







图像轮廓
获取轮廓信息
contours(轮廓信息),hierarchy = cv2.findContours(图像数据,轮廓检索模式,轮廓逼近方法)
轮廓检索模式
RETR_EXTERNAL:只检索最外面的轮廓
RETR_LIST:检索所有轮廓,并保存到一条链表中
RETR_CCOMP:检索所有轮廓,并将其组织成为两层:顶层是各部分的外部边界,第二层是空洞的边界
RETR_TREE:检索所有轮廓,并重构嵌套轮廓的整个层次(常用)
轮廓逼近方法
CHAIN_APPROX_NONE:以Freeman链码的方式输出轮廓,所有的其它方法输出多边形
CHAIN_APPROX_SIMPLE:压缩水平、垂直和斜的部分,只保留终点部分
例:
img=cv2.imread('tp\\dawn-sun-mountain-landscape-preview.jpg')
gray=cv2.cvtColor(img,cv2.COLOR_BGRA2GRAY)
ret,a = cv2.threshold(gray,100,255,cv2.THRESH_BINARY)#为了更高的精度,使用二值图像
contours,hierarchy = cv2.findContours(a,cv2.RETR_TREE,cv2.CHAIN_APPROX_NONE)
绘制轮廓
cv2.drawContours(图像数据,轮廓信息,轮廓索引(-1:绘制所有轮廓),颜色模式,线条宽度)
cv2.rectangle(图像数据,原点,(宽,高),颜色模式,线条宽度)#画矩形
cv2.circle(图像数据,原点,半径,颜色模式,线条宽度)#画圆
绘制轮廓会改变原图,检验先复制原图
例:
woman = cv2.imread('tp\\beauty-woman-portrait-face-preview.jpg',0)
woman1 = cv2.imread('tp\\beauty-woman-portrait-face-preview.jpg')
ret,a = cv2.threshold(woman,100,255,cv2.THRESH_BINARY)#为了更高的精度,使用二值图像
contours,hierarchy = cv2.findContours(a,cv2.RETR_TREE,cv2.CHAIN_APPROX_NONE)
res = cv2.drawContours(woman1,contours,-1,(255,0,0),2)
cv2.imshow("",res)
cv2.waitKey(0)
yuan=cv2.imread("tp\\1.jpg")
kernel=np.ones((5,5),np.uint8)
gradient = cv2.morphologyEx(yuan,cv2.MORPH_GRADIENT,kernel) #梯度运算
gradient1 = cv2.cvtColor(gradient,cv2.COLOR_BGR2GRAY)
ret,a = cv2.threshold(gradient1,100,255,cv2.THRESH_BINARY)#为了更高的精度,使用二值图像
contours,hierarchy = cv2.findContours(a,cv2.RETR_TREE,cv2.CHAIN_APPROX_NONE)
#边界外接矩形
x,y,w,h = cv2.boundingRect(contours[0])
#画矩形
gradient2=gradient.copy()
rect = cv2.rectangle(gradient2,(x,y),(x+w,y+h),(0,0,255),2)
#外接圆
(x,y),r=cv2.minEnclosingCircle(contours[0])
center = (int(x),int(y))
r = int(r)
#画圆
gradient3=gradient.copy()
circle = cv2.circle(gradient3,center,r,(0,0,255),2)
res = np.hstack([rect,circle])
cv2.imshow("",res)
cv2.waitKey(0)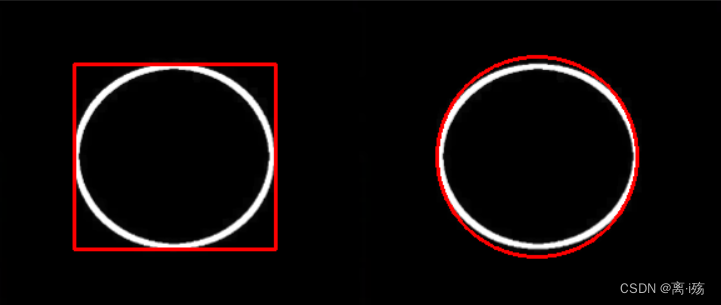
模板匹配
匹配单个对象
模板在原图像上从原点开始滑动,计算重叠部分的差别程度,然后将每次的结果放入一个矩阵中。
原图大小:AxB,模板大小:axb,输出矩阵大小:(A-a+1)x(B-b+1)
res = cv2.matchTemplate(原图,模板,模式)
TM_SQDIFF:计算平方不同,值越小,越相关
TM_CCORR:计算相关性,值越大,越相关
TM_CCOEFF:计算相关系数,值越大,越相关
TM_SQDIFF_NORMED:计算归一化平方不同,值越接近0,越相关
TM_CCORR_NORMED:计算归一化相关性,值越接近1,越相关
TM_CCOEFF_NORMED:计算归一化相关系数,值越接近1,越相关
推荐使用带有归一化的
公式:https://docs.opencv.org/4.5.5/df/dfb/group__imgproc__object.html
例:
woman = cv2.imread('tp\\beauty-woman-portrait-face-preview.jpg',0)
woman1 = cv2.imread('tp\\beauty-woman-portrait-face-preview.jpg')
face = cv2.imread('tp\\face.jpg',0)
h,w = face.shape[:2]
res = cv2.matchTemplate(woman,face,cv2.TM_CCORR_NORMED)
min_v,max_v,min_loc,max_loc = cv2.minMaxLoc(res)#获取最小值,最大值,最小值位置,最大值位置
res = cv2.rectangle(woman1,max_loc,(max_loc[0]+w,max_loc[1]+h),(0,0,255),2)#标记最佳位置
cv2.imshow("",res)
cv2.waitKey(0) 模板
模板

匹配多个对象
img = cv2.imread('tp\\background-frame-food-kitchen-preview.jpg')
mb = cv2.imread('tp\\2.jpg')
h,w = mb.shape[:2]
res = cv2.matchTemplate(img,mb,cv2.TM_CCORR_NORMED)
threshold = 0.93
#取匹配程度大的坐标
loc = np.where(res>=threshold)
for i in zip(*loc[::-1]):
location = (i[0]+w,i[1]+h)
cv2.rectangle(img,i,location,(0,0,255),1)
cv2.imshow("",img)
cv2.waitKey(0)  模板
模板

直方图
#cv2.calcHist([img],channels,mask,[histSize],ranges)
#img:图像(格式:uint8 or float32)
#channels:灰度图[0] 彩色图[0][1][2]对应BGR
#mask:掩模图。统计整幅图像的直方图(None)
#histSize:BIN的数目
#ranges:像素值的范围通常为[0,256] 例:
img=cv2.imread('tp\\dawn-sun-mountain-landscape-preview.jpg')
for i in range(3):
ab=cv2.calcHist([img],[i],None,[256],[0,256])
plt.plot(ab)
plt.show()
#直方图均衡化
#equ = cv2.equalizeHist(gray)
#自适应直方图均衡化
#clahe = cv2.createCLAHE(clipLimit=2.0,tileGridSize=(9,9))
#res_clahe = clahe.apply(gray)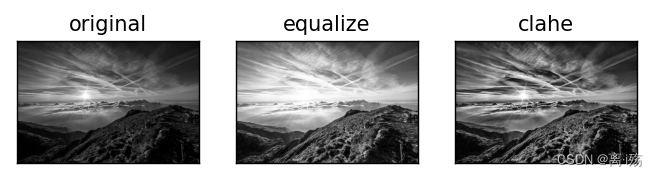
滤波
高通滤波
#高通滤波器:只保留高频,使图像细节模糊
img=cv2.imread('tp\\dawn-sun-mountain-landscape-preview.jpg')
gray=cv2.cvtColor(img,cv2.COLOR_BGRA2GRAY)
img_float32 = np.float32(gray)
dft = cv2.dft(img_float32,flags = cv2.DFT_COMPLEX_OUTPUT)
dft_shift = np.fft.fftshift(dft)#将频率为0的部分移到中间
h,w=gray.shape
ch,cw=int(h/2),int(w/2)#中心位置
mask = np.ones((h,w,2),np.uint8)
mask[ch-30:ch+30,cw-30:cw+30]=0
fshift = dft_shift*mask
f_ishift=np.fft.ifftshift(fshift)
img_back = cv2.idft(f_ishift)
img_back = cv2.magnitude(img_back[:,:,0],img_back[:,:,1])
plt.imshow(img_back,'gray')
plt.show()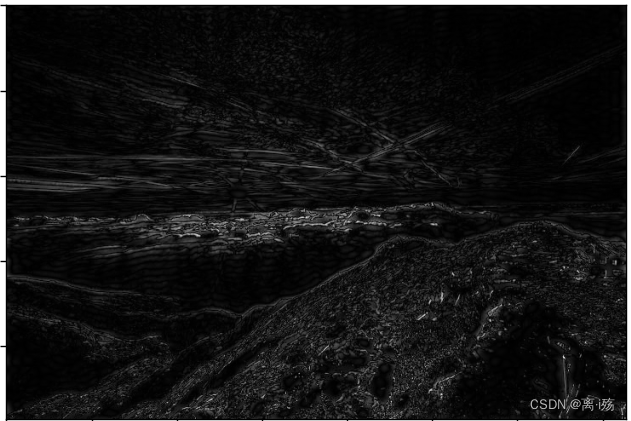
低通滤波
#低通滤波器:只保留低频,使图像边界模糊
img=cv2.imread('tp\\dawn-sun-mountain-landscape-preview.jpg')
gray=cv2.cvtColor(img,cv2.COLOR_BGRA2GRAY)
img_float32 = np.float32(gray)
dft = cv2.dft(img_float32,flags = cv2.DFT_COMPLEX_OUTPUT)
dft_shift = np.fft.fftshift(dft)#将频率为0的部分移到中间
h,w=gray.shape
ch,cw=int(h/2),int(w/2)#中心位置
mask = np.zeros((h,w,2),np.uint8)
mask[ch-30:ch+30,cw-30:cw+30]=1
fshift = dft_shift*mask
f_ishift=np.fft.ifftshift(fshift)
img_back = cv2.idft(f_ishift)
img_back = cv2.magnitude(img_back[:,:,0],img_back[:,:,1])
plt.imshow(img_back,'gray')
plt.show()















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









