






 本文详细介绍了在STM32平台上使用ADC1和ADC2进行数据采集的初始化过程,包括设置时钟、配置通道、GPIO接口初始化和多模式配置等步骤,并提供了相应的函数实现。
本文详细介绍了在STM32平台上使用ADC1和ADC2进行数据采集的初始化过程,包括设置时钟、配置通道、GPIO接口初始化和多模式配置等步骤,并提供了相应的函数实现。
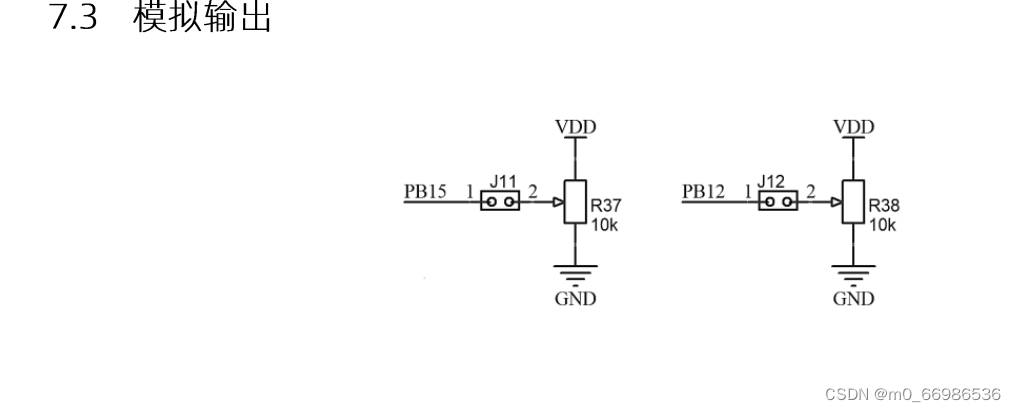
1.原理图
2.配置
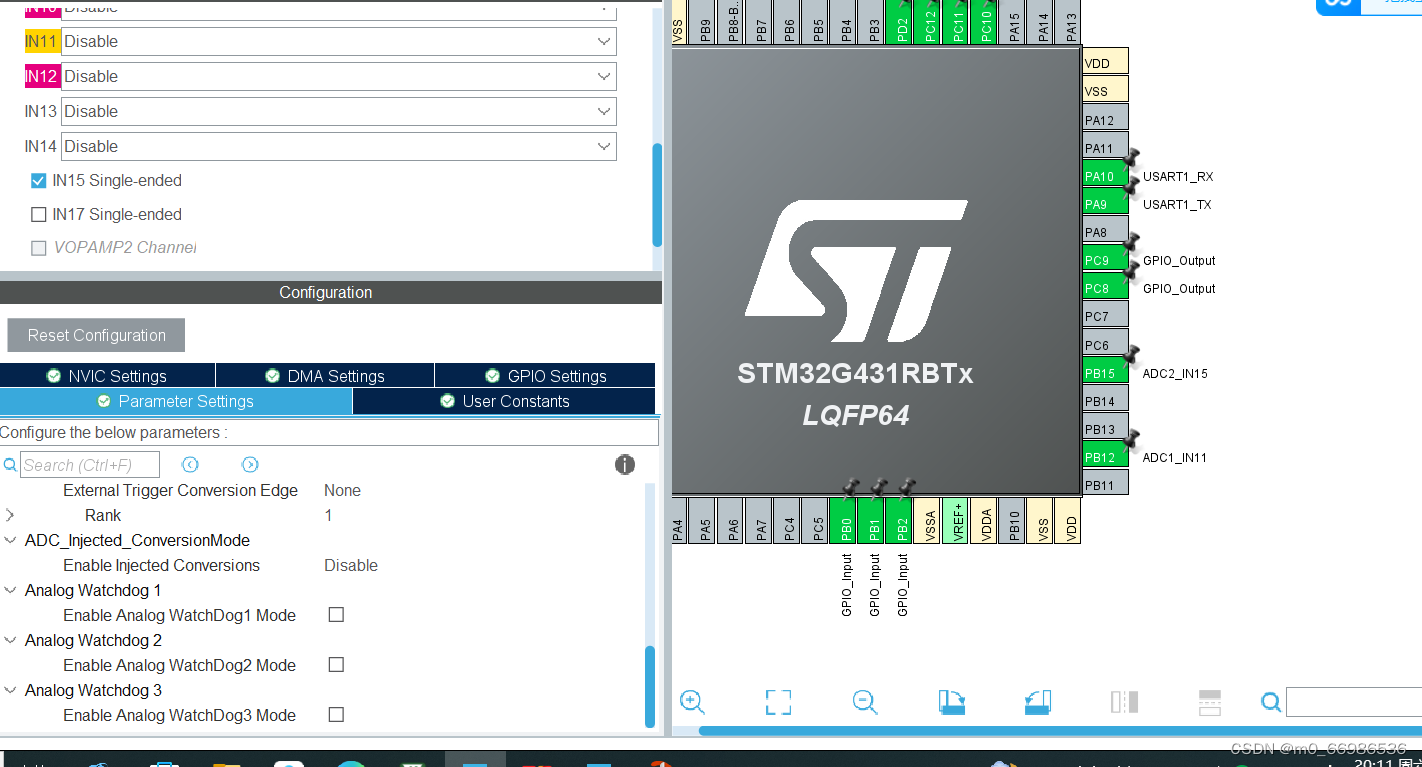
3.修改源码
#include "adc.h"
ADC_HandleTypeDef hadc1;
ADC_HandleTypeDef hadc2;
/* ADC1 init function */
void ADC1_Init(void)
{
/* USER CODE BEGIN ADC1_Init 0 */
/* USER CODE END ADC1_Init 0 */
ADC_MultiModeTypeDef multimode = {0};
ADC_ChannelConfTypeDef sConfig = {0};
/* USER CODE BEGIN ADC1_Init 1 */
/* USER CODE END ADC1_Init 1 */
/** Common config
*/
hadc1.Instance = ADC1;
hadc1.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV2;
hadc1.Init.Resolution = ADC_RESOLUTION_12B;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.GainCompensation = 0;
hadc1.Init.ScanConvMode = ADC_SCAN_DISABLE;
hadc1.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
hadc1.Init.LowPowerAutoWait = DISABLE;
hadc1.Init.ContinuousConvMode = DISABLE;
hadc1.Init.NbrOfConversion = 1;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc1.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
hadc1.Init.DMAContinuousRequests = DISABLE;
hadc1.Init.Overrun = ADC_OVR_DATA_PRESERVED;
hadc1.Init.OversamplingMode = DISABLE;
if (HAL_ADC_Init(&hadc1) != HAL_OK)
{
Error_Handler();
}
/** Configure the ADC multi-mode
*/
multimode.Mode = ADC_MODE_INDEPENDENT;
if (HAL_ADCEx_MultiModeConfigChannel(&hadc1, &multimode) != HAL_OK)
{
Error_Handler();
}
/** Configure Regular Channel
*/
sConfig.Channel = ADC_CHANNEL_11;
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_2CYCLES_5;
sConfig.SingleDiff = ADC_SINGLE_ENDED;
sConfig.OffsetNumber = ADC_OFFSET_NONE;
sConfig.Offset = 0;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN ADC1_Init 2 */
/* USER CODE END ADC1_Init 2 */
}
/* ADC2 init function */
void ADC2_Init(void)
{
/* USER CODE BEGIN ADC2_Init 0 */
/* USER CODE END ADC2_Init 0 */
ADC_ChannelConfTypeDef sConfig = {0};
/* USER CODE BEGIN ADC2_Init 1 */
/* USER CODE END ADC2_Init 1 */
/** Common config
*/
hadc2.Instance = ADC2;
hadc2.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV2;
hadc2.Init.Resolution = ADC_RESOLUTION_12B;
hadc2.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc2.Init.GainCompensation = 0;
hadc2.Init.ScanConvMode = ADC_SCAN_DISABLE;
hadc2.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
hadc2.Init.LowPowerAutoWait = DISABLE;
hadc2.Init.ContinuousConvMode = DISABLE;
hadc2.Init.NbrOfConversion = 1;
hadc2.Init.DiscontinuousConvMode = DISABLE;
hadc2.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc2.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
hadc2.Init.DMAContinuousRequests = DISABLE;
hadc2.Init.Overrun = ADC_OVR_DATA_PRESERVED;
hadc2.Init.OversamplingMode = DISABLE;
if (HAL_ADC_Init(&hadc2) != HAL_OK)
{
Error_Handler();
}
/** Configure Regular Channel
*/
sConfig.Channel = ADC_CHANNEL_15;
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_2CYCLES_5;
sConfig.SingleDiff = ADC_SINGLE_ENDED;
sConfig.OffsetNumber = ADC_OFFSET_NONE;
sConfig.Offset = 0;
if (HAL_ADC_ConfigChannel(&hadc2, &sConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN ADC2_Init 2 */
/* USER CODE END ADC2_Init 2 */
}
uint16_t get_ADC1(void)
{
uint16_t adc;
HAL_ADC_Start(&hadc1);
adc=HAL_ADC_GetValue(&hadc1);
return adc;
}
uint16_t get_ADC2(void)
{
uint16_t adc;
HAL_ADC_Start(&hadc2);
adc=HAL_ADC_GetValue(&hadc2);
return adc;
}
static uint32_t HAL_RCC_ADC12_CLK_ENABLED=0;
void HAL_ADC_MspInit(ADC_HandleTypeDef* adcHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};
if(adcHandle->Instance==ADC1)
{
/* USER CODE BEGIN ADC1_MspInit 0 */
/* USER CODE END ADC1_MspInit 0 */
/** Initializes the peripherals clocks
*/
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_ADC12;
PeriphClkInit.Adc12ClockSelection = RCC_ADC12CLKSOURCE_SYSCLK;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
/* ADC1 clock enable */
HAL_RCC_ADC12_CLK_ENABLED++;
if(HAL_RCC_ADC12_CLK_ENABLED==1){
__HAL_RCC_ADC12_CLK_ENABLE();
}
__HAL_RCC_GPIOB_CLK_ENABLE();
/**ADC1 GPIO Configuration
PB12 ------> ADC1_IN11
*/
GPIO_InitStruct.Pin = GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* USER CODE BEGIN ADC1_MspInit 1 */
/* USER CODE END ADC1_MspInit 1 */
}
else if(adcHandle->Instance==ADC2)
{
/* USER CODE BEGIN ADC2_MspInit 0 */
/* USER CODE END ADC2_MspInit 0 */
/** Initializes the peripherals clocks
*/
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_ADC12;
PeriphClkInit.Adc12ClockSelection = RCC_ADC12CLKSOURCE_SYSCLK;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
/* ADC2 clock enable */
HAL_RCC_ADC12_CLK_ENABLED++;
if(HAL_RCC_ADC12_CLK_ENABLED==1){
__HAL_RCC_ADC12_CLK_ENABLE();
}
__HAL_RCC_GPIOB_CLK_ENABLE();
/**ADC2 GPIO Configuration
PB15 ------> ADC2_IN15
*/
GPIO_InitStruct.Pin = GPIO_PIN_15;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* USER CODE BEGIN ADC2_MspInit 1 */
/* USER CODE END ADC2_MspInit 1 */
}
}
void HAL_ADC_MspDeInit(ADC_HandleTypeDef* adcHandle)
{
if(adcHandle->Instance==ADC1)
{
/* USER CODE BEGIN ADC1_MspDeInit 0 */
/* USER CODE END ADC1_MspDeInit 0 */
/* Peripheral clock disable */
HAL_RCC_ADC12_CLK_ENABLED--;
if(HAL_RCC_ADC12_CLK_ENABLED==0){
__HAL_RCC_ADC12_CLK_DISABLE();
}
/**ADC1 GPIO Configuration
PB12 ------> ADC1_IN11
*/
HAL_GPIO_DeInit(GPIOB, GPIO_PIN_12);
/* USER CODE BEGIN ADC1_MspDeInit 1 */
/* USER CODE END ADC1_MspDeInit 1 */
}
else if(adcHandle->Instance==ADC2)
{
/* USER CODE BEGIN ADC2_MspDeInit 0 */
/* USER CODE END ADC2_MspDeInit 0 */
/* Peripheral clock disable */
HAL_RCC_ADC12_CLK_ENABLED--;
if(HAL_RCC_ADC12_CLK_ENABLED==0){
__HAL_RCC_ADC12_CLK_DISABLE();
}
/**ADC2 GPIO Configuration
PB15 ------> ADC2_IN15
*/
HAL_GPIO_DeInit(GPIOB, GPIO_PIN_15);
}
}















 645
645











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









