UNet是一种用于图像分割的卷积神经网络结构,它可以用于医学图像分割、自然图像分割等领域。下面我来介绍如何使用PyTorch实现UNet图像分割。
1. 准备数据
首先,你需要准备好图像分割的数据集。这个数据集需要包括原始图像和对应的分割掩码图像。你可以使用任何你熟悉的数据集,比如Kaggle上的数据集,或者自己制作的数据集。
2. 定义UNet模型
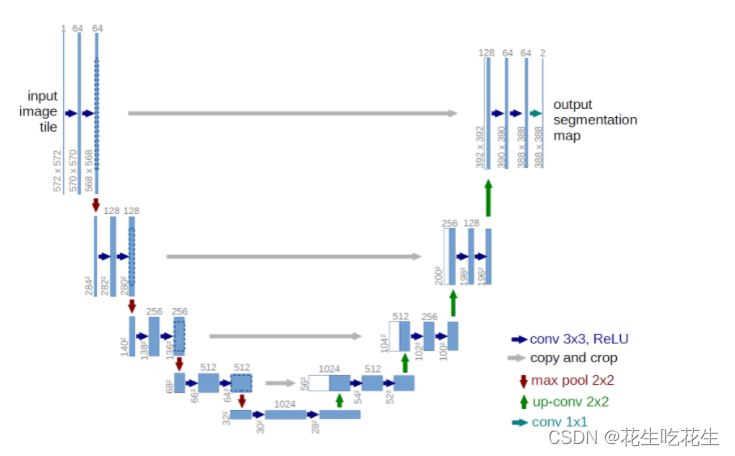
接下来,你需要定义UNet模型。UNet模型由编码器和解码器两部分组成,编码器用于提取图像特征,解码器用于将特征映射回分割掩码图像。下面是一个简单的UNet模型实现:
```python
import torch
import torch.nn as nn
class UNet(nn.Module):
def __init__(self):
super(UNet, self).__init__()
# 编码器
self.conv1 = nn.Conv2d(3, 64, 3, padding=1)
self.bn1 = nn.BatchNorm2d(64)
self.relu1 = nn.ReLU(inplace=True)
self.conv2 = nn.Conv2d(64, 64, 3, padding=1)
self.bn2 = nn.BatchNorm2d(64)
self.relu2 = nn.ReLU(inplace=True)
self.pool1 = nn.MaxPool2d(2, 2)
self.conv3 = nn.Conv2d(64, 128, 3, padding=1)
self.bn3 = nn.BatchNorm2d(128)
self.relu3 = nn.ReLU(inplace=True)
self.conv4 = nn.Conv2d(128, 128, 3, padding=1)
self.bn4 = nn.BatchNorm2d(128)
self.relu4 = nn.ReLU(inplace=True)
self.pool2 = nn.MaxPool2d(2, 2)
self.conv5 = nn.Conv2d(128, 256, 3, padding=1)
self.bn5 = nn.BatchNorm2d(256)
self.relu5 = nn.ReLU(inplace=True)
self.conv6 = nn.Conv2d(256, 256, 3, padding=1)
self.bn6 = nn.BatchNorm2d(256)
self.relu6 = nn.ReLU(inplace=True)
self.pool3 = nn.MaxPool2d(2, 2)
self.conv7 = nn.Conv2d(256, 512, 3, padding=1)
self.bn7 = nn.BatchNorm2d(512)
self.relu7 = nn.ReLU(inplace=True)
self.conv8 = nn.Conv2d(512, 512, 3, padding=1)
self.bn8 = nn.BatchNorm2d(512)
self.relu8 = nn.ReLU(inplace=True)
self.pool4 = nn.MaxPool2d(2, 2)
self.conv9 = nn.Conv2d(512, 1024, 3, padding=1)
self.bn9 = nn.BatchNorm2d(1024)
self.relu9 = nn.ReLU(inplace=True)
self.conv10 = nn.Conv2d(1024, 1024, 3, padding=1)
self.bn10 = nn.BatchNorm2d(1024)
self.relu10 = nn.ReLU(inplace=True)
# 解码器
self.upconv1 = nn.ConvTranspose2d(1024, 512, 2, stride=2)
self.conv11 = nn.Conv2d(1024, 512, 3, padding=1)
self.bn11 = nn.BatchNorm2d(512)
self.relu11 = nn.ReLU(inplace=True)
self.conv12 = nn.Conv2d(512, 512, 3, padding=1)
self.bn12 = nn.BatchNorm2d(512)
self.relu12 = nn.ReLU(inplace=True)
self.upconv2 = nn.ConvTranspose2d(512, 256, 2, stride=2)
self.conv13 = nn.Conv2d(512, 256, 3, padding=1)
self.bn13 = nn.BatchNorm2d(256)
self.relu13 = nn.ReLU(inplace=True)
self.conv14 = nn.Conv2d(256, 256, 3, padding=1)
self.bn14 = nn.BatchNorm2d(256)
self.relu14 = nn.ReLU(inplace=True)
self.upconv3 = nn.ConvTranspose2d(256, 128, 2, stride=2)
self.conv15 = nn.Conv2d(256, 128, 3, padding=1)
self.bn15 = nn.BatchNorm2d(128)
self.relu15 = nn.ReLU(inplace=True)
self.conv16 = nn.Conv2d(128, 128, 3, padding=1)
self.bn16 = nn.BatchNorm2d(128)
self.relu16 = nn.ReLU(inplace=True)
self.upconv4 = nn.ConvTranspose2d(128, 64, 2, stride=2)
self.conv17 = nn.Conv2d(128, 64, 3, padding=1)
self.bn17 = nn.BatchNorm2d(64)
self.relu17 = nn.ReLU(inplace=True)
self.conv18 = nn.Conv2d(64, 64, 3, padding=1)
self.bn18 = nn.BatchNorm2d(64)
self.relu18 = nn.ReLU(inplace=True)
self.conv19 = nn.Conv2d(64, 1, 1)
def forward(self, x):
# 编码器
x1 = self.relu1(self.bn1(self.conv1(x)))
x2 = self.relu2(self.bn2(self.conv2(x1)))
x3 = self.relu3(self.bn3(self.conv3(self.pool1(x2))))
x4 = self.relu4(self.bn4(self.conv4(x3)))
x5 = self.relu5(self.bn5(self.conv5(self.pool2(x4))))
x6 = self.relu6(self.bn6(self.conv6(x5)))
x7 = self.relu7(self.bn7(self.conv7(self.pool3(x6))))
x8 = self.relu8(self.bn8(self.conv8(x7)))
x9 = self.relu9(self.bn9(self.conv9(self.pool4(x8))))
x10 = self.relu10(self.bn10(self.conv10(x9)))
# 解码器
x = self.relu11(self.bn11(self.conv11(torch.cat([x8, self.upconv1(x10)], 1))))
x = self.relu12(self.bn12(self.conv12(x)))
x = self.relu13(self.bn13(self.conv13(torch.cat([x6, self.upconv2(x)], 1))))
x = self.relu14(self.bn14(self.conv14(x)))
x = self.relu15(self.bn15(self.conv15(torch.cat([x4, self.upconv3(x)], 1))))
x = self.relu16(self.bn16(self.conv16(x)))
x = self.relu17(self.bn17(self.conv17(torch.cat([x2, self.upconv4(x)], 1))))
x = self.relu18(self.bn18(self.conv18(x)))
x = self.conv19(x)
return x
```
在这个模型中,UNet有5个下采样层和5个上采样层。每个下采样层由两个卷积层和一个最大池化层组成,每个上采样层由一个转置卷积层和两个卷积层组成。
3. 定义损失函数和优化器
接下来,你需要定义损失函数和优化器。在图像分割任务中,我们通常使用交叉熵损失函数。优化器可以选择Adam、SGD等。
```python
import torch.optim as optim
criterion = nn.BCEWithLogitsLoss()
optimizer = optim.Adam(model.parameters(), lr=0.001)
```
4. 训练模型
最后,你可以开始训练模型了。你需要将数据集分成训练集和验证集,然后使用PyTorch的DataLoader加载数据集,并在每个epoch训练模型。
```python
from torch.utils.data import DataLoader
train_loader = DataLoader(train_dataset, batch_size=4, shuffle=True)
val_loader = DataLoader(val_dataset, batch_size=4, shuffle=True)
for epoch in range(num_epochs):
train_loss = 0
val_loss = 0
# 训练模型
model.train()
for images, masks in train_loader:
optimizer.zero_grad()
outputs = model(images)
loss = criterion(outputs, masks)
loss.backward()
optimizer.step()
train_loss += loss.item()
# 验证模型
model.eval()
with torch.no_grad():
for images, masks in val_loader:
outputs = model(images)
loss = criterion(outputs, masks)
val_loss += loss.item()
train_loss /= len(train_loader)
val_loss /= len(val_loader)
print('Epoch: {}, Train Loss: {}, Val Loss: {}'.format(epoch+1, train_loss, val_loss))
```
在训练过程中,你可以在每个epoch后计算训练集和验证集的损失,并输出训练结果。训练完成后,你可以保存模型并在测试集上进行测试。
这就是使用PyTorch实现UNet图像分割的基本流程。当然,你可以根据自己的需求调整模型结构、损失函数和优化器等。








 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 7762
7762











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









