







1 内存是什么
编程的本质其实就是操控数据,而数据存放在内存中。
内存就是计算机的存储空间,用于存储程序的指令、数据和状态。
根据变量的类型和作用域,内存分为几个区域,如栈(stack)、堆(heap)和全局/静态存储区。
1.1 内存编址
计算机的内存是一块用于存储数据的空间,由一系列连续的存储单元组成,每一个单元格都表示 1 个 Bit。由于 1 个 bit 只能表示两个状态,所以大佬们规定 8个 bit 为一组,命名为 byte。并且将 byte 作为内存寻址的最小单元,也就是给每个 byte 一个编号,这个编号就叫内存的地址。
1.2 变量的本质
有了内存,接下来我们需要考虑,int、double 这些变量是如何存储在 0、1 单元格的。 在 C 语言中我们会这样定义变量:
int a = 999;
char c = 'c';
当你写下一个变量定义的时候,实际上是向内存申请了一块空间来存放你的变量。 我们都知道 int 类型占 4 个字节,并且在计算机中数字都是用补码表示的。
999 换算成补码就是:0000 0011 1110 0111
这里有 4 个byte,所以需要四个单元格来存储:
有没有注意到,我们把高位的字节放在了低地址的地方。 那能不能反过来呢? 当然,这就引出了大端和小端。 像上面这种将高位字节放在内存低地址的方式叫做大端 反之,将低位字节放在内存低地址的方式就叫做小端(大小端详解)
2 内存分区
内存分为堆、bss、data、txt、栈等区域
2.1 代码区(Code Segment)
也就是 .text 段, 代码区存放程序的二进制代码,它是只读的,以防止程序在运行过程中被意外修改。
#include <iostream>
int main() {
std::cout << "Hello, World!" << std::endl;
return 0;
}
比如上面这段代码中的 main 函数,编译为二进制后,函数的逻辑就存放在代码区。
当然这段区域也有可能包含一些只读的常数变量,例如字符串常量等。
2.2 全局/静态存储区(Global/Static Storage)
全局变量和静态变量都存放在全局/静态存储区。
以前在 C 语言中全局变量又分为初始化的和未初始化的,分别放在上面图中的 .bss 和 .data 段,但在 C++里面没有这个区分了,他们共同占用同一块内存区,就叫做全局存储区。
这个区域的内存在程序的生命周期几乎都是全局的,举例:
#include <iostream>
int globalVar = 0; // 全局变量
void function() {
static int staticVar = 0; // 静态变量
staticVar++;
std::cout << staticVar << std::endl;
}
int main() {
function();
function();
return 0;
}globalVar是一个全局变量,staticVar是一个静态变量,它们都存放在全局/静态存储区。
2.3栈区(Stack)
栈区用于存储函数调用时的局部变量、函数参数以及返回地址。
当函数调用完成后,分配给这个函数的栈空间会被释放。例如:
#include <iostream>
void function(int a, int b) {
int localVar = a + b;
std::cout << localVar << std::endl;
}
int main() {
function(3, 4);
return 0;
}
在这个例子中,a、b和localVar都是局部变量,它们存放在栈区。
当 function 函数调用结束后,对应的函数栈所占用的空间(参数 a、b,局部变量 localVar等)都会被回收。
2.4 堆区(Heap)
堆区是用于动态内存分配的区域,当使用new(C++)或者malloc(C)分配内存时,分配的内存块就位于堆区。
我们需要手动释放这些内存,否则可能导致内存泄漏。例如:
#include <iostream>
int main() {
int* dynamicArray = new int[10]; // 动态分配内存
// 使用动态数组...
delete[] dynamicArray; // 释放内存
return 0;
}
#常量区(Constant Storage):
常量区用于存储常量数据,例如字符串字面量和其他编译时常量。这个区域通常也是只读的。例如:
#include <iostream>
int main() {
char* c="abc"; // abc在常量区,c在栈上。
return 0;
}3 智能指针
3.1 C/C++ 常见的内存错误
野指针:未初始化或已经被释放的指针被称为野指针
空指针:指向空地址的指针被称为空指针
内存泄漏:如果在使用完动态分配的内存后忘记释放,就会造成内存泄漏,长时间运行的程序可能会消耗大量内存。
悬空指针:指向已经释放的内存的指针被称为悬空指针
内存泄漏和悬空指针的混合:在一些情况下,由于内存泄漏和悬空指针共同存在,程序可能会出现异常行为。
3.2 RAII 的原理
RAII的核心思想就是:
利用栈上局部变量的自动析构来保证资源一定会被释放。
因为我们平常 C++ 编程过程中,经常会忘了释放资源,比如申请的堆内存忘了手动释放,那么就会导致内存泄露。
还有一些常见是程序遇到了异常,提前终止了,我们的资源也来不及释放。
但是变量的析构函数的调用是由编译器保证的一定会被执行,所以如果资源的获取和释放与对象的构造和析构绑定在一起,就不会有各种资源泄露问题。
3.3 智能指针
智能指针是一种可以自动管理内存的指针,它可以在不需要手动释放内存的情况下,确保对象被正确地销毁。
这种指针可以显著降低程序中的内存泄漏和悬空指针的风险。
智能指针的核心思想就是 RAII,智能指针和引用计数。
4 虚拟内存
操作系统会提供一种机制,将不同进程的虚拟地址和不同内存的物理地址映射起来。
如果程序要访问虚拟地址的时候,由操作系统转换成不同的物理地址,这样不同的进程运行的时候,写入的是不同的物理地址,这样就不会冲突了。
于是,这里就引出了两种地址的概念:
- 我们程序所使用的内存地址叫做虚拟内存地址(Virtual Memory Address)
- 实际存在硬件里面的空间地址叫物理内存地址(Physical Memory Address)。
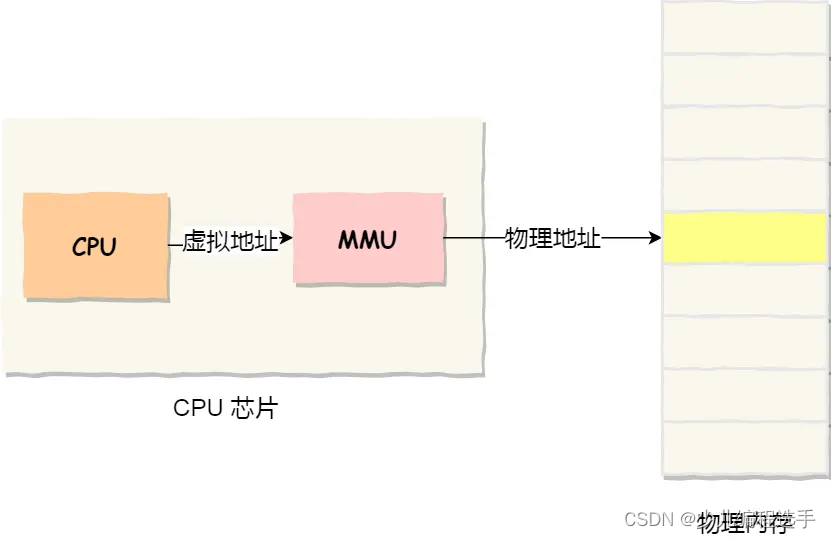
操作系统引入了虚拟内存,进程持有的虚拟地址会通过 CPU 芯片中的内存管理单元(MMU)的映射关系,来转换变成物理地址,然后再通过物理地址访问内存,如下图所示
主要有两种方式,分别是内存分段和内存分页。
4.1 内存分段
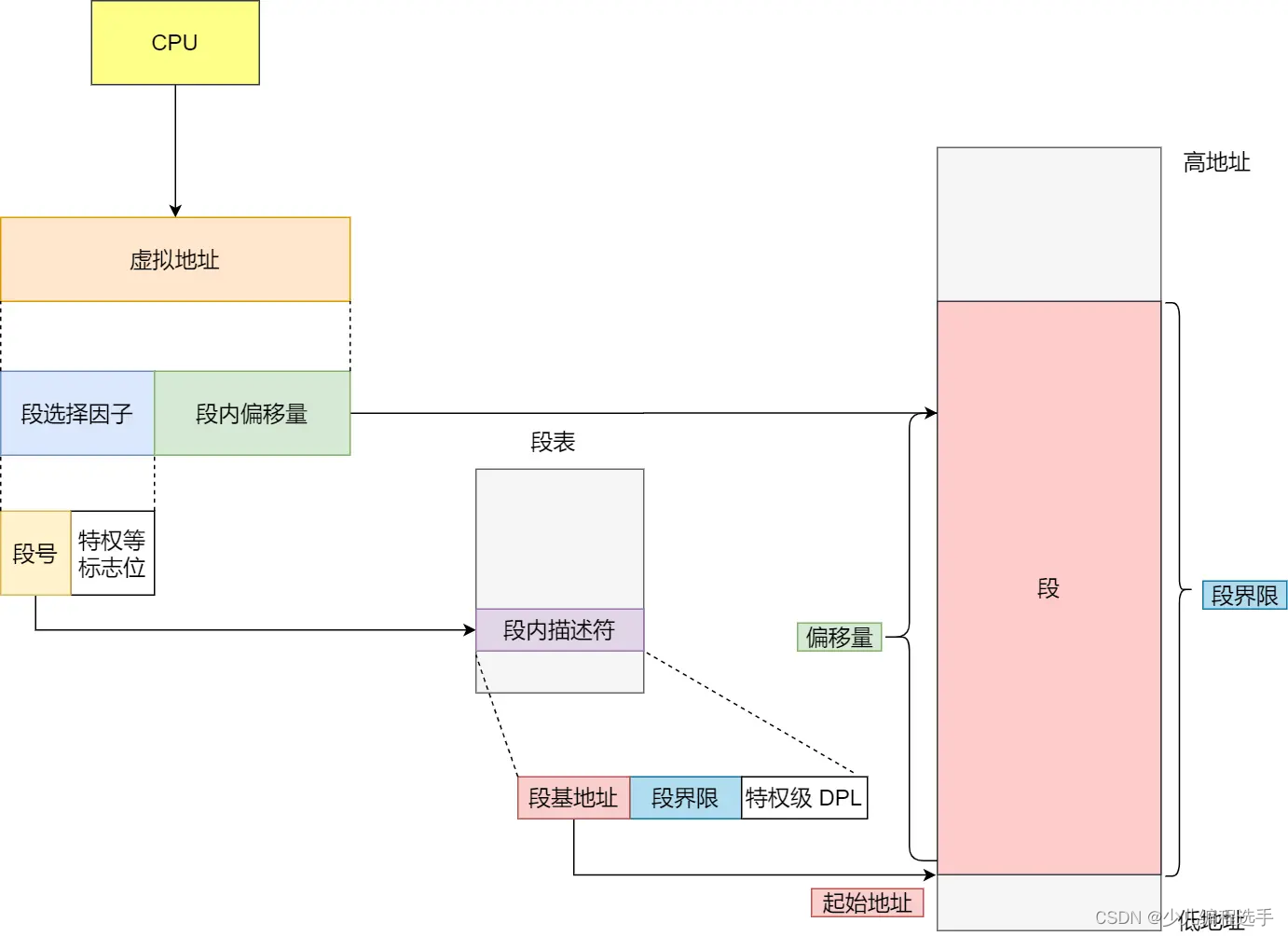
程序是由若干个逻辑分段组成的,如可由代码分段、数据分段、栈段、堆段组成。不同的段是有不同的属性的,所以就用分段(Segmentation)的形式把这些段分离出来。
分段机制下的虚拟地址由两部分组成,段选择因子和段内偏移量。
内存碎片主要分为,内部内存碎片和外部内存碎片。内存分段管理可以做到段根据实际需求分配内存,所以有多少需求就分配多大的段,所以不会出现内部内存碎片。但是由于每个段的长度不固定,所以多个段未必能恰好使用所有的内存空间,会产生了多个不连续的小物理内存,导致新的程序无法被装载,所以会出现外部内存碎片的问题。
4.2 内存分页
分段的好处就是能产生连续的内存空间,但是会出现「外部内存碎片和内存交换的空间太大」的问题。
要解决这些问题,那么就要想出能少出现一些内存碎片的办法。另外,当需要进行内存交换的时候,让需要交换写入或者从磁盘装载的数据更少一点,这样就可以解决问题了。这个办法,也就是内存分页(Paging)。
分页是把整个虚拟和物理内存空间切成一段段固定尺寸的大小。这样一个连续并且尺寸固定的内存空间,我们叫页(Page)。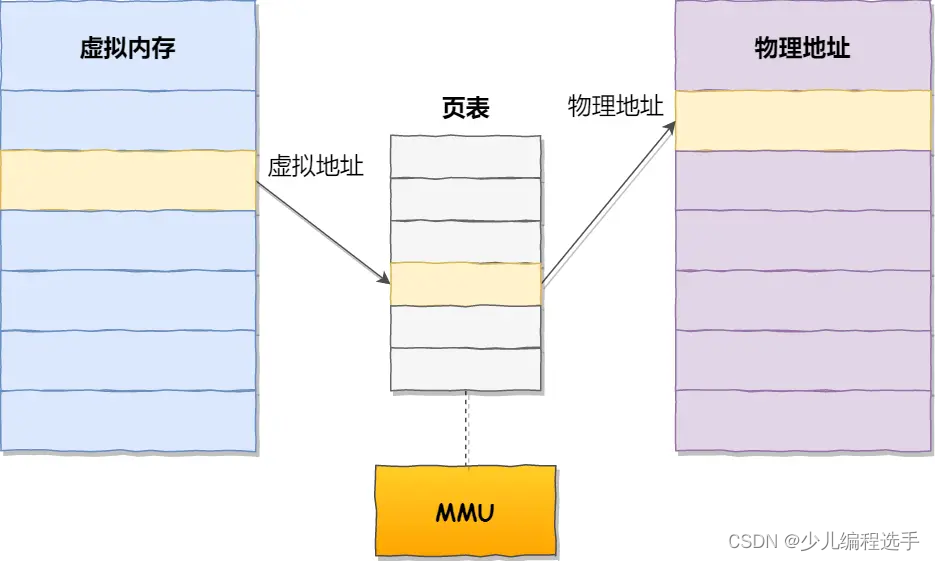
内存分页由于内存空间都是预先划分好的,也就不会像内存分段一样,在段与段之间会产生间隙非常小的内存,这正是分段会产生外部内存碎片的原因。而采用了分页,页与页之间是紧密排列的,所以不会有外部碎片。
但是,因为内存分页机制分配内存的最小单位是一页,即使程序不足一页大小,我们最少只能分配一个页,所以页内会出现内存浪费,所以针对内存分页机制会有内部内存碎片的现象。
如果内存空间不够,操作系统会把其他正在运行的进程中的「最近没被使用」的内存页面给释放掉,也就是暂时写在硬盘上,称为换出(Swap Out)。一旦需要的时候,再加载进来,称为换入(Swap In)。所以,一次性写入磁盘的也只有少数的一个页或者几个页,不会花太多时间,内存交换的效率就相对比较高。
4.3 段页式内存管理
内存分段和内存分页并不是对立的,它们是可以组合起来在同一个系统中使用的,那么组合起来后,通常称为段页式内存管理。
段页式内存管理实现的方式:
- 先将程序划分为多个有逻辑意义的段,也就是前面提到的分段机制;
- 接着再把每个段划分为多个页,也就是对分段划分出来的连续空间,再划分固定大小的页;
这样,地址结构就由段号、段内页号和页内位移三部分组成。
用于段页式地址变换的数据结构是每一个程序一张段表,每个段又建立一张页表,段表中的地址是页表的起始地址,而页表中的地址则为某页的物理页号,如图所示:
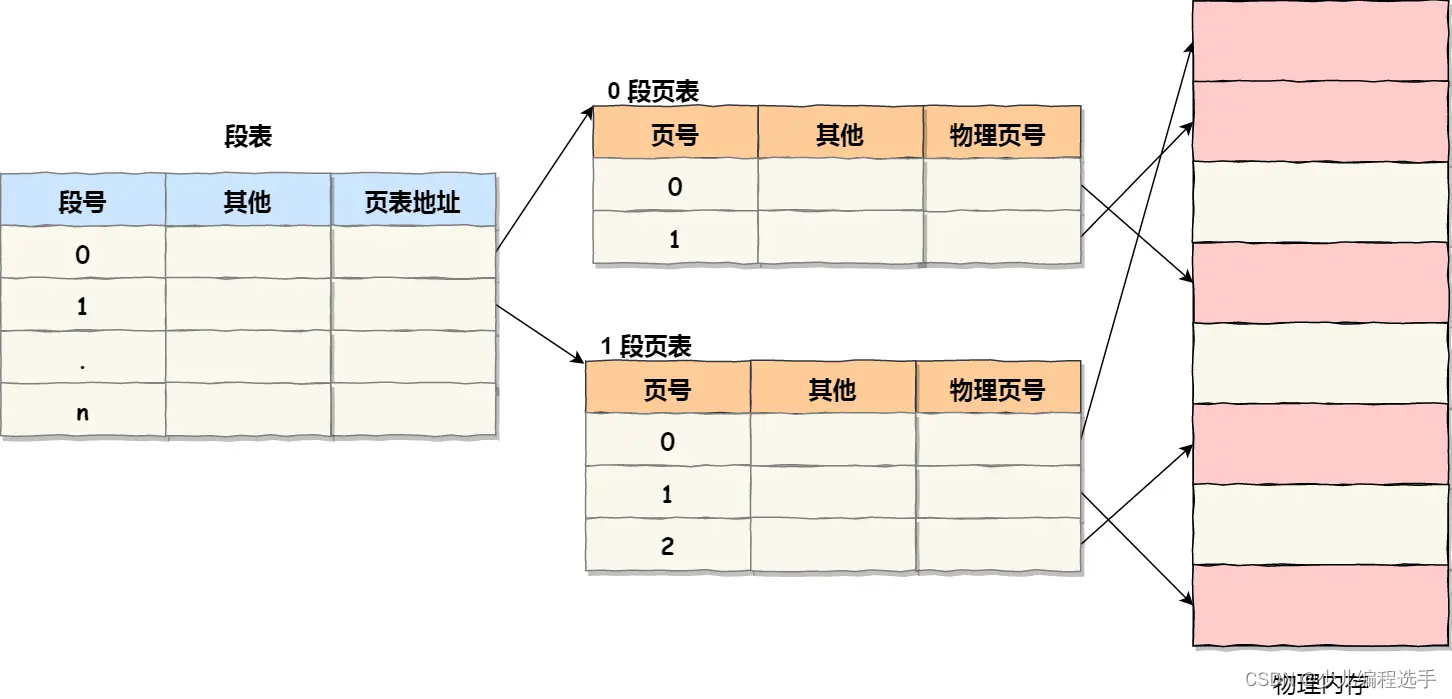
段页式地址变换中要得到物理地址须经过三次内存访问:
- 第一次访问段表,得到页表起始地址;
- 第二次访问页表,得到物理页号;
- 第三次将物理页号与页内位移组合,得到物理地址。
可用软、硬件相结合的方法实现段页式地址变换,这样虽然增加了硬件成本和系统开销,但提高了内存的利用率。
4.4 虚拟内存有什么作用?
- 第一,虚拟内存可以使得进程对运行内存超过物理内存大小,因为程序运行符合局部性原理,CPU 访问内存会有很明显的重复访问的倾向性,对于那些没有被经常使用到的内存,我们可以把它换出到物理内存之外,比如硬盘上的 swap 区域。
- 第二,由于每个进程都有自己的页表,所以每个进程的虚拟内存空间就是相互独立的。进程也没有办法访问其他进程的页表,所以这些页表是私有的,这就解决了多进程之间地址冲突的问题。
- 第三,页表里的页表项中除了物理地址之外,还有一些标记属性的比特,比如控制一个页的读写权限,标记该页是否存在等。在内存访问方面,操作系统提供了更好的安全性。
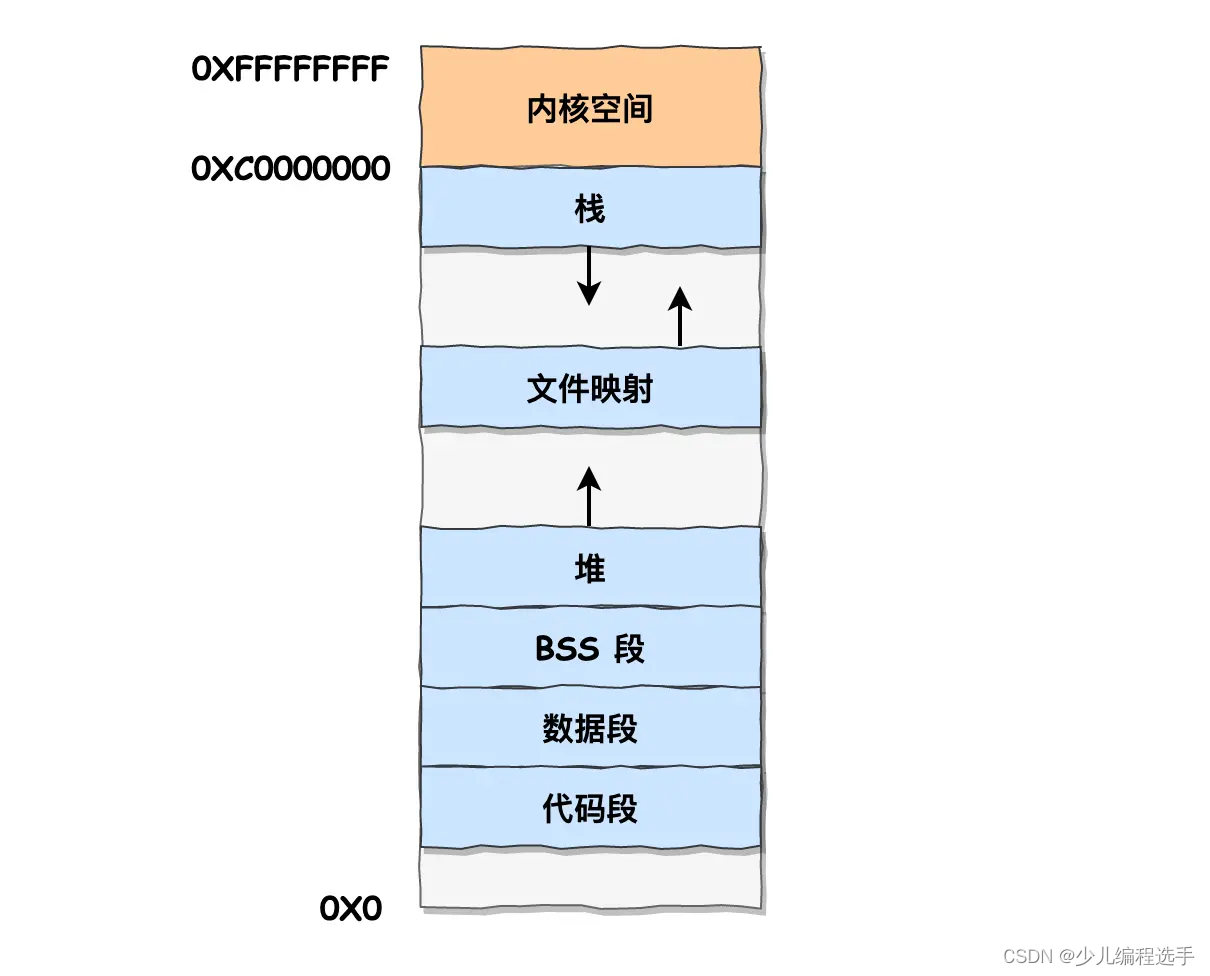
5 内存分配
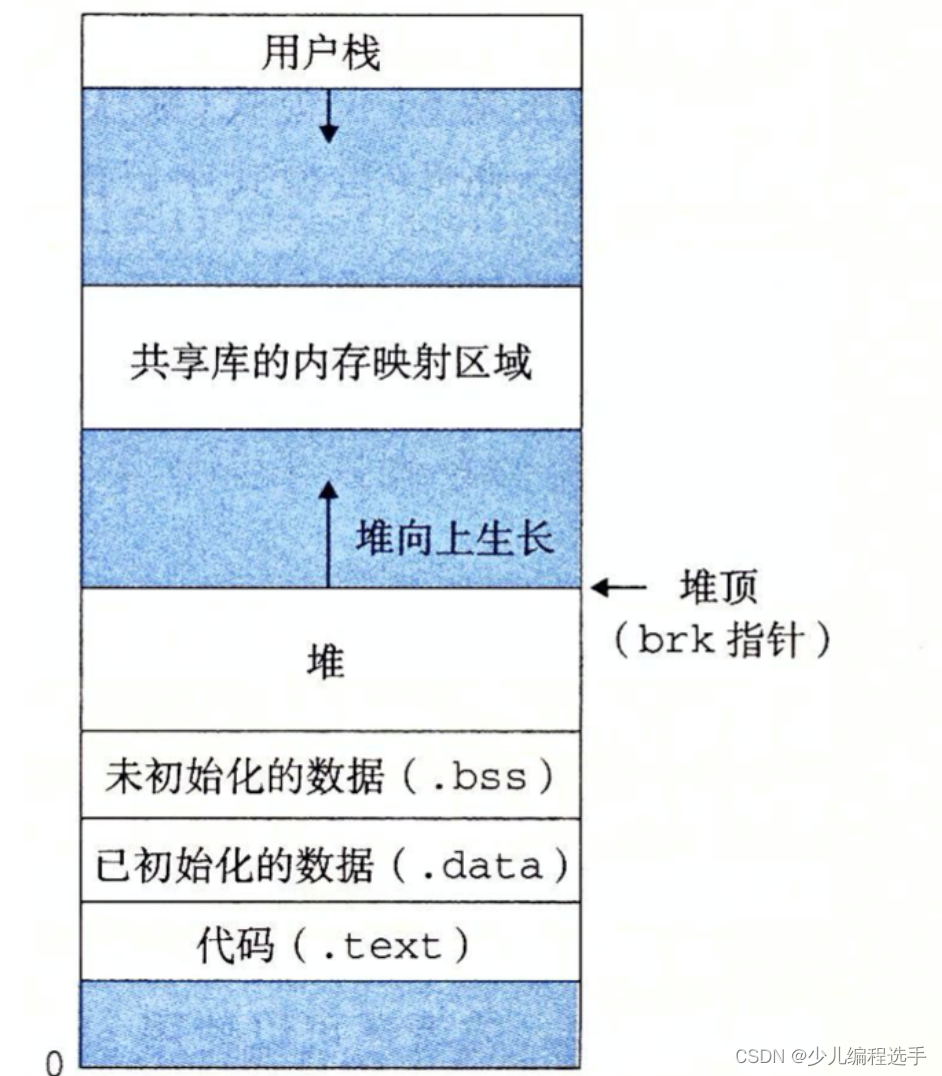
首先用户空间内存从低到高分别是 6 种不同的内存段。
5.1 malloc 是如何分配内存的?
实际上,malloc() 并不是系统调用,而是 C 库里的函数,用于动态分配内存。
malloc 申请内存的时候,会有两种方式向操作系统申请堆内存。
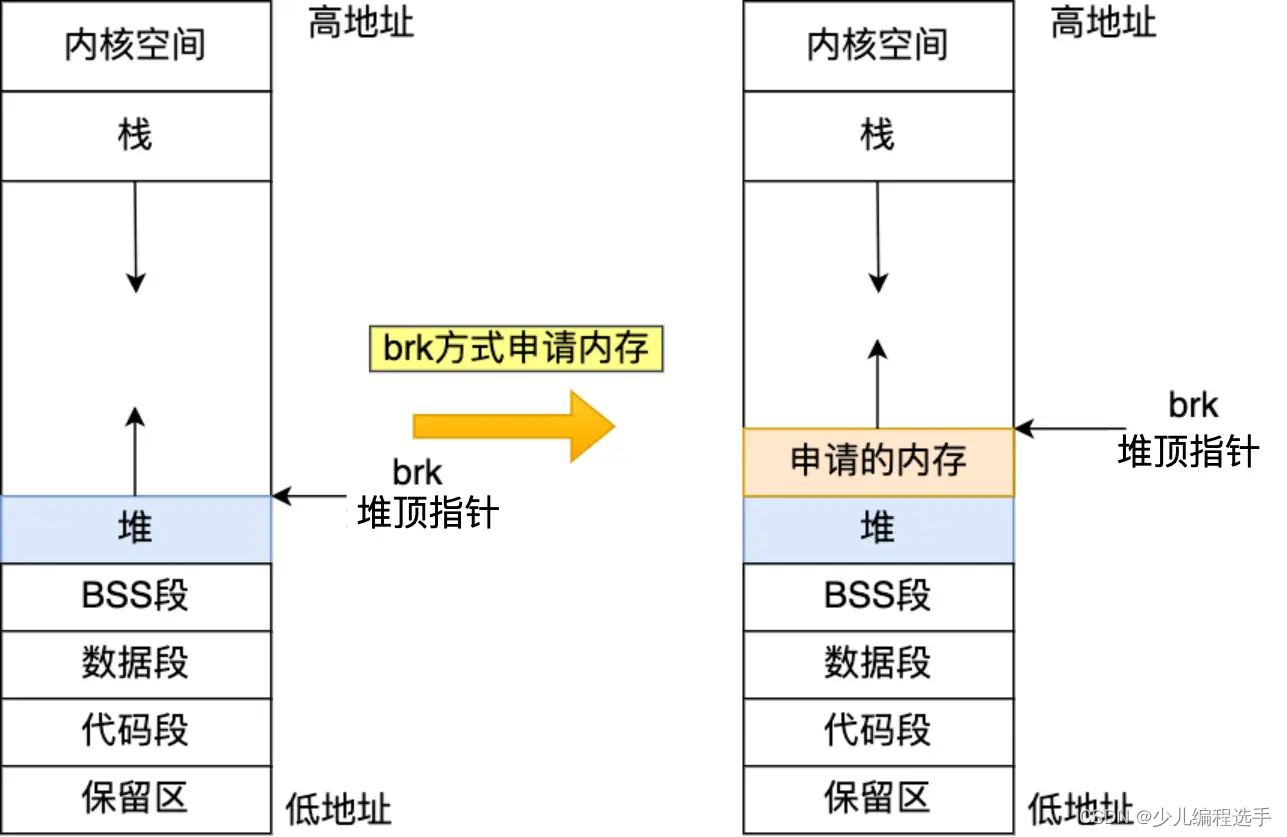
- 方式一:通过 brk() 系统调用从堆分配内存
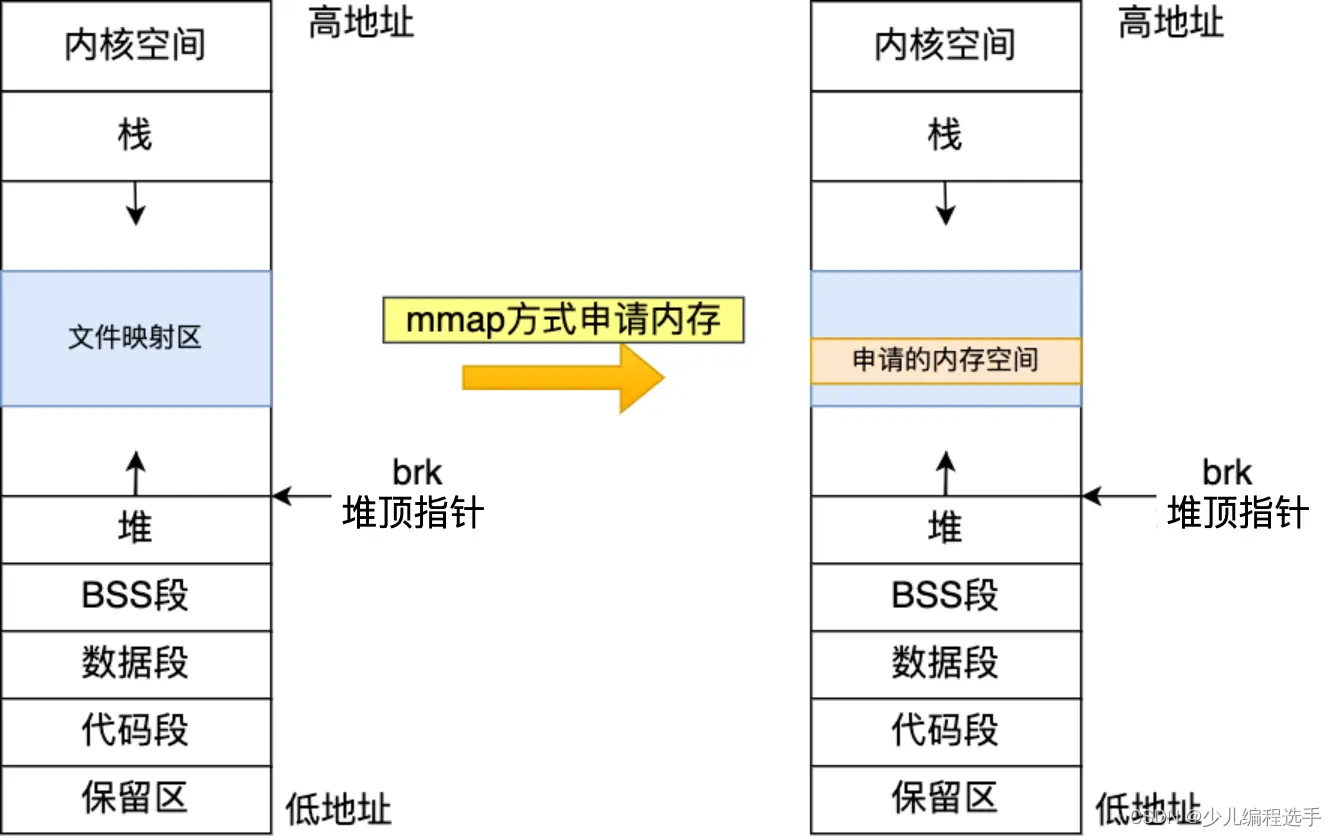
- 方式二:通过 mmap() 系统调用在文件映射区域分配内存;
方式一实现的方式很简单,就是通过 brk() 函数将「堆顶」指针向高地址移动,获得新的内存空间。如下图:
方式二通过 mmap() 系统调用中「私有匿名映射」的方式,在文件映射区分配一块内存,也就是从文件映射区“偷”了一块内存。如下图:
malloc() 源码里默认定义了一个阈值:
- 如果用户分配的内存小于 128 KB,则通过 brk() 申请内存;
- 如果用户分配的内存大于 128 KB,则通过 mmap() 申请内存;
另外malloc() 分配的是虚拟内存,并且malloc(1) 实际上预分配 了不止1字节内存。
5.2 free 释放内存,会归还给操作系统吗?
free 释放1 字节内存(或者更多),这 1 字节释放给操作系统,不如先缓存着放进 malloc 的内存池里,当进程再次申请 1 字节的内存时就可以直接复用,这样速度快了很多。
当然,当进程退出后,操作系统就会回收进程的所有资源。
上面说的 free 内存后堆内存还存在,是针对 malloc 通过 brk() 方式申请的内存的情况。
因此
- malloc 通过 brk() 方式申请的内存,free 释放内存的时候,并不会把内存归还给操作系统,而是缓存在 malloc 的内存池中,待下次使用;
- malloc 通过 mmap() 方式申请的内存,free 释放内存的时候,会把内存归还给操作系统,内存得到真正的释放。
5.3 为什么不全部使用 mmap 来分配内存?
因为向操作系统申请内存,是要通过系统调用的,执行系统调用是要进入内核态的,然后在回到用户态,运行态的切换会耗费不少时间。
所以,申请内存的操作应该避免频繁的系统调用,如果都用 mmap 来分配内存,等于每次都要执行系统调用。
另外,因为 mmap 分配的内存每次释放的时候,都会归还给操作系统,于是每次 mmap 分配的虚拟地址都是缺页状态的,然后在第一次访问该虚拟地址的时候,就会触发缺页中断。
也就是说,频繁通过 mmap 分配的内存话,不仅每次都会发生运行态的切换,还会发生缺页中断(在第一次访问虚拟地址后),这样会导致 CPU 消耗较大。
为了改进这两个问题,malloc 通过 brk() 系统调用在堆空间申请内存的时候,由于堆空间是连续的,所以直接预分配更大的内存来作为内存池,当内存释放的时候,就缓存在内存池中。
等下次在申请内存的时候,就直接从内存池取出对应的内存块就行了,而且可能这个内存块的虚拟地址与物理地址的映射关系还存在,这样不仅减少了系统调用的次数,也减少了缺页中断的次数,这将大大降低 CPU 的消耗。
5.4 为什么不全部使用 brk 来分配?
如果我们连续申请了 10k,20k,30k 这三片内存,如果 10k 和 20k 这两片释放了,变为了空闲内存空间,如果下次申请的内存小于 30k,那么就可以重用这个空闲内存空间。
但是如果下次申请的内存大于 30k,没有可用的空闲内存空间,必须向 OS 申请,实际使用内存继续增大。
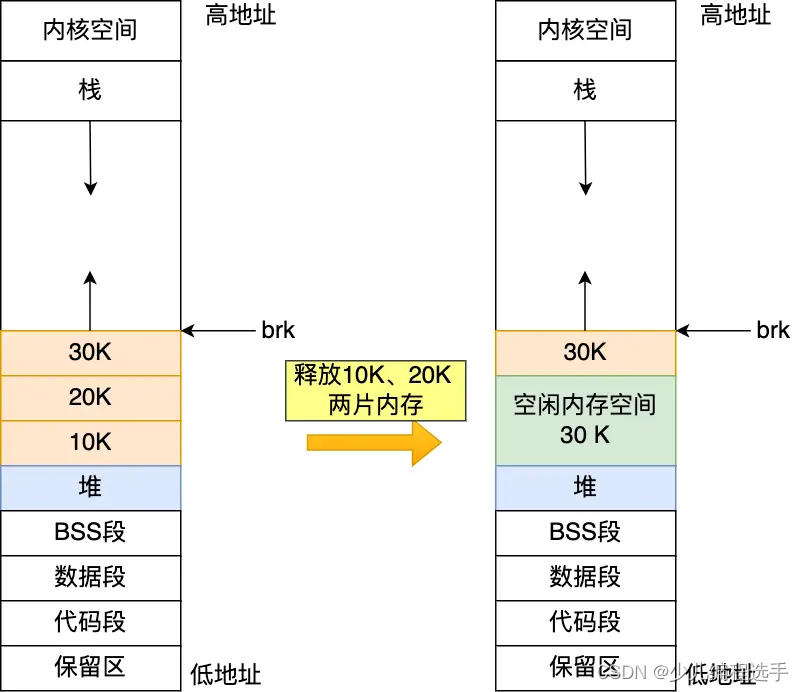
因此,随着系统频繁地 malloc 和 free ,尤其对于小块内存,堆内将产生越来越多不可用的碎片,导致“内存泄露”。而这种“泄露”现象使用 valgrind 是无法检测出来的。
所以,malloc 实现中,充分考虑了 brk 和 mmap 行为上的差异及优缺点,默认分配大块内存 (128KB) 才使用 mmap 分配内存空间。
5.5 free() 函数
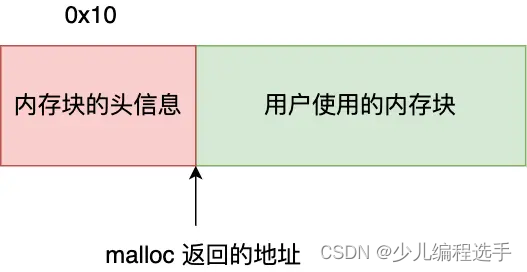
这样当执行 free() 函数时,free 会对传入进来的内存地址向左偏移 16 字节,然后从这个 16 字节的分析出当前的内存块的大小,自然就知道要释放多大的内存了,因此malloc(1)f分配的不是一字节。
6 内存满了,会发生什么?
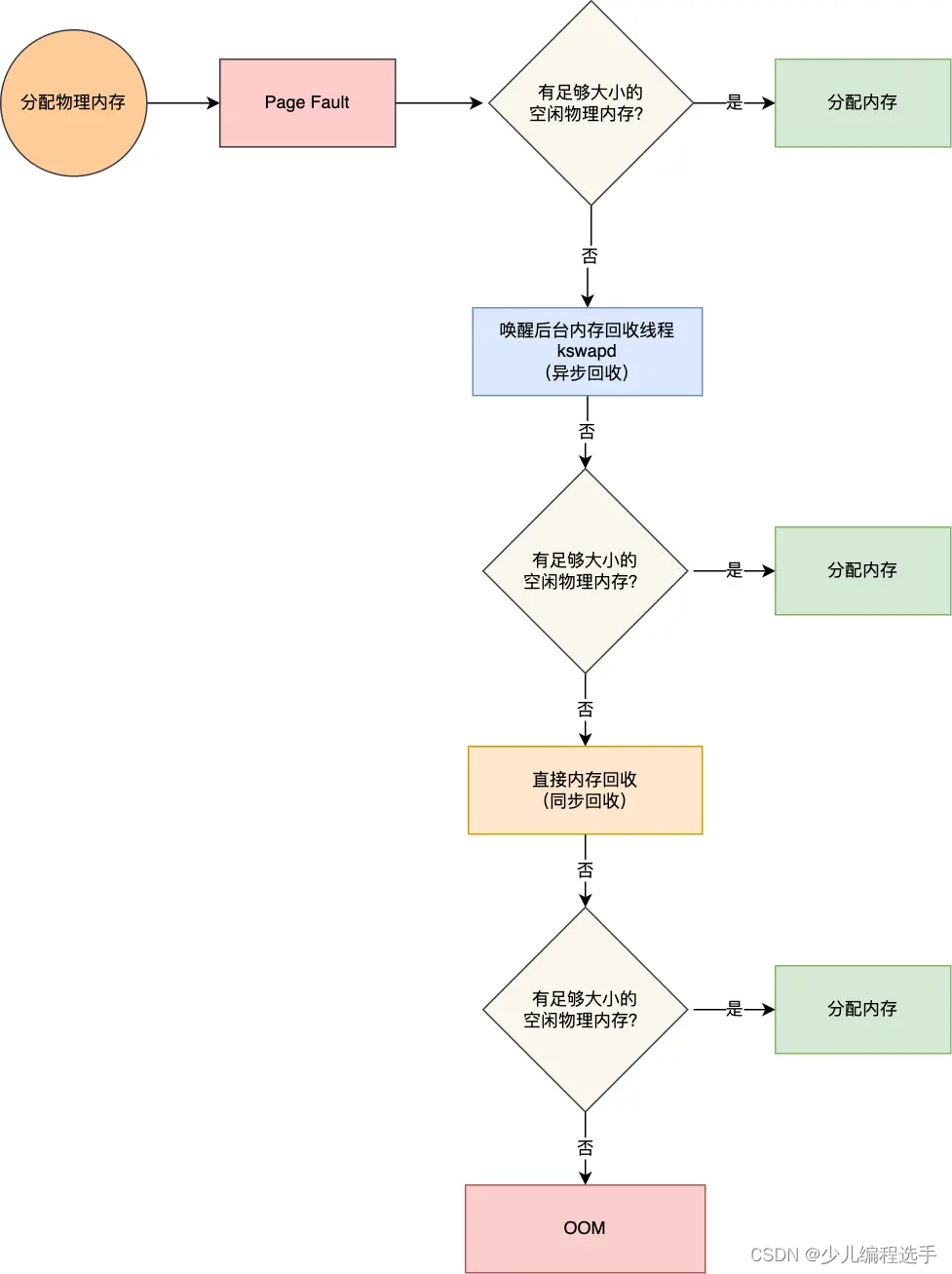
应用程序通过 malloc 函数申请内存的时候,实际上申请的是虚拟内存,此时并不会分配物理内存。当应用程序读写了这块虚拟内存,CPU 就会去访问这个虚拟内存, 这时会发现这个虚拟内存没有映射到物理内存, CPU 就会产生缺页中断,进程会从用户态切换到内核态,并将缺页中断交给内核的 Page Fault Handler (缺页中断函数)处理。
如果没有空闲的物理内存,那么内核就会开始进行回收内存的工作,回收的方式主要是两种:直接内存回收和后台内存回收。
- 后台内存回收(kswapd):在物理内存紧张的时候,会唤醒 kswapd 内核线程来回收内存,这个回收内存的过程异步的,不会阻塞进程的执行。
- 直接内存回收(direct reclaim):如果后台异步回收跟不上进程内存申请的速度,就会开始直接回收,这个回收内存的过程是同步的,会阻塞进程的执行。
如果直接内存回收后,空闲的物理内存仍然无法满足此次物理内存的申请,那么内核就会放最后的大招了 ——触发 OOM (Out of Memory)机制。
OOM Killer 机制会根据算法选择一个占用物理内存较高的进程,然后将其杀死,以便释放内存资源,如果物理内存依然不足,OOM Killer 会继续杀死占用物理内存较高的进程,直到释放足够的内存位置。
申请物理内存的过程如下图:















 972
972











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









