






目录
一:什么是线段树?
线段树的概念: 线段树是算法竞赛中常用的用来维护 区间信息 的数据结构。
线段树可以在 O ( l o g N ) O(logN) O(logN) 的时间复杂度内实现单点修改、区间修改、区间查询(区间求和,求区间最大值,求区间最小值)等操作。
二:线段树的基本结构及空间复杂度
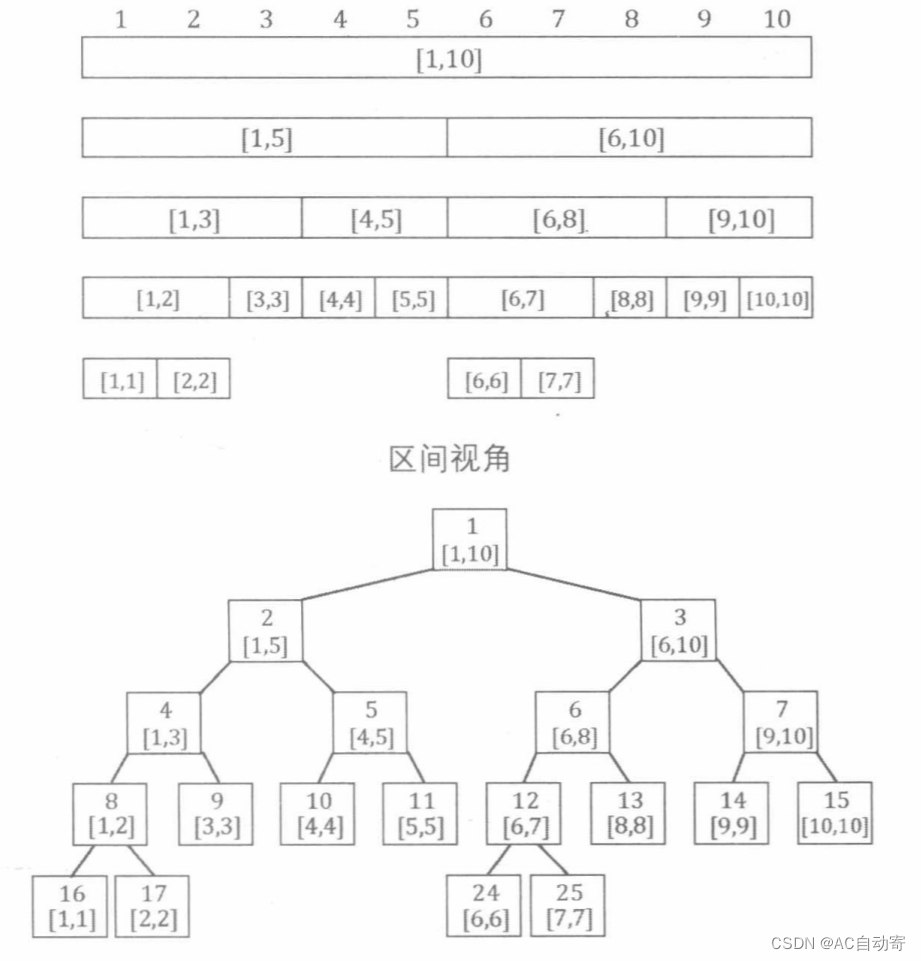
线段树的结构(文字解释):
- 线段树将每个长度不为 1 1 1 的区间划分成左右两个区间递归求解,把整个线段划分为一个树形结构,
- 线段树的操作通过合并左右两区间信息来求得该区间的信息。这种数据结构可以方便的进行大部分的区间操作。
- 线段树为满二叉树,用一维数组存整颗树
线段树的结构(下图所示):
线段树的空间复杂度:
对于线段树最少要开4倍空间的解释:
- 若最后一层节点都满,则该层为最后一层,有 N N N个节点,则其上面节点数为 N / 2 + N / 4 + N / 8 + . . . . . . + 1 N/2 + N/4 + N/8 + ...... + 1 N/2+N/4+N/8+......+1,此时所有节点数为 N + N / 2 + N / 4 + N / 8 + . . . . . . + 1 N + N/2 + N/4 + N/8 + ...... + 1 N+N/2+N/4+N/8+......+1 和为 2 N − 1 2N - 1 2N−1
- 若最后一层不满,即、上两图所示的情况,则倒数第二层为 N 个节点 N个节点 N个节点,除倒数第一层以外的所有层节点和为 2 N − 1 2N - 1 2N−1,最后一层为 2 N 2N 2N 个节点,即、总节点为 4 N − 1 4N - 1 4N−1 ,所以保险起见,线段树一律开 4 N 4N 4N 空间
三:线段树的常用操作
线段树的建树
线段树的节点关系:
- 若该节点为
x - 其父节点为
x / 2等效于x >> 1 - 左儿子为
x * 2等效于x << 1 - 右儿子为
x * 2 + 1等效于x << 1 | 1
常用函数:
- p u s h u p ( ) pushup() pushup()
- p u s h d o w n ( ) pushdown() pushdown()
- b u i l d ( ) build() build()
- m o d i f y ( ) modify() modify()
- q u e r y ( ) query() query()
1.pushup() 更新操作(子->父)
在介绍 b u i l d ( ) build() build() 函数之前先介绍 p u s h u p ( ) pushup() pushup() 函数;
p u s h u p ( ) pushup() pushup()函数含义为:由子节点信息更新父节点信息
例子:单点修改(求最大值,最小值等 …)
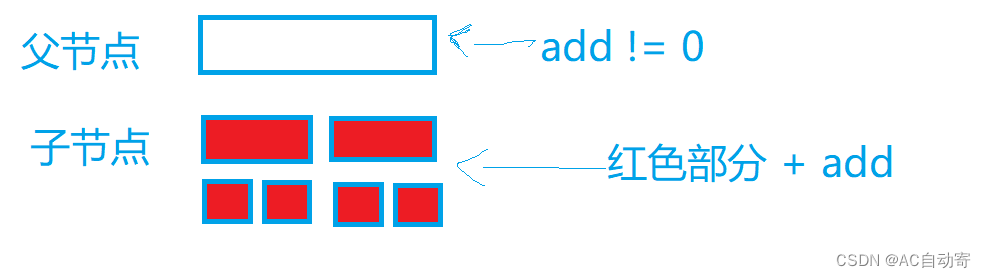
2.pushdown() 更新操作(父->子)
**俗称:**懒标记(支持区间修改)
以区间加为例:
含义: 给当前区间的所有儿子加上 add(懒标记)
如图:
3.build() 建树操作
建立线段树:
- 从根节点开始,一层层递归到叶子节点
- 每递归一层调用一次 p u s h u p ( ) ( 由子节点更新父节点 ) pushup()(由子节点更新父节点) pushup()(由子节点更新父节点)
一般模板为:
函数参数为:当前区间的编号u 当前区间的左端点l 当前区间的右端点r
void build(int u, int l, int r)
{
tr[u] = {l, r};
if(l == r) return;
int mid = l + r >> 1;
build(u << 1, l, mid), build(u << 1 | 1, mid + 1, r);
pushup(u);
}
3.modify() 修改操作
- 单点修改操作:一直递归至叶子节点,在返回时 p u s h u p ( ) pushup() pushup() 即可
- 区间修改操作:和 q u e r y ( ) query() query()函数 类似,每次分裂前 p u s h d o w n ( ) pushdown() pushdown() ,返回时 p u s h u p ( ) pushup() pushup()
4.query() 查询操作
以查询区间最大值为例:
其中
[
L
,
R
]
[L, R]
[L,R] 为 要查询的区间,
[
T
L
,
T
R
]
[T_L, T_R]
[TL,TR] 为当前区间的范围
则有如下几种情况:
- [ L , R ] ⊃ [ T L , T R ] [L, R] \supset [T_L, T_R] [L,R]⊃[TL,TR]
- [ L , R ] ∩ [ T L , T R ] ≠ ∅ [L, R] \cap [T_L, T_R] \neq \varnothing [L,R]∩[TL,TR]=∅
- [ L , R ] ∩ [ T L , T R ] = ∅ [L, R] \cap [T_L, T_R]= \varnothing [L,R]∩[TL,TR]=∅
具体操作:
1.
[
L
,
R
]
⊃
[
T
L
,
T
R
]
[L, R] \supset [T_L, T_R]
[L,R]⊃[TL,TR]
如图:

即、树中区间在我们要查询区间的内部:直接返回最大值(树中保存的信息即可)
2.
[
L
,
R
]
∩
[
T
L
,
T
R
]
≠
∅
[L, R] \cap [T_L, T_R] \neq \varnothing
[L,R]∩[TL,TR]=∅
如图:
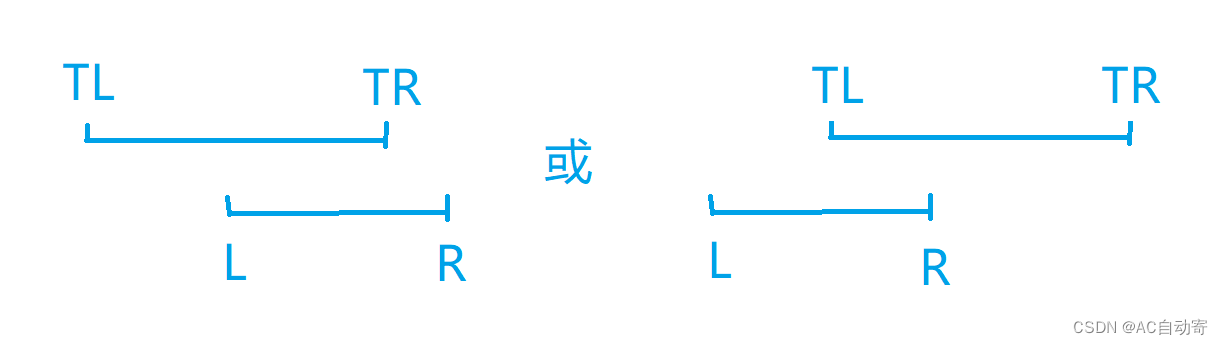
包含如下几种情况:
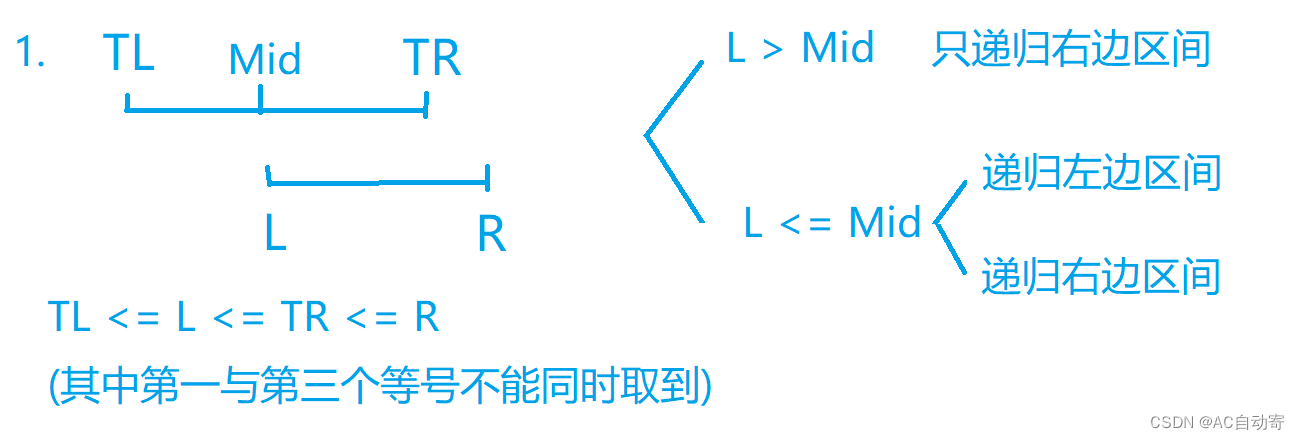
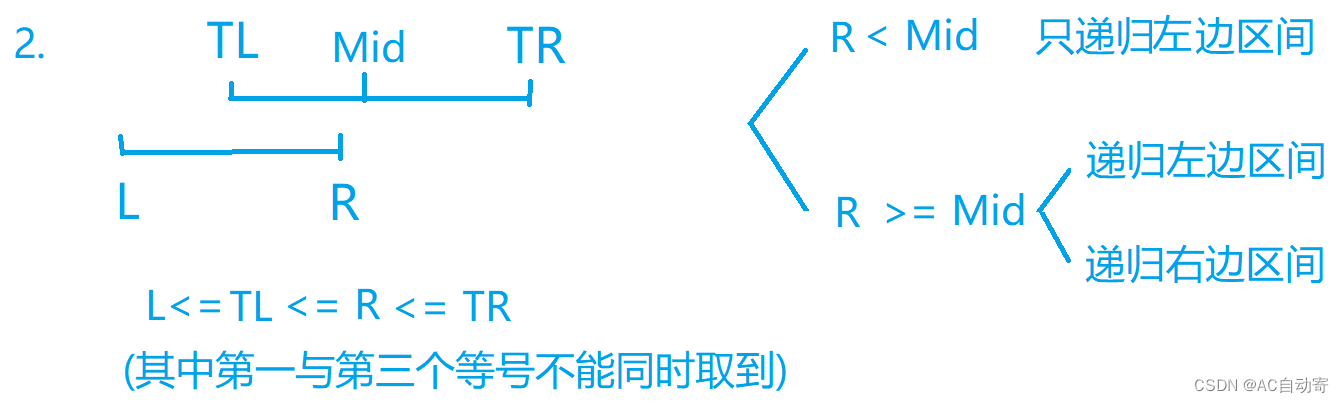
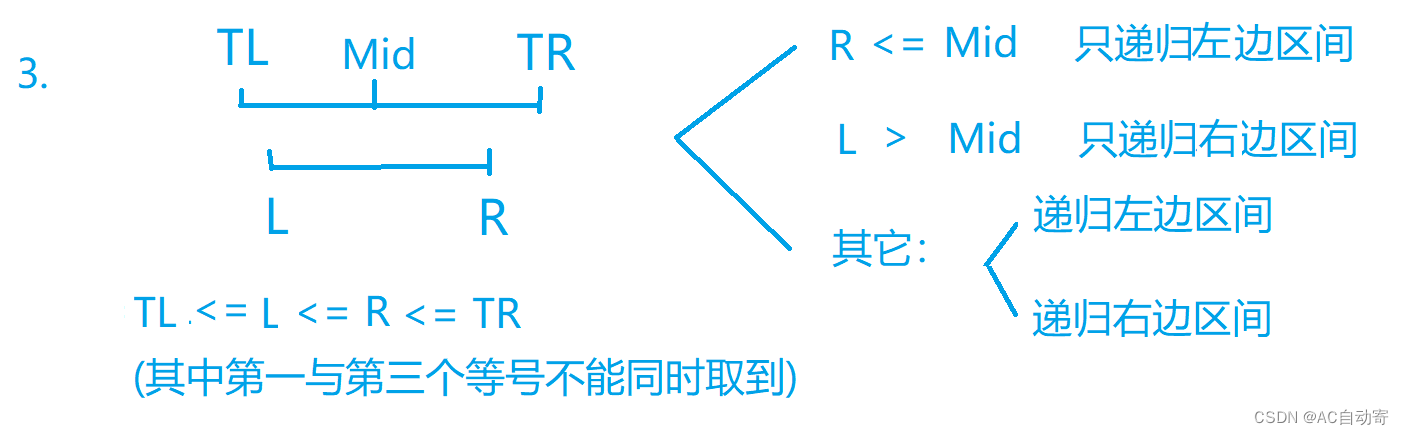
总结
-
查询区间于树中区间有交集,则递归交集的部分:左边有交集递归左边,右边有交集递归右边
-
一般只有两条链递归至叶子节点,时间复杂度为 O ( l o g N ) O(logN) O(logN),但 l o g N logN logN 的常数较大(比树状数组,st表等都大)
3.
[
L
,
R
]
∩
[
T
L
,
T
R
]
=
∅
[L, R] \cap [T_L, T_R]= \varnothing
[L,R]∩[TL,TR]=∅
不存在此种情况!!!
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











