目录
机器人导论实验-机器人定位中的直线拟合与提取
1 实验目的
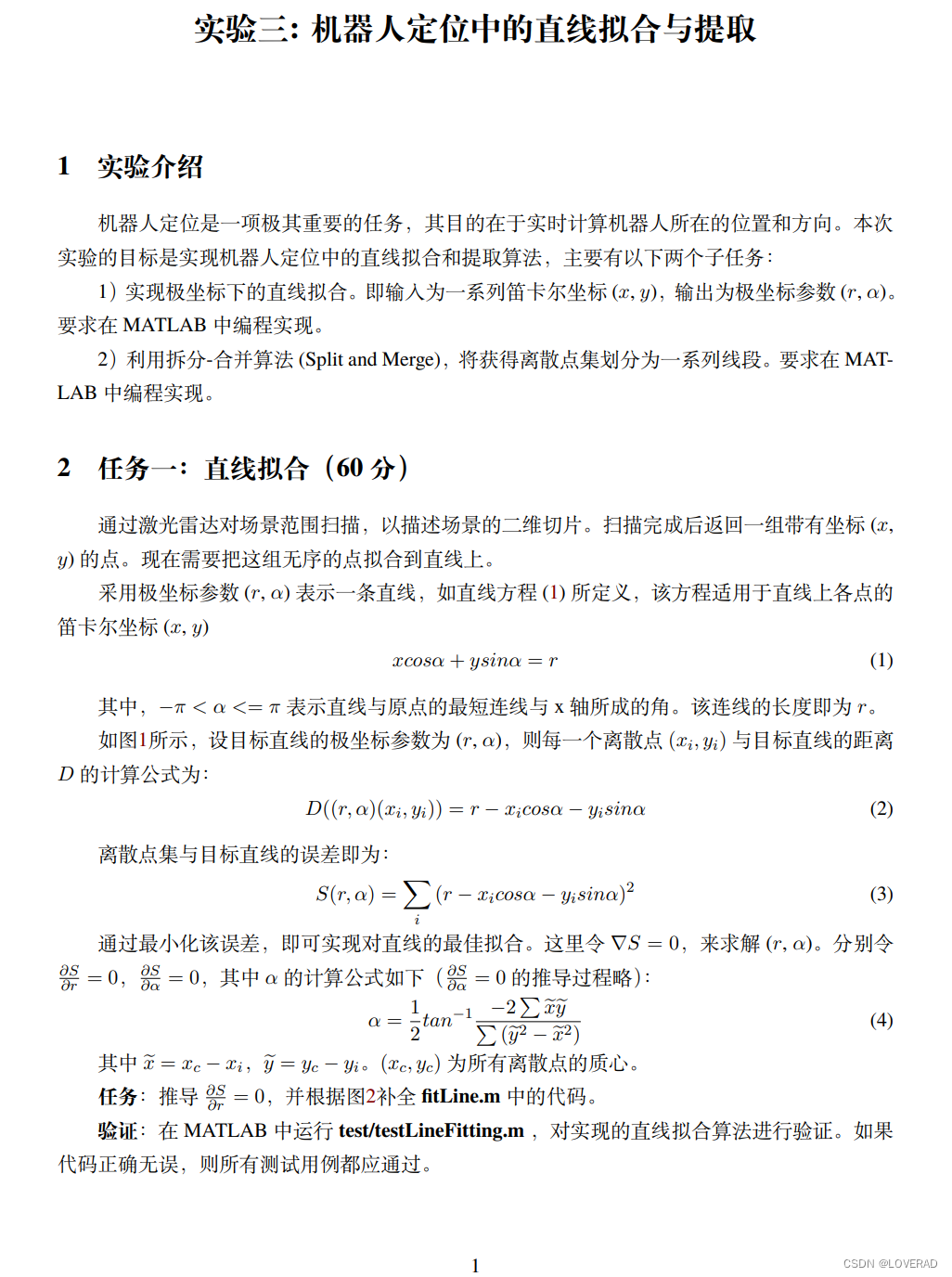
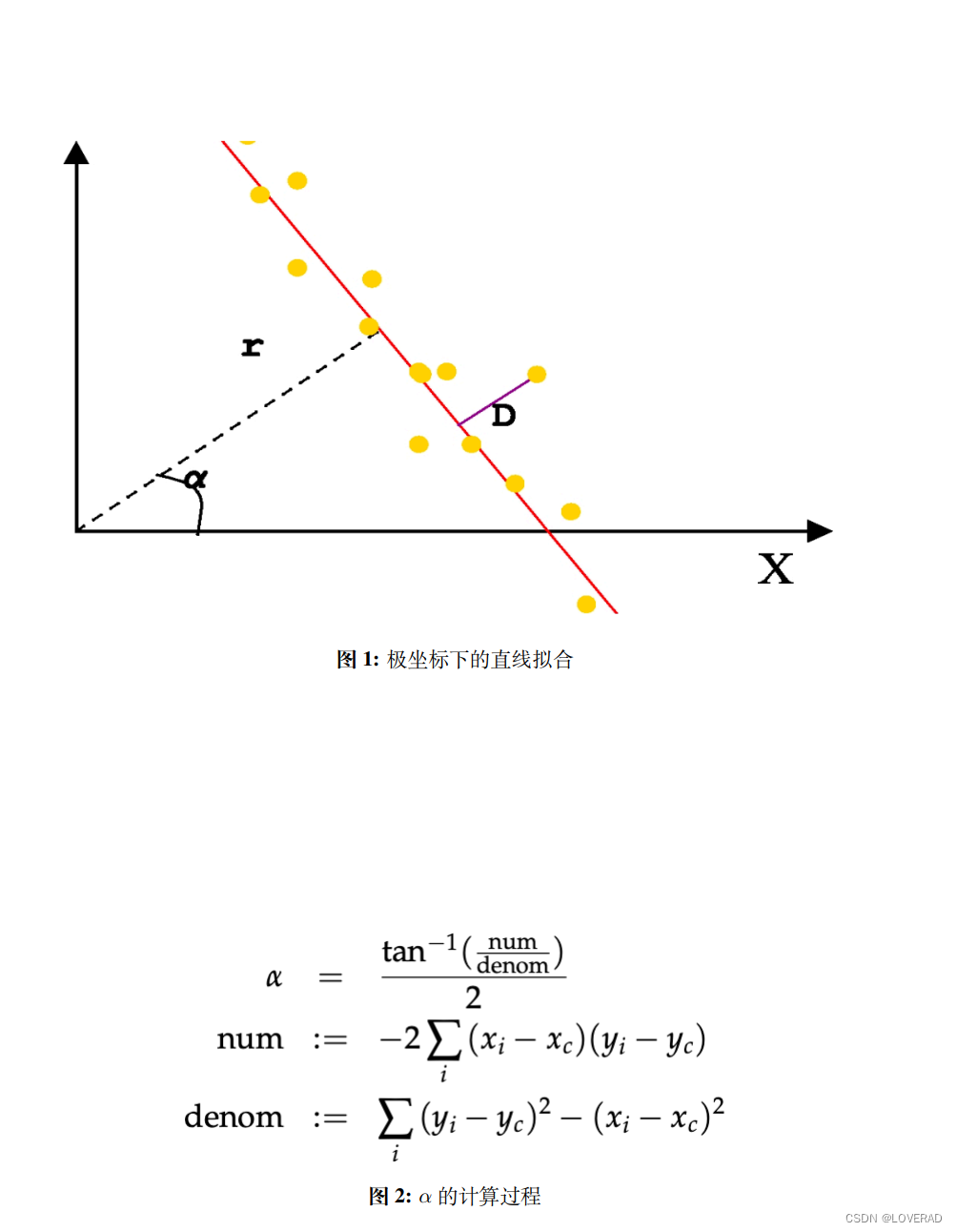
2 任务一: 直线拟合
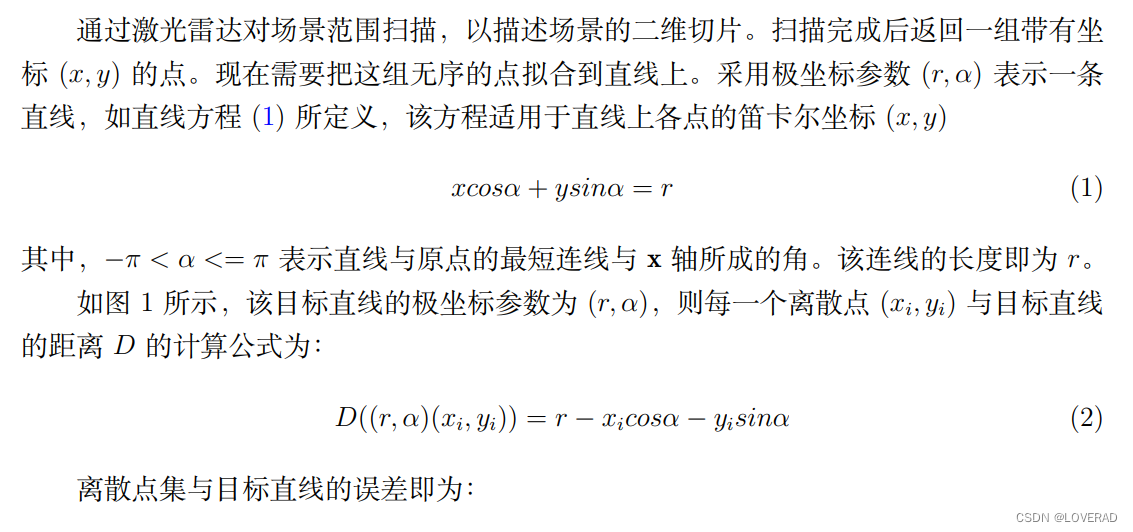
2.1 内容分析
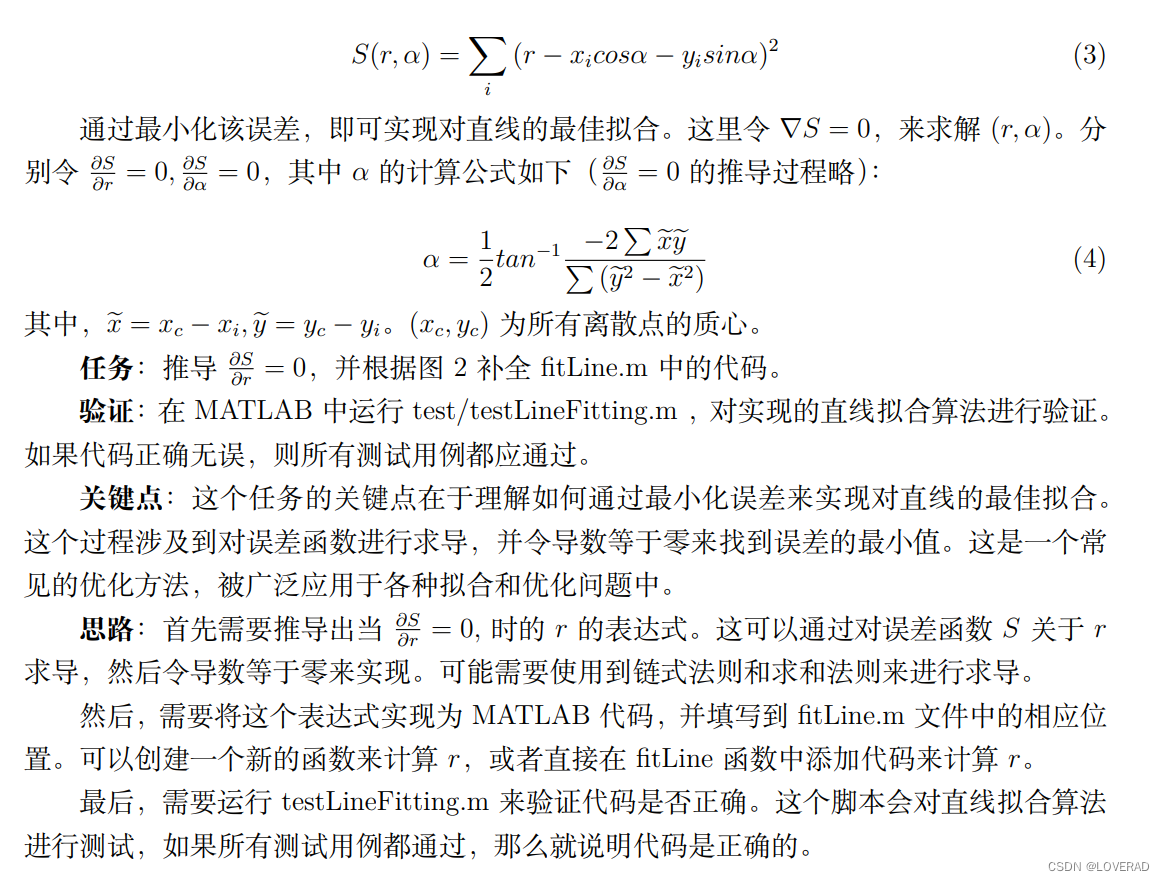
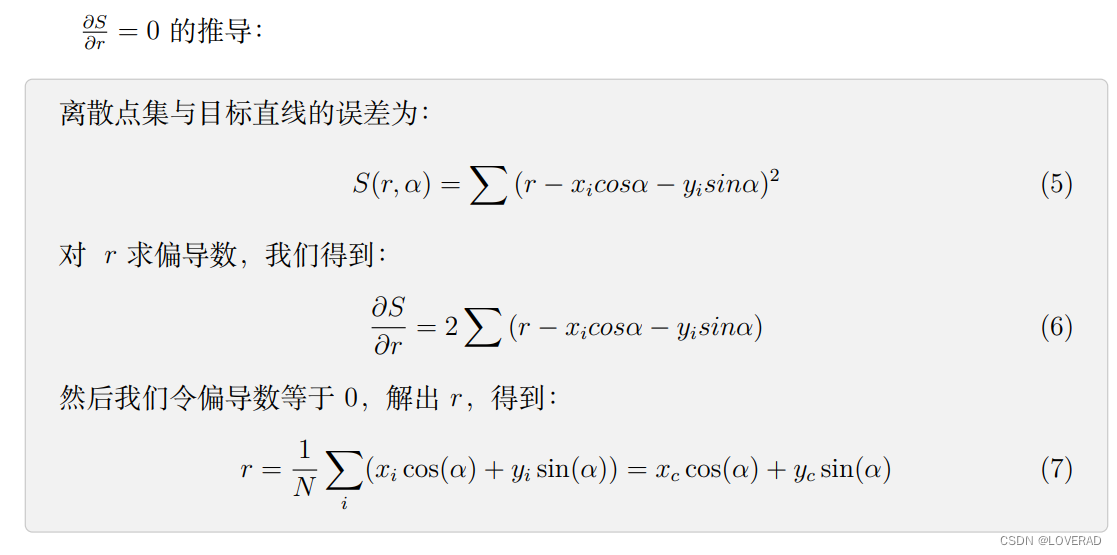
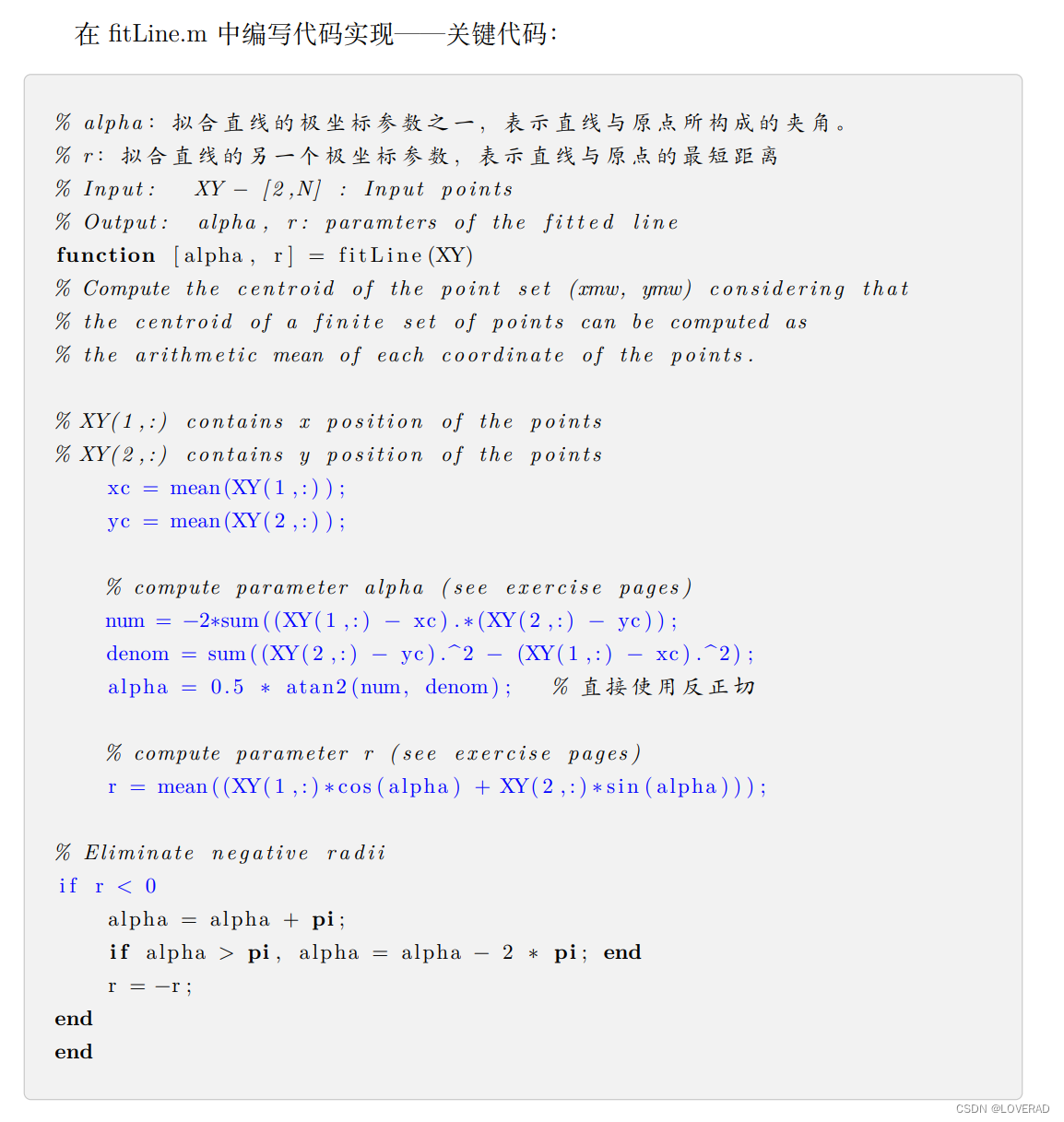
2.2 过程分析
2.3 结果分析
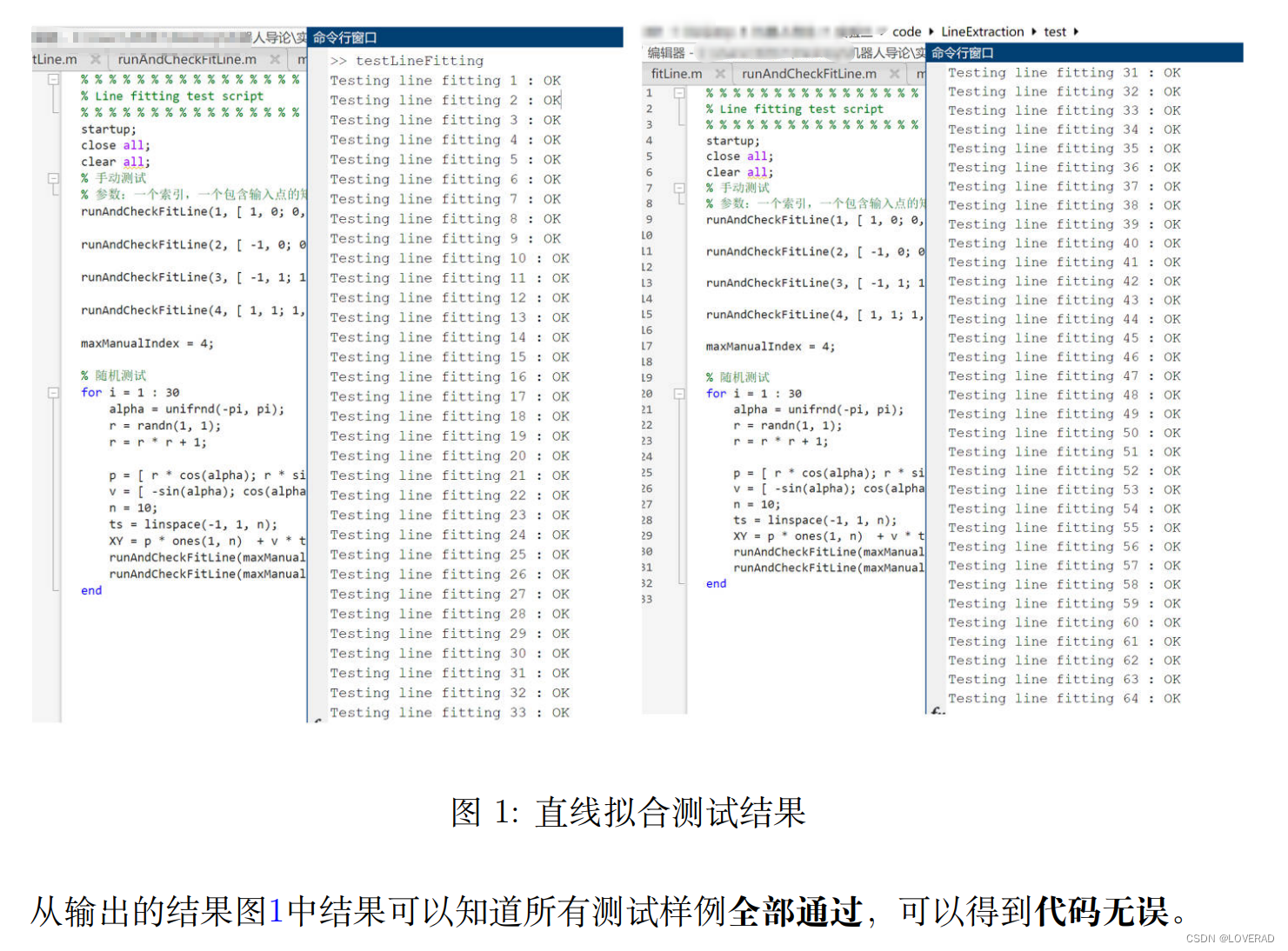
在 MATLAB 中运行 test/testLineFitting.m ,对实现的直线拟合算法进行验证:
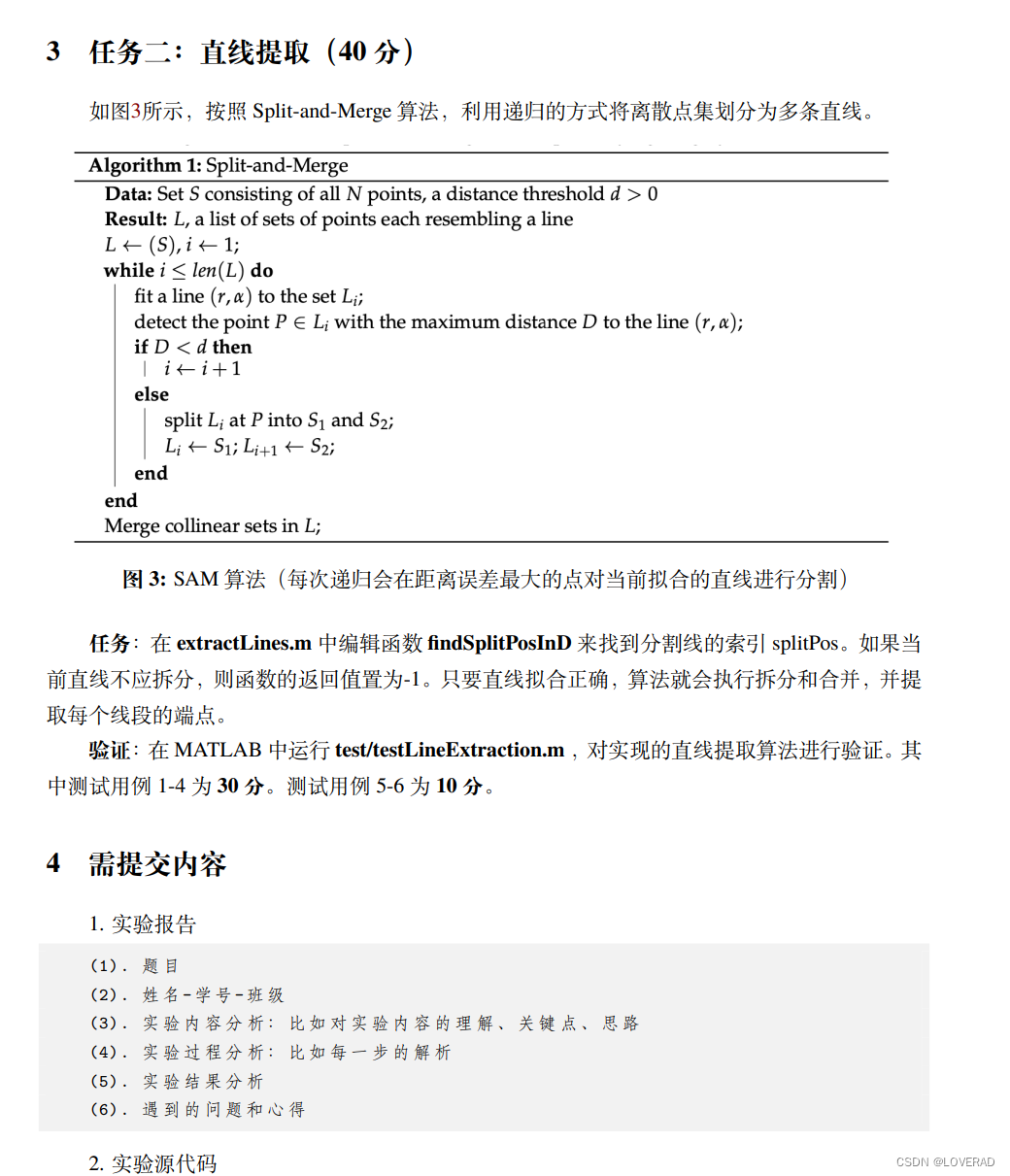
3 任务二:直线提取
3.1 内容分析
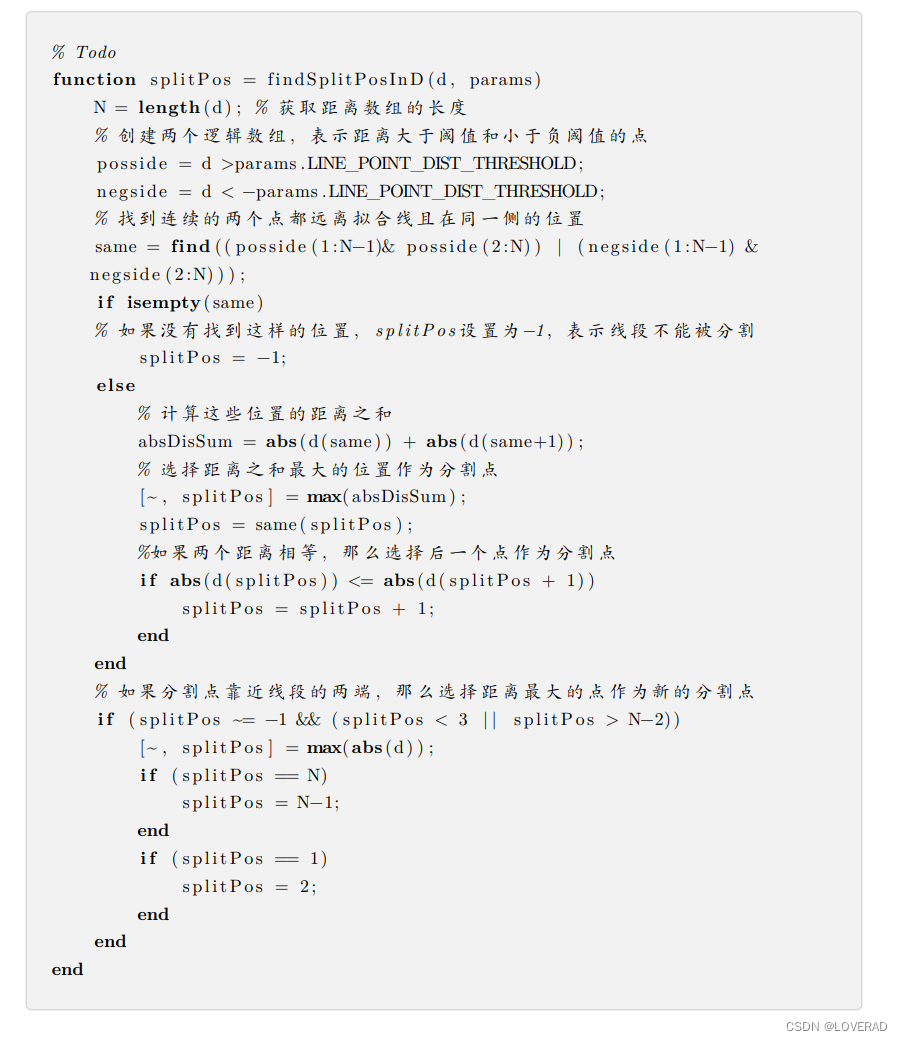
3.2 过程分析

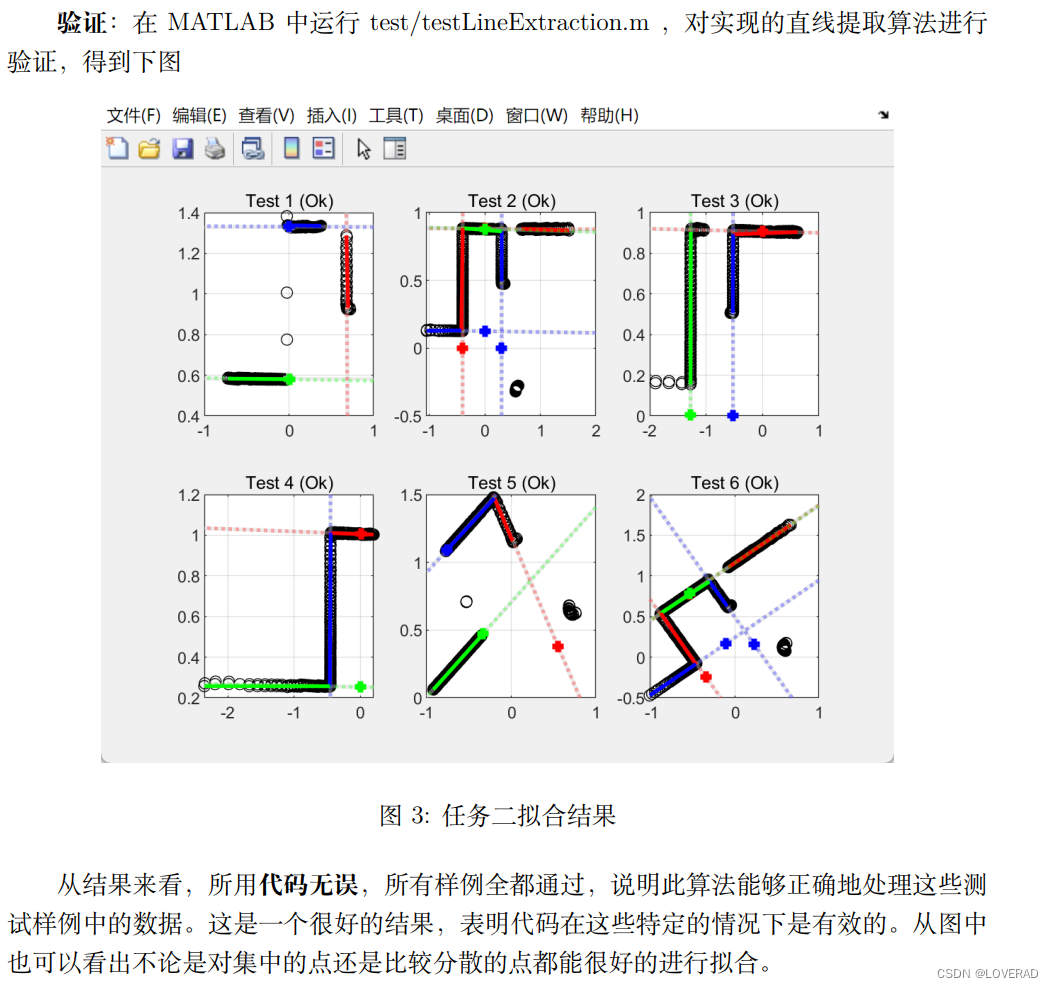
3.3 结果分析
4 遇到的问题和心得
 该博客介绍了机器人学实验中的两个关键任务:直线拟合与提取。在任务一中,详细分析了直线拟合的内容、过程及结果,通过MATLAB的testLineFitting.m文件进行了算法验证。在任务二,博主探讨了直线提取的细节,同样包括内容、过程和结果的分析,并分享了实验过程中遇到的问题和心得体会。
该博客介绍了机器人学实验中的两个关键任务:直线拟合与提取。在任务一中,详细分析了直线拟合的内容、过程及结果,通过MATLAB的testLineFitting.m文件进行了算法验证。在任务二,博主探讨了直线提取的细节,同样包括内容、过程和结果的分析,并分享了实验过程中遇到的问题和心得体会。
目录
机器人导论实验-机器人定位中的直线拟合与提取
1 实验目的
2 任务一: 直线拟合
2.1 内容分析
2.2 过程分析
2.3 结果分析
在 MATLAB 中运行 test/testLineFitting.m ,对实现的直线拟合算法进行验证:
3 任务二:直线提取
3.1 内容分析
3.2 过程分析
3.3 结果分析
4 遇到的问题和心得

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言