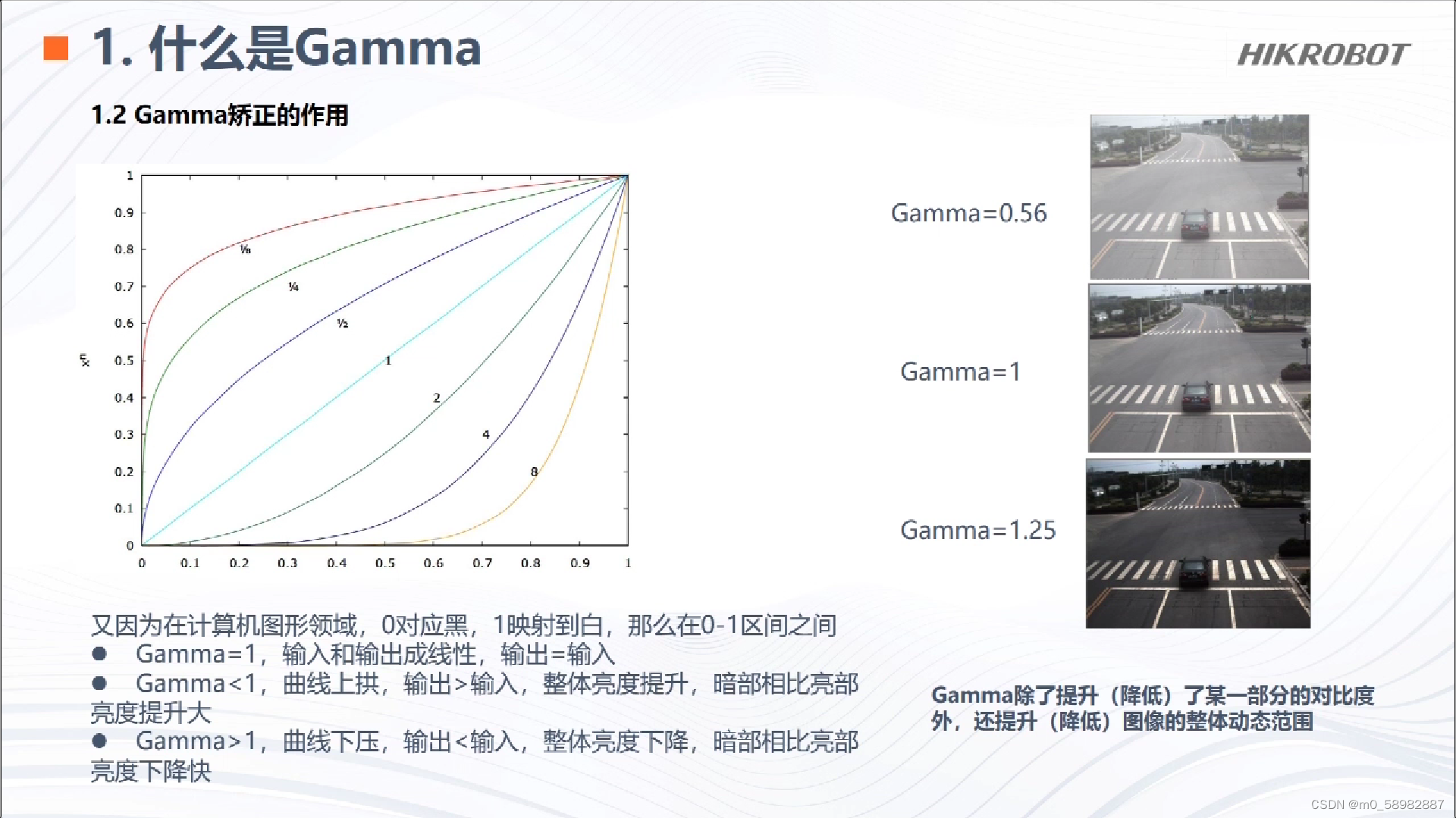
Gamma校正
调整Gamma值可以画面看起来更贴合实际,值越高明暗处的对比度就会越大,值越低会看起来有种套了层薄膜的感觉。
为什么会出现

如何调整

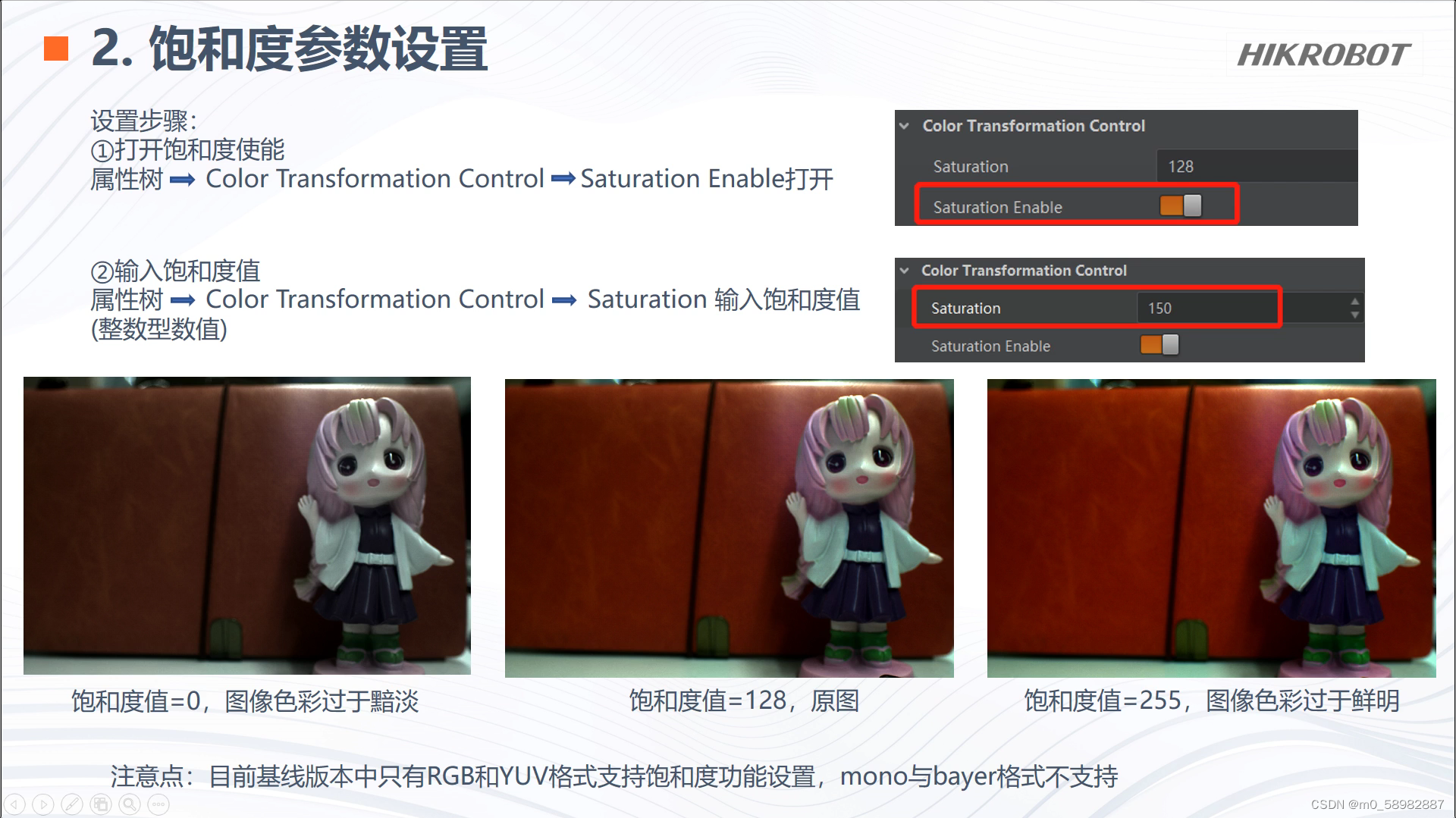
饱和度
饱和度是指色彩的鲜艳程度,饱和度越高色彩越鲜明,饱和度越低会让图片显得暗淡。

当拍出来的照片不够生动时,可以调整饱和度。
调整方式
注意:工业相机不是美颜相机,不要在意图片的色彩,只要方便识别,就是好相机。
黑电平
相机在拍照时,部分像素没有被光线照射时,也会有输出电压,因此在图像处理时要减去这部分电压,消除误差。
调整误差就叫做黑电平,我们可以调整图像输出时的灰度值偏移量,决定传感器在不感光时的灰度值。
值越高,图像越暗,值越低,图像会模糊。

调整方式(一般不需要调整)

亮度
亮度会影响图像的清晰度,可以通过自动曝光来增加图像亮度
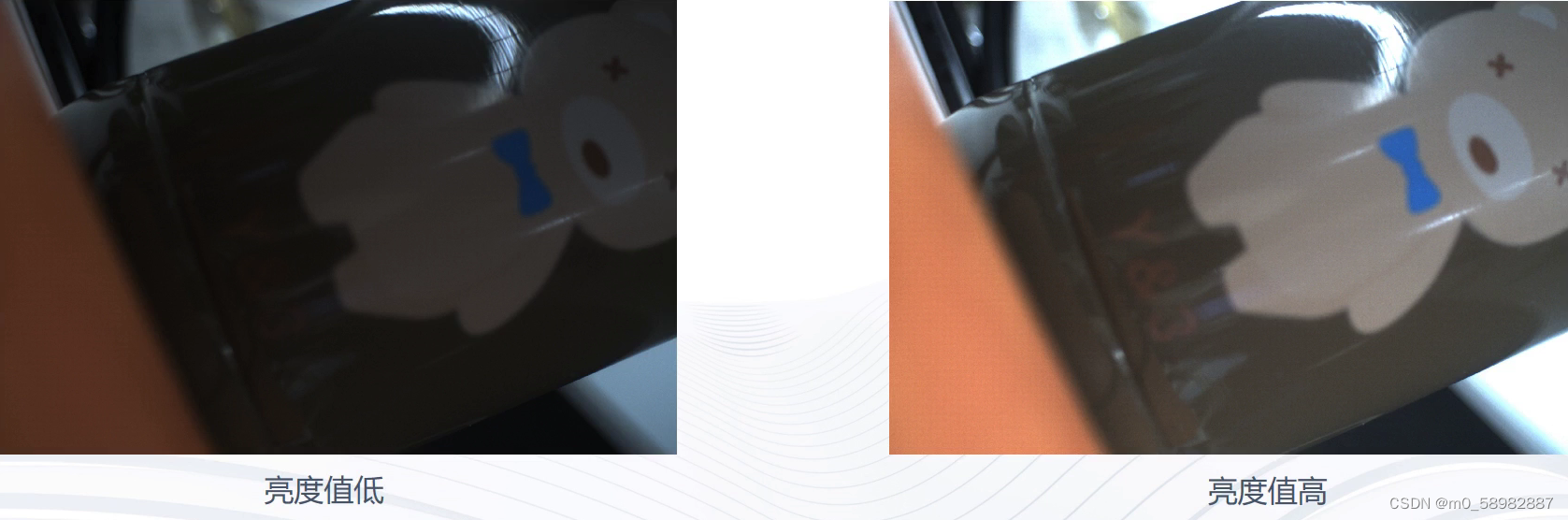
也可以通过增加外部光源,来使画面更清晰。
相机自动曝光可以选择一次和连续曝光,关闭自动曝光时可手动调整。

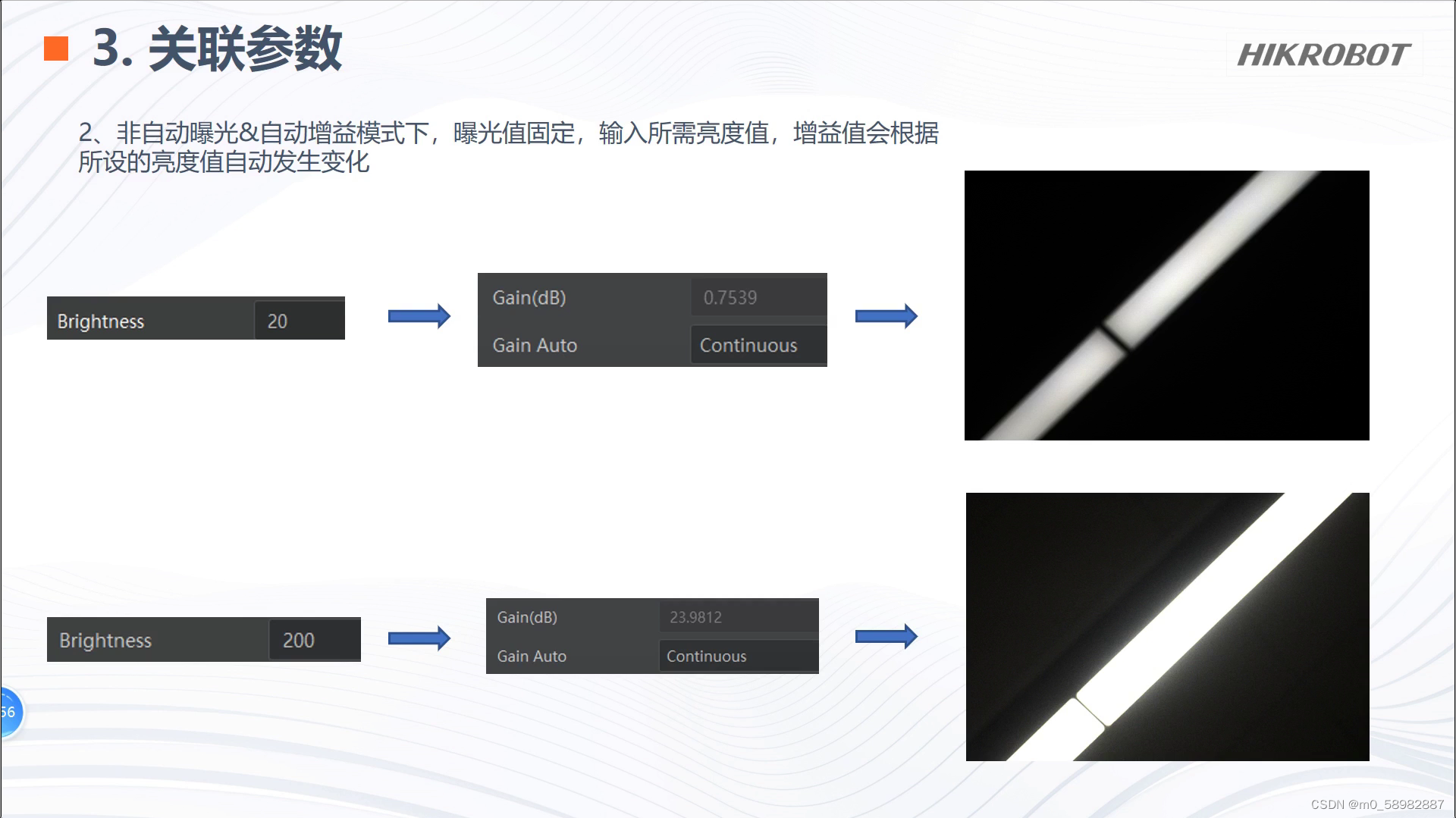
关联参数
在调整手动曝光参数时,曝光时间也会随比例调整。
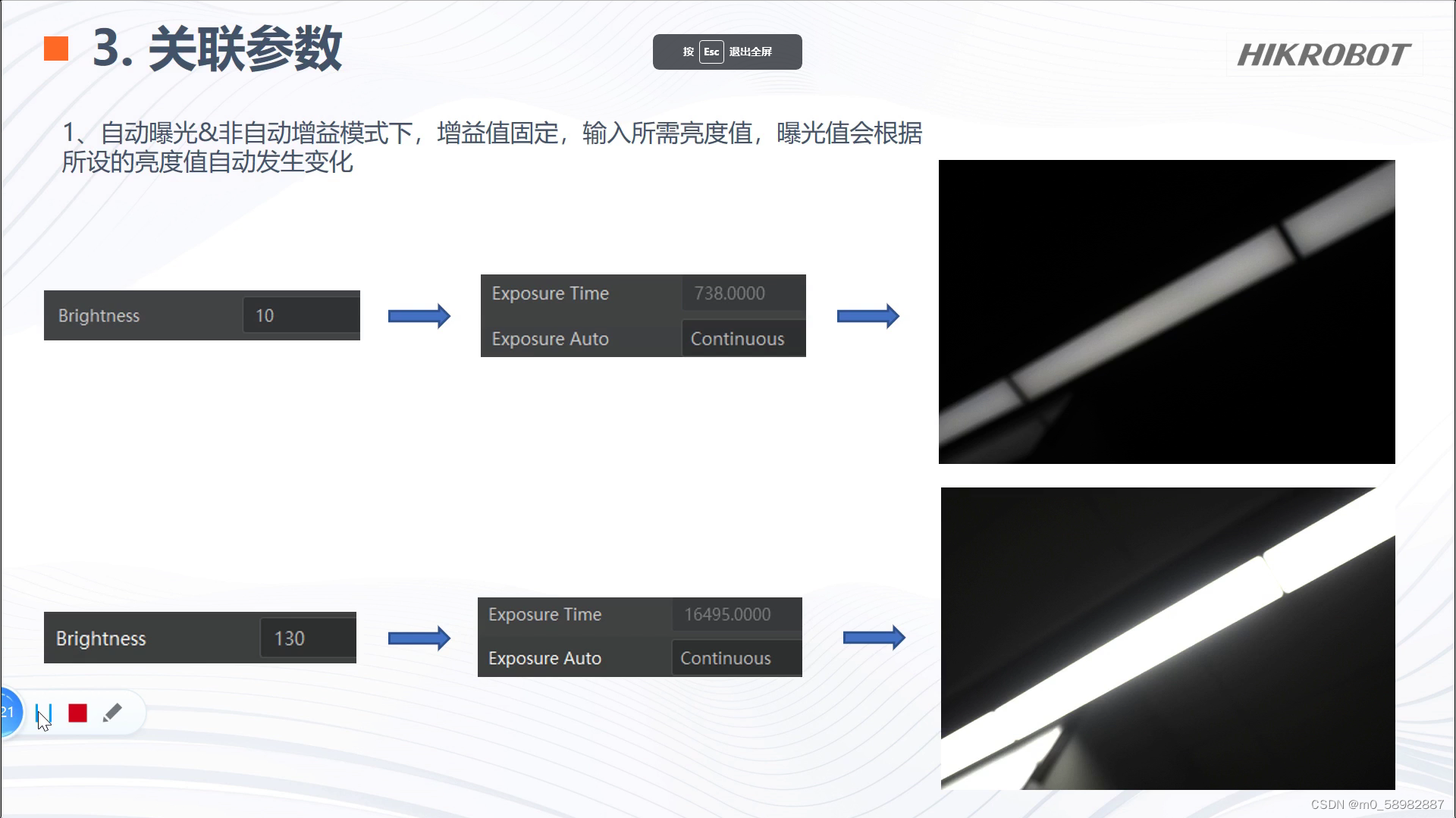
在打开自动增益时,也会随着调整手动曝光参数时而变化。
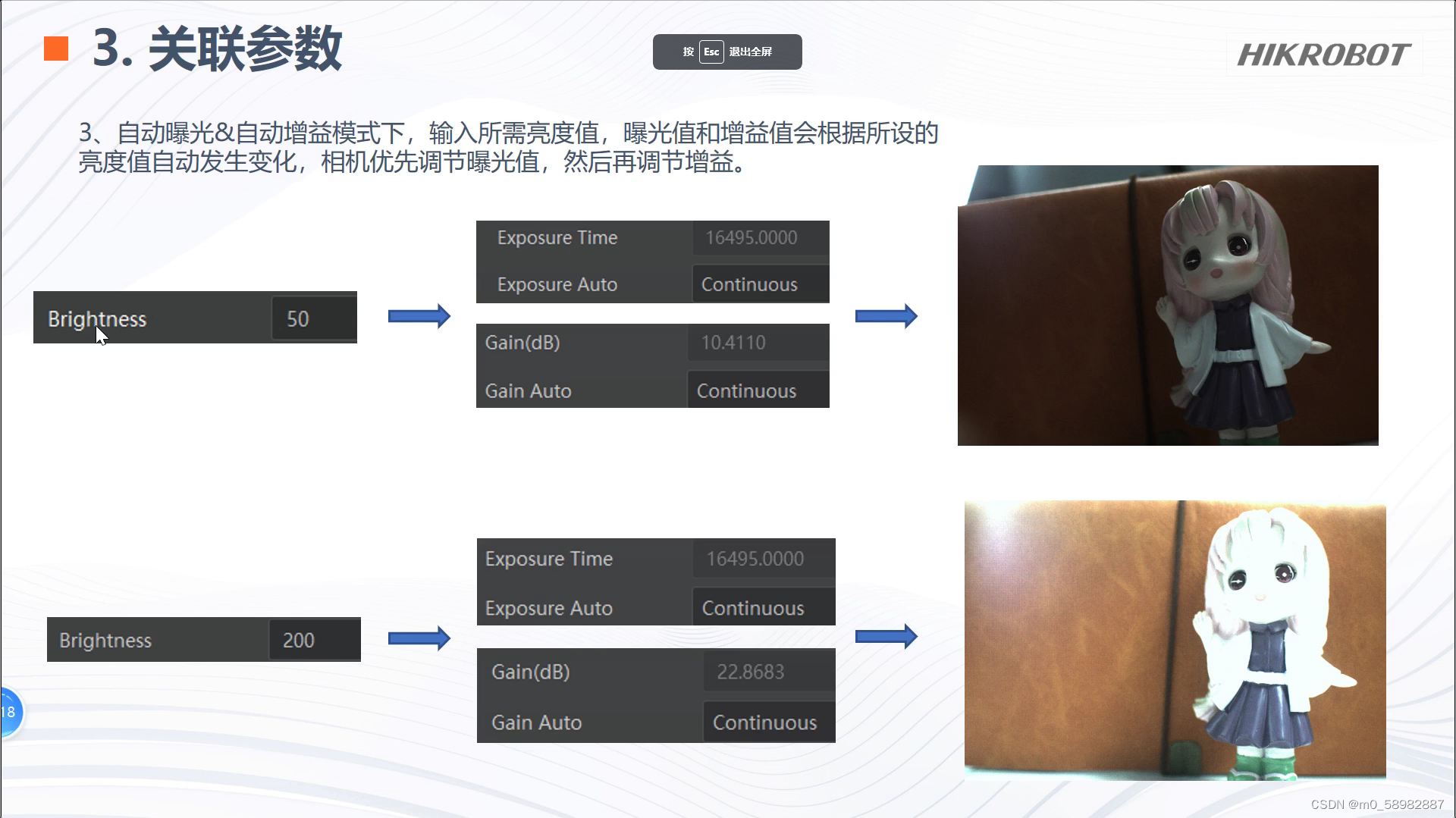
如果自动曝光和自动增益都打开了,会优先调整曝光,再修正增益。
锐度
增加两个不同物体的对比度,加强边缘的强度,过度锐化会使图像失真,噪声增加,视情况使用。

设置方法
通过增加锐度,可以让我们更容易识别物体的边缘,注意只有Mono(黑白)和YUV模式支持调整锐度。

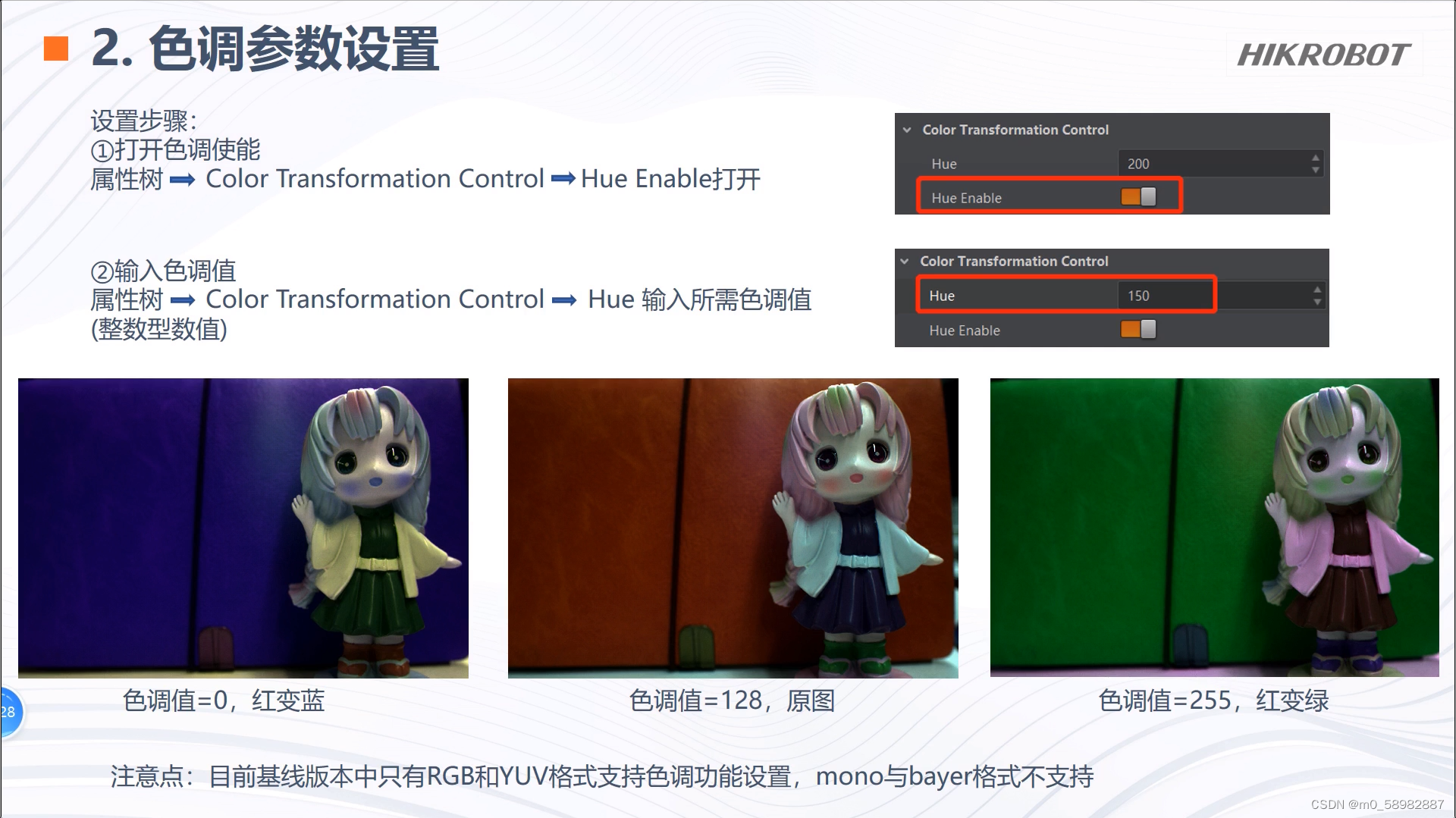
色调
调整色调可以使原来的红色变成蓝色(黑白不支持色调)。

如下图所示,调整色调为0,红变蓝。
图像质量评判标准。

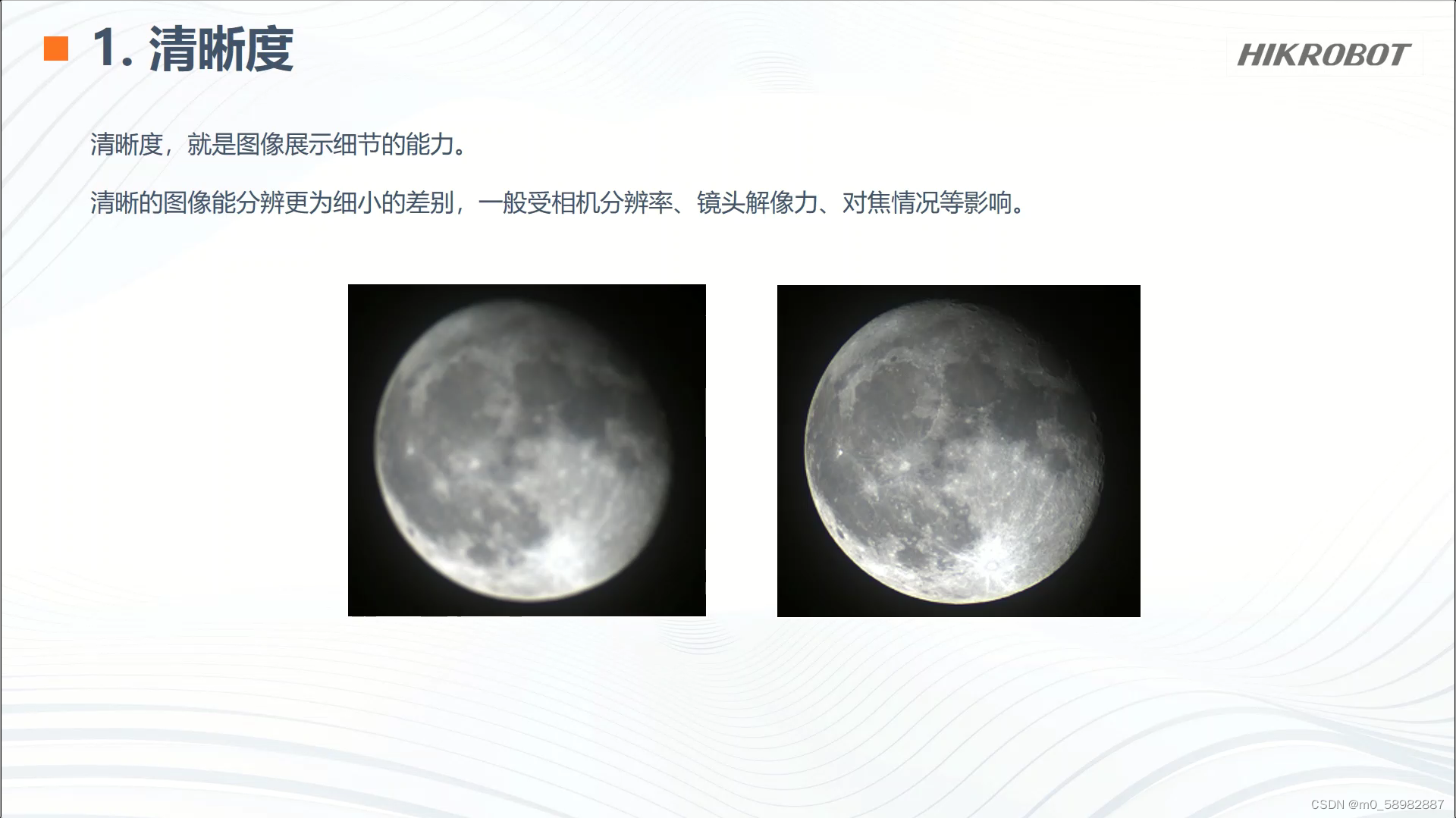
清晰度
从下图来看,右边的月亮是比较清晰的,但清晰不一定就好用(相对论)。
图像越清晰,图像数据就越大,影响计算机的处理速度,所以我们的相机像素不一定要很高,如下图所示,数据量较小时,自行车就可以完成运输,当数据量过大时,就需要升级装备了,升级意味着成本的提高。
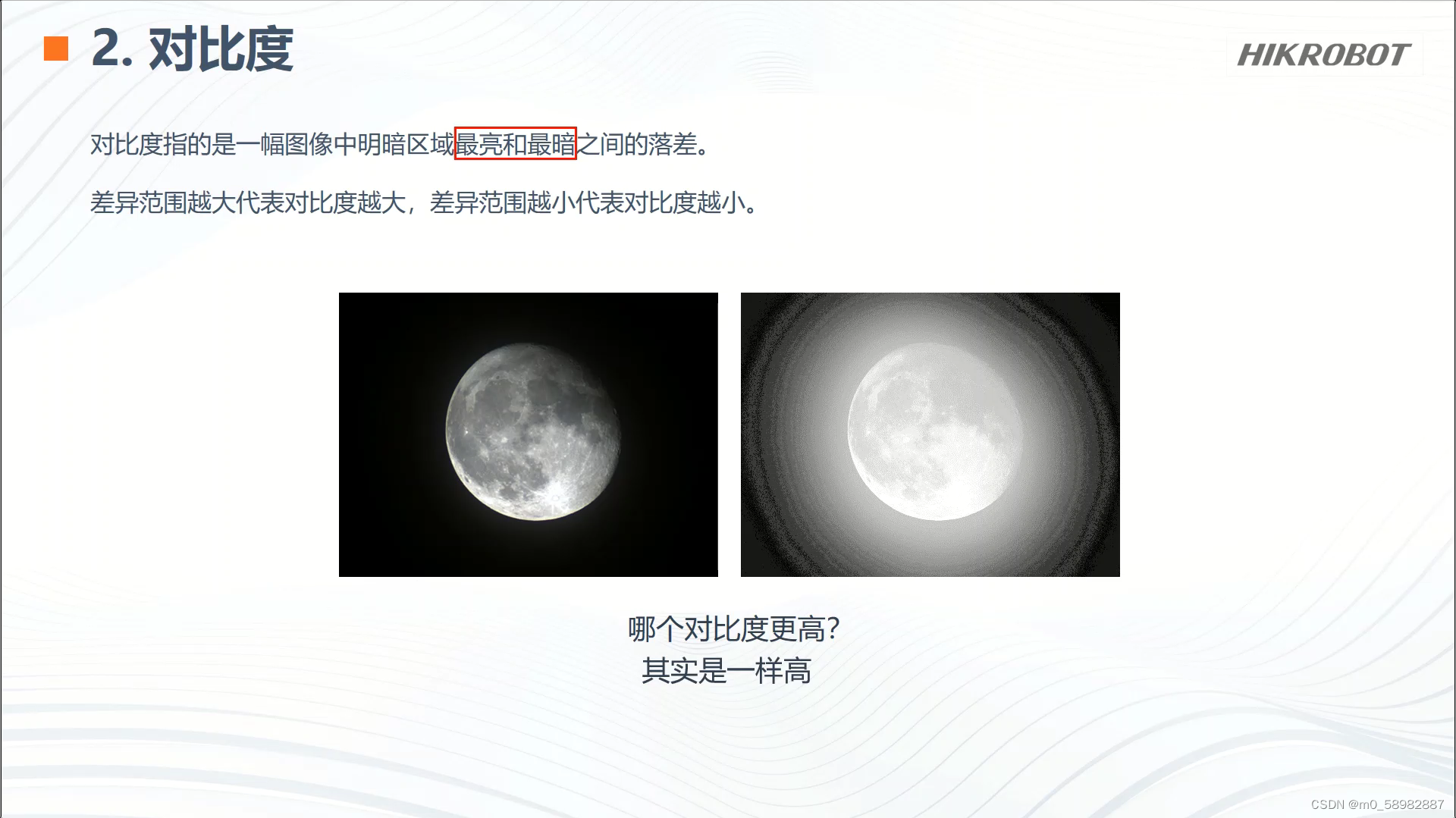
对比度
对比度是指图像中最亮和最暗的差值,差异范围越大,代表对比度越高。
观察下面两幅图片,我们下意识肯定会以为是最右边对比度比较高,实际两个对比度是一样高的,因为对比度是指图像最亮处和最暗处的落差,并不是图片的哪个固定区域,我们人眼会往事物(月亮)上面去看,但实际计算机并不认识月亮,只知道这片范围最亮。
图像在拍摄完成之后再去调整对比度会牺牲暗处的分辨率,来提高亮处的焦点。
色差
每个相机因传感器的结构,拍出来的颜色和人眼有差异,色差是正常的。
在判断色差时,要注意亮度的差别。

饱和度
饱和度可以让人眼看起来更生动。

亮度
亮度太低,会使反光度低的隐身,亮度太高,也会导致一些颜色隐身,视需求而定。
在判断色差时,要注意亮度的差别。

畸变
一般畸变是由镜头引起的,可以通过算法矫正。

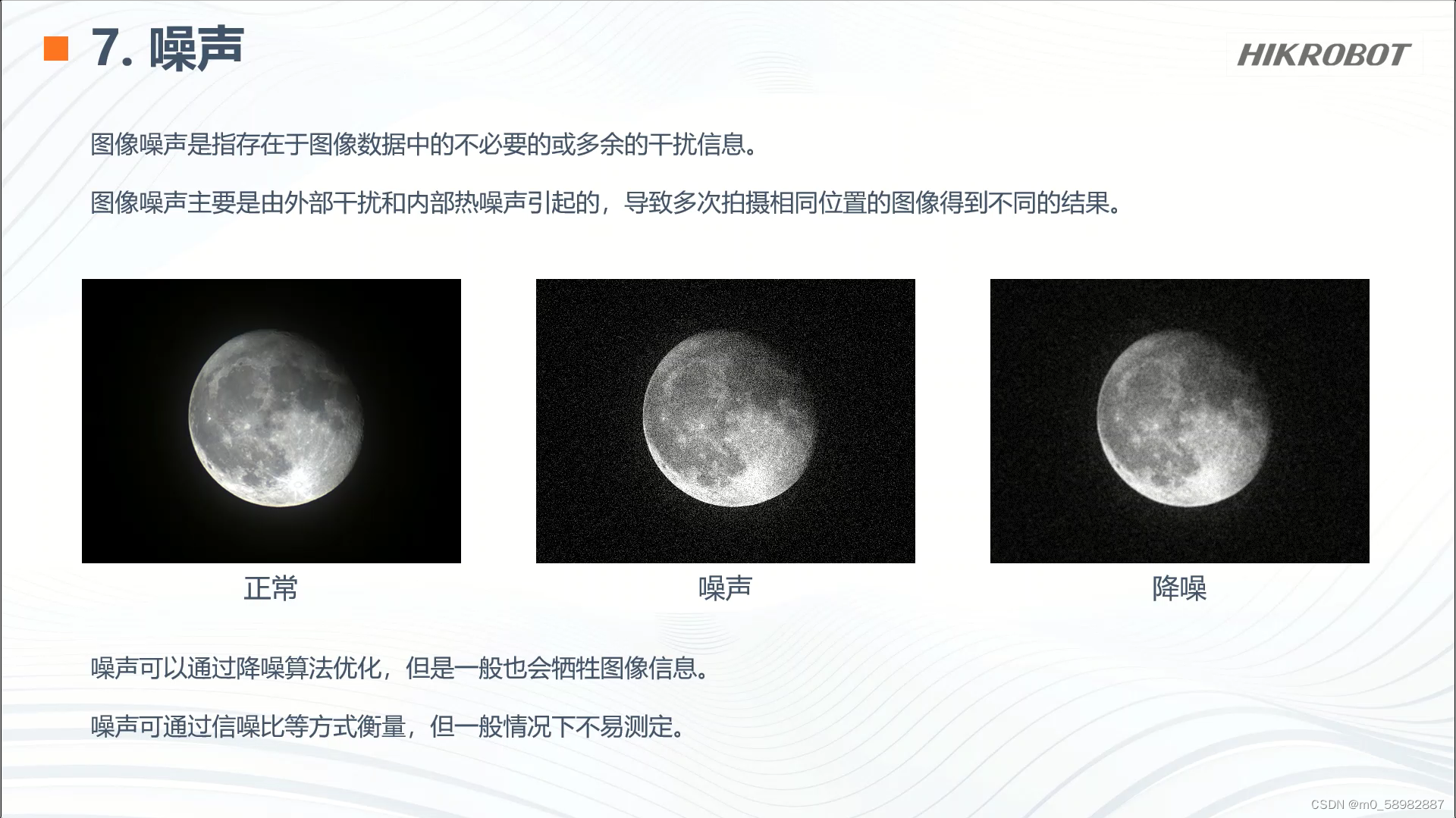
噪声
噪声导致拍出来的图像分辨率低,肉眼可见的模糊(马赛克);
引起噪声可能有镜头焦距、拍照时的抖动、内部热噪声引起的。
噪声可以通过降噪算法来优化,通过查看信噪比来得知噪声的大小。
增益
分两种,模拟增益和数字增益,数字增益比模拟增益的噪声要大,过大时画面会偏红。
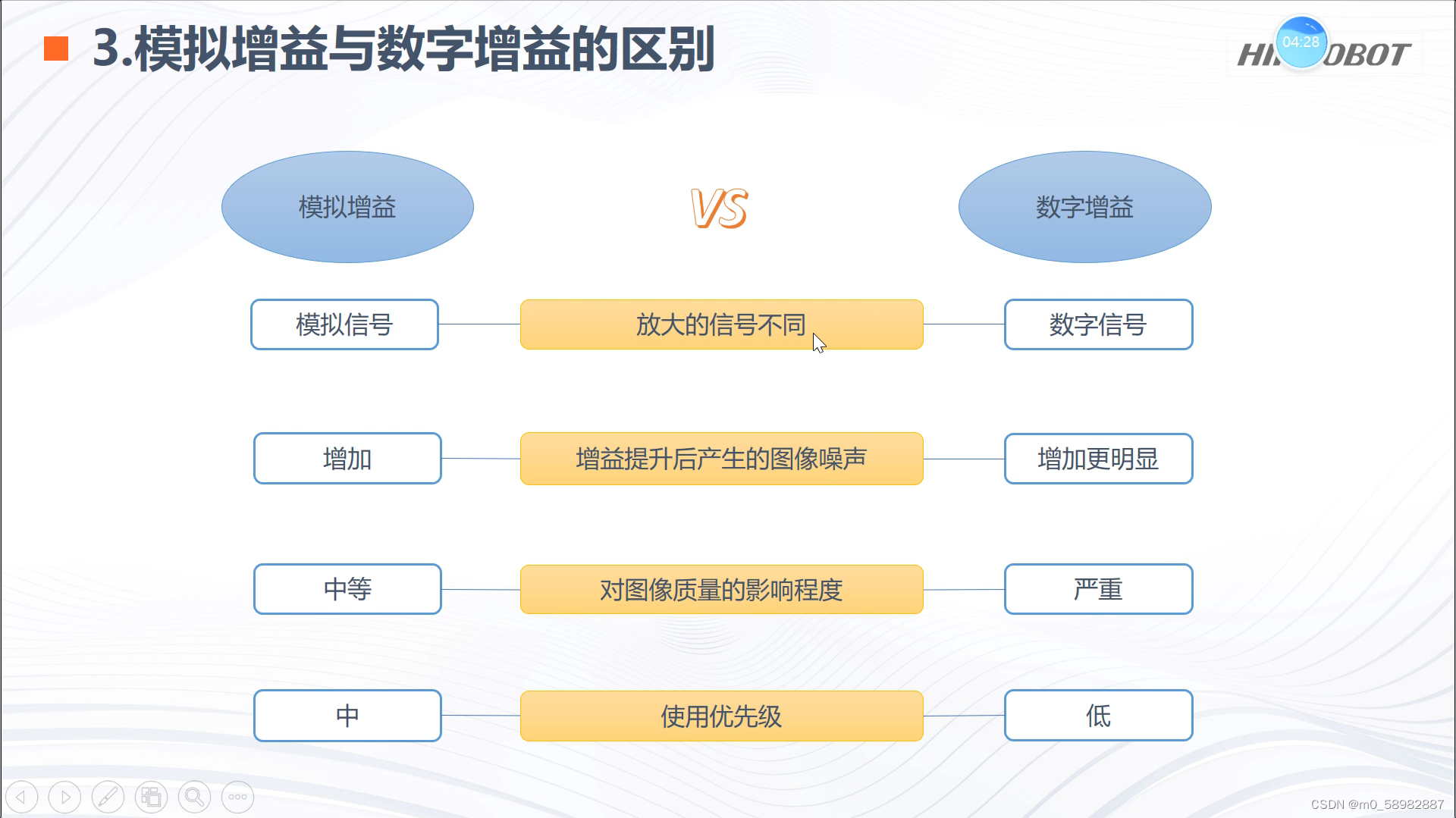
增益可以提高画面的亮度。

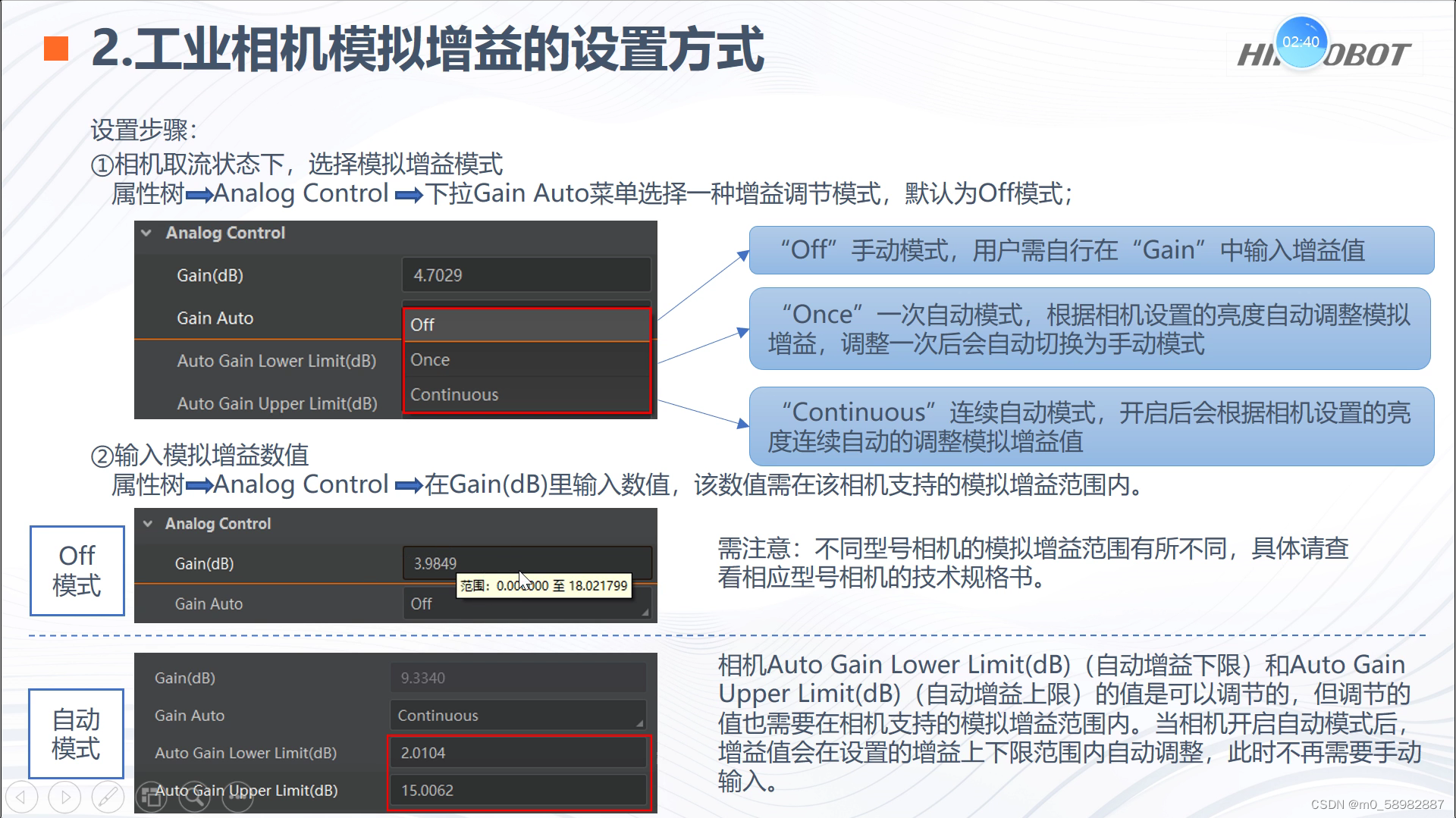
增益设置
模拟增益
数字增益

关联参数,亮度

外部接线
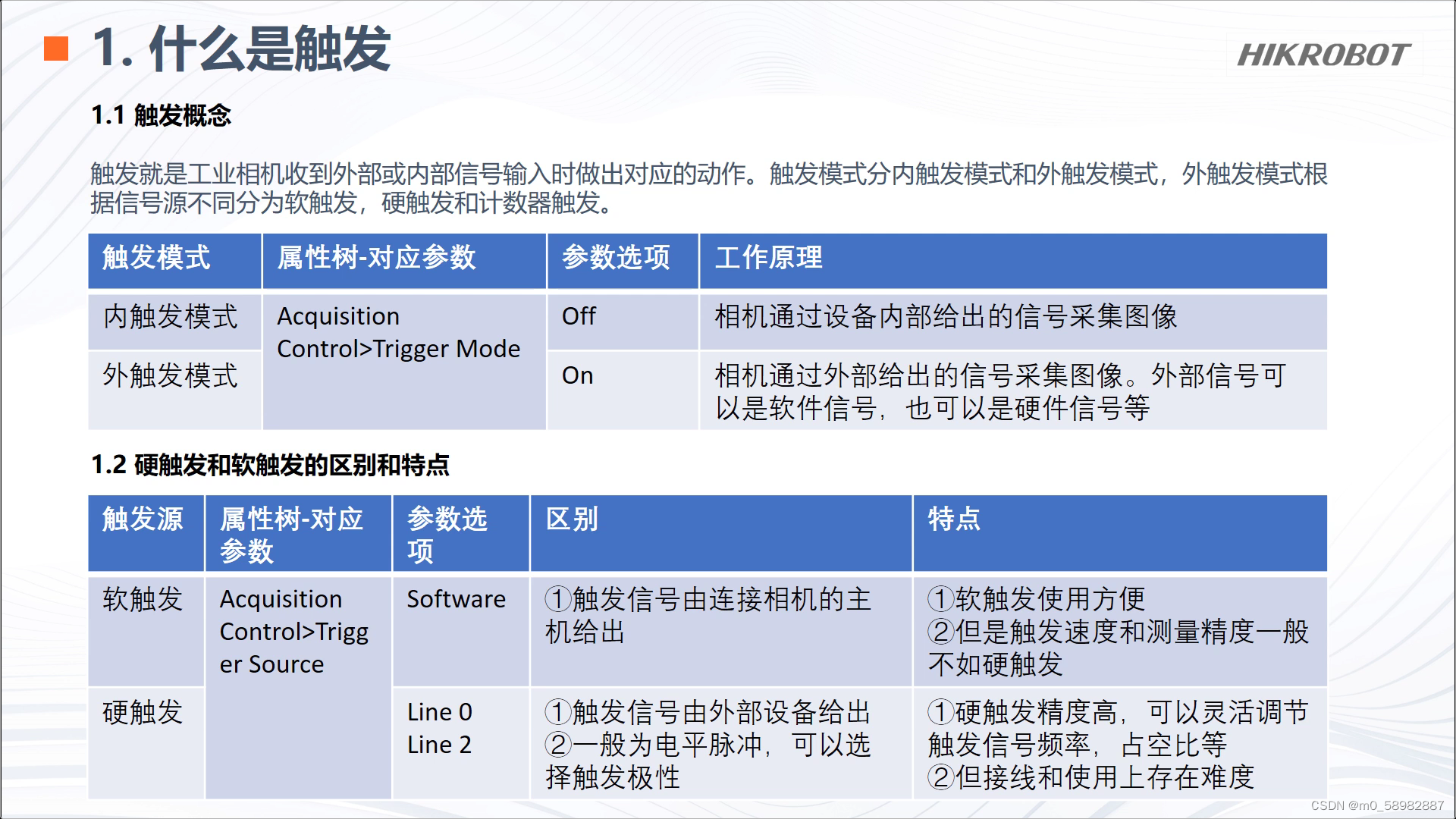
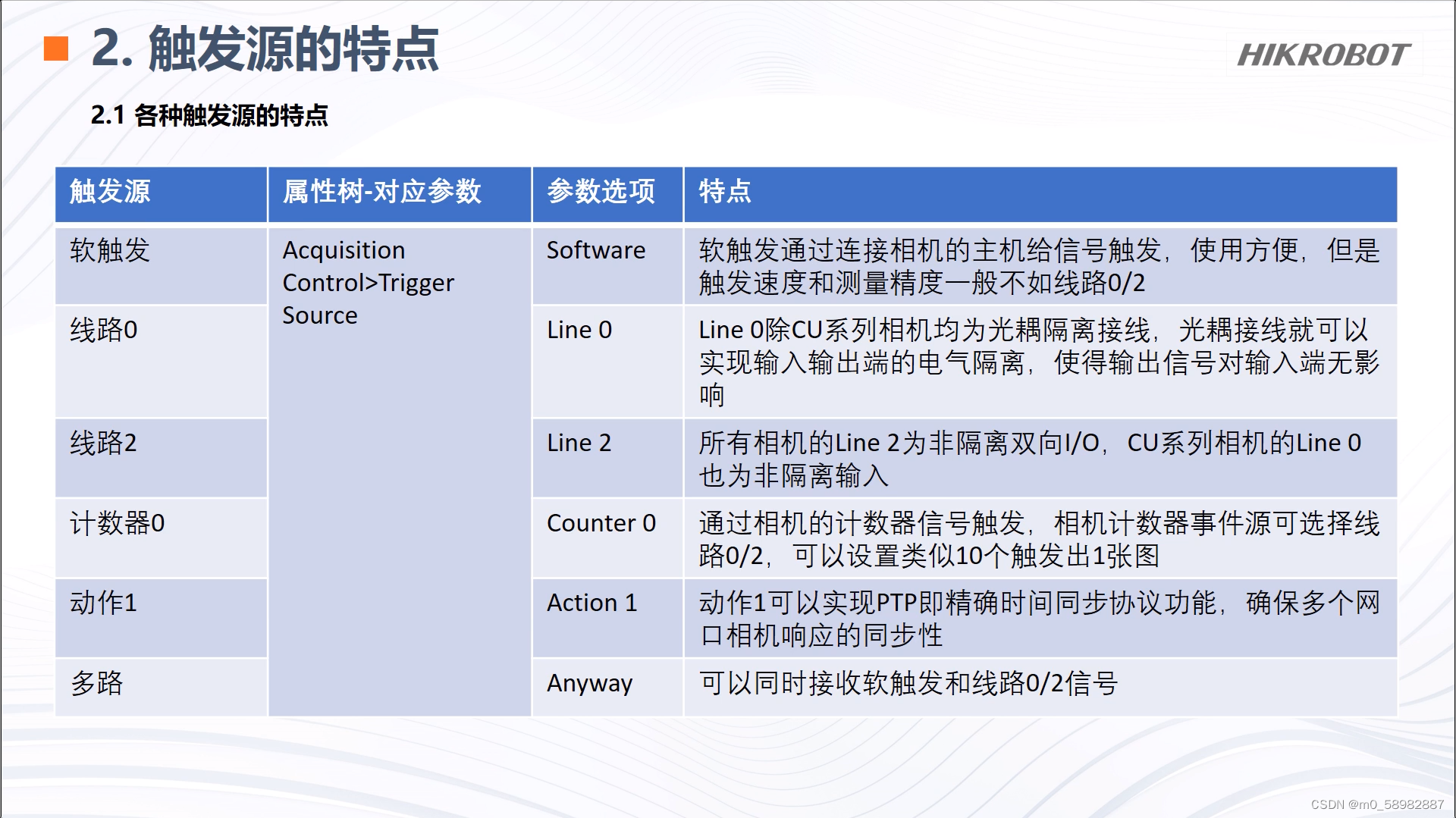
触发
触发时相机收到内部或外部信号,做出相应动作;
外部触发:通过相机的IO接口,来检测外部命令,也叫做硬触发。还可以通过网络设备进行外部触发,比如PLC通过TCP网络进行触发;
例:给相机IO接口施加一个电压,相机做出对应拍照指令;
内部触发:通过对相机进行编程,达到条件后执行对应拍照命令,也叫做软触发;
触发不一定是拍照,可以是其它动作,像拍照这个就称之为一个动作;
还可以通过计数器来触发,通过累计外部或内部触发的次数,达到设定值时执行一个动作。
软触发设置
可设置触发后延时动作

硬触发设置
可设置触发后延时动作
硬触发多了一个功能(极性),
rising edge 上升沿
当信号线由0(没电)变1(有电)时拍照一次,即使几秒后信号线依然为1,也只是执行一次。
falling edge 下降沿
当信号线由1(有电)变0(没电)时拍照一次,即使几秒后信号线依然为0,也只是执行一次。
any edge
任意上升沿或下降沿都可以触发拍照。
level high
有电时拍照,拍照一次。
level low
没电时拍照,拍照一次。

接口解释
双向IO是指该点位可以是输入,也可以是输出。
输入是给相机这根线一个电压,可以执行动作。
输出是相机可以通过这根线来输出一个电压,输出条件需要自己按需设置。
光耦隔离
可以有效避免因接线错误导致烧坏相机,外部线路和内部处理电路没有直接关系,通过一个发光元件来表示有没有信号,内部通过感光元件来监测该发光元件,达到电路隔离,即使外部接上高电压也只是损坏一个发光元件。
触发缓存
如果触发拍照次数高于相机拍照帧率,比如每秒给相机10个信号,但相机每秒只能拍7张,打开触发缓存后可以让相机多拍一张,打开后可以拍8张,只能缓存一个。

接线方式
接线图
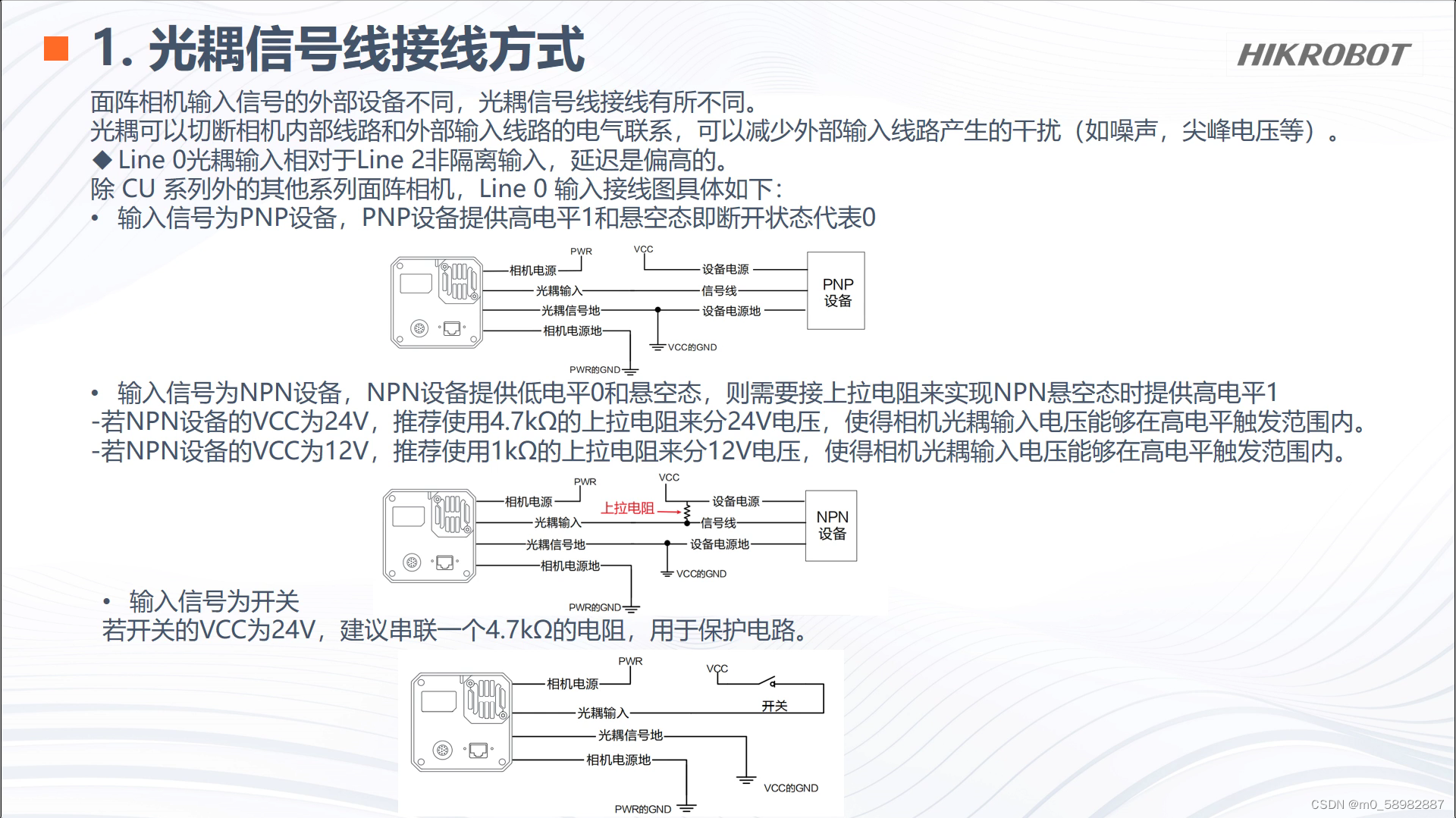
我们可以看出正常的外部IO触发只需要4根线,以PNP接线为例相机电源两根(正极、负极),一组信号(信号的负极、触发信号正极)
如果NPN,把信号正负极颠倒即可。
光耦隔离比非光耦隔离信号传递慢,延迟高。
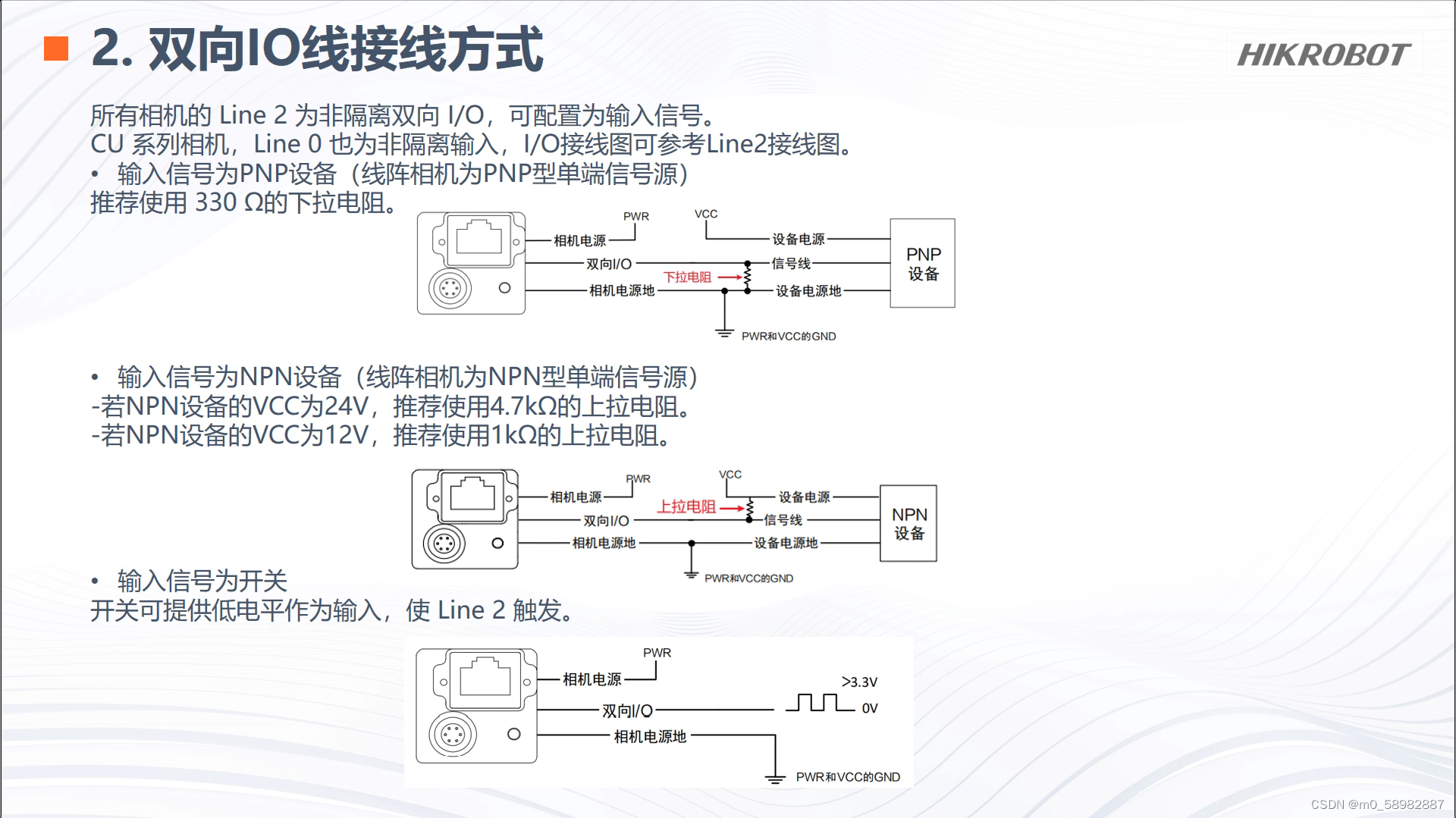
双向IO(可输入、可输出)和正常接线一样,多了输出功能,但输出的是低电平。
在相机配置界面由触发滤波功能,当触发信号保持时长小于触发滤波时长时会忽略该信号,适用于有电压干扰的情况。
在接线有问题时,可以尝试直接接到对应的电源处,即手动触发,查看相机画面数量有没有变化。以排查问题原因。

个人学习笔记
你可以没文凭,但不能没文化!!!




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









