






文章目录
一、采用stm32F103和HC-SR04超声波模块, 使用标准库或HAL库+ 定时器中断,完成1或2路的超声波障碍物测距功能
1.定时器模块
Timer.c
#include "stm32f10x.h" // Device header
void Timer_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //启用TIM3时钟
TIM_InternalClockConfig(TIM3); //设置TIM3使用内部时钟
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体,配置定时器
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置1分频(不分频)
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //设置计数模式为向上计数
TIM_TimeBaseInitStructure.TIM_Period = 10 - 1; //设置最大计数值,达到最大值触发更新事件,因为从0开始计数,所以计数10次是10-1,每10微秒触发一次
TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //设置时钟预分频,72-1就是每 时钟频率(72Mhz)/72=1000000 个时钟周期计数器加1,每1微秒+1
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器(高级定时器才有,所以设置0)
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure); //初始化TIM3定时器
TIM_ClearFlag(TIM3, TIM_FLAG_Update); //清除更新中断标志位
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE); //开启更新中断
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置中断优先级分组
NVIC_InitTypeDef NVIC_InitStructure; //定义结构体,配置中断优先级
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //指定中断通道
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //中断使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //设置抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //设置响应优先级
NVIC_Init(&NVIC_InitStructure); // https://blog.zeruns.tech
TIM_Cmd(TIM3, ENABLE); //开启定时器
}
Timer.h
#ifndef __TIMER_H
#define __TIMER_H
void Timer_Init(void);
#endif
2.HC-SR04模块
HCSR04.c
#include "stm32f10x.h"
#include "Delay.h"
#define Echo GPIO_Pin_0 //HC-SR04模块的Echo脚接GPIOB0
#define Trig GPIO_Pin_1 //HC-SR04模块的Trig脚接GPIOB1
uint64_t time=0; //声明变量,用来计时
uint64_t time_end=0; //声明变量,存储回波信号时间
void HC_SR04_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //启用GPIOB的外设时钟
GPIO_InitTypeDef GPIO_InitStructure; //定义结构体
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //设置GPIO口为推挽输出
GPIO_InitStructure.GPIO_Pin = Trig; //设置GPIO口5
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置GPIO口速度50Mhz
GPIO_Init(GPIOB,&GPIO_InitStructure); //初始化GPIOB
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //设置GPIO口为下拉输入模式
GPIO_InitStructure.GPIO_Pin = Echo; //设置GPIO口6
GPIO_Init(GPIOB,&GPIO_InitStructure); //初始化GPIOB
GPIO_WriteBit(GPIOB,GPIO_Pin_5,0); //输出低电平
Delay_us(15); //延时15微秒
}
int16_t sonar_mm(void) //测距并返回单位为毫米的距离结果
{
uint32_t Distance,Distance_mm = 0;
GPIO_WriteBit(GPIOB,Trig,1); //输出高电平
Delay_us(15); //延时15微秒
GPIO_WriteBit(GPIOB,Trig,0); //输出低电平
while(GPIO_ReadInputDataBit(GPIOB,Echo)==0); //等待低电平结束
time=0; //计时清零
while(GPIO_ReadInputDataBit(GPIOB,Echo)==1); //等待高电平结束
time_end=time; //记录结束时的时间
if(time_end/100<38) //判断是否小于38毫秒,大于38毫秒的就是超时,直接调到下面返回0
{
Distance=(time_end*346)/2; //计算距离,25°C空气中的音速为346m/s
Distance_mm=Distance/100; //因为上面的time_end的单位是10微秒,所以要得出单位为毫米的距离结果,还得除以100
}
return Distance_mm; //返回测距结果
}
float sonar(void) //测距并返回单位为米的距离结果
{
uint32_t Distance,Distance_mm = 0;
float Distance_m=0;
GPIO_WriteBit(GPIOB,Trig,1); //输出高电平
Delay_us(15);
GPIO_WriteBit(GPIOB,Trig,0); //输出低电平
while(GPIO_ReadInputDataBit(GPIOB,Echo)==0);
time=0;
while(GPIO_ReadInputDataBit(GPIOB,Echo)==1);
time_end=time;
if(time_end/100<38)
{
Distance=(time_end*346)/2;
Distance_mm=Distance/100;
Distance_m=Distance_mm/1000;
}
return Distance_m;
}
void TIM3_IRQHandler(void) //更新中断函数,用来计时,每10微秒变量time加1
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) == SET) //获取TIM3定时器的更新中断标志位
{
time++;
TIM_ClearITPendingBit(TIM3, TIM_IT_Update); //清除更新中断标志位
}
}
HCSR04.h
#ifndef __HCSR04_H
#define __HCSR04_H
void HC_SR04_Init(void);
int16_t sonar_mm(void);
float sonar(void);
#endif
3.OLED模块
OLED.c
#include "stm32f10x.h"
#include "OLED_Font.h"
/*引脚配置*/
#define OLED_W_SCL(x) GPIO_WriteBit(GPIOB, GPIO_Pin_8, (BitAction)(x))
#define OLED_W_SDA(x) GPIO_WriteBit(GPIOB, GPIO_Pin_9, (BitAction)(x))
/*引脚初始化*/
void OLED_I2C_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_Init(GPIOB, &GPIO_InitStructure);
OLED_W_SCL(1);
OLED_W_SDA(1);
}
/**
* @brief I2C开始
* @param 无
* @retval 无
*/
void OLED_I2C_Start(void)
{
OLED_W_SDA(1);
OLED_W_SCL(1);
OLED_W_SDA(0);
OLED_W_SCL(0);
}
/**
* @brief I2C停止
* @param 无
* @retval 无
*/
void OLED_I2C_Stop(void)
{
OLED_W_SDA(0);
OLED_W_SCL(1);
OLED_W_SDA(1);
}
/**
* @brief I2C发送一个字节
* @param Byte 要发送的一个字节
* @retval 无
*/
void OLED_I2C_SendByte(uint8_t Byte)
{
uint8_t i;
for (i = 0; i < 8; i++)
{
OLED_W_SDA(Byte & (0x80 >> i));
OLED_W_SCL(1);
OLED_W_SCL(0);
}
OLED_W_SCL(1); //额外的一个时钟,不处理应答信号
OLED_W_SCL(0);
}
/**
* @brief OLED写命令
* @param Command 要写入的命令
* @retval 无
*/
void OLED_WriteCommand(uint8_t Command)
{
OLED_I2C_Start();
OLED_I2C_SendByte(0x78); //从机地址
OLED_I2C_SendByte(0x00); //写命令
OLED_I2C_SendByte(Command);
OLED_I2C_Stop();
}
/**
* @brief OLED写数据
* @param Data 要写入的数据
* @retval 无
*/
void OLED_WriteData(uint8_t Data)
{
OLED_I2C_Start();
OLED_I2C_SendByte(0x78); //从机地址
OLED_I2C_SendByte(0x40); //写数据
OLED_I2C_SendByte(Data);
OLED_I2C_Stop();
}
/**
* @brief OLED设置光标位置
* @param Y 以左上角为原点,向下方向的坐标,范围:0~7
* @param X 以左上角为原点,向右方向的坐标,范围:0~127
* @retval 无
*/
void OLED_SetCursor(uint8_t Y, uint8_t X)
{
OLED_WriteCommand(0xB0 | Y); //设置Y位置
OLED_WriteCommand(0x10 | ((X & 0xF0) >> 4)); //设置X位置高4位
OLED_WriteCommand(0x00 | (X & 0x0F)); //设置X位置低4位
}
/**
* @brief OLED清屏
* @param 无
* @retval 无
*/
void OLED_Clear(void)
{
uint8_t i, j;
for (j = 0; j < 8; j++)
{
OLED_SetCursor(j, 0);
for(i = 0; i < 128; i++)
{
OLED_WriteData(0x00);
}
}
}
/**
* @brief OLED显示一个字符
* @param Line 行位置,范围:1~4
* @param Column 列位置,范围:1~16
* @param Char 要显示的一个字符,范围:ASCII可见字符
* @retval 无
*/
void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char)
{
uint8_t i;
OLED_SetCursor((Line - 1) * 2, (Column - 1) * 8); //设置光标位置在上半部分
for (i = 0; i < 8; i++)
{
OLED_WriteData(OLED_F8x16[Char - ' '][i]); //显示上半部分内容
}
OLED_SetCursor((Line - 1) * 2 + 1, (Column - 1) * 8); //设置光标位置在下半部分
for (i = 0; i < 8; i++)
{
OLED_WriteData(OLED_F8x16[Char - ' '][i + 8]); //显示下半部分内容
}
}
/**
* @brief OLED显示字符串
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param String 要显示的字符串,范围:ASCII可见字符
* @retval 无
*/
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i++)
{
OLED_ShowChar(Line, Column + i, String[i]);
}
}
/**
* @brief OLED次方函数
* @retval 返回值等于X的Y次方
*/
uint32_t OLED_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y--)
{
Result *= X;
}
return Result;
}
/**
* @brief OLED显示数字(十进制,正数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~4294967295
* @param Length 要显示数字的长度,范围:1~10
* @retval 无
*/
void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i++)
{
OLED_ShowChar(Line, Column + i, Number / OLED_Pow(10, Length - i - 1) % 10 + '0');
}
}
/**
* @brief OLED显示数字(十进制,带符号数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:-2147483648~2147483647
* @param Length 要显示数字的长度,范围:1~10
* @retval 无
*/
void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length)
{
uint8_t i;
uint32_t Number1;
if (Number >= 0)
{
OLED_ShowChar(Line, Column, '+');
Number1 = Number;
}
else
{
OLED_ShowChar(Line, Column, '-');
Number1 = -Number;
}
for (i = 0; i < Length; i++)
{
OLED_ShowChar(Line, Column + i + 1, Number1 / OLED_Pow(10, Length - i - 1) % 10 + '0');
}
}
/**
* @brief OLED显示数字(十六进制,正数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~0xFFFFFFFF
* @param Length 要显示数字的长度,范围:1~8
* @retval 无
*/
void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{
uint8_t i, SingleNumber;
for (i = 0; i < Length; i++)
{
SingleNumber = Number / OLED_Pow(16, Length - i - 1) % 16;
if (SingleNumber < 10)
{
OLED_ShowChar(Line, Column + i, SingleNumber + '0');
}
else
{
OLED_ShowChar(Line, Column + i, SingleNumber - 10 + 'A');
}
}
}
/**
* @brief OLED显示数字(二进制,正数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~1111 1111 1111 1111
* @param Length 要显示数字的长度,范围:1~16
* @retval 无
*/
void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i++)
{
OLED_ShowChar(Line, Column + i, Number / OLED_Pow(2, Length - i - 1) % 2 + '0');
}
}
/**
* @brief OLED初始化
* @param 无
* @retval 无
*/
void OLED_Init(void)
{
uint32_t i, j;
for (i = 0; i < 1000; i++) //上电延时
{
for (j = 0; j < 1000; j++);
}
OLED_I2C_Init(); //端口初始化
OLED_WriteCommand(0xAE); //关闭显示
OLED_WriteCommand(0xD5); //设置显示时钟分频比/振荡器频率
OLED_WriteCommand(0x80);
OLED_WriteCommand(0xA8); //设置多路复用率
OLED_WriteCommand(0x3F);
OLED_WriteCommand(0xD3); //设置显示偏移
OLED_WriteCommand(0x00);
OLED_WriteCommand(0x40); //设置显示开始行
OLED_WriteCommand(0xA1); //设置左右方向,0xA1正常 0xA0左右反置
OLED_WriteCommand(0xC8); //设置上下方向,0xC8正常 0xC0上下反置
OLED_WriteCommand(0xDA); //设置COM引脚硬件配置
OLED_WriteCommand(0x12);
OLED_WriteCommand(0x81); //设置对比度控制
OLED_WriteCommand(0xCF);
OLED_WriteCommand(0xD9); //设置预充电周期
OLED_WriteCommand(0xF1);
OLED_WriteCommand(0xDB); //设置VCOMH取消选择级别
OLED_WriteCommand(0x30);
OLED_WriteCommand(0xA4); //设置整个显示打开/关闭
OLED_WriteCommand(0xA6); //设置正常/倒转显示
OLED_WriteCommand(0x8D); //设置充电泵
OLED_WriteCommand(0x14);
OLED_WriteCommand(0xAF); //开启显示
OLED_Clear(); //OLED清屏
}
OLED.h
#ifndef __OLED_H
#define __OLED_H
void OLED_Init(void);
void OLED_Clear(void);
void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char);
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String);
void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);
void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length);
void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);
void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);
#endif
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Timer.h"
#include "HCSR04.h"
uint64_t numlen(uint64_t num)//计算数字的长度
{
uint64_t len = 1; // 初始长度为1
for(; num > 9; ++len) // 判断num是否大于9,否则长度+1
num /= 10; // 使用除法进行运算,直到num小于1
return len; // 返回长度的值
}
int main(void)
{
OLED_Init(); //初始化OLED屏
Timer_Init(); //初始化定时器
HC_SR04_Init(); //初始化超声波测距模块
OLED_ShowString(1, 1, "Distance:"); //OLED屏输出字符串
while (1)
{
int Distance_mm=sonar_mm(); //获取距离测量结果,单位毫米(mm)
int Distance_m=Distance_mm/1000; //转换为米(m)为单位,将整数部分放入Distance_m
int Distance_m_p=Distance_mm%1000; //转换为米(m)为单位,将小数部分放入Distance_m_p
OLED_ShowString(2,1," "); //将OLDE屏第2行清屏
OLED_ShowNum(2, 1,Distance_m,numlen(Distance_m)); //显示测量结果的整数部分
OLED_ShowChar(2, 1+numlen(Distance_m), '.'); //显示小数点
if(Distance_m_p<100) //判断是否小于100毫米
{
OLED_ShowChar(2, 1+numlen(Distance_m)+1,'0'); //因为单位是米,所以小于10cm时要加0
OLED_ShowNum(2, 1+numlen(Distance_m)+2,Distance_m_p,numlen(Distance_m_p)); //显示测量结果的小数部分
OLED_ShowChar(2, 1+numlen(Distance_m)+2+numlen(Distance_m_p), 'm'); //显示单位
}
else
{
OLED_ShowNum(2, 1+numlen(Distance_m)+1,Distance_m_p,numlen(Distance_m_p)); //显示测量结果的小数部分
OLED_ShowChar(2, 1+numlen(Distance_m)+1+numlen(Distance_m_p), 'm'); //显示单位
}
OLED_ShowString(3,1," "); //将OLDE屏第3行清屏
OLED_ShowNum(3, 1,Distance_mm,numlen(Distance_mm)); //显示单位为毫米的距离结果
OLED_ShowString(3, 1 + numlen(Distance_mm), "mm");
Delay_ms(300); //延时300毫秒
}
}
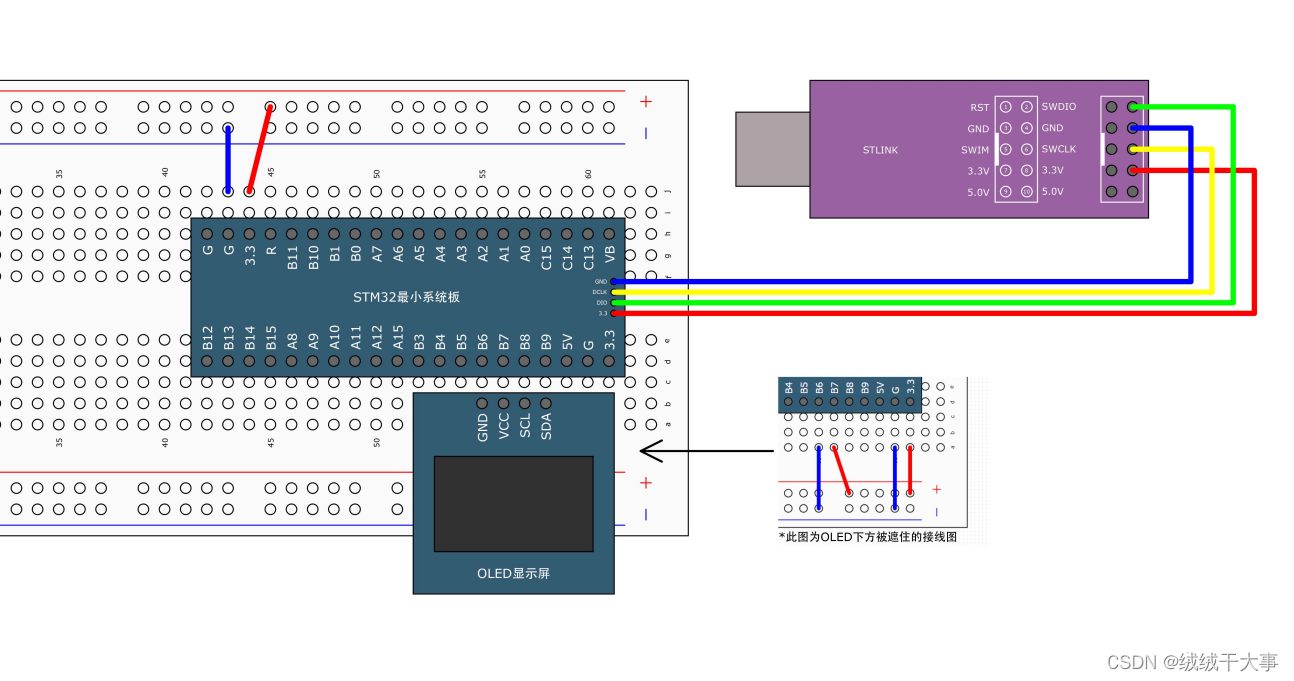
4.接线
HC-SR04
HC-SR04 STM32
VCC 5V供电
Trig PB1
Echo PB0
GND GND
OLED
编译烧录
二、当前智能汽车上一般配置有12路超声波雷达,这些专用超声波雷达内置了MCU,直接输出数字化的测距结果,一般硬件接口采用串口RS485,通信协议采用modbus。
1.RS485与RS232(UART)有什么不同?
1.RS232是一种单向通信协议,即通信数据只能在一条线上单向传输。而RS485则支持多个节点的双向通信,可以在一个总线上连接多个设备进行通信。
2.RS232最远只能传输15米,而RS485最远可以传输1200米左右。这是因为RS485使用差分信号传输,具有良好的抗干扰性能,可以有效地减小信号衰减和干扰。
3.RS485还支持半双工和全双工通信模式,具有更高的传输速率和更低的误码率。
4.RS232的通信电平是正负12V,而RS485的电平范围是-7V到+12V。
2.Modbus协议是什么?
Modbus 是由 Modicon(现为施耐德电气公司的一个品牌)在 1979 年发明的一种工业控制总线协议,是全球第一个真正用于工业现场的总线协议。Modbus 以其简单、健壮、开放而且不需要特许授权的特点,成为通用通信协议。为了适应以太网环境,Modbus 被封装在 TCP 包中,并且在默认情况下通过 TCP 协议的 502 端口进行传输。
基于 Modbus 协议的系统由带智能终端的可编程逻辑控制器和计算机通过公用线路或局部专用线路连接而成。其系统结构既包括硬件,又包括软件。可应用于各种数据采集和过程监控。
Modbus 协议采用主 - 从结构,为客户机和服务器之间提供通信连接。
Modbus 协议定义了一个与基础通信无关的协议数据单元(Protocol Description Unit,PDU),描述协议的基本功能。PDU 属于应用数据单元(Application Data Unit,ADU)的一部分,除此之外,ADU 还包括附加地址域和差错校验域及实际传输的数据,这个数据可能是业务数据,也可能是指令、响应信息或报警信息等。
Modbus 协议类型解析
Modbus包括三种协议:Modbus-RTU、Modbus-ASCII和Modbus-TCP。这三种协议都是应用层协议,它们的物理层有所不同。
Modbus-RTU和Modbus-ASCII协议是基于串行链路的,其物理层可以是RS232C或者RS485;Modbus-TCP的物理层是以太网的。
Modbus报文的基本结构,称为"协议数据单元",简称"PDU",它由"功能码+数据"组成,这个对Modbus所有三种协议都是相同的,与使用的物理层无关。在实际通信时,要将协议数据单元映射到物理网络上,这就形成了"应用数据单元",简称"ADU"。
对于Modbus-RTU和ASCII协议,其应用数据单元是在协议数据单元的基础上,前面加上从站地址,后面加上校验码;对于Modbus-TCP协议,其应用数据单元是在协议数据单元的基础上加上MBAP头。MBAP是英文"Modbus Apllication"的缩写,它由7个字节组成,包括了:传输标识符、协议标识符、数据长度及单元标识符等内容。
目前Modbus协议多在工业自动化、楼宇自动化、电力系统、交通运输等领域应用,虽然Modbus协议有所不同,但其实许多厂家的PLC产品都支持Modbus通信,实现互通。
3.设计一款 12路车载超声波雷达,采用 stm32F103+HC-SR04超声波模块,对外提供RS485和Modbus协议
硬件设计:
STM32F103微控制器:选择了一个低成本的微控制器,具有足够的性能和外设,适合应用于车载超声波雷达。
HC-SR04超声波模块:通常工作在5V电压下,需要适当的电源和时序控制。
多通道信号采集:为了处理12个超声波传感器的输入,需要考虑使用多路AD转换器或选择适当的外部模拟前端。
电源管理:提供稳定的电源以满足系统的需求,需要考虑到车载环境中的电压变化和干扰。
嵌入式软件开发:
驱动程序开发:编写适配HC-SR04模块、多通道信号采集和STM32F103微控制器的驱动程序。
数据处理:进行传感器数据的有效处理,包括距离计算和障碍物检测。
可调参数:设计用于调整雷达性能参数的用户界面或控制指令。
通信协议:
RS485接口:实现RS485物理层、数据链路层和协议层的封装。
Modbus协议:确保与其他设备的兼容性,包括定义好寻址方式、数据帧格式和功能码。
系统可靠性和稳定性:
环境适应性:考虑车载环境下的温度、湿度、震动等因素对系统稳定性的影响。
安全性:确保雷达能够准确快速地检测到周围的障碍物,以提供准确的驾驶辅助。
整体来说,以上是设计12路车载超声波雷达的关键方面。设计需要仔细考虑硬件和软件的整合,特别是在车载环境下,系统稳定性和可靠性尤为关键。
参考链接:https://blog.csdn.net/u012513463/article/details/126045385


























 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









