









功能简介
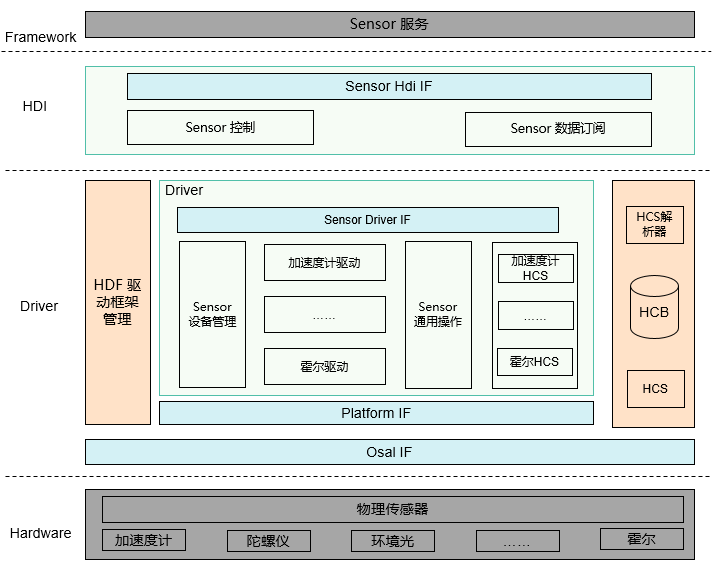
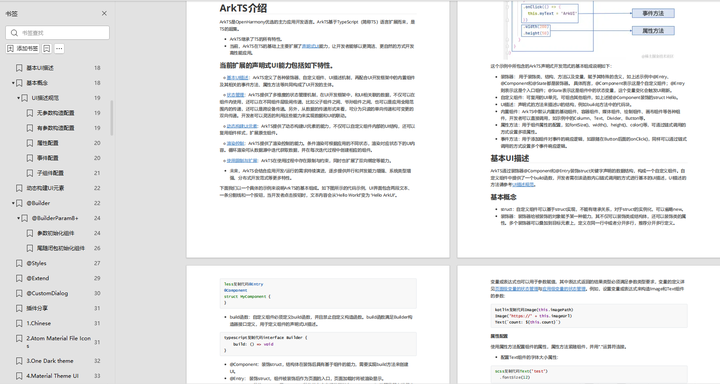
Sensor驱动模型屏蔽硬件器件差异,为上层Sensor服务系统提供稳定的Sensor基础能力接口,包括Sensor列表查询、Sensor启停、Sensor订阅及取消订阅,Sensor参数配置等功能。Sensor设备驱动的开发是基于HDF驱动框架基础上,结合操作系统适配层(OSAL)和平台驱动接口(比如I2C/SPI/UART总线等平台资源)能力,屏蔽不同操作系统和平台总线资源差异,实现Sensor驱动“一次开发,多系统部署”的目标。Sensor驱动模型如图1所示。
图 1 Sensor驱动模型图
基本概念
目前根据sensorId将Sensor分为医学类Sensor、传统类Sensor两种。
-
医学类Sensor:已订阅的sensorId枚举值在128-160范围的为医学类Sensor。
-
传统类Sensor:已订阅的sensorId枚举值不在128-160范围的为传统类Sensor。
运作机制
通过介绍Sensor驱动模型的加载以及运行流程,对模型内部关键组件以及关联组件之间的关系进行了划分,整体加载流程如图2所示:
图 2 Sensor驱动运行图
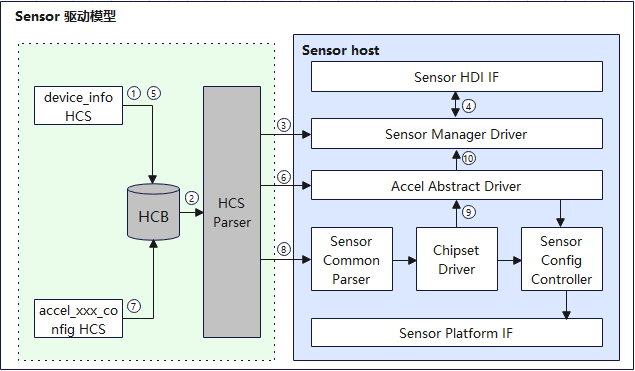
Sensor驱动模型以标准系统RK3568产品中的加速度传感器驱动为例,介绍整个驱动加载及运行流程:
- 从device_info.hcs配置文件中的Sensor Host读取到Sensor设备管理配置信息。
- HDF配置框架从HCB数据库中解析Sensor设备管理配置信息,并关联对应设备驱动。
- 加载并初始化Sensor设备管理驱动。
- Sensor设备管理驱动向HDI发布Sensor基础能力接口。
- 从device_info.hcs配置文件中的Sensor Host读取到加速度传感器驱动配置信息。
- 加载加速度传感器抽象驱动,调用初始化接口,完成Sensor器件的驱动资源分配和数据处理队列的创建。
- 从accel_xxx_config.hcs配置文件中读取到加速度传感器差异化驱动配置和私有化配置信息。
- 加速度传感器芯片差异化驱动,调用通用配置解析接口,完成器件属性信息解析,器件寄存器解析。
- 加速度传感器芯片差异化驱动完成器件的探测,并分配加速度传感器配置资源和加速度传感器差异化接口注册。
- 加速度传感器成功探测到器件之后,加速度传感器芯片差异化驱动通知加速度传感器抽象驱动,注册加速度传感器设备到Sensor设备管理中。
开发指导
场景介绍
- 通过重力和陀螺仪传感器数据,能感知设备倾斜和旋转量,提高用户在游戏场景中的体验。
- 通过接近光传感器数据,感知距离遮挡物的距离,使设备能够自动亮灭屏,达到防误触目的。例如,手机通话时,如屏幕距离人脸过近,则自动关闭屏幕,防止误触的同时降低功耗。
- 通过气压计传感器数据,可以准确的判断设备当前所处的海拔。
- 通过环境光传感器数据,设备能够实现背光自动调节。
- 通过霍尔传感器数据,设备可以实现皮套功能,皮套合上,手机上开一个小窗口,可降低功耗。
接口说明
Sensor驱动模型对外开放的API接口能力如下:
- 提供Sensor HDI(Hardware Device Interface)能力接口,简化服务开发。
- 提供Sensor驱动模型能力接口:
- 依赖HDF驱动框架实现Sensor器件驱动的加载、器件探测、注册和去注册等能力。
- 提供同一类型Sensor器件驱动归一接口、寄存器配置解析操作接口、总线访问抽象接口和平台抽象接口。
- 提供开发者实现的能力接口:依赖HDF驱动框架的HCS(HDF Configuration Source)配置管理,根据同类型Sensor差异化配置,实现Sensor器件参数序列化配置和器件部分操作接口,简化Sensor器件驱动开发。
Sensor驱动模型对外开放的API接口能力的具体实现请参考:
表 1 Sensor驱动模型对外API接口功能介绍
注:以下接口列举的为C接口,接口声明见文件/drivers/peripheral/sensor/interfaces/include。
| 接口名 | 功能描述 |
|---|---|
| int32_t GetAllSensors(struct SensorInformation **sensorInfo, int32_t *count) | 获取系统中注册的所有传感器信息,一组完整传感器信息包括传感器名字、设备厂商、固件版本号、硬件版本号、传感器类型编号、传感器标识、最大量程、精度、功耗。 |
| int32_t Enable(int32_t sensorId) | 使能指定传感器设备,只有数据订阅者使能传感器后,才能获取订阅的传感器数据。 |
| int32_t Disable(int32_t sensorId) | 去使能指定传感器设备。 |
| int32_t SetBatch(int32_t sensorId, int64_t samplingInterval, int64_t reportInterval) | 设置指定传感器的数据采样间隔和数据上报间隔。 |
| int32_t SetMode(int32_t sensorId, int32_t mode) | 设置指定传感器的工作模式,不同的工作模式,上报数据方式不同。 |
| int32_t SetOption(int32_t sensorId, uint32_t option) | 设置指定传感器量程,精度等可选配置。 |
| int32_t Register(int32_t groupId, RecordDataCallback cb) | 订阅者根据不同groupId注册传感器数据回调函数,系统会将获取到的传感器数据上报给订阅者。 |
| int32_t Unregister(int32_t groupId, RecordDataCallback cb) | 订阅者根据groupId和回调函数注销对应订阅者的传感器数据回调函数。 |
Sensor驱动模型对驱动开发者开放的功能接口,驱动开发者无需实现,直接使用,请参考:
表2 Sensor驱动模型对驱动开发者开放的功能接口列表
| 接口名 | 功能描述 |
|---|---|
| int32_t AddSensorDevice(const struct SensorDeviceInfo *deviceInfo) | 添加当前类型的传感器设备到传感器设备管理。 |
| int32_t DeleteSensorDevice(const struct SensorBasicInfo *sensorBaseInfo) | 删除传感器设备管理里指定的传感器设备。 |
| int32_t ReportSensorEvent(const struct SensorReportEvent *events) | 上报指定类型传感器的数据到用户侧。 |
| int32_t ReadSensor(struct SensorBusCfg *busCfg, uint16_t regAddr, uint8_t *data, uint16_t dataLen) | 按照配置的总线方式,读取传感器寄存器配置数据。 |
| int32_t WriteSensor(struct SensorBusCfg *busCfg, uint8_t *writeData, uint16_t len) | 按照配置的总线方式,将传感器配置数据写入寄存器。 |
| int32_t SetSensorRegCfgArray(struct SensorBusCfg *busCfg, const struct SensorRegCfgGroupNode *group); | 根据传感器总线类型信息,下发寄存器分组配置。 |
| int32_t GetSensorBaseConfigData(const struct DeviceResourceNode *node, struct SensorCfgData *config) | 根据传感器设备HCS资源配置,获取传感器信息,总线配置信息,属性配置等基本配置信息,并初始化对应的基本配置数据结构体。 |
| int32_t ParseSensorRegConfig(struct SensorCfgData *config) | 根据传感器设备HCS资源配置,解析寄存器分组信息,并初始化配置数据结构体。 |
| void ReleaseSensorAllRegConfig(struct SensorCfgData *config) | 释放传感器配置数据结构体里分配的资源。 |
| int32_t GetSensorBusHandle(struct SensorBusCfg *busCfg) | 获取传感器总线句柄信息。 |
| int32_t ReleaseSensorBusHandle(struct SensorBusCfg *busCfg) | 释放传感器句柄信息。 |
Sensor驱动模型要求驱动开发者实现的接口功能,请参考:
表 3 Sensor驱动模型要求驱动开发者实现的接口列表
| 接口名 | 功能描述 |
|---|---|
| int32_t init(void) | 传感器设备探测成功后,需要对传感器设备初始化配置。 |
| int32_t Enable(void) | 根据当前传感器设备的HCS配置,下发传感器设备使能操作组的寄存器配置。 |
| int32_t Disable(void) | 根据当前传感器设备的HCS配置,下发传感器设备去使能操作组的寄存器配置。 |
| int32_t SetBatch(int64_t samplingInterval, int64_t reportInterval) | 根据数据采样率和数据上报间隔,配置当前传感器设备的数据上报线程处理时间。 |
| int32_t SetMode(int32_t mode) | 配置当前传感器设备数据上报方式。 |
| int32_t SetOption(uint32_t option) | 根据可选配置、下发量程和精度等寄存器配置。 |
| void ReadSensorData(void) | 读取传感器数据。 |
接口实现参考开发步骤章节。
开发步骤
基于HDF驱动框架,按照驱动Driver Entry程序,以加速度传感器驱动为例,介绍传感器驱动的开发。传感器的驱动开发包括抽象驱动开发和差异化驱动开发两部分。传感器的抽象驱动开发包括同一个传感器id中不同器件的公共接口实现;传感器的差异化驱动开发包括不同器件差异化接口的实现。
-
开发加速度传感器抽象驱动。
-
加速度传感器抽象驱动在Sensor Host中的配置信息,代码实现路径如下:vendor\hihope\rk3568\hdf_config\khdf\device_info\device_info.hcs。
具体代码实现如下:
/* 加速度计传感器设备HCS配置 */ device_sensor_accel :: device { device0 :: deviceNode { policy = 1; // 驱动服务发布的策略 priority = 110; // 驱动启动优先级(0-200),值越大优先级越低,建议配置为100,优先级相同则不保证device的加载顺序 preload = 0; // 驱动按需加载字段,0表示加载,2表示不加载 permission = 0664; // 驱动创建设备节点权限 moduleName = "HDF_SENSOR_ACCEL"; // 驱动名称,该字段的值必须和驱动入口结构的moduleName值一致 serviceName = "sensor_accel"; // 驱动对外发布服务的名称,必须唯一 deviceMatchAttr = "hdf_sensor_accel_driver"; // 驱动私有数据匹配的关键字,必须和驱动私有数据配置表中的match_attr值相等 } } -
加速度传感器抽象驱动代码实现路径为:drivers\hdf_core\framework\model\sensor\driver\accel\sensor_accel_driver.c。
-
加速度传感器抽象驱动对应的HdfDriverEntry对象,其中,Driver Entry入口函数定义如下:
struct HdfDriverEntry g_sensorAccelDevEntry = { .moduleVersion = 1, // 加速度计传感器模块版本号 .moduleName = "HDF_SENSOR_ACCEL", // 加速度计传感器模块名,要与device_info.hcs文件里的加速度计moduleName字段值一样 .Bind = BindAccelDriver, // 加速度计传感器绑定函数 .Init = InitAccelDriver, // 加速度计传感器初始化函数 .Release = ReleaseAccelDriver, // 加速度计传感器资源释放函数 }; /* 调用HDF_INIT将驱动入口注册到HDF框架中。在加载驱动时HDF框架会先调用Bind函数,再调用Init函数加载该驱动。当Init调用异常时,HDF框架会调用Release释放驱动资源并退出 */ HDF_INIT(g_sensorAccelDevEntry); -
加速度传感器抽象驱动Bind接口实现如下:
int32_t AccelBindDriver(struct HdfDeviceObject *device) { CHECK_NULL_PTR_RETURN_VALUE(device, HDF_ERR_INVALID_PARAM); struct AccelDrvData *drvData = (struct AccelDrvData *)OsalMemCalloc(sizeof(*drvData)); if (drvData == NULL) { HDF_LOGE("%s: Malloc accel drv data fail!", __func__); return HDF_ERR_MALLOC_FAIL; } drvData->ioService.Dispatch = DispatchAccel; drvData->device = device; device->service = &drvData->ioService; g_accelDrvData = drvData; return HDF_SUCCESS; } -
加速度传感器抽象驱动Init接口实现如下:
int32_t AccelInitDriver(struct HdfDeviceObject *device) { CHECK_NULL_PTR_RETURN_VALUE(device, HDF_ERR_INVALID_PARAM); struct AccelDrvData *drvData = (struct AccelDrvData *)device->service; CHECK_NULL_PTR_RETURN_VALUE(drvData, HDF_ERR_INVALID_PARAM); /* 工作队列资源初始化 */ if (InitAccelData(drvData) != HDF_SUCCESS) { HDF_LOGE("%s: Init accel config failed", __func__); return HDF_FAILURE; } /* 分配加速度配置信息资源 */ drvData->accelCfg = (struct SensorCfgData *)OsalMemCalloc(sizeof(*drvData->accelCfg)); if (drvData->accelCfg == NULL) { HDF_LOGE("%s: Malloc accel config data failed", __func__); return HDF_FAILURE; } /* 注册寄存器分组信息 */ drvData->accelCfg->regCfgGroup = &g_regCfgGroup[0]; drvData->cb = NULL; HDF_LOGI("%s: Init accel driver success", __func__); return HDF_SUCCESS; } -
加速度抽象传感器驱动Release接口在驱动卸载或者Init执行失败时,会调用此接口释放资源,具体实现如下:
void AccelReleaseDriver(struct HdfDeviceObject *device) { CHECK_NULL_PTR_RETURN(device); struct AccelDrvData *drvData = (struct AccelDrvData *)device->service; CHECK_NULL_PTR_RETURN(drvData); /* 器件在位,释放已分配资源 */ if (drvData->detectFlag && drvData->accelCfg != NULL) { AccelReleaseCfgData(drvData->accelCfg); } OsalMemFree(drvData->accelCfg); drvData->accelCfg = NULL; /* 器件在位,销毁工作队列资源 */ HdfWorkDestroy(&drvData->accelWork); HdfWorkQueueDestroy(&drvData->accelWorkQueue); OsalMemFree(drvData); } -
加速度传感器抽象驱动内部接口代码实现如下:
-
提供给差异化驱动的初始化接口,完成加速度传感器器件的基本配置信息解析(加速度传感器信息,加速度传感器总线配置,加速度传感器器件探测寄存器配置),器件探测,器件寄存器解析,具体实现如下:
static int32_t InitAccelAfterDetected(struct SensorCfgData *config) { struct SensorDeviceInfo deviceInfo; CHECK_NULL_PTR_RETURN_VALUE(config, HDF_ERR_INVALID_PARAM); /* 初始化加速度计接口函数 */ if (InitAccelOps(config, &deviceInfo) != HDF_SUCCESS) { HDF_LOGE("%s: Init accel ops failed", __func__); return HDF_FAILURE; } /* 注册加速度计器件到传感器设备管理模块 */ if (AddSensorDevice(&deviceInfo) != HDF_SUCCESS) { HDF_LOGE("%s: Add accel device failed", __func__); return HDF_FAILURE; } /* 器件寄存器解析 */ if (ParseSensorDirection(config) != HDF_SUCCESS) { HDF_LOGE("%s: Parse accel direction failed", __func__); (void)DeleteSensorDevice(&config->sensorInfo); return HDF_FAILURE; } if (ParseSensorRegConfig(config) != HDF_SUCCESS) { HDF_LOGE("%s: Parse sensor register failed", __func__); (void)DeleteSensorDevice(&config->sensorInfo); ReleaseSensorAllRegConfig(config); ReleaseSensorDirectionConfig(config); return HDF_FAILURE; } return HDF_SUCCESS; } struct SensorCfgData *AccelCreateCfgData(const struct DeviceResourceNode *node) { struct AccelDrvData *drvData = AccelGetDrvData(); /* 如果器件不在位,返回进行下个器件探测 */ if (drvData == NULL || node == NULL) { HDF_LOGE("%s: Accel node pointer NULL", __func__); return NULL; } if (drvData->detectFlag) { HDF_LOGE("%s: Accel sensor have detected", __func__); return NULL; } if (drvData->accelCfg == NULL) { HDF_LOGE("%s: Accel accelCfg pointer NULL", __func__); return NULL; } /* 设备基本配置信息解析 */ if (GetSensorBaseConfigData(node, drvData->accelCfg) != HDF_SUCCESS) { HDF_LOGE("%s: Get sensor base config failed", __func__); goto BASE_CONFIG_EXIT; } /* 如果器件不在位(存在器件ID的情况),返回进行下个器件探测 */ if (DetectSensorDevice(drvData->accelCfg) != HDF_SUCCESS) { HDF_LOGI("%s: Accel sensor detect device no exist", __func__); drvData->detectFlag = false; goto BASE_CONFIG_EXIT; } /* 器件寄存器解析 */ drvData->detectFlag = true; if (InitAccelAfterDetected(drvData->accelCfg) != HDF_SUCCESS) { HDF_LOGE("%s: Accel sensor detect device no exist", __func__); goto INIT_EXIT; } return drvData->accelCfg; INIT_EXIT: (void)ReleaseSensorBusHandle(&drvData->accelCfg->busCfg); BASE_CONFIG_EXIT: drvData->accelCfg->root = NULL; (void)memset_s(&drvData->accelCfg->sensorInfo, sizeof(struct SensorBasicInfo), 0, sizeof(struct SensorBasicInfo)); (void)memset_s(&drvData->accelCfg->busCfg, sizeof(struct SensorBusCfg), 0, sizeof(struct SensorBusCfg)); (void)memset_s(&drvData->accelCfg->sensorAttr, sizeof(struct SensorAttr), 0, sizeof(struct SensorAttr)); return drvData->accelCfg; } -
Enable接口的代码实现如下:
static int32_t SetAccelEnable(void) { int32_t ret; struct AccelDrvData *drvData = AccelGetDrvData(); CHECK_NULL_PTR_RETURN_VALUE(drvData, HDF_ERR_INVALID_PARAM); CHECK_NULL_PTR_RETURN_VALUE(drvData->accelCfg, HDF_ERR_INVALID_PARAM); if (drvData->enable) { HDF_LOGE("%s: Accel sensor is enabled", __func__); return HDF_SUCCESS; } /* 设置寄存器 */ ret = SetSensorRegCfgArray(&drvData->accelCfg->busCfg, drvData->accelCfg->regCfgGroup[SENSOR_ENABLE_GROUP]); if (ret != HDF_SUCCESS) { HDF_LOGE("%s: Accel sensor enable config failed", __func__); return ret; } /* 创建定时器 */ ret = OsalTimerCreate(&drvData->accelTimer, SENSOR_TIMER_MIN_TIME, AccelTimerEntry, (uintptr_t)drvData); if (ret != HDF_SUCCESS) { HDF_LOGE("%s: Accel create timer failed[%d]", __func__, ret); return ret; } /* 开启定时器进行数据上报 */ ret = OsalTimerStartLoop(&drvData->accelTimer); if (ret != HDF_SUCCESS) { HDF_LOGE("%s: Accel start timer failed[%d]", __func__, ret); return ret; } drvData->enable = true; return HDF_SUCCESS; } -
Disable接口的代码实现如下:
static int32_t SetAccelDisable(void) { int32_t ret; struct AccelDrvData *drvData = AccelGetDrvData(); CHECK_NULL_PTR_RETURN_VALUE(drvData, HDF_ERR_INVALID_PARAM); CHECK_NULL_PTR_RETURN_VALUE(drvData->accelCfg, HDF_ERR_INVALID_PARAM); if (!drvData->enable) { HDF_LOGE("%s: Accel sensor had disable", __func__); return HDF_SUCCESS; } /* 设置寄存器 */ ret = SetSensorRegCfgArray(&drvData->accelCfg->busCfg, drvData->accelCfg->regCfgGroup[SENSOR_DISABLE_GROUP]); if (ret != HDF_SUCCESS) { HDF_LOGE("%s: Accel sensor disable config failed", __func__); return ret; } /* 删除定时器 */ ret = OsalTimerDelete(&drvData->accelTimer); if (ret != HDF_SUCCESS) { HDF_LOGE("%s: Accel delete timer failed", __func__); return ret; } drvData->enable = false; return HDF_SUCCESS; } -
SetBatch接口的代码实现如下:
static int32_t SetAccelBatch(int64_t samplingInterval, int64_t interval) { (void)interval; struct AccelDrvData *drvData = NULL; drvData = AccelGetDrvData(); CHECK_NULL_PTR_RETURN_VALUE(drvData, HDF_ERR_INVALID_PARAM); /* 给定时器设置采样率 */ drvData->interval = samplingInterval; return HDF_SUCCESS; } -
SetMode接口的代码实现如下:
static int32_t SetAccelMode(int32_t mode) { if (mode <= SENSOR_WORK_MODE_DEFAULT || mode >= SENSOR_WORK_MODE_MAX) { HDF_LOGE("%s: The current mode is not supported", __func__); return HDF_FAILURE; } return HDF_SUCCESS; } -
SetOption接口的代码实现如下:
static int32_t SetAccelOption(uint32_t option) { (void)option; return HDF_SUCCESS; }
-
-
-
-
开发加速度传感器差异化驱动。
-
加速度传感器差异化驱动在Sensor Host中的配置信息,代码实现路径如下:vendor\hihope\rk3568\hdf_config\khdf\device_info\device_info.hcs。
具体代码实现如下:
device_sensor_mxc6655xa :: device { device0 :: deviceNode { policy = 1; // policy字段是驱动服务发布的策略 priority = 120; // 驱动启动优先级(0-200),值越大优先级越低,建议配置为100,优先级相同则不保证device的加载顺序 preload = 0; // 驱动按需加载字段,0表示加载,2表示不加载 permission = 0664; // 驱动创建设备节点权限 moduleName = "HDF_SENSOR_ACCEL_MXC6655XA"; // 驱动名称,该字段的值必须和驱动入口结构的moduleName值一致 serviceName = "hdf_accel_mxc6655xa"; // 加速度mxc6655xa对外发布服务的名称,必须唯一 deviceMatchAttr = "hdf_sensor_accel_mxc6655xa_driver"; // 加速度差异化驱动私有数据匹配的关键字,必须和驱动私有数据配置表中的match_attr值相等 } } -
加速度传感器差异化驱动私有HCS配置:
-
代码实现路径:vendor\hihope\rk3568\hdf_config\khdf\sensor\accel\mxc6655xa_config.hcs。
-
具体代码实现如下:
#include "../sensor_common.hcs" root { accel_mxc6655xa_chip_config : sensorConfig { match_attr = "hdf_sensor_accel_mxc6655xa_driver"; sensorInfo :: sensorDeviceInfo { sensorName = "accelerometer"; vendorName = "memsi_mxc6655xa"; // max string length is 16 bytes sensorTypeId = 1; // enum SensorTypeTag sensorId = 1; // user define sensor id power = 230; minDelay = 5000000; // nanosecond maxDelay = 200000000; // nanosecond } sensorBusConfig :: sensorBusInfo { busType = 0; // 0:i2c 1:spi busNum = 5; busAddr = 0x15; regWidth = 1; // 1byte } sensorIdAttr :: sensorIdInfo { chipName = "mxc6655xa"; chipIdRegister = 0x0f; chipIdValue = 0x05; // 根据器件ID寄存器,读取的值,或查看相关芯片datasheet手册确认该值 } sensorDirection { direction = 1; // chip direction range of value:0-7 /* <sign> 1:negative 0:positive <map> 0:AXIS_X 1:AXIS_Y 2:AXIS_Z */ /* sign[AXIS_X], sign[AXIS_Y], sign[AXIS_Z], map[AXIS_X], map[AXIS_Y], map[AXIS_Z] */ convert = [ 0, 0, 0, 0, 1, 2, 1, 0, 0, 1, 0, 2, 0, 0, 1, 0, 1, 2, 0, 1, 0, 1, 0, 2, 1, 0, 1, 0, 1, 2, 0, 0, 1, 1, 0, 2, 0, 1, 1, 0, 1, 2, 1, 1, 1, 1, 0, 2 ]; } sensorRegConfig { /* regAddr: register address value: config register value len: size of value mask: mask of value delay: config register delay time (ms) opsType: enum SensorOpsType 0-none 1-read 2-write 3-read_check 4-update_bit calType: enum SensorBitCalType 0-none 1-set 2-revert 3-xor 4-left shift 5-right shift shiftNum: shift bits debug: 0-no debug 1-debug save: 0-no save 1-save */ /* regAddr, value, mask, len, delay, opsType, calType, shiftNum, debug, save */ initSeqConfig = [ 0x7e, 0xb6, 0xff, 1, 5, 2, 0, 0, 0, 0, 0x7e, 0x10, 0xff, 1, 5, 2, 0, 0, 0, 0 ]; enableSeqConfig = [ 0x7e, 0x11, 0xff, 1, 5, 2, 0, 0, 0, 0, 0x41, 0x03, 0xff, 1, 0, 2, 0, 0, 0, 0, 0x40, 0x08, 0xff, 1, 0, 2, 0, 0, 0, 0 ]; disableSeqConfig = [ 0x7e, 0x10, 0xff, 1, 5, 2, 0, 0, 0, 0 ]; } } }
-
-
加速度差异化驱动的代码实现路径:drivers\peripheral\sensor\chipset\accel\accel_mxc6655xa.c
-
加速度传感器差异化驱动对应的HdfDriverEntry对象,其中,Driver Entry入口函数定义如下:
/* 注册加速度mxc6655xa传感器入口数据结构体对象 */ struct HdfDriverEntry g_accelMxc6655xaDevEntry = { .moduleVersion = 1, // 加速度mxc6655xa传感器模块版本号 .moduleName = "HDF_SENSOR_ACCEL_MXC6655XA", // 加速度mxc6655xa传感器模块名,要与device_info.hcs文件里加速度mxc6655xa传感器moduleName字段值一致 .Bind = Mxc6655xaBindDriver, // 加速度mxc6655xa传感器的绑定函数 .Init = Mxc6655xaInitDriver, // 加速度mxc6655xa传感器的初始化函数 .Release = Mxc6655xaReleaseDriver, // 加速度mxc6655xa传感器资源释放函数 }; /* 调用HDF_INIT将驱动入口注册到HDF框架中,在加载驱动时HDF框架会先调用Bind函数,再调用Init函数加载该驱动,当Init调用异常时,HDF框架会调用Release释放驱动资源并退出 */ HDF_INIT(g_accelMxc6655xaDevEntry); -
加速度传感器差异化驱动Bind接口实现如下:
int32_t Mxc6655xaBindDriver(struct HdfDeviceObject *device) { CHECK_NULL_PTR_RETURN_VALUE(device, HDF_ERR_INVALID_PARAM); struct Mxc6655xaDrvData *drvData = (struct Mxc6655xaDrvData *)OsalMemCalloc(sizeof(*drvData)); if (drvData == NULL) { HDF_LOGE("%s: Malloc MXC6655XA drv data fail", __func__); return HDF_ERR_MALLOC_FAIL; } drvData->ioService.Dispatch = DispatchMXC6655xa; drvData->device = device; device->service = &drvData->ioService; g_mxc6655xaDrvData = drvData; return HDF_SUCCESS; } -
加速度传感器差异化驱动Init接口实现如下:
int32_t Mxc6655xaInitDriver(struct HdfDeviceObject *device) { int32_t ret; struct AccelOpsCall ops; CHECK_NULL_PTR_RETURN_VALUE(device, HDF_ERR_INVALID_PARAM); struct Mxc6655xaDrvData *drvData = (struct Mxc6655xaDrvData *)device->service; CHECK_NULL_PTR_RETURN_VALUE(drvData, HDF_ERR_INVALID_PARAM); drvData->sensorCfg = AccelCreateCfgData(device->property); if (drvData->sensorCfg == NULL || drvData->sensorCfg->root == NULL) { HDF_LOGD("%s: Creating accelcfg failed because detection failed", __func__); return HDF_ERR_NOT_SUPPORT; } ops.Init = NULL; ops.ReadData = ReadMxc6655xaData; ret = AccelRegisterChipOps(&ops); if (ret != HDF_SUCCESS) { HDF_LOGE("%s: Register MXC6655XA accel failed", __func__); return HDF_FAILURE; } ret = InitMxc6655xa(drvData->sensorCfg); if (ret != HDF_SUCCESS) { HDF_LOGE("%s: Init MXC6655XA accel failed", __func__); return HDF_FAILURE; } return HDF_SUCCESS; } -
加速度传感器差异化驱动Release接口实现如下:
void Mxc6655xaReleaseDriver(struct HdfDeviceObject *device) { CHECK_NULL_PTR_RETURN(device); struct Mxc6655xaDrvData *drvData = (struct Mxc6655xaDrvData *)device->service; CHECK_NULL_PTR_RETURN(drvData); if (drvData->sensorCfg != NULL) { AccelReleaseCfgData(drvData->sensorCfg); drvData->sensorCfg = NULL; } OsalMemFree(drvData); } -
加速度传感器差异化驱动内部接口实现。
需要开发者实现的ReadMxc6655xaData接口函数,在 Mxc6655xaInitDriver函数里面注册此函数,具体实现如下:
static int32_t ReadMxc6655xaRawData(struct SensorCfgData *data, struct AccelData *rawData, uint64_t *timestamp) { uint8_t status = 0; uint8_t reg[ACCEL_AXIS_BUTT]; OsalTimespec time; int32_t x; int32_t y; int32_t z; (void)memset_s(&time, sizeof(time), 0, sizeof(time)); (void)memset_s(reg, sizeof(reg), 0, sizeof(reg)); CHECK_NULL_PTR_RETURN_VALUE(data, HDF_ERR_INVALID_PARAM); if (OsalGetTime(&time) != HDF_SUCCESS) { HDF_LOGE("%s: Get time failed", __func__); return HDF_FAILURE; } *timestamp = time.sec * SENSOR_SECOND_CONVERT_NANOSECOND + time.usec * SENSOR_CONVERT_UNIT; /* unit nanosecond */ int32_t ret = ReadSensor(&data->busCfg, MXC6655XA_STATUS_ADDR, &status, sizeof(uint8_t)); if (ret != HDF_SUCCESS) { HDF_LOGE("%s: data status [%u] ret [%d]", __func__, status, ret); return HDF_FAILURE; } ret = ReadSensor(&data->busCfg, MXC6655XA_ACCEL_X_LSB_ADDR, ®[ACCEL_X_AXIS_LSB], sizeof(uint8_t)); CHECK_PARSER_RESULT_RETURN_VALUE(ret, "read data"); ret = ReadSensor(&data->busCfg, MXC6655XA_ACCEL_X_MSB_ADDR, ®[ACCEL_X_AXIS_MSB], sizeof(uint8_t)); CHECK_PARSER_RESULT_RETURN_VALUE(ret, "read data"); ret = ReadSensor(&data->busCfg, MXC6655XA_ACCEL_Y_LSB_ADDR, ®[ACCEL_Y_AXIS_LSB], sizeof(uint8_t)); CHECK_PARSER_RESULT_RETURN_VALUE(ret, "read data"); ret = ReadSensor(&data->busCfg, MXC6655XA_ACCEL_Y_MSB_ADDR, ®[ACCEL_Y_AXIS_MSB], sizeof(uint8_t)); CHECK_PARSER_RESULT_RETURN_VALUE(ret, "read data"); ret = ReadSensor(&data->busCfg, MXC6655XA_ACCEL_Z_LSB_ADDR, ®[ACCEL_Z_AXIS_LSB], sizeof(uint8_t)); CHECK_PARSER_RESULT_RETURN_VALUE(ret, "read data"); ret = ReadSensor(&data->busCfg, MXC6655XA_ACCEL_Z_MSB_ADDR, ®[ACCEL_Z_AXIS_MSB], sizeof(uint8_t)); CHECK_PARSER_RESULT_RETURN_VALUE(ret, "read data"); x = SensorConvertData(reg[ACCEL_X_AXIS_MSB], reg[ACCEL_X_AXIS_LSB]); y = SensorConvertData(reg[ACCEL_Y_AXIS_MSB], reg[ACCEL_Y_AXIS_LSB]); z = SensorConvertData(reg[ACCEL_Z_AXIS_MSB], reg[ACCEL_Z_AXIS_LSB]); rawData->x = x; rawData->y = y; rawData->z = z; return HDF_SUCCESS; } /* 读取加速度的event数据,在 Mxc6655xaInitDriver函数里面注册此函数,将数据传给加速度抽象驱动 */ int32_t ReadMxc6655xaData(struct SensorCfgData *cfg, struct SensorReportEvent *event) { int32_t ret; struct AccelData rawData = { 0, 0, 0 }; static int32_t tmp[ACCEL_AXIS_NUM]; CHECK_NULL_PTR_RETURN_VALUE(cfg, HDF_ERR_INVALID_PARAM); CHECK_NULL_PTR_RETURN_VALUE(event, HDF_ERR_INVALID_PARAM); ret = ReadMxc6655xaRawData(cfg, &rawData, &event->timestamp); if (ret != HDF_SUCCESS) { HDF_LOGE("%s: MXC6655XA read raw data failed", __func__); return HDF_FAILURE; } event->sensorId = SENSOR_TAG_ACCELEROMETER; event->option = 0; event->mode = SENSOR_WORK_MODE_REALTIME; rawData.x = rawData.x * MXC6655XA_ACC_SENSITIVITY_2G; rawData.y = rawData.y * MXC6655XA_ACC_SENSITIVITY_2G; rawData.z = rawData.z * MXC6655XA_ACC_SENSITIVITY_2G; tmp[ACCEL_X_AXIS] = (rawData.x * SENSOR_CONVERT_UNIT) / SENSOR_CONVERT_UNIT; tmp[ACCEL_Y_AXIS] = (rawData.y * SENSOR_CONVERT_UNIT) / SENSOR_CONVERT_UNIT; tmp[ACCEL_Z_AXIS] = (rawData.z * SENSOR_CONVERT_UNIT) / SENSOR_CONVERT_UNIT; ret = SensorRawDataToRemapData(cfg->direction, tmp, sizeof(tmp) / sizeof(tmp[0])); if (ret != HDF_SUCCESS) { HDF_LOGE("%s: MXC6655XA convert raw data failed", __func__); return HDF_FAILURE; } event->dataLen = sizeof(tmp); event->data = (uint8_t *)&tmp; return ret; }
-
-
调测验证
驱动开发完成后,在传感器单元测试里面开发自测试用例,验证驱动基本功能。测试环境采用开发者自测试平台。
-
参考测试代码如下:
#include <cmath> #include <cstdio> #include <unistd.h> #include <gtest/gtest.h> #include <securec.h> #include "hdf_base.h" #include "osal_mem.h" #include "osal_time.h" #include "sensor_if.h" #include "sensor_type.h" using namespace testing::ext; const struct SensorInterface *g_sensorDev = nullptr; /* 创建回调函数 */ static int32_t SensorDataCallback(const struct SensorEvents *event) { if (event == NULL) { return HDF_FAILURE; } float *data = (float*)event->data; printf("time [%lld] sensor id [%d] x-[%f] y-[%f] z-[%f]\n\r", event->timestamp, event->sensorId, (*data), *(data + 1), *(data + 2)); return HDF_SUCCESS; } class HdfSensorTest : public testing::Test { public: static void SetUpTestCase(); static void TearDownTestCase(); void SetUp(); void TearDown(); }; /* 用例执行前,初始化传感器接口实例 */ void HdfSensorTest::SetUpTestCase() { g_sensorDev = NewSensorInterfaceInstance(); if (g_sensorDev == nullptr) { printf("test sensor get module instance failed\n\r"); } } /* 用例资源释放 */ void HdfSensorTest::TearDownTestCase() { if (g_sensorDev != nullptr) { FreeSensorInterfaceInstance(); g_sensorDev = nullptr; } } void HdfSensorTest::SetUp() { } void HdfSensorTest::TearDown() { } HWTEST_F(HdfSensorTest,TestAccelDriver_001, TestSize.Level0) { int ret; struct SensorInformation *sensorInfo = NULL; int32_t count = 0; int32_t sensorInterval = 200000000; /* 数据采样率设置200毫秒,单位纳秒 */ int32_t reportInterval = 400000000; /* 2.订阅者注册传感器数据回调处理函数 */ ret = g_sensorDev->Register(TRADITIONAL_SENSOR_TYPE, SensorDataCallback); if (ret != 0) { return; } printf("Register success\n"); /* 3.获取设备支持的Sensor列表 */ ret = g_sensorDev->GetAllSensors(&sensorInfo, &count); if (ret != 0) { return; } printf("GetAllSensors count: %d\n", count); for (int i = 0; i < count; i++) { printf("sensor [%d]: sensorName: %s, vendorName: %s, sensorTypeId: %d, sensorId: %d\n", i, sensorInfo[i].sensorName, sensorInfo[i].vendorName, sensorInfo[i].sensorTypeId, sensorInfo[i].sensorId); } for (int i = 0; i < count; i++) { /* 4.设置传感器采样率 */ ret = g_sensorDev->SetBatch(sensorInfo[i].sensorId, sensorInterval, reportInterval); if (ret != 0) { printf("SetBatch failed\n ,ret: %d",ret); continue; } printf("SetBatch success\n"); /* 5.使能传感器 */ ret = g_sensorDev->Enable(sensorInfo[i].sensorId); if (ret != 0) { continue; } printf("Enable success\n"); usleep(1000 * 1000); /* 6.去使能传感器 */ ret = g_sensorDev->Disable(sensorInfo[i].sensorId); if (ret != 0) { continue; } printf("Disable success\n"); } /* 7.取消传感器数据订阅函数 */ ret = g_sensorDev->Unregister(TRADITIONAL_SENSOR_TYPE, SensorDataCallback); if (ret != 0) { return; } printf("Unregister success\n"); } -
编译文件gn参考代码如下:
import("//build/ohos.gni") import("//build/test.gni") import("//drivers/hdf_core/adapter/uhdf2/uhdf.gni") module_output_path = "drivers_peripheral_sensor/sensor" ohos_unittest("sensor_test") { module_out_path = module_output_path sources = [ "sensor_test.cpp" ] include_dirs = [ "//drivers/peripheral/sensor/interfaces/include", ] deps = [ "//drivers/peripheral/sensor/hal:hdi_sensor" ] external_deps = [ "c_utils:utils", "hdf_core:libhdf_utils", "hiviewdfx_hilog_native:libhilog", ] cflags = [ "-Wall", "-Wextra", "-Werror", "-Wno-format", "-Wno-format-extra-args", ] install_enable = true install_images = [ "vendor" ] module_install_dir = "bin" part_name = "unionman_products" }
最后
有很多小伙伴不知道学习哪些鸿蒙开发技术?不知道需要重点掌握哪些鸿蒙应用开发知识点?而且学习时频繁踩坑,最终浪费大量时间。所以有一份实用的鸿蒙(HarmonyOS NEXT)资料用来跟着学习是非常有必要的。
这份鸿蒙(HarmonyOS NEXT)资料包含了鸿蒙开发必掌握的核心知识要点,内容包含了(ArkTS、ArkUI开发组件、Stage模型、多端部署、分布式应用开发、音频、视频、WebGL、OpenHarmony多媒体技术、Napi组件、OpenHarmony内核、Harmony南向开发、鸿蒙项目实战等等)鸿蒙(HarmonyOS NEXT)技术知识点。
希望这一份鸿蒙学习资料能够给大家带来帮助,有需要的小伙伴自行领取,限时开源,先到先得~无套路领取!!
获取这份完整版高清学习路线,请点击→纯血版全套鸿蒙HarmonyOS学习资料
鸿蒙(HarmonyOS NEXT)最新学习路线
-
HarmonOS基础技能
- HarmonOS就业必备技能
- HarmonOS多媒体技术
- 鸿蒙NaPi组件进阶
- HarmonOS高级技能

- 初识HarmonOS内核
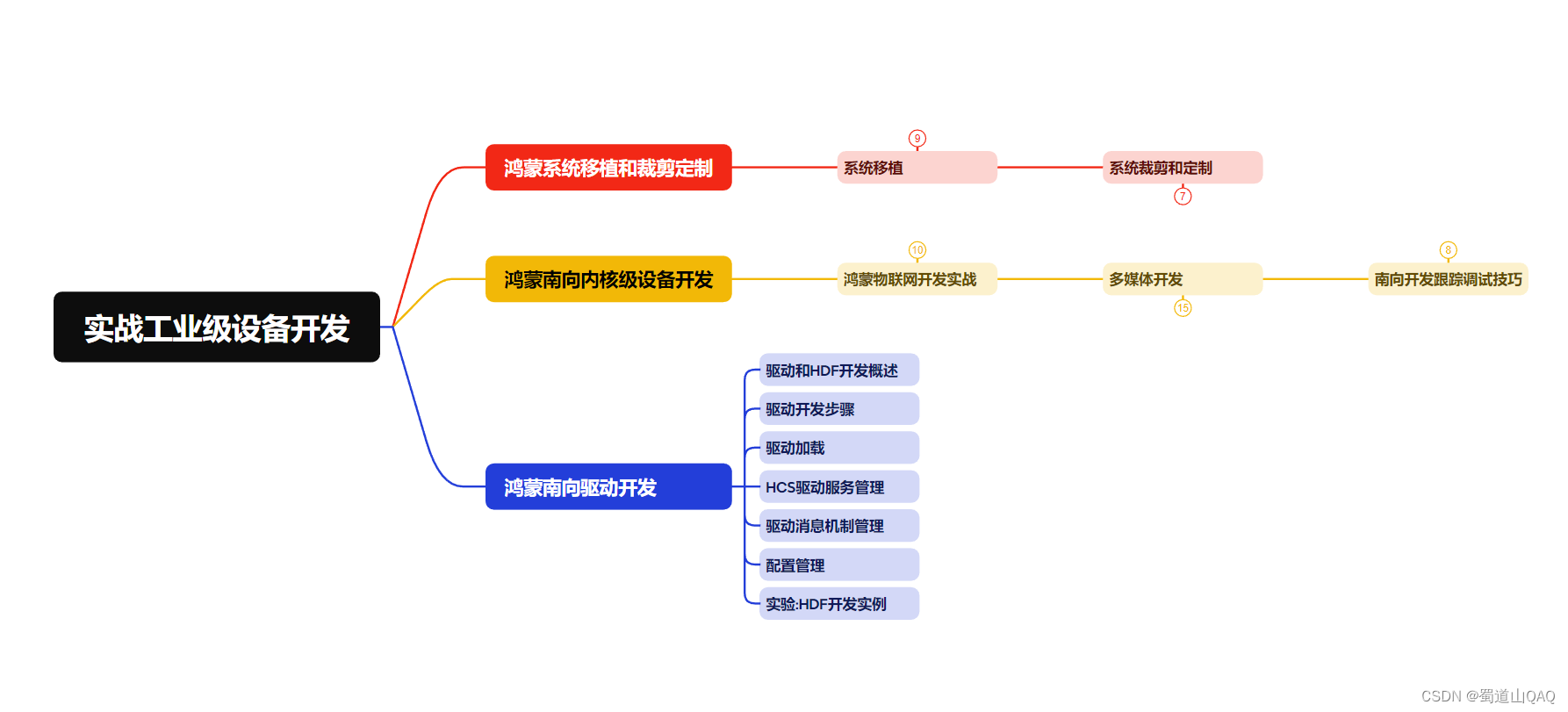
- 实战就业级设备开发
有了路线图,怎么能没有学习资料呢,小编也准备了一份联合鸿蒙官方发布笔记整理收纳的一套系统性的鸿蒙(OpenHarmony )学习手册(共计1236页)与鸿蒙(OpenHarmony )开发入门教学视频,内容包含:ArkTS、ArkUI、Web开发、应用模型、资源分类…等知识点。
获取以上完整版高清学习路线,请点击→纯血版全套鸿蒙HarmonyOS学习资料
《鸿蒙 (OpenHarmony)开发入门教学视频》
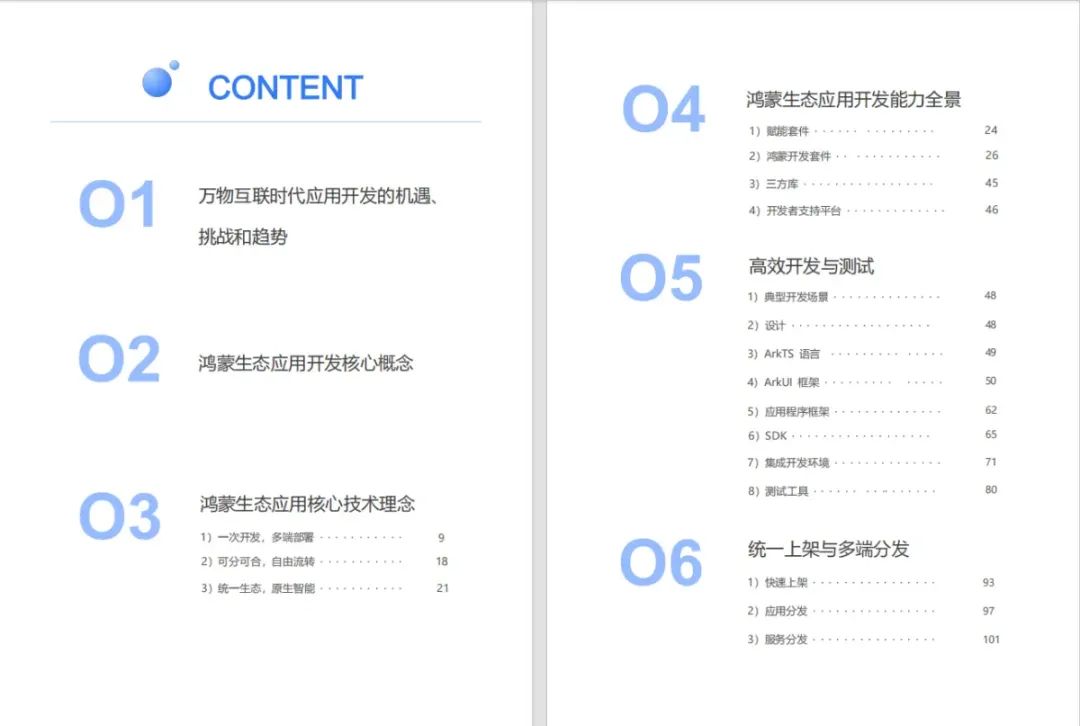
《鸿蒙生态应用开发V2.0白皮书》
《鸿蒙 (OpenHarmony)开发基础到实战手册》
OpenHarmony北向、南向开发环境搭建
《鸿蒙开发基础》
- ArkTS语言
- 安装DevEco Studio
- 运用你的第一个ArkTS应用
- ArkUI声明式UI开发
- .……
《鸿蒙开发进阶》
- Stage模型入门
- 网络管理
- 数据管理
- 电话服务
- 分布式应用开发
- 通知与窗口管理
- 多媒体技术
- 安全技能
- 任务管理
- WebGL
- 国际化开发
- 应用测试
- DFX面向未来设计
- 鸿蒙系统移植和裁剪定制
- ……
《鸿蒙进阶实战》
- ArkTS实践
- UIAbility应用
- 网络案例
- ……
获取以上完整鸿蒙HarmonyOS学习资料,请点击→纯血版全套鸿蒙HarmonyOS学习资料
总结
总的来说,华为鸿蒙不再兼容安卓,对中年程序员来说是一个挑战,也是一个机会。只有积极应对变化,不断学习和提升自己,他们才能在这个变革的时代中立于不败之地。















 828
828











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









