







项目汇总整理:
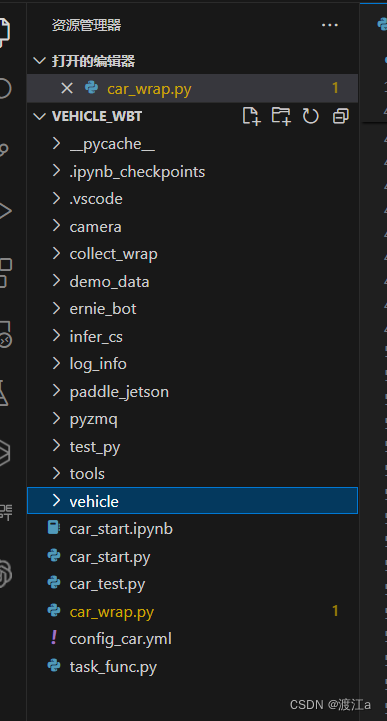
我们最终的项目如图所示:其中主要使用的是 car_wrap.py实现的自动巡航,在自动巡航的过程中应该完成对应的任务,其中单个的任务检测我们已经完成,但是将任务整个串联起来变成对应的巡航过程中的操作还需要继续调参改进。
这里对每个目录下的文件进行解释:
目录及文件解释
-
camera- 存放与摄像头相关的代码或配置文件,可能用于图像采集和处理。
-
collect_wrap- 可能包含数据采集相关的脚本,例如从传感器收集数据。
-
demo_data- 存放示例数据或测试数据,用于开发和测试期间的验证。
-
ernie_bot- 存放与
Ernie Bot相关的代码,Ernie Bot可能是一个基于某种模型的聊天机器人或自然语言处理服务。
- 存放与
-
infer_cs- 包含模型推理(Inference)的代码。
-
log_info- 存放日志相关的代码,用于记录运行日志或错误信息。
-
paddle_jetson- 包含使用 PaddlePaddle 框架在 NVIDIA Jetson 硬件上运行的代码,专门用于深度学习或机器学习任务。
-
pyzmq- 包含使用 ZeroMQ 库的代码,ZeroMQ 是一个高性能的异步消息库,用于构建分布式或并发应用。
-
test.py- 一个测试脚本,用于运行项目的测试。
-
tools- 存放各种工具性质的代码,可能包含助手函数或通用库。
-
vehicle-
专门用于处理与车辆或机器人移动有关的代码。
-
子目录和文件:
car_start.ipynb:一个 Jupyter 笔记本文件,可能用于启动车辆或进行初始化设置。car_start.py:一个 Python 脚本,功能可能与car_start.ipynb相似,用于启动车辆系统。car_test.py:用于测试车辆功能的脚本。car_wrap.py:车辆操作的高级功能。config_car.yml:车辆配置的 YAML 文件,包含车辆的设置或参数。task_func.py:包含定义车辆任务的函数或类。
-
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









