







|
|
|
|
|
|
目录
机器人导论实验-差速驱动机器人的运动学与控制
1 实验目的
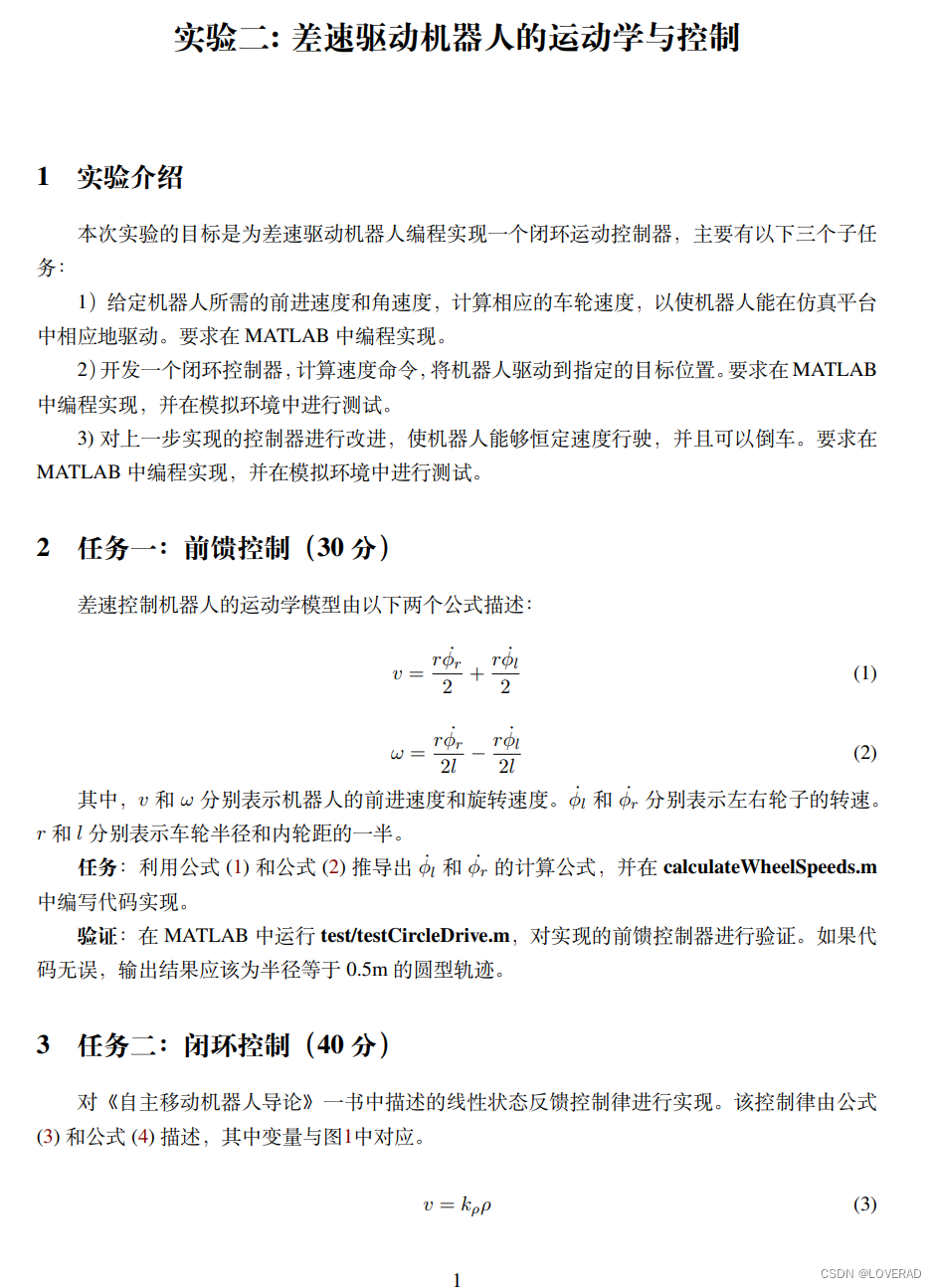
本次实验的目标是为差速驱动机器人编程实现一个闭环运动控制器,主要有以下三个子任务:
1)给定机器人所需的前进速度和角速度,计算相应的车轮速度,以使机器人能在仿真平台中相应地驱动。要求在 MATLAB 中编程实现。
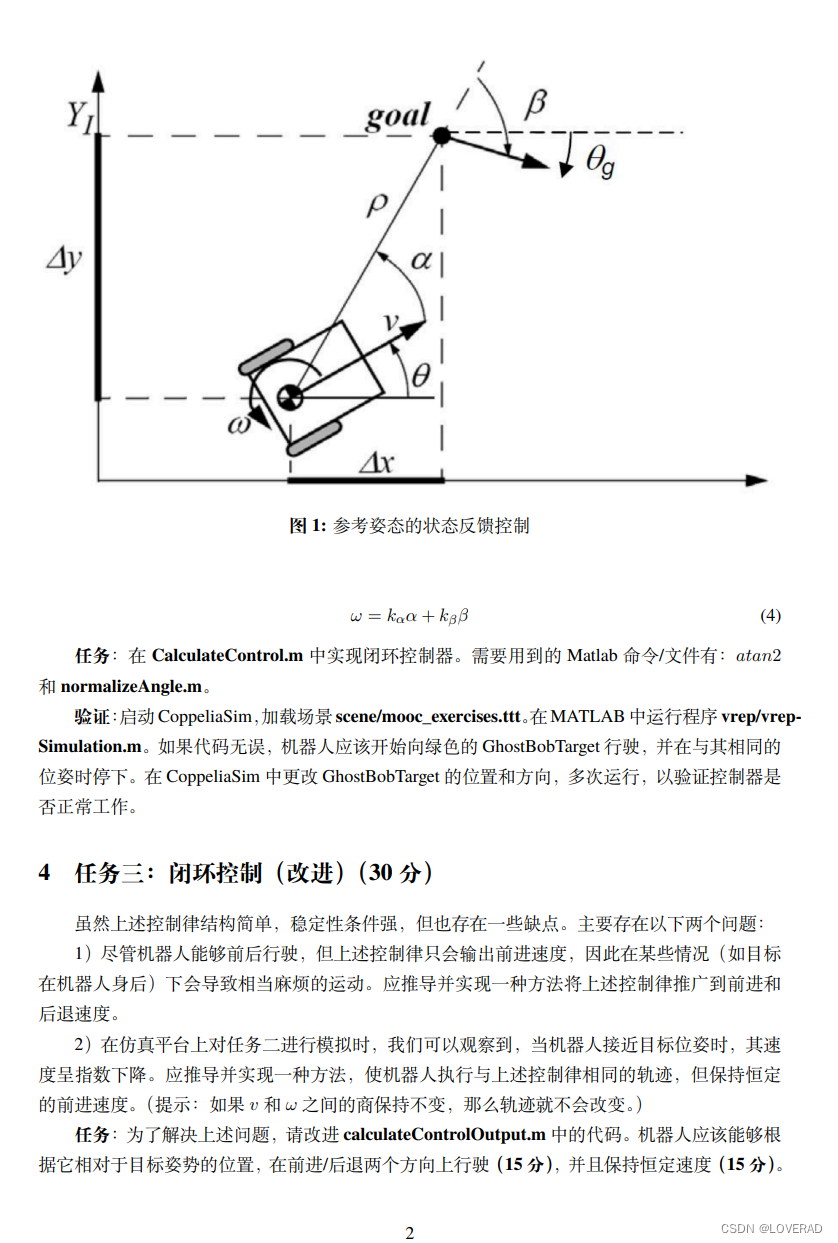
2)开发一个闭环控制器,计算速度命令,将机器人驱动到指定的目标位置。要求在MATLAB 中编程实现,并在模拟环境中进行测试。
3)对上一步实现的控制器进行改进,使机器人能够恒定速度行驶,并且可以倒车。要求在 MATLAB 中编程实现,并在模拟环境中进行测试。
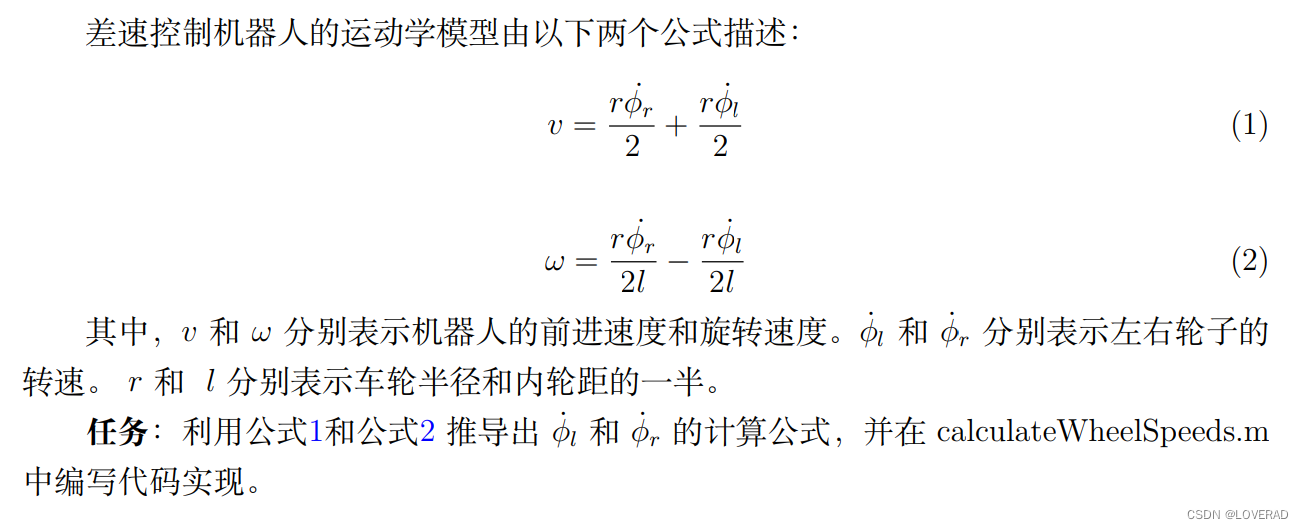
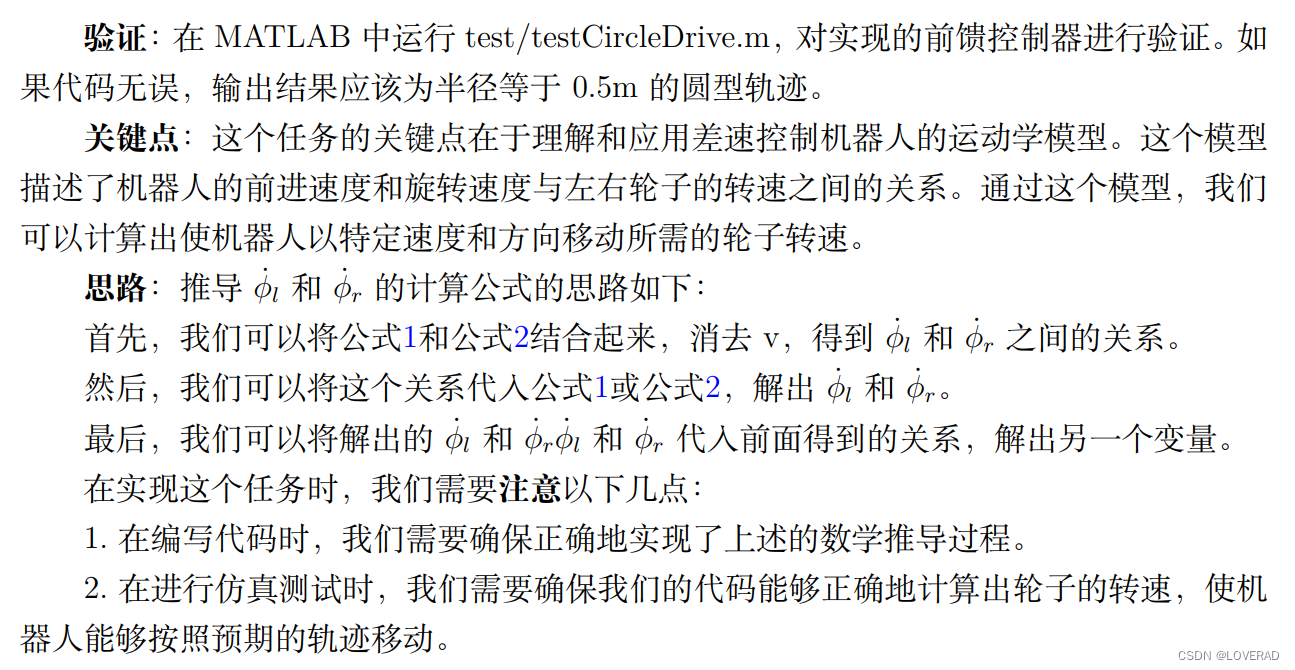
2 任务一:前馈控制
2.1 内容分析
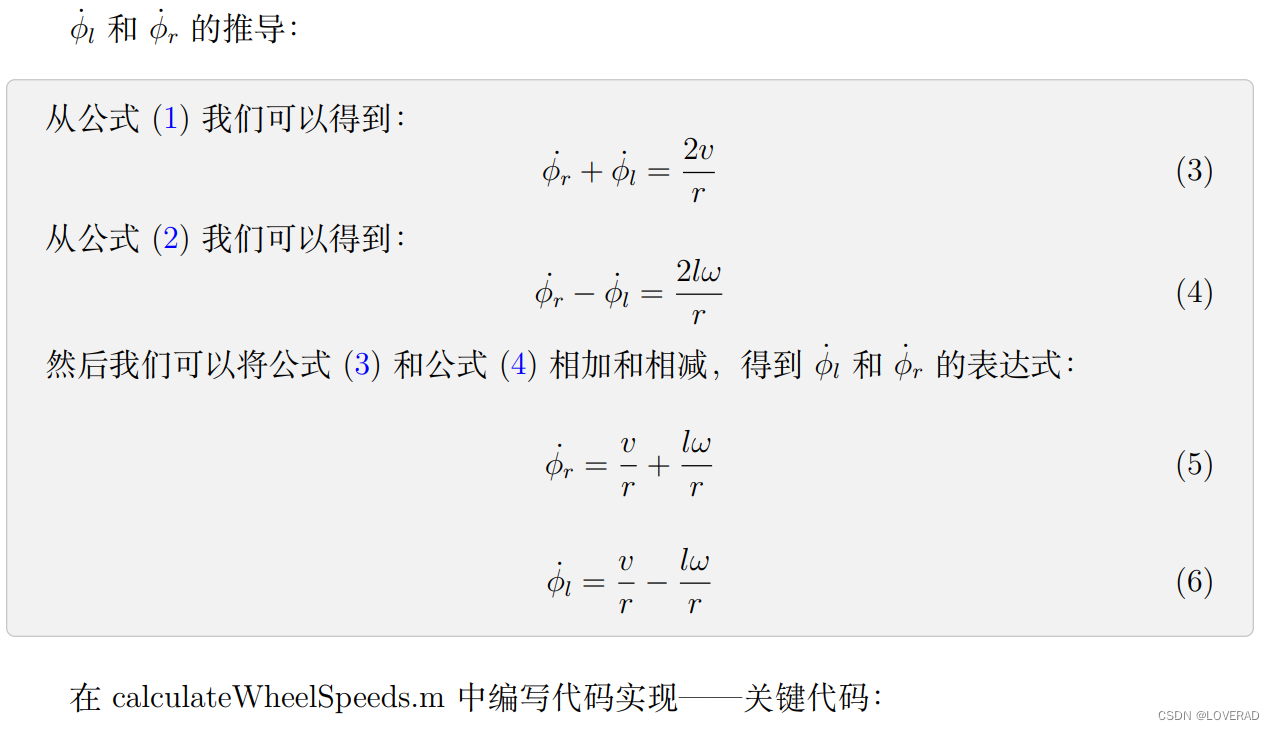
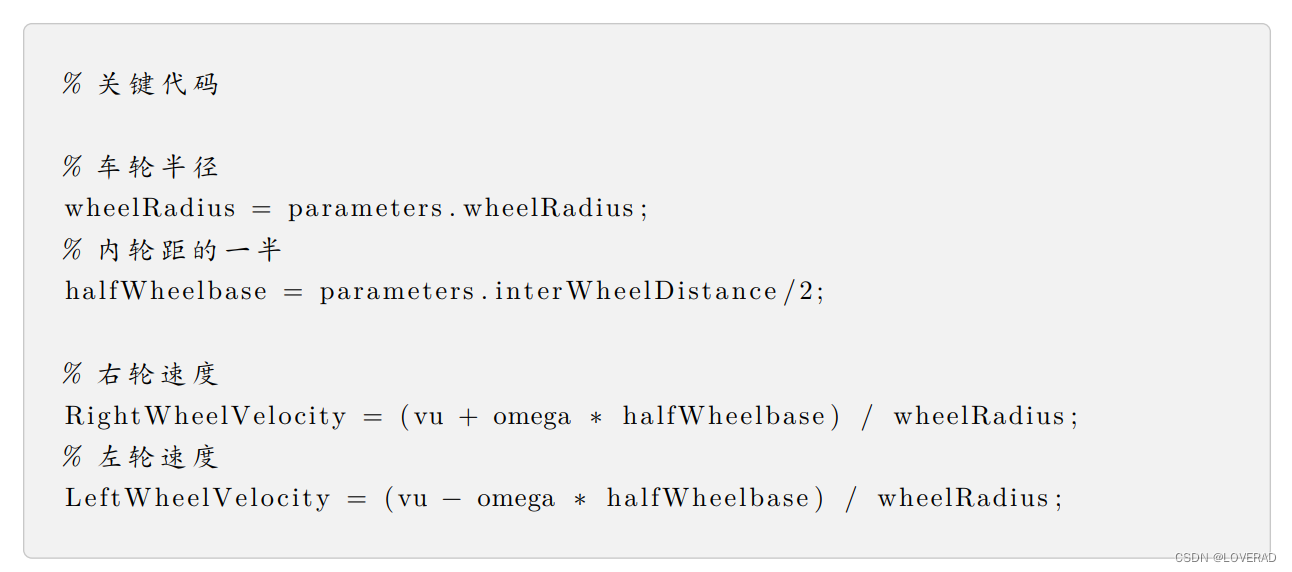
2.2 过程分析
5 遇到的问题和心得体会
完整实验报告下方点击下载:

















 884
884

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











