







一、OTSU算法原理
➢OTSU法(最大类间方差法,有时也称之为大津算法)
➢ 使用聚类的思想,把图像的灰度数按灰度级分成2个部分, 使得两个部分之间的灰度值差异最大,每个部分之间的灰 度差异最小
➢ 通过方差的计算来寻找一个合适的灰度级别来划分。
➢ 可以在二值化的时候采用OTSU算法来自动选取阈值进行 二值化。
➢ OTSU算法被认为是图像分割中阈值选取的最佳算法,计 算简单,不受图像亮度和对比度的影响。
➢ 因此,使类间方差最大的分割意味着错分概率最小。
二、OTSU算法步骤:
全局阈值T可以按如下计算:
➢选择一个初时估计值T (一般为图像的平均灰度值)
➢使用T分割图像,产生两组像素:G1包括灰度级大于 T的像素,G2包括灰度级小于等于T的像素
➢计算G1 中像素的平均值并赋值给μ1,计算G2 中像素 的平均值并赋值给μ2
➢计算一个新的阈值:
➢重复步骤 2 ~ 4,一直到两次连续的T之间的差小于 预先给定的上界T∞
三、代码实现
当我们用边缘梯度算子(如Roberts、Soberl、Prewitt等)处理原始图像拿到梯度图之后,可以创建一个1*256维的数组来存放梯度图中每个像素的个数,其具体的实现方式如下:
int pixel_num[256] = { 0 }; //数组记得初始化为0,即未统计数量之前各个像素的个数都是0
for (int row = 0; row < img.rows; row++) {
for (int col = 0; col < img.cols; col++) {
pixel_num01[Sobel_City.at<uchar>(row, col)] += 1; //遍历到的像素值作为索引,次数+1
}
}以下是OTSU的实现方法:
①由传入的梯度图拿到图像的维度,创建一个空白图像用于保留运算得到的结果,并且拿到梯度图像的总像素个数。
Mat OTSU = Mat::zeros(Size(img.cols, img.rows), img.type());
int N = img.rows * img.cols;②由像素数量数组,得到每一个像素对应的概率:
double pro[256] = { 0 }; // 定义概率数组
for (int i = 0; i < 256; i++) {
pro[i] = arr[i] / N; // 得到每个像素值的概率
}注意创建的概率数组是浮点型,定义为整形的话会出现全部像素的概率都为零的情况。
③依次创建OTSU计算的过程量,包括两类的概率、均值,还有阈值T以及方差v等等;先计算得到两类的均值以及概率,根据公式v = w0 * w1 * pow(u1 - u0, 2);就可以得到此次遍历的像素作为阈值得到的方差。
double delta = 0, w0 = 0, w1 = 0, u0 = 0, u1 = 0, v = 0; // 变量初始化为0
int T = 0, thresh = 0;
while (T <= 255) {
for (int i = 0; i <= T; i++) {
w0 += pro[i]; // C0的概率
}
w1 = 1 - w0; // C1的概率
for (int i = 0; i <= 255; i++) {
if (i <= T) {
u0 += pro[i] * i; // C0的平均值
}
else {
u1 += pro[i] * i; // C1的平均值
}
v = w0 * w1 * pow(u1 - u0, 2);
if (v > delta) {
delta = v;
thresh = T;
}
T += 1;
}
}遍历循环的过程中要对方差进行判断,如果此次计算的方差要比之前的最大方差delta要大,那么对delta进行更新,同时也用thresh记录下历史最大方差对应的像素值,作为分割的阈值T。这样一来,遍历的结果就可以得到我们想要的,能使两类差异最大的阈值T。
④通过对与梯度图同维大小的空白图片遍历,给每一个像素进行二值化。若遍历到的像素值大于等于T,则赋值为255,否则为0。
for (int row = 0; row < img.rows; row++) {
for (int col = 0; col < img.cols; col++) {
if (img.at<uchar>(row, col) > thresh) { //遍历判断
OTSU.at<uchar>(row, col) = 255;
}
}
}⑤显示OTSU图像,得到阈值分割结果:
imshow("OTSU阈值分割", OTSU);
waitKey(0);
destroyAllWindows();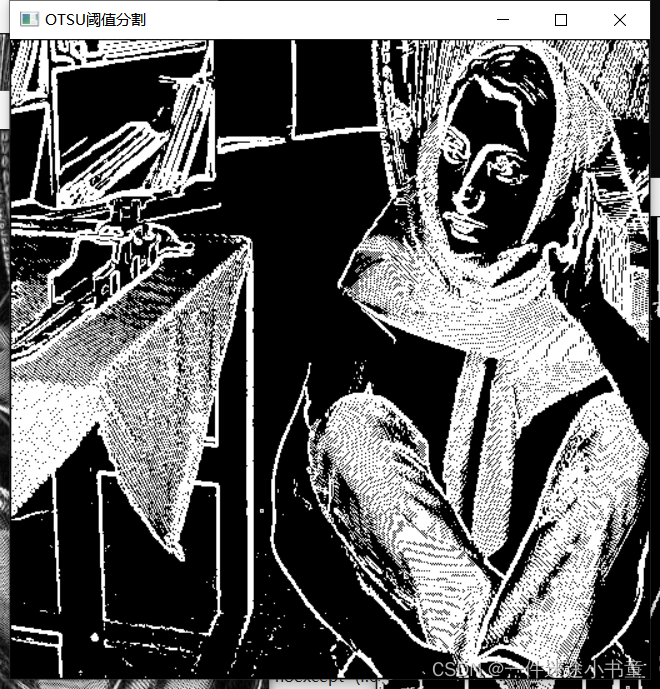
四、代码汇总
#include<opencv2/opencv.hpp>
#include<iostream>
#include<math.h>
using namespace cv;
using namespace std;
void Sobel(Mat img);
void OTSU(Mat& img, int arr[]);
int main() {
Mat Gray = imread("C:\\Users\\Czhannb\\Desktop\\gray.png", IMREAD_GRAYSCALE);
if (Gray.empty()) {
cout << "读取图片错误!" << endl;
}
else {
imshow("未动工之前:", Gray);
}
Sobel(Gray);
return 0;
}
void OTSU(Mat& img, int arr[]) { // 需要输入待处理的图像 和 直方图像素个数数组
int N = img.rows * img.cols; // 统计输入图像的像素个数N
double pro[256] = { 0 }; // 定义概率数组
for (int i = 0; i < 256; i++) {
pro[i] = arr[i] / N; // 得到每个像素值的概率
}
double delta = 0, w0 = 0, w1 = 0, u0 = 0, u1 = 0, v = 0; // 变量初始化为0
int T = 0, thresh = 0;
while (T <= 255) {
for (int i = 0; i <= T; i++) {
w0 += pro[i]; // C0的概率
}
w1 = 1 - w0; // C1的概率
for (int i = 0; i <= 255; i++) {
if (i <= T) {
u0 += pro[i] * i; // C0的平均值
}
else {
u1 += pro[i] * i; // C1的平均值
}
v = w0 * w1 * pow(u1 - u0, 2);
if (v > delta) {
delta = v;
thresh = T;
}
T += 1;
}
}
Mat OTSU = Mat::zeros(Size(img.cols, img.rows), img.type());
for (int row = 0; row < img.rows; row++) {
for (int col = 0; col < img.cols; col++) {
if (img.at<uchar>(row, col) > int(thresh)) {
OTSU.at<uchar>(row, col) = 255;
}
}
}
imshow("OTSU阈值分割", OTSU);
waitKey(0);
destroyAllWindows();
}
void Sobel(Mat img) { // 基于Prewitt算子的阈值分割
Mat Sobel_City = Mat::zeros(Size(img.cols, img.rows), img.type()); //用于计算城市距离的空白图像
Mat Sobel_Ojld = Mat::zeros(Size(img.cols, img.rows), img.type()); //用于计算欧几里得距离的空白图像
for (int row = 1; row < img.rows - 1; row++) {
for (int col = 1; col < img.cols - 1; col++) { // 由于像素之间的加减可能会小于零,因此记得加上绝对值函数fabs()
Sobel_City.at<uchar>(row, col) = saturate_cast<uchar>(fabs(img.at<uchar>(row - 1, col + 1) - img.at<uchar>(row - 1, col - 1) + 2*img.at<uchar>(row, col + 1) - 2*img.at<uchar>(row, col - 1) + img.at<uchar>(row + 1, col + 1) - img.at<uchar>(row + 1, col - 1)) + fabs(img.at<uchar>(row + 1, col - 1) - img.at<uchar>(row - 1, col - 1) + 2*img.at<uchar>(row + 1, col) - 2*img.at<uchar>(row - 1, col) + img.at<uchar>(row + 1, col + 1) - img.at<uchar>(row - 1, col + 1)));
}
}
for (int row = 1; row < img.rows - 1; row++) {
for (int col = 1; col < img.cols - 1; col++) {
Sobel_Ojld.at<uchar>(row, col) = saturate_cast<uchar>(sqrt(pow(img.at<uchar>(row - 1, col + 1) - img.at<uchar>(row - 1, col - 1) + 2*img.at<uchar>(row, col + 1) - 2*img.at<uchar>(row, col - 1) + img.at<uchar>(row + 1, col + 1) - img.at<uchar>(row + 1, col - 1), 2) + pow(img.at<uchar>(row + 1, col - 1) - img.at<uchar>(row - 1, col - 1) + 2*img.at<uchar>(row + 1, col) - 2*img.at<uchar>(row - 1, col) + img.at<uchar>(row + 1, col + 1) - img.at<uchar>(row - 1, col + 1), 2)));
}
}
imshow("Sobel图像(街区距离)", Sobel_City);
imshow("Sobel图像(欧几里得距离)", Sobel_Ojld);
int pixel_num01[256] = { 0 }; //数组记得初始化为0,即未统计数量之前各个像素的个数都是0
for (int row = 0; row < img.rows; row++) {
for (int col = 0; col < img.cols; col++) {
pixel_num01[Sobel_Ojld.at<uchar>(row, col)] += 1; //遍历到的像素值作为索引,次数+1
}
}
int times = 0; //定义遍历数组的变量,从0开始,依次输出0到255每个像素值的数目
while (times <= 255) {
cout << "像素值" << times << "的数目为: " << pixel_num01[times] << endl; // 遍历输出
times++; // 不要忘了自增
}
//得到10作为分割阈值
for (int row = 0; row < img.rows; row++) {
for (int col = 0; col < img.cols; col++) { //遍历所有像素点进行判断
if (Sobel_Ojld.at<uchar>(row, col) < 70) {
Sobel_Ojld.at<uchar>(row, col) = 0; // 小于阈值赋值为0,否则赋值255
}
else {
Sobel_Ojld.at<uchar>(row, col) = 255;
}
}
}
imshow("欧几里得阈值分割", Sobel_Ojld);
int pixel_num02[256] = { 0 }; //数组记得初始化为0,即未统计数量之前各个像素的个数都是0
for (int row = 0; row < img.rows; row++) {
for (int col = 0; col < img.cols; col++) {
pixel_num01[Sobel_City.at<uchar>(row, col)] += 1; //遍历到的像素值作为索引,次数+1
}
}
int time = 0; //定义遍历数组的变量,从0开始,依次输出0到255每个像素值的数目
while (times <= 255) {
cout << "像素值" << time << "的数目为: " << pixel_num02[time] << endl; // 遍历输出
time++; // 不要忘了自增
}
OTSU(Sobel_Ojld, pixel_num01); // OTSU阈值分割
OTSU(Sobel_City, pixel_num02);
}















 2848
2848











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









