







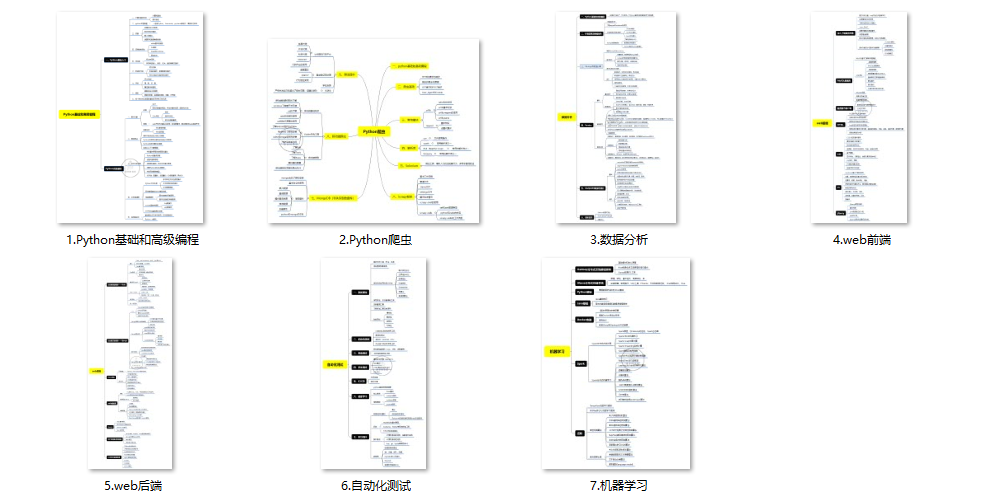
(1)Python所有方向的学习路线(新版)
这是我花了几天的时间去把Python所有方向的技术点做的整理,形成各个领域的知识点汇总,它的用处就在于,你可以按照上面的知识点去找对应的学习资源,保证自己学得较为全面。
最近我才对这些路线做了一下新的更新,知识体系更全面了。
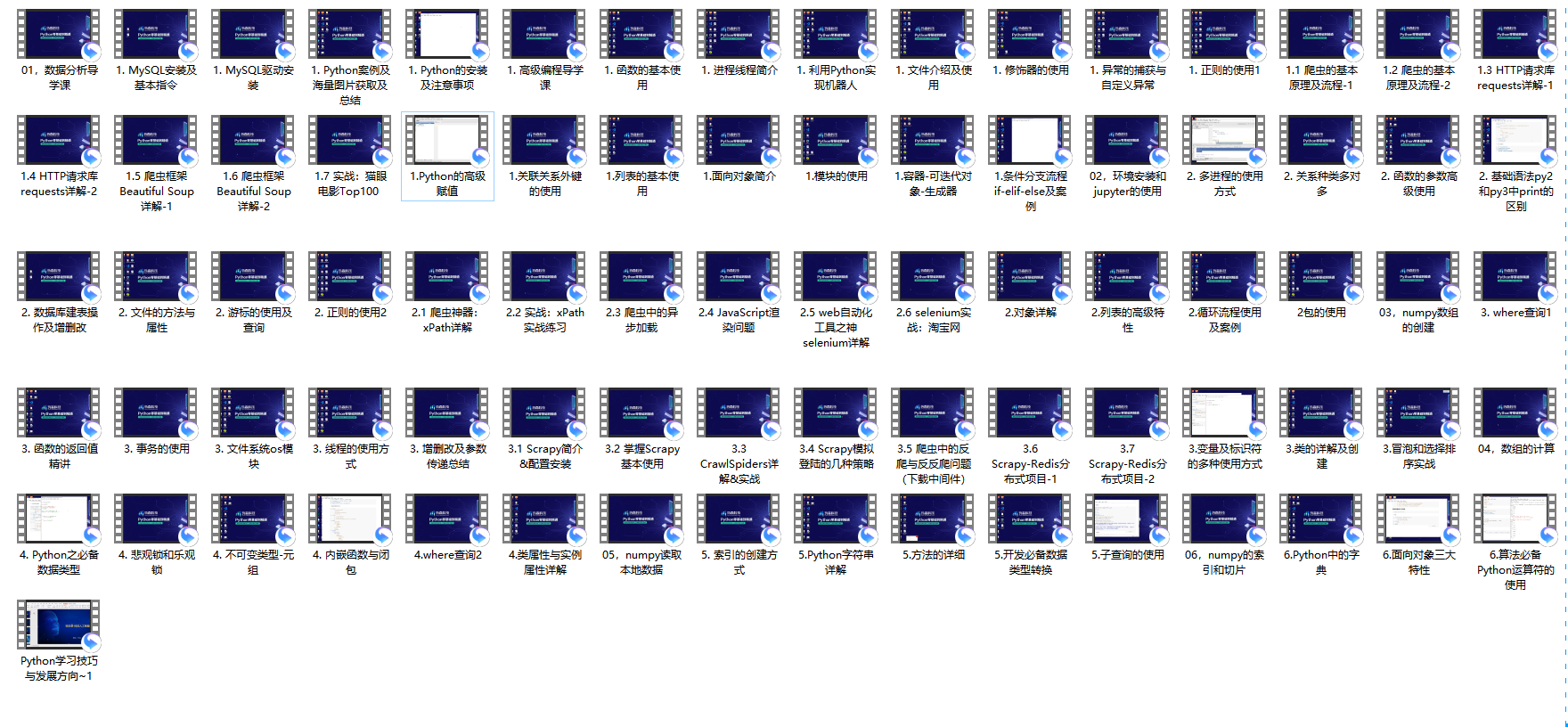
(2)Python学习视频
包含了Python入门、爬虫、数据分析和web开发的学习视频,总共100多个,虽然没有那么全面,但是对于入门来说是没问题的,学完这些之后,你可以按照我上面的学习路线去网上找其他的知识资源进行进阶。
(3)100多个练手项目
我们在看视频学习的时候,不能光动眼动脑不动手,比较科学的学习方法是在理解之后运用它们,这时候练手项目就很适合了,只是里面的项目比较多,水平也是参差不齐,大家可以挑自己能做的项目去练练。

网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
- win32gui、win32api依赖库
- 支持Python的IDE [可选,如果你能忍受用文本编辑器写程序也可以]
- 扫雷软件
· Minesweeper Arbiter 下载地址(必须使用MS-Arbiter来进行扫雷!)
好啦,那么我们的准备工作已经全部完成了!让我们开始吧~
实现思路
在去做一件事情之前最重要的是什么?是将要做的这件事情在心中搭建一个步骤框架。只有这样,才能保证在去做这件事的过程中,尽可能的做到深思熟虑,使得最终有个好的结果。我们写程序也要尽可能做到在正式开始开发之前,在心中有个大致的思路。
对于本项目而言,大致的开发过程是这样的:
- 完成窗体内容截取部分
- 完成雷块分割部分
- 完成雷块类型识别部分
- 完成扫雷算法
好啦,既然我们有了个思路,那就撸起袖子大力干!
- 01 窗体截取
其实对于本项目而言,窗体截取是一个逻辑上简单,实现起来却相当麻烦的部分,而且还是必不可少的部分。我们通过Spy++得到了以下两点信息:
class_name = "TMain"
title_name = "Minesweeper Arbiter "
ms_arbiter.exe的主窗体类别为"TMain"
ms_arbiter.exe的主窗体名称为"Minesweeper Arbiter "
注意到了么?主窗体的名称后面有个空格。正是这个空格让笔者困扰了一会儿,只有加上这个空格,win32gui才能够正常的获取到窗体的句柄。
本项目采用了win32gui来获取窗体的位置信息,具体代码如下:
hwnd = win32gui.FindWindow(class_name, title_name)
if hwnd:
left, top, right, bottom = win32gui.GetWindowRect(hwnd)
通过以上代码,我们得到了窗体相对于整块屏幕的位置。之后我们需要通过PIL来进行扫雷界面的棋盘截取。
我们需要先导入PIL库
from PIL import ImageGrab
然后进行具体的操作。
left += 15
top += 101
right -= 15
bottom -= 43
rect = (left, top, right, bottom)
img = ImageGrab.grab().crop(rect)
聪明的你肯定一眼就发现了那些奇奇怪怪的Magic Numbers,没错,这的确是Magic Numbers,是我们通过一点点细微调节得到的整个棋盘相对于窗体的位置。
注意:这些数据仅在Windows10下测试通过,如果在别的Windows系统下,不保证相对位置的正确性,因为老版本的系统可能有不同宽度的窗体边框。
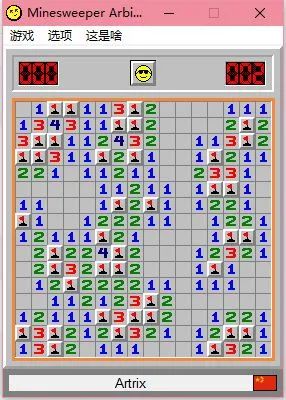
橙色的区域是我们所需要的
好啦,棋盘的图像我们有了,下一步就是对各个雷块进行图像分割了~
- 02 雷块分割

在进行雷块分割之前,我们事先需要了解雷块的尺寸以及它的边框大小。经过笔者的测量,在ms_arbiter下,每一个雷块的尺寸为16px*16px。
知道了雷块的尺寸,我们就可以进行每一个雷块的裁剪了。首先我们需要知道在横和竖两个方向上雷块的数量。
block_width, block_height = 16, 16
blocks_x = int((right - left) / block_width)
blocks_y = int((bottom - top) / block_height)
之后,我们建立一个二维数组用于存储每一个雷块的图像,并且进行图像分割,保存在之前建立的数组中。
def crop_block(hole_img, x, y):
x1, y1 = x * block_width, y * block_height
x2, y2 = x1 + block_width, y1 + block_height
return hole_img.crop((x1, y1, x2, y2))
blocks_img = [[0 for i in range(blocks_y)] for i in range(blocks_x)]
for y in range(blocks_y):
for x in range(blocks_x):
blocks_img[x][y] = crop_block(img, x, y)
将整个图像获取、分割的部分封装成一个库,随时调用就OK啦~在笔者的实现中,我们将这一部分封装成了imageProcess.py,其中函数get_frame()用于完成上述的图像获取、分割过程。
- 03 雷块识别
这一部分可能是整个项目里除了扫雷算法本身之外最重要的部分了。笔者在进行雷块检测的时候采用了比较简单的特征,高效并且可以满足要求。
def analyze_block(self, block, location):
block = imageProcess.pil_to_cv(block)
block_color = block[8, 8]
x, y = location[0], location[1]
# -1:Not opened
# -2:Opened but blank
# -3:Un initialized
# Opened
if self.equal(block_color, self.rgb_to_bgr((192, 192, 192))):
if not self.equal(block[8, 1], self.rgb_to_bgr((255, 255, 255))):
self.blocks_num[x][y] = -2
self.is_started = True
else:
self.blocks_num[x][y] = -1
elif self.equal(block_color, self.rgb_to_bgr((0, 0, 255))):
self.blocks_num[x][y] = 1
elif self.equal(block_color, self.rgb_to_bgr((0, 128, 0))):
self.blocks_num[x][y] = 2
elif self.equal(block_color, self.rgb_to_bgr((255, 0, 0))):
self.blocks_num[x][y] = 3
elif self.equal(block_color, self.rgb_to_bgr((0, 0, 128))):
self.blocks_num[x][y] = 4
elif self.equal(block_color, self.rgb_to_bgr((128, 0, 0))):
self.blocks_num[x][y] = 5
elif self.equal(block_color, self.rgb_to_bgr((0, 128, 128))):
self.blocks_num[x][y] = 6
elif self.equal(block_color, self.rgb_to_bgr((0, 0, 0))):
if self.equal(block[6, 6], self.rgb_to_bgr((255, 255, 255))):
# Is mine
self.blocks_num[x][y] = 9
elif self.equal(block[5, 8], self.rgb_to_bgr((255, 0, 0))):
# Is flag
self.blocks_num[x][y] = 0
else:
self.blocks_num[x][y] = 7
elif self.equal(block_color, self.rgb_to_bgr((128, 128, 128))):
self.blocks_num[x][y] = 8
else:
self.blocks_num[x][y] = -3
self.is_mine_form = False
if self.blocks_num[x][y] == -3 or not self.blocks_num[x][y] == -1:
self.is_new_start = False
可以看到,我们采用了读取每个雷块的中心点像素的方式来判断雷块的类别,并且针对插旗、未点开、已点开但是空白等情况进行了进一步判断。具体色值是笔者直接取色得到的,并且屏幕截图的色彩也没有经过压缩,所以通过中心像素结合其他特征点来判断类别已经足够了,并且做到了高效率。
在本项目中,我们实现的时候采用了如下标注方式:
- 1-8:表示数字1到8
- 9:表示是地雷
- 0:表示插旗
- -1:表示未打开
- -2:表示打开但是空白
- -3:表示不是扫雷游戏中的任何方块类型
通过这种简单快速又有效的方式,我们成功实现了高效率的图像识别。
- 04 扫雷算法实现
这可能是本篇文章最激动人心的部分了。在这里我们需要先说明一下具体的扫雷算法思路:
- 遍历每一个已经有数字的雷块,判断在它周围的九宫格内未被打开的雷块数量是否和本身数字相同,如果相同则表明周围九宫格内全部都是地雷,进行标记。
- 再次遍历每一个有数字的雷块,取九宫格范围内所有未被打开的雷块,去除已经被上一次遍历标记为地雷的雷块,记录并且点开。
- 如果以上方式无法继续进行,那么说明遇到了死局,选择在当前所有未打开的雷块中随机点击。(当然这个方法不是最优的,有更加优秀的解决方案,但是实现相对麻烦)
基本的扫雷流程就是这样,那么让我们来亲手实现它吧~
首先我们需要一个能够找出一个雷块的九宫格范围的所有方块位置的方法。因为扫雷游戏的特殊性,在棋盘的四边是没有九宫格的边缘部分的,所以我们需要筛选来排除掉可能超过边界的访问。
def analyze_block(self, block, location):
block = imageProcess.pil_to_cv(block)
block_color = block[8, 8]
x, y = location[0], location[1]
# -1:Not opened
# -2:Opened but blank
# -3:Un initialized
# Opened
if self.equal(block_color, self.rgb_to_bgr((192, 192, 192))):
if not self.equal(block[8, 1], self.rgb_to_bgr((255, 255, 255))):
self.blocks_num[x][y] = -2
self.is_started = True
else:
self.blocks_num[x][y] = -1
elif self.equal(block_color, self.rgb_to_bgr((0, 0, 255))):
self.blocks_num[x][y] = 1
elif self.equal(block_color, self.rgb_to_bgr((0, 128, 0))):
self.blocks_num[x][y] = 2
elif self.equal(block_color, self.rgb_to_bgr((255, 0, 0))):
self.blocks_num[x][y] = 3
elif self.equal(block_color, self.rgb_to_bgr((0, 0, 128))):
self.blocks_num[x][y] = 4
elif self.equal(block_color, self.rgb_to_bgr((128, 0, 0))):
self.blocks_num[x][y] = 5
elif self.equal(block_color, self.rgb_to_bgr((0, 128, 128))):
self.blocks_num[x][y] = 6
如果你也是看准了Python,想自学Python,在这里为大家准备了丰厚的免费**学习**大礼包,带大家一起学习,给大家剖析Python兼职、就业行情前景的这些事儿。
### 一、Python所有方向的学习路线
Python所有方向路线就是把Python常用的技术点做整理,形成各个领域的知识点汇总,它的用处就在于,你可以按照上面的知识点去找对应的学习资源,保证自己学得较为全面。

### 二、学习软件
工欲善其必先利其器。学习Python常用的开发软件都在这里了,给大家节省了很多时间。

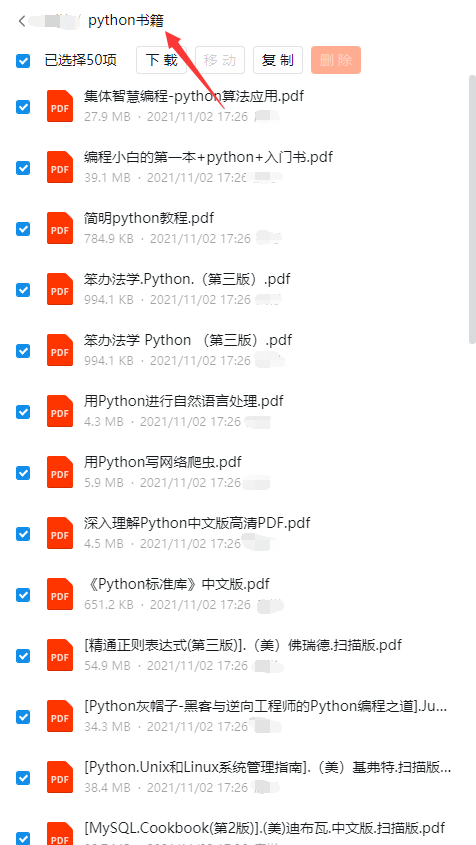
### 三、全套PDF电子书
书籍的好处就在于权威和体系健全,刚开始学习的时候你可以只看视频或者听某个人讲课,但等你学完之后,你觉得你掌握了,这时候建议还是得去看一下书籍,看权威技术书籍也是每个程序员必经之路。
### 四、入门学习视频
我们在看视频学习的时候,不能光动眼动脑不动手,比较科学的学习方法是在理解之后运用它们,这时候练手项目就很适合了。
### 四、实战案例
光学理论是没用的,要学会跟着一起敲,要动手实操,才能将自己的所学运用到实际当中去,这时候可以搞点实战案例来学习。

### 五、面试资料
我们学习Python必然是为了找到高薪的工作,下面这些面试题是来自阿里、腾讯、字节等一线互联网大厂最新的面试资料,并且有阿里大佬给出了权威的解答,刷完这一套面试资料相信大家都能找到满意的工作。

成为一个Python程序员专家或许需要花费数年时间,但是打下坚实的基础只要几周就可以,如果你按照我提供的学习路线以及资料有意识地去实践,你就有很大可能成功!
最后祝你好运!!!
**网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。**
**[需要这份系统化学习资料的朋友,可以戳这里获取](https://bbs.csdn.net/topics/618317507)**
**一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!**















 1042
1042

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









