






第一章作业
1、列表罗列嵌入式系统常用术语(中文名、英文缩写、英文全称)
与硬件相关的术语
| 中文名 | 英文缩写 | 英文全称 |
| 封装 | Package | |
| 印刷电路板 | PCB | Printed Circuit Board |
| 模拟量 | Analog Quantity | |
| 开关量 | Switching Quantity | |
| 单列直插 | SIP | Single-in-line Package |
| 双列直插 | DIP | Dual-in-line Package |
| Z字形直插式封装 | ZIP | Zigzag-in-line Package |
| 小外形封装 | SOP | Small Outline Package |
| 紧缩小外形封装 | SSOP | Shrink Small Outline Package |
| 四方扁平封装 | QFP | Quad-Flat Package |
| 塑料薄方封装 | LQFP | Plastic-Low-profile Quad-Flat Package |
| 塑料扁平组件式封装 | PFP | Plastic Flat Package |
| 插针网格阵列封装 | PGA | Ceramic Pin Grid Array Package |
| 球栅阵列封装 | BGA | Ball Grid Array Package |
| 动态可读写随机存储器 | DRAM | Dynamic Random Access Memory |
| 静态可读写随机存储器 | SRAM | Static Random Access Memory |
| 只读存储器 | ROM | Read Only Memory |
与通信相关的术语
| 中文名 | 英文缩写 | 英文全称 |
| 并行通信 | Parallel Communication | |
| 串行通信 | Serial Communication | |
| 串行外行接口 | SPI | Serial Peripheral Interface |
| 集成电路互联总线 | I2C | Integrated Circuit Internet Bus |
| 通用串行总线 | USB | Universal Serial Bus |
| 控制器局域网 | CAN | Controller Area Network |
| 边界扫描测试协议 | JTAG | Joint Test Action Group |
| 串行线调试技术 | SWD | Serial Wire Debug |
与功能模块相关的术语
| 中文名 | 英文缩写 | 英文全称 |
| 通用输入/输出 | GPIO | General Purpose I/0 |
| 模数转换 | ADC | Analog to Digital Convert |
| 数模转换 | DAC | Digital to Analog Convert |
| 脉冲宽度调制器 | PWM | Pulse Width Modulator, |
| 看门狗 | Watch Dog | |
| 液晶显示 | LCD | Liquid Crystal Display |
| 发光二极管 | LED | Light Emitting Diode |
| 键盘 | Keyboard |
2、运行示例程序
打开环境,导入工程
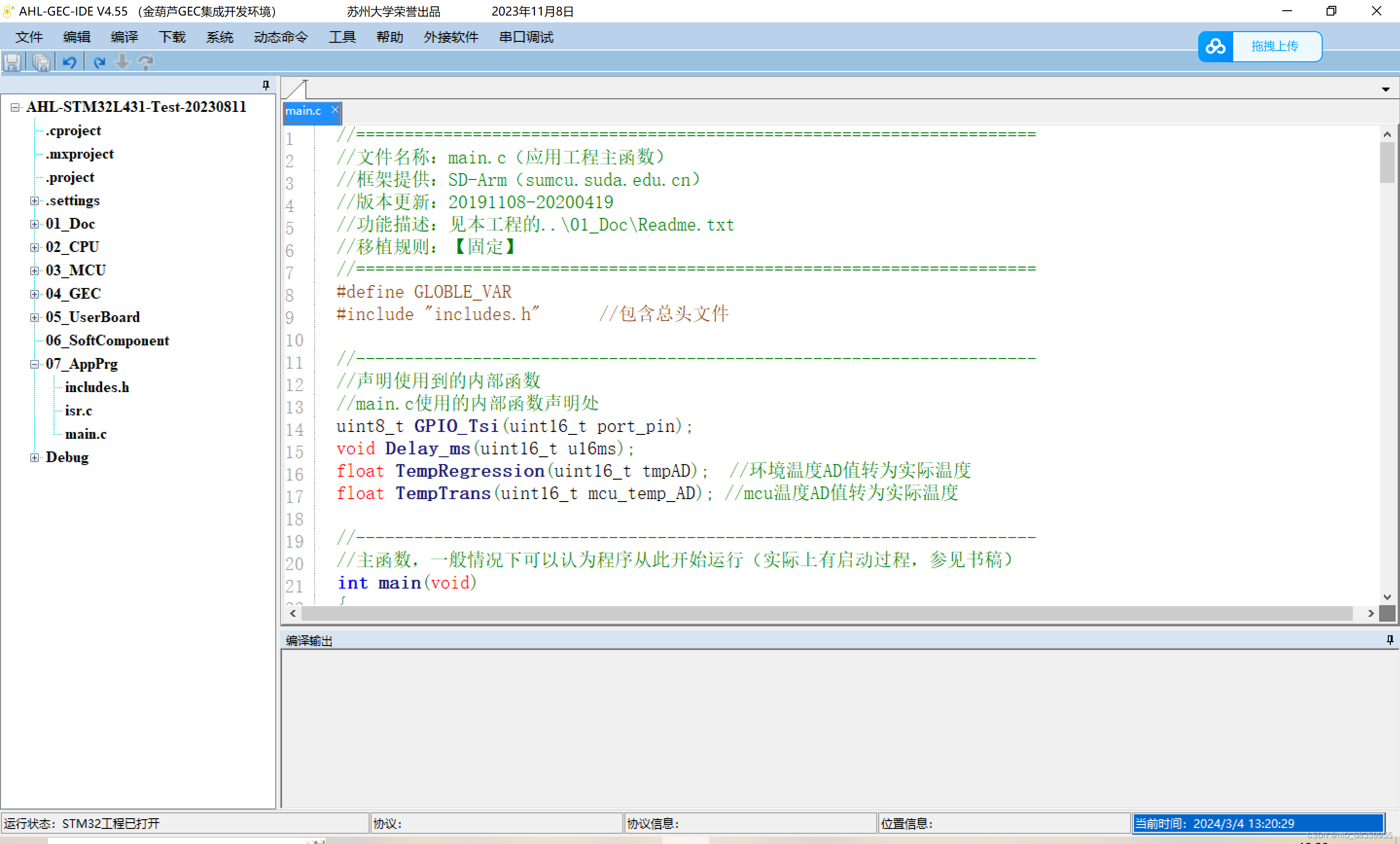
成功编译工程

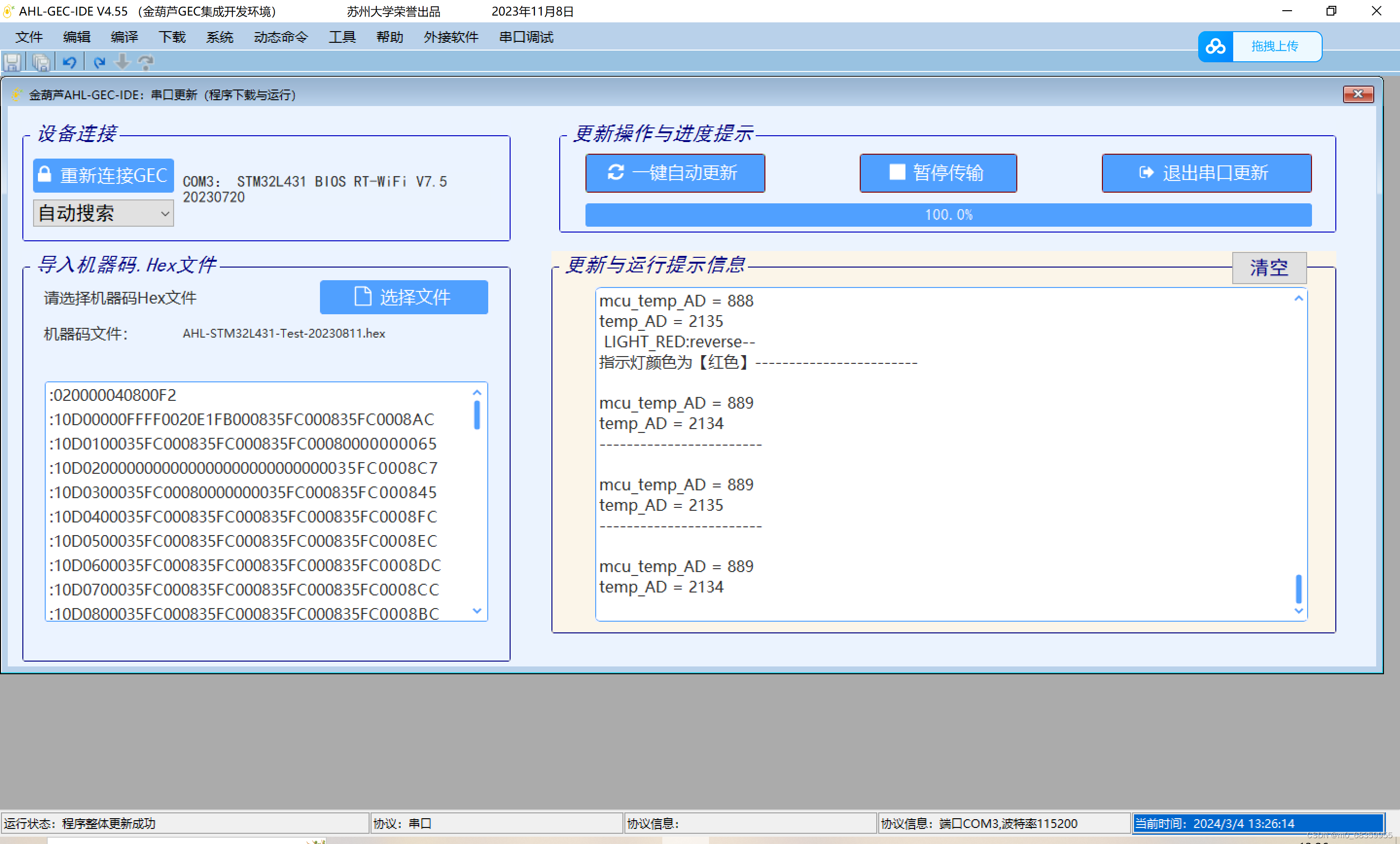
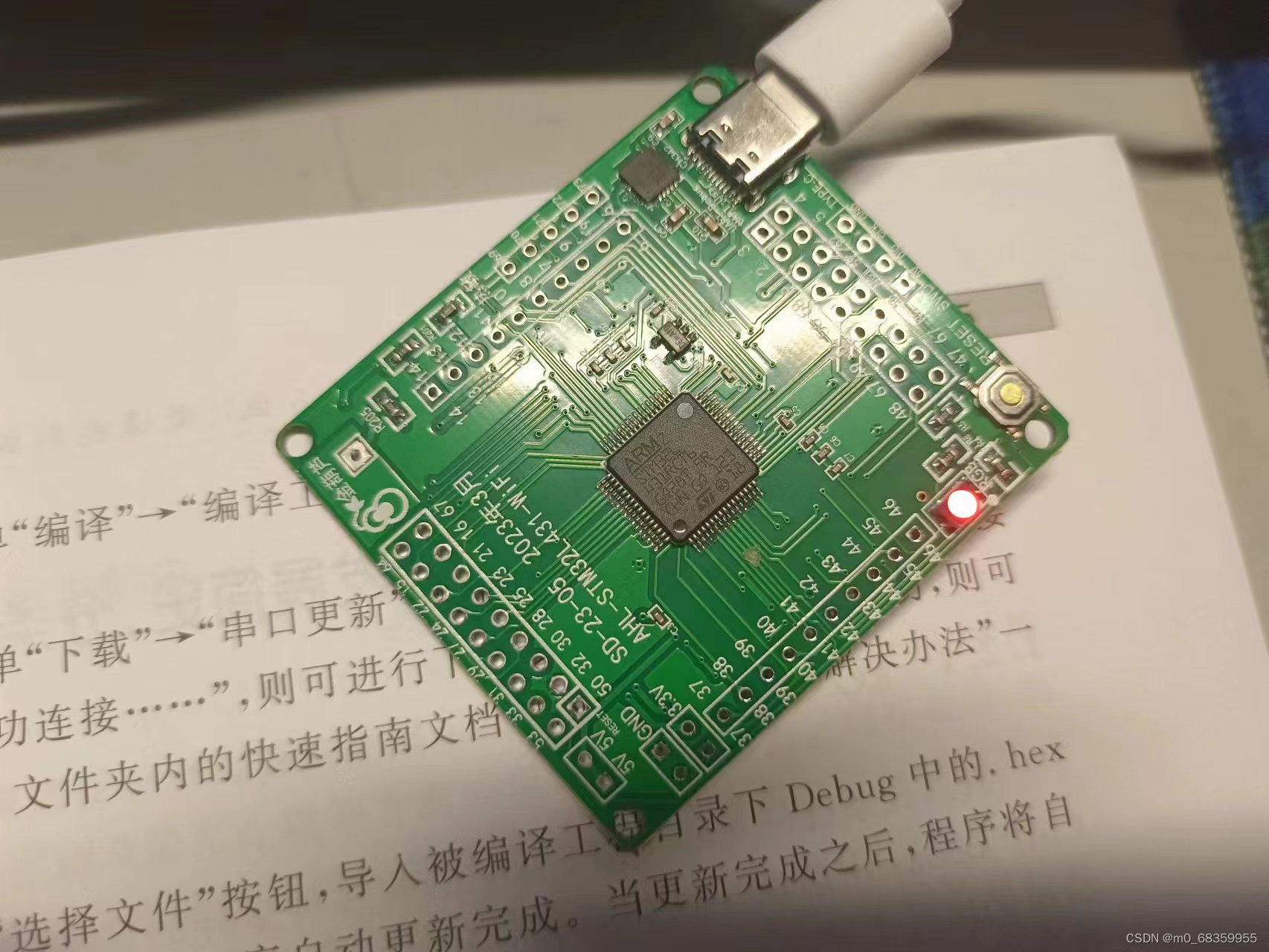
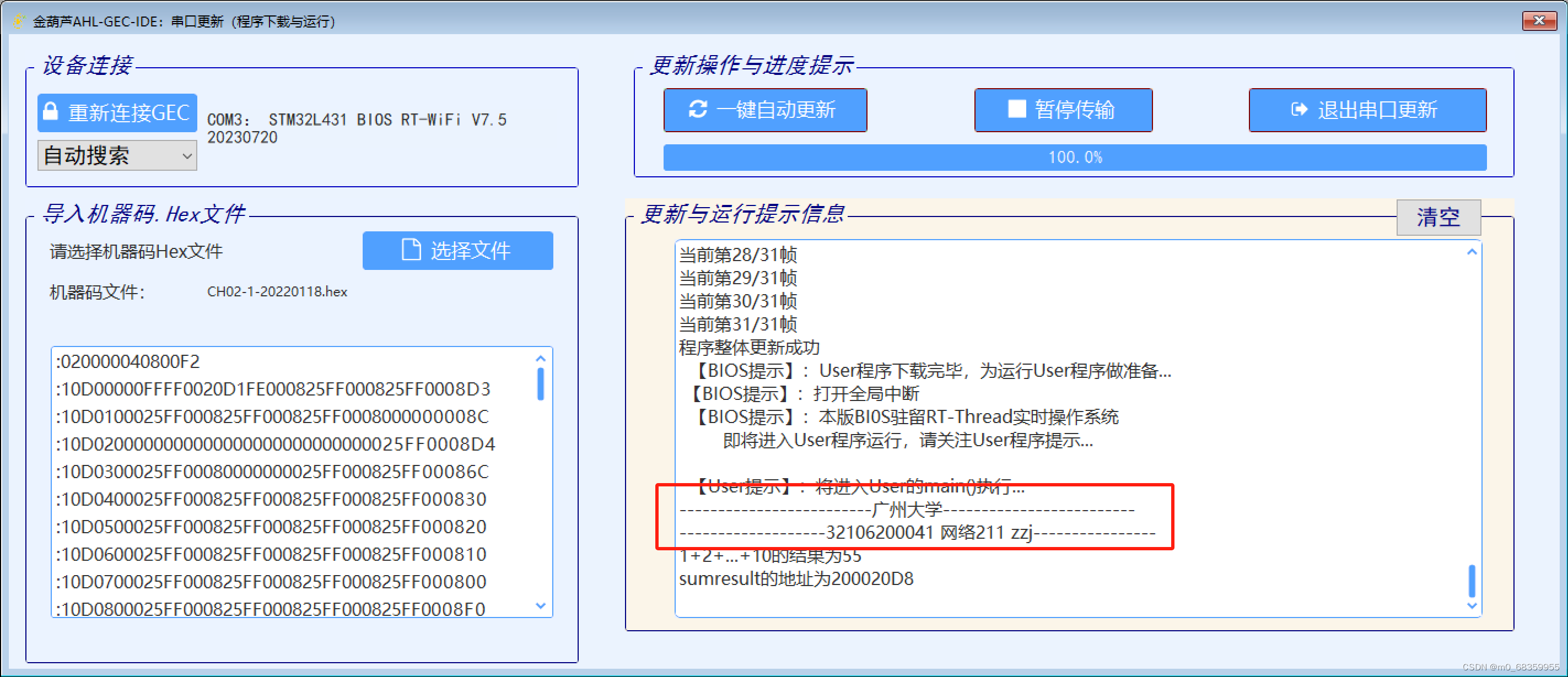
成功连接GEC并下载机器码,完成自动更新,同时指示灯运作正常
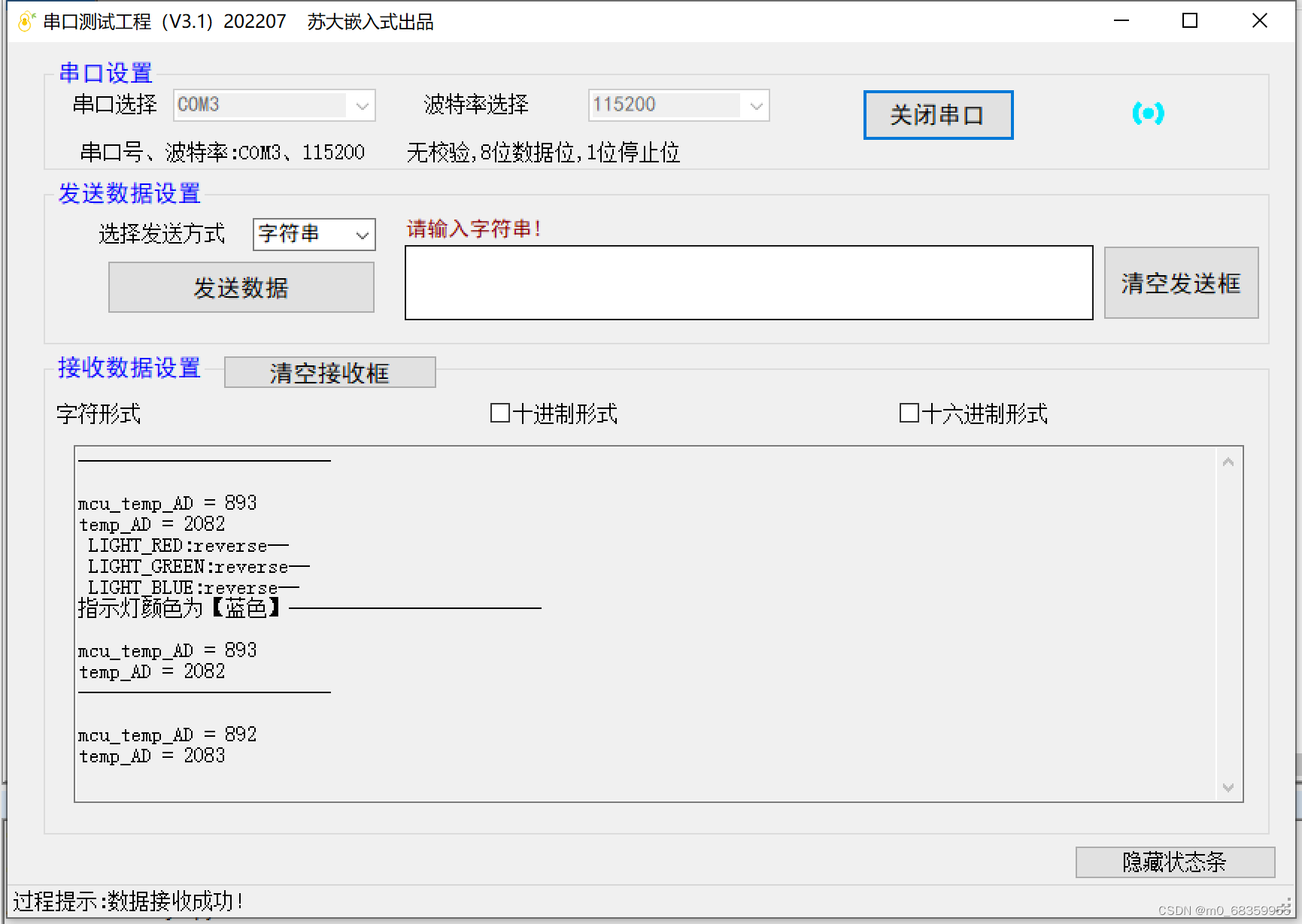
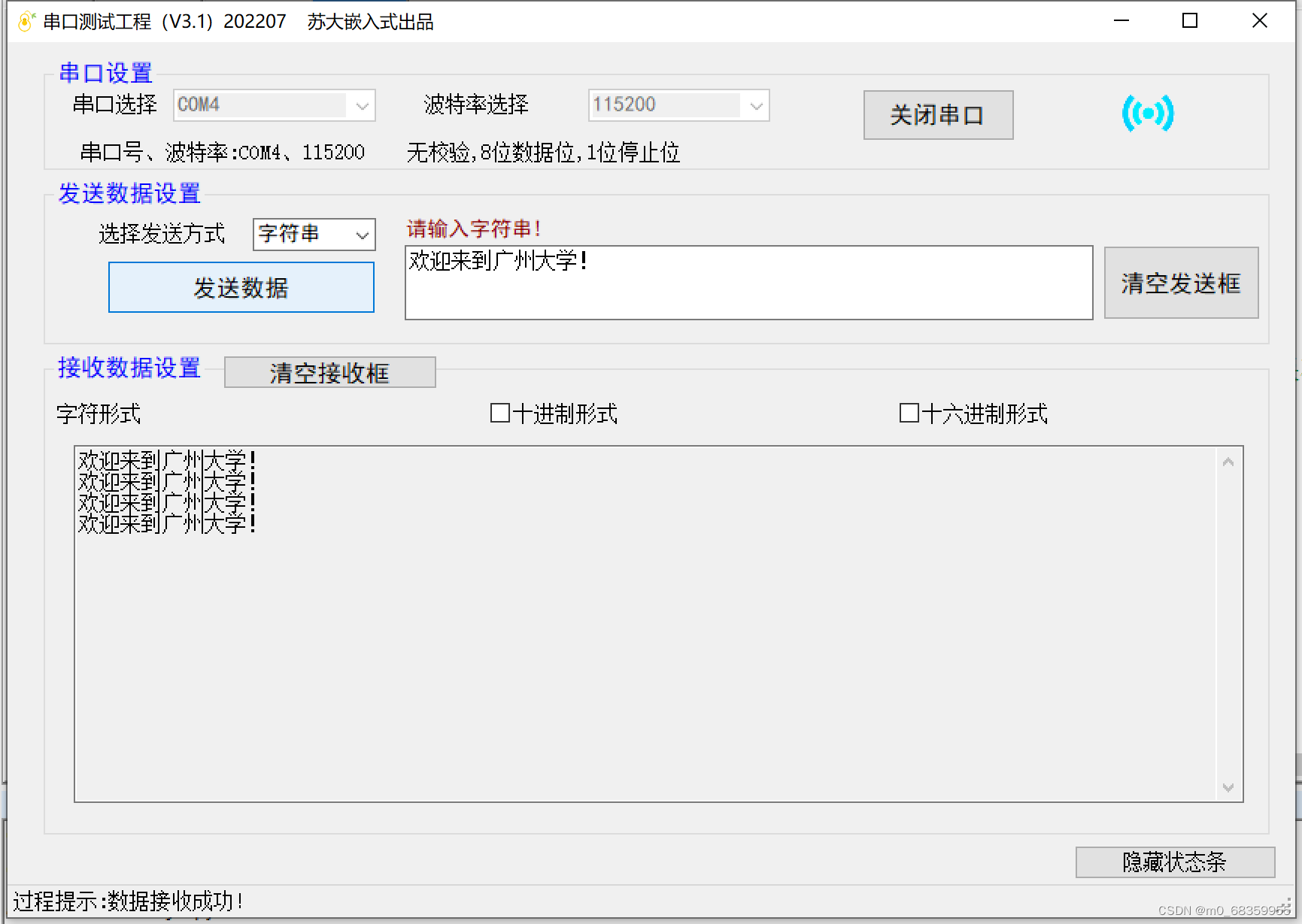
观察程序运行过程,并验证串口收发
第二章作业
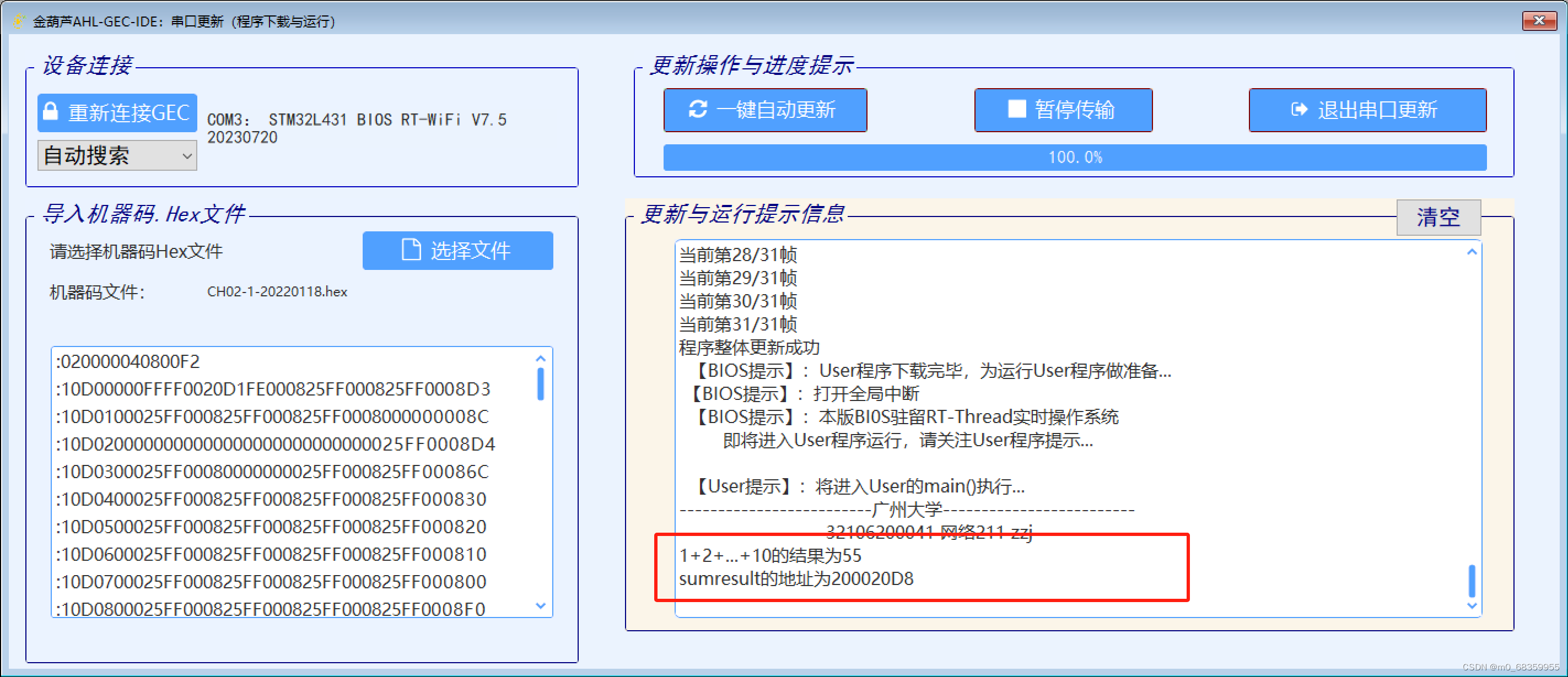
打开04-Software/ch02/CH02-1-20220118工程目录,
编译下载运行,理解并学习main.s汇编源文件。
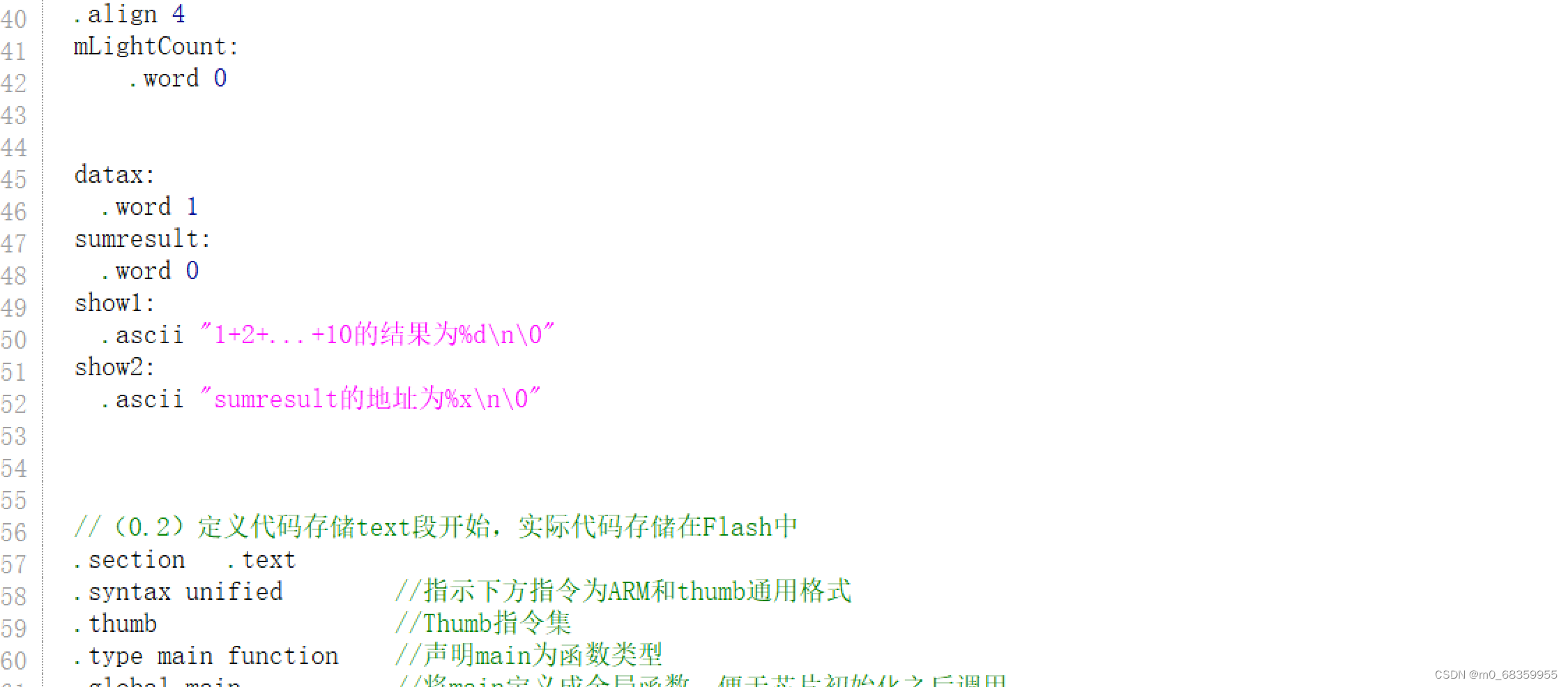
修改main.s源文件,增加以下内容:
· 1、在第一行显示"广州大学"字样。
· 2、编写一个1+2+…+10的程序,将求和结果存入名为
"sumresult"的内存单元中,并将求和结果、sumresult
的地址用printf显示出来。
注:建议在源程序中"main_loop:"语句之前的地方增加,结束时用"bl."停住。
printf的格式详见05 UserBoard/printf.h文件。
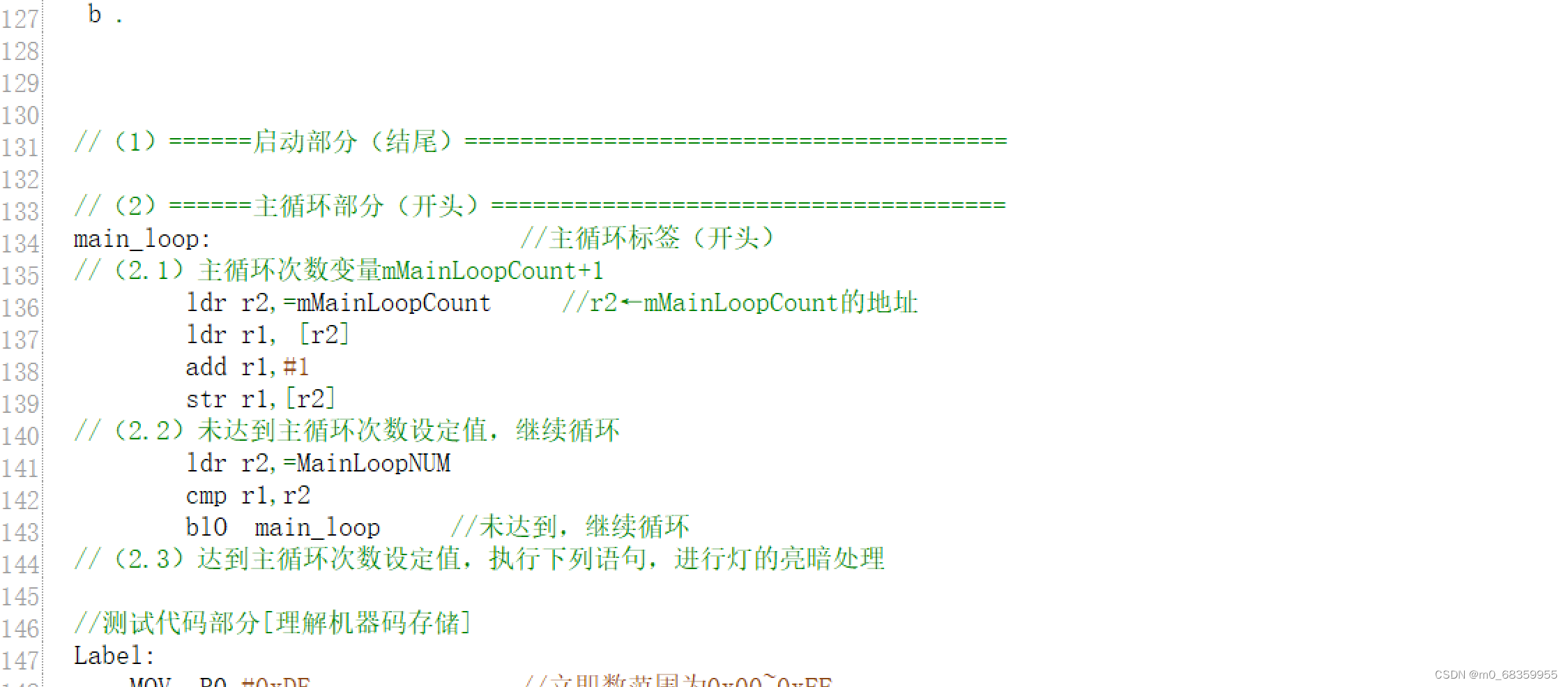
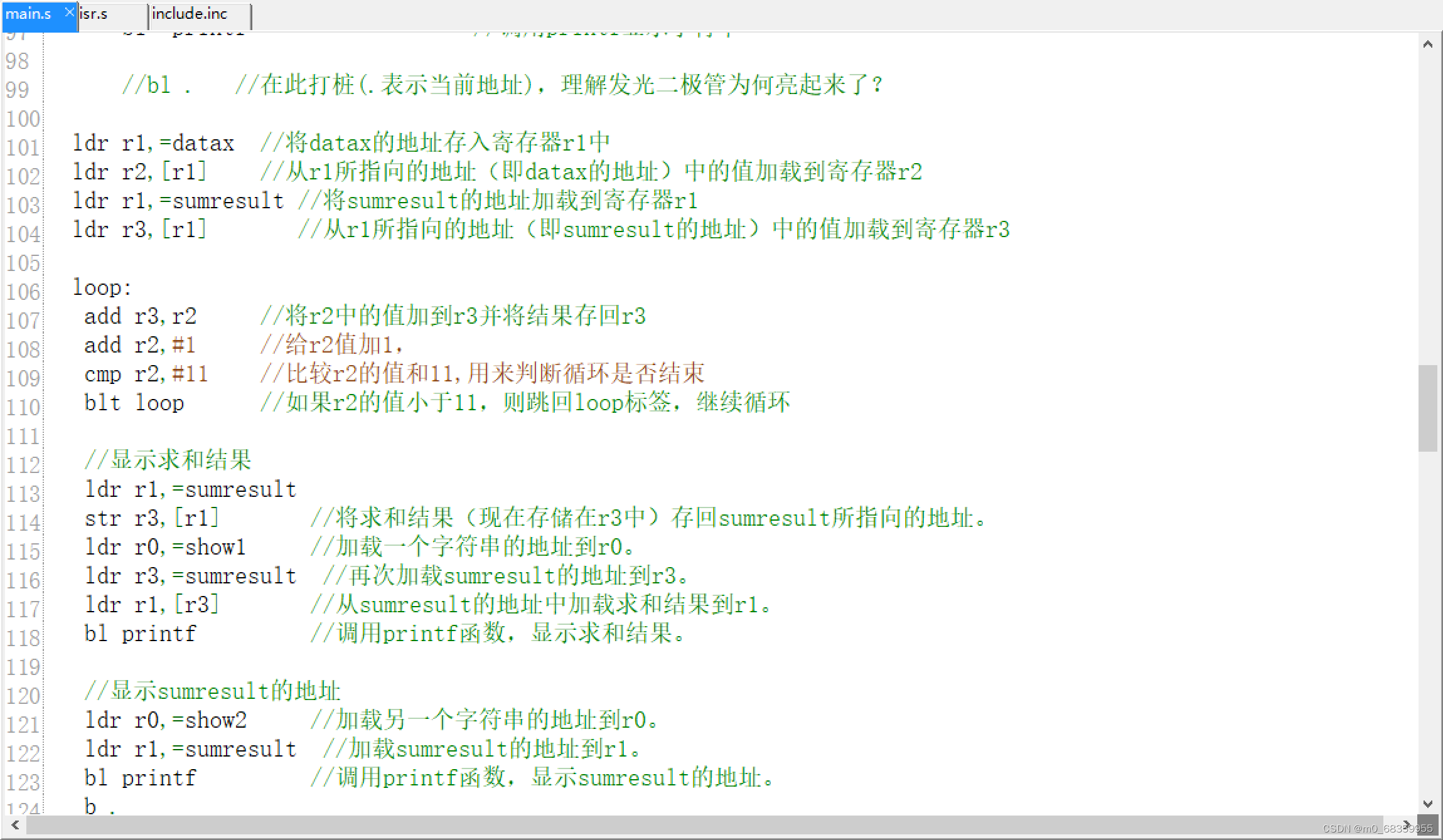
1. 写出main.s中94~101行语句的C语言描述。
汇编代码
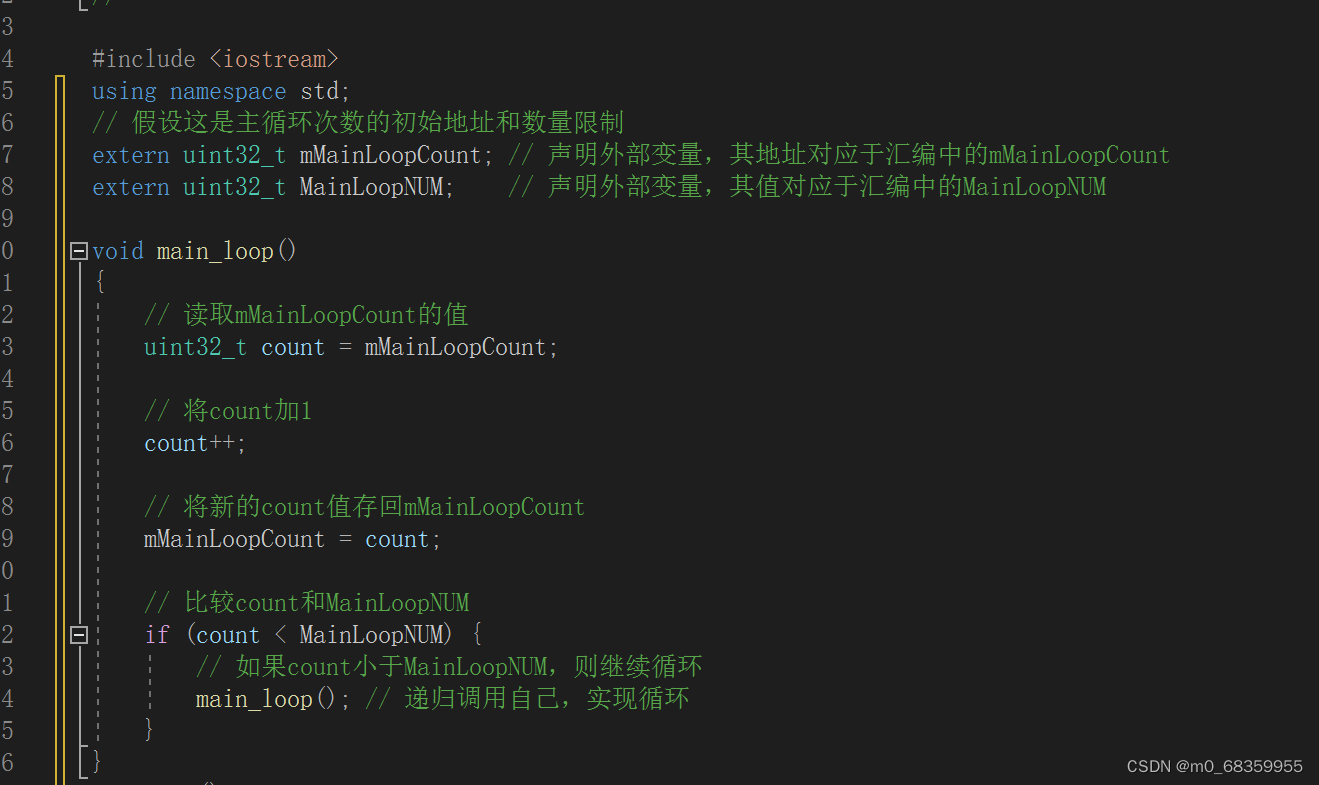
C语言代码
2、修改main.s源文件,增加以下内容:
1、在第一行显示"广州大学"字样。

2、编写一个1+2+…+10的程序,将求和结果存入名为"sumresult"的内存单元中,并将求和结果、sumresult的地址用printf显示出来。
定义需要使用的数据输出格式,使用的变量及输出的字符串

通过ldr命令将初始的datax的值以及sumresult的值存入到r2和r3中,编写loop循环,通过add命令使得r2的值增加,并依次将和存入r3中,通过比较r2和11的值判断循环是否结束,然后通过str命令将求和结果存回sumresult所指的地址,最后通过printf函数显示
第三章作业
1、对照命名格式,给出所用MCU芯片型号标识所获得的信息。
STM32系列芯片所使用的命名格式为STM32 X AAA Y B T C
本书使用的芯片型号为STM32L431RCT6,即属于32位的MCU,超低功耗型,高性能微控制器,引脚数为64,Flash大小为256KB,封装形式为64引脚LQFP封装,工作范围为-40℃~+85℃。
2、给出所用MCU芯片的RAM及Flash大小、地址范围
STM32L4片内Flash大小为256KB,其地址范围是0x0800_0000~0x0803_FFFF,扇区大小为2KB,扇区共128个。
STM32L4片内RAM为静态随机存储器(SRAM),大小为64KB,分成SRAM1和SRAM2,地址范围分别是0x2000_0000~0x2000_BFFF(48KB)和0x2000_C000~0x2000_FFFF(16KB),片内RAM一般用来存储全局变量、静态变量、临时变量等。大部分编程将其连续在一起使用,即地址范围是0x2000_0000~0x2000_FFFF,共64KB。
第四章作业
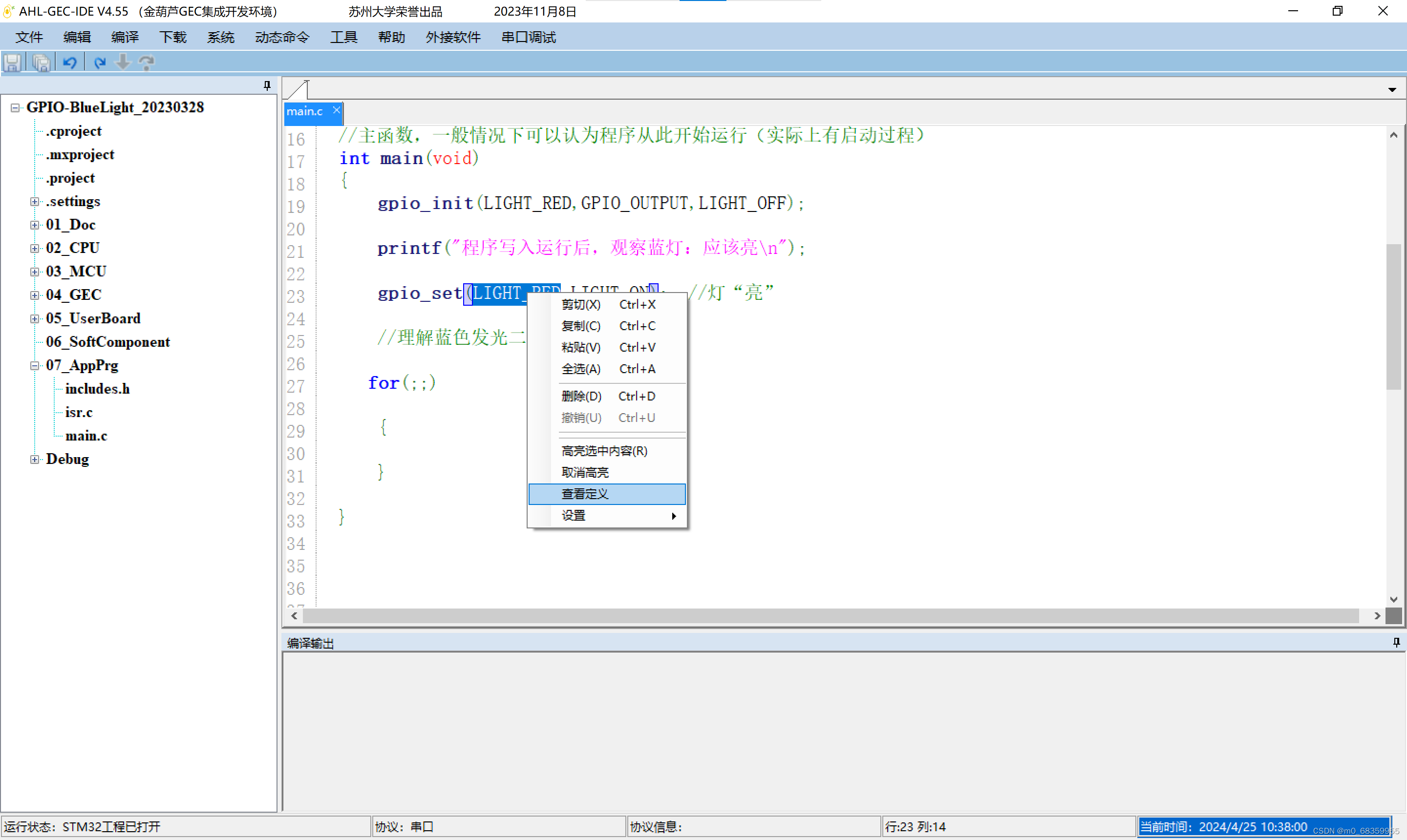
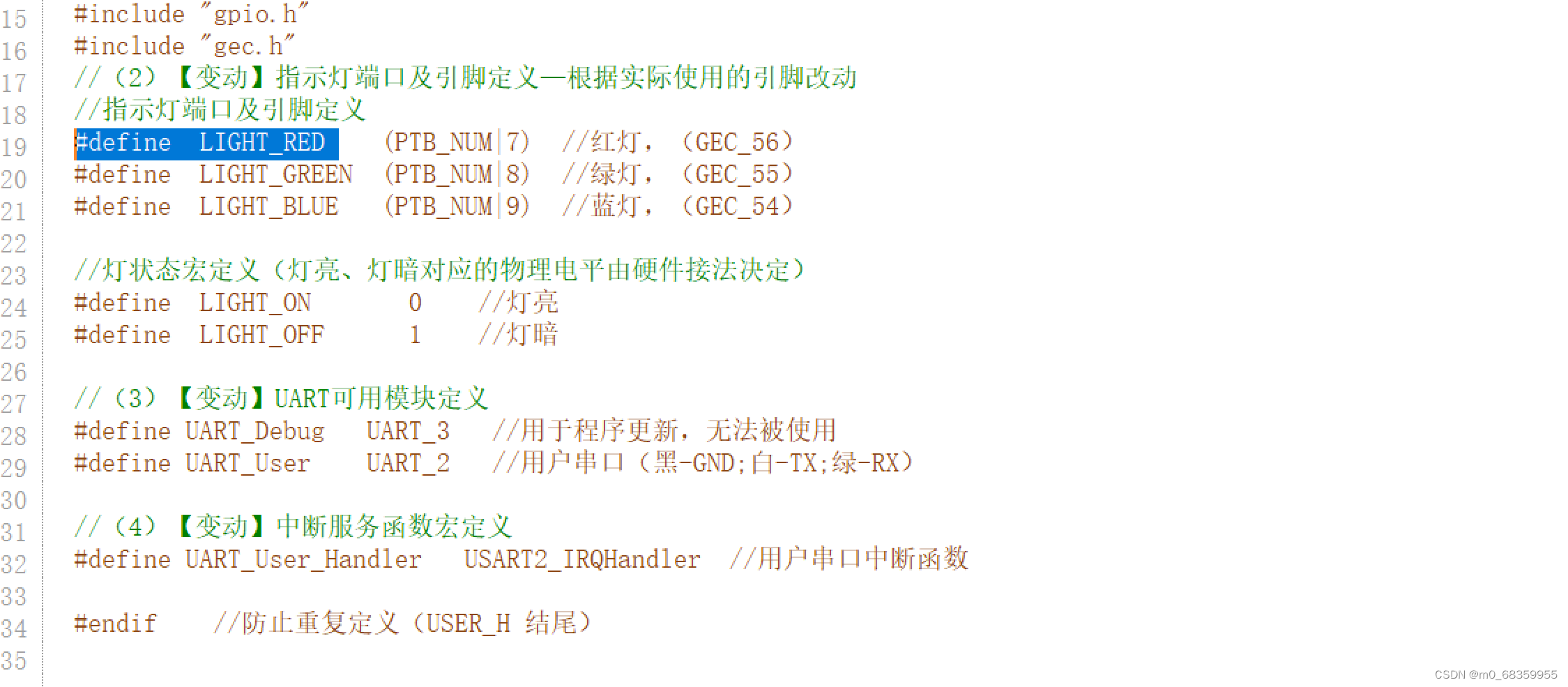
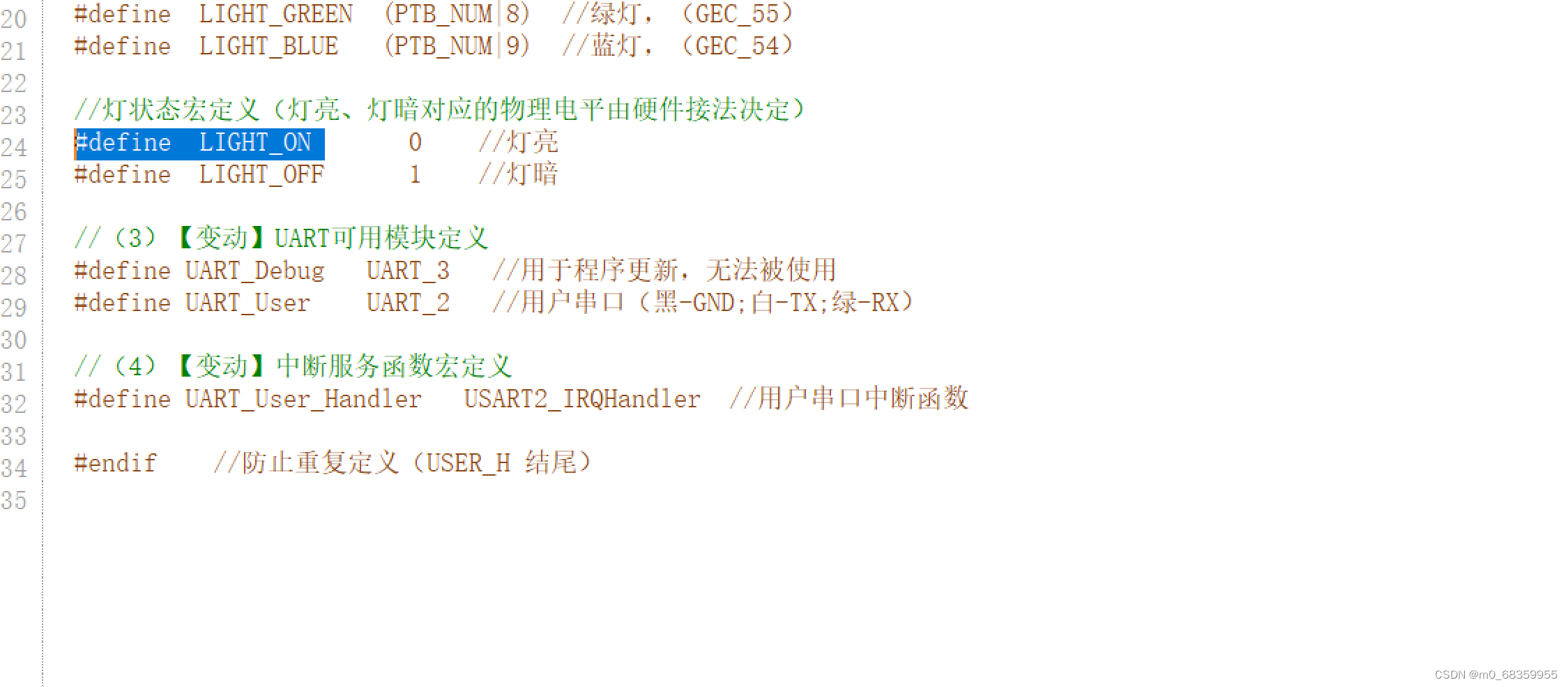
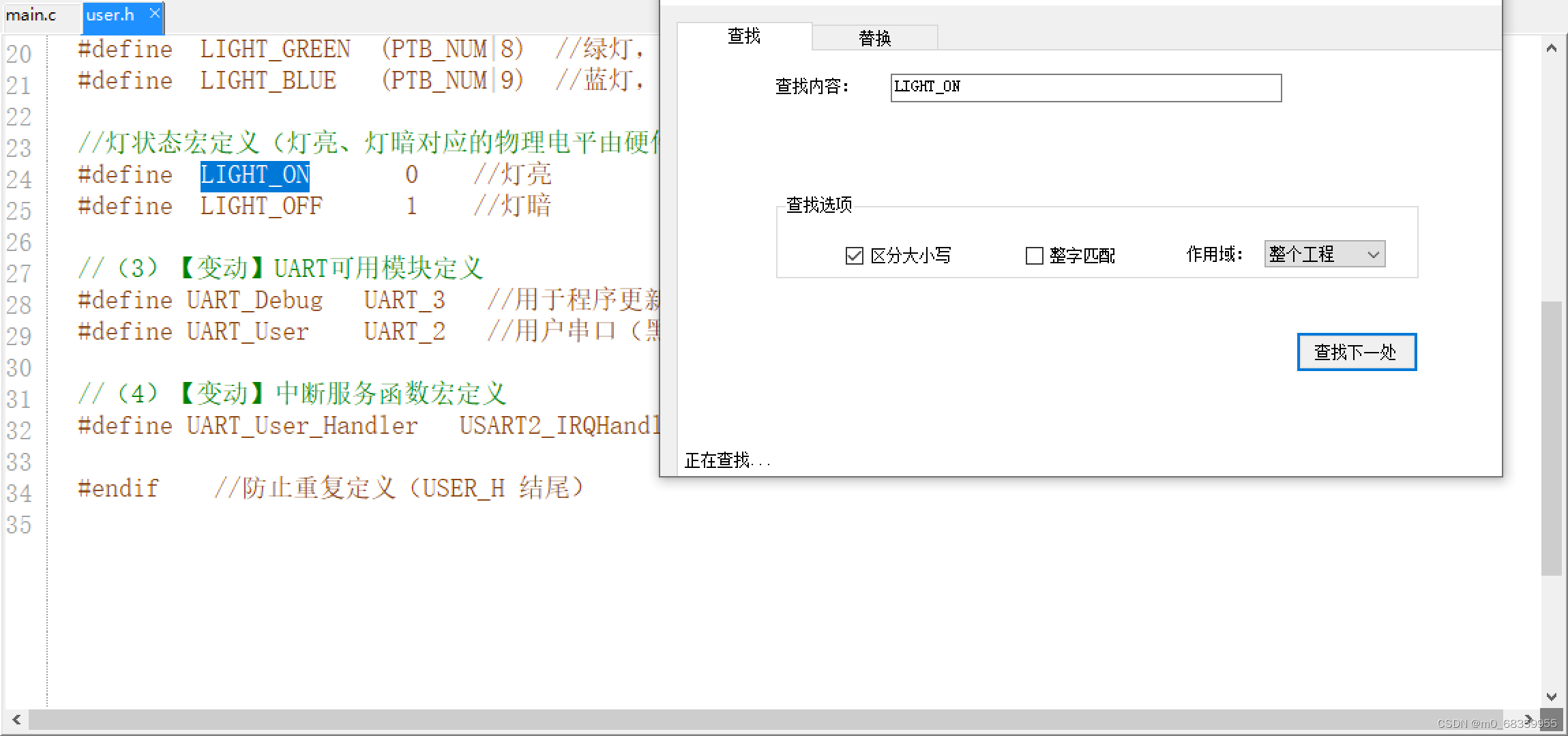
1.给出 gpio set(LIGHT RED,LIGHT OFF);语句中LIGHT RED和LIGHT OFF的值是多少?贴出每一步的查找截图
方法一:点击右键查看定义直接查找
方法二:通过工具栏中“编辑”->“查找和替换”->”文件查找/替换“可打开查找窗口进行查找

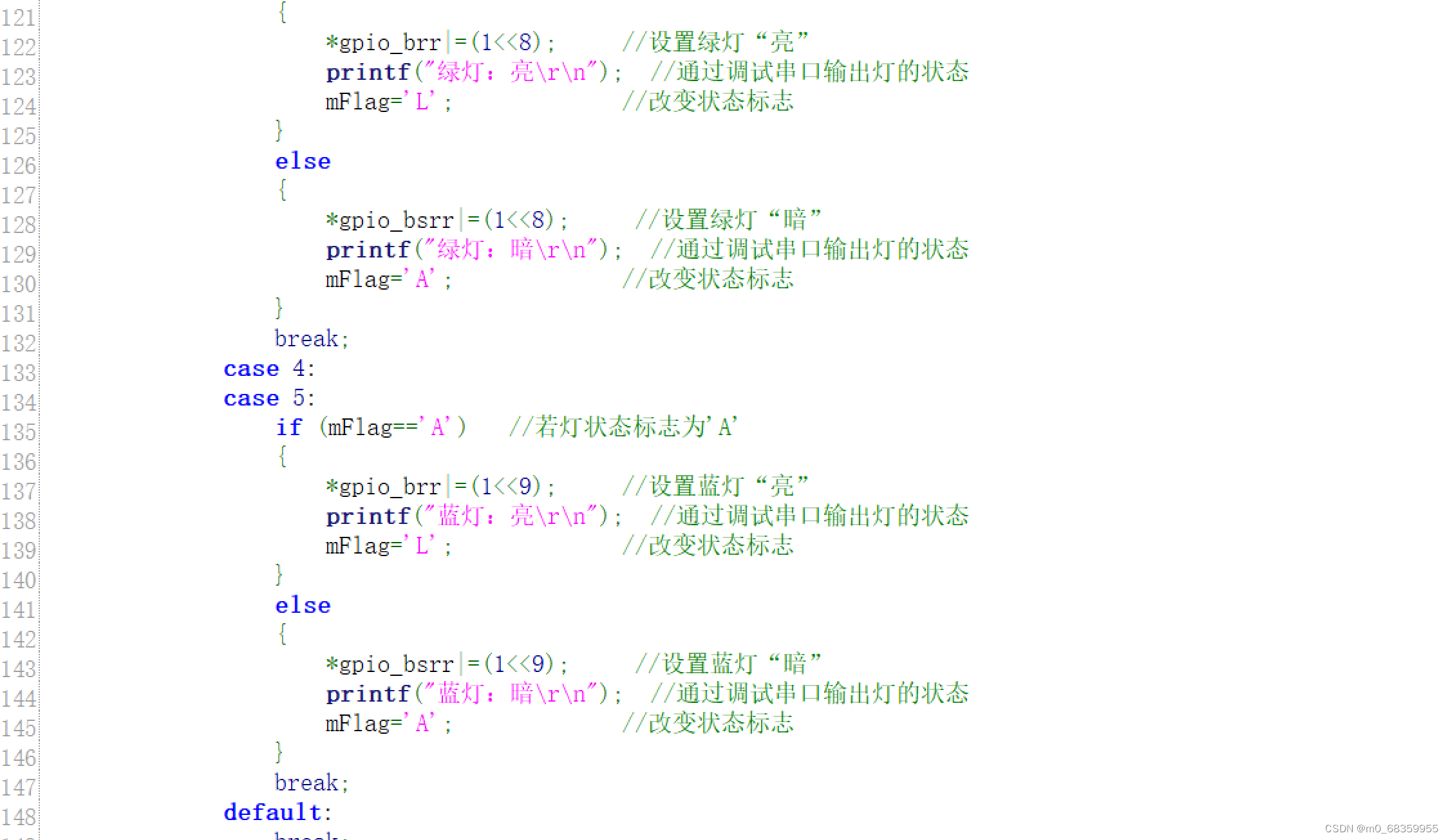
2.用直接地址编程方式,实现红绿蓝三灯轮流闪烁
将D19,D18设置为01,即设定9号针脚为输出模式,即蓝灯所连接的针脚
将D17,D16设置为01,即设定8号针脚为输出模式,即绿灯所连接的针脚
将D15,D14设置为01,即设定7号针脚为输出模式,即红灯所连接的针脚
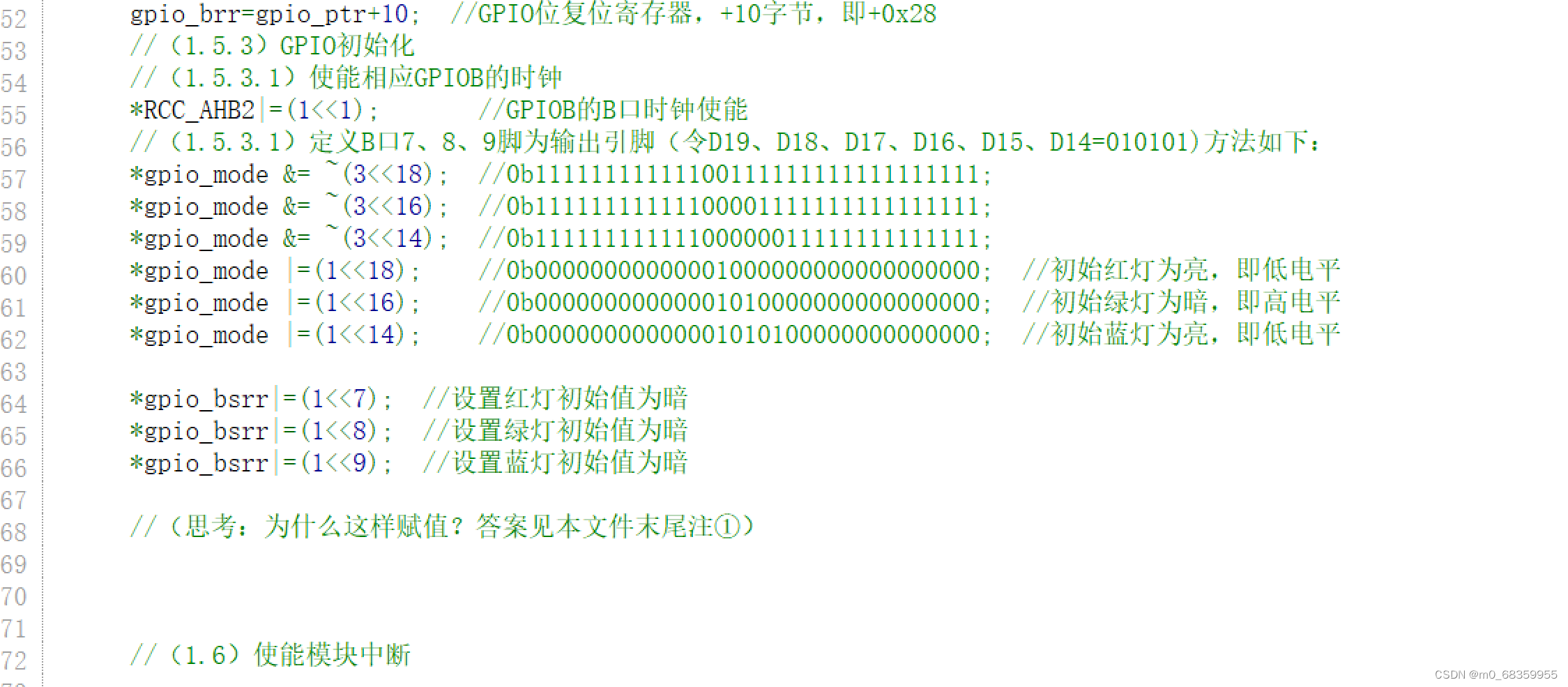 将D9,D8,D7设置为1,即可设置蓝灯,绿灯,红灯对应的引脚为低电平,即设置灯为“亮”
将D9,D8,D7设置为1,即可设置蓝灯,绿灯,红灯对应的引脚为低电平,即设置灯为“亮”

将D9,D8,D7设置为1,即可设置蓝灯,绿灯,红灯对应的引脚为高电平,即设置灯为“暗”

蓝灯和绿灯执行相同操作
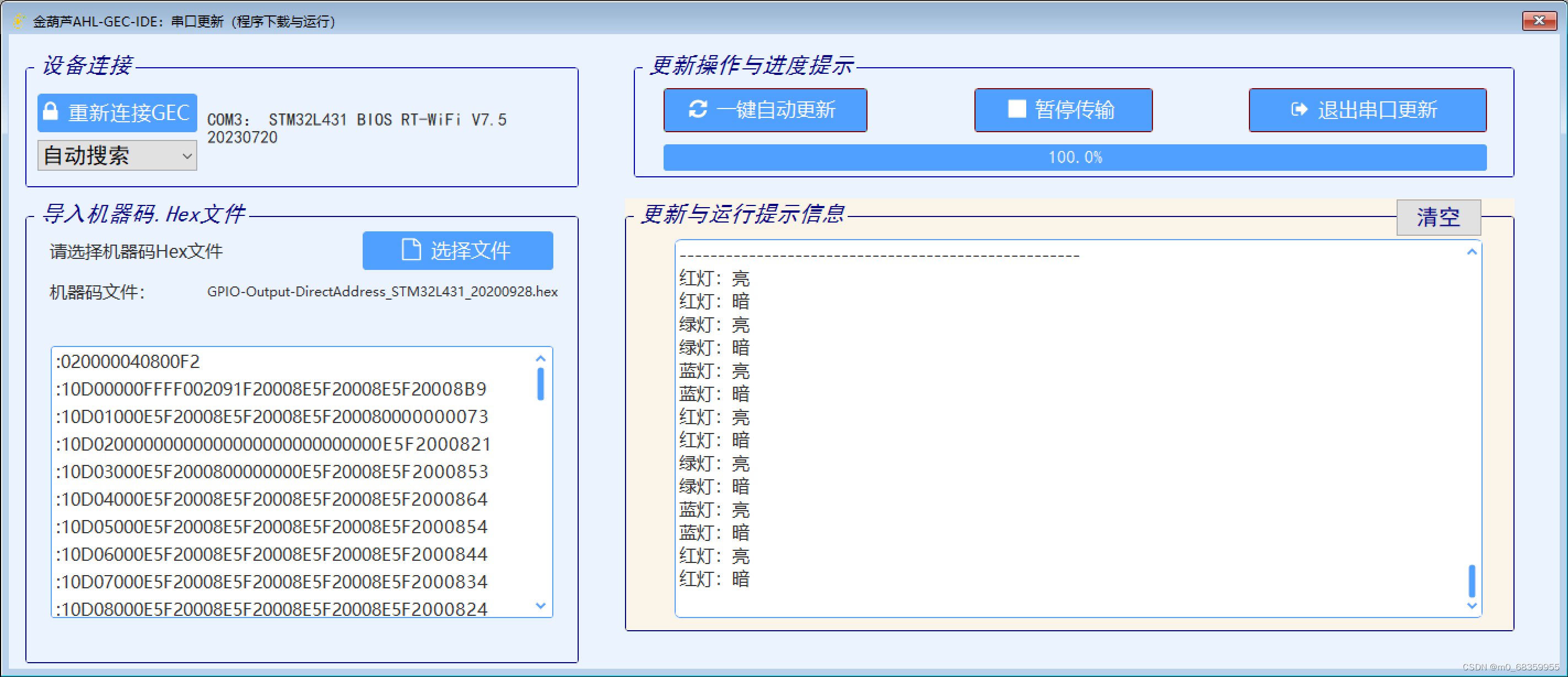
运行结果
3.用调用构件的方式,实现红绿蓝的八种组合轮流闪烁
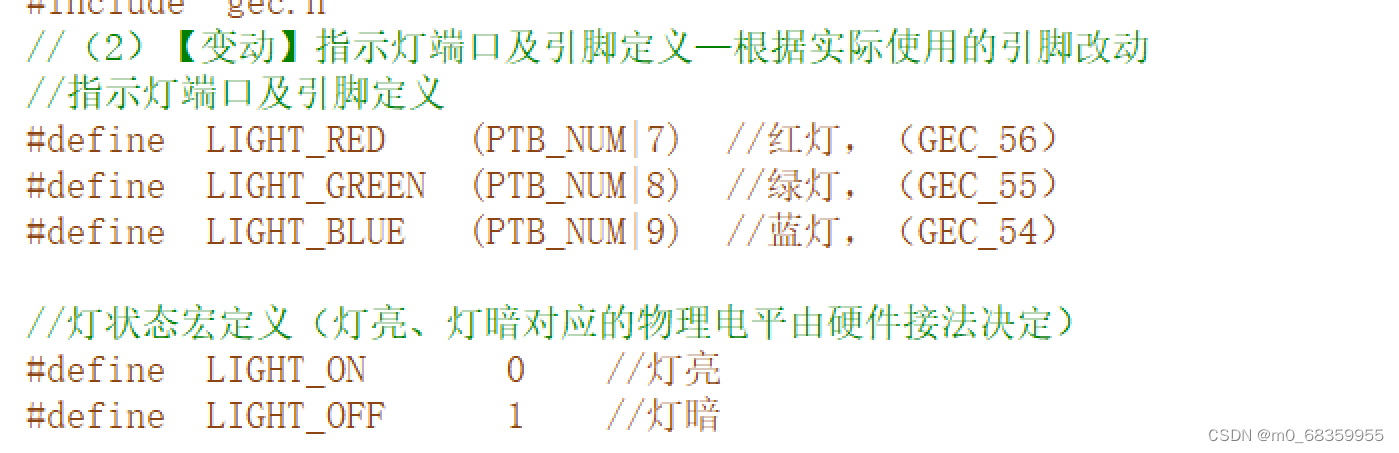
引脚定义
初始化红绿蓝灯,并设置初始状态为灯亮

使用gpio_set函数设置灯的状态

运行结果

第六章作业
1、编写UART_2串口发送程序时,初始化需要设置哪些参数?
(1)设置引脚复用功能为串口。通过GPIO模块的端口模式寄存器(GPIOA_MODER)设定为引脚为复用功能模式;通过GPIO复用功能低位寄存器(GPIOA_AFRL)设定为UARTx_TX和UARTx_RX。
(2)设置波特率。通过UART波特率寄存器(UART_BRR)设定使用什么速度收发字节。
(3)开启UART功能。通过UART控制寄存器(UART_CR1,UART_CR2和UART_CR3)开启UART功能,启动串口发送与接收功能。
2、假设速度为115200,系统时钟为72MHz,波特率寄存器BRR中的值应该是多少?
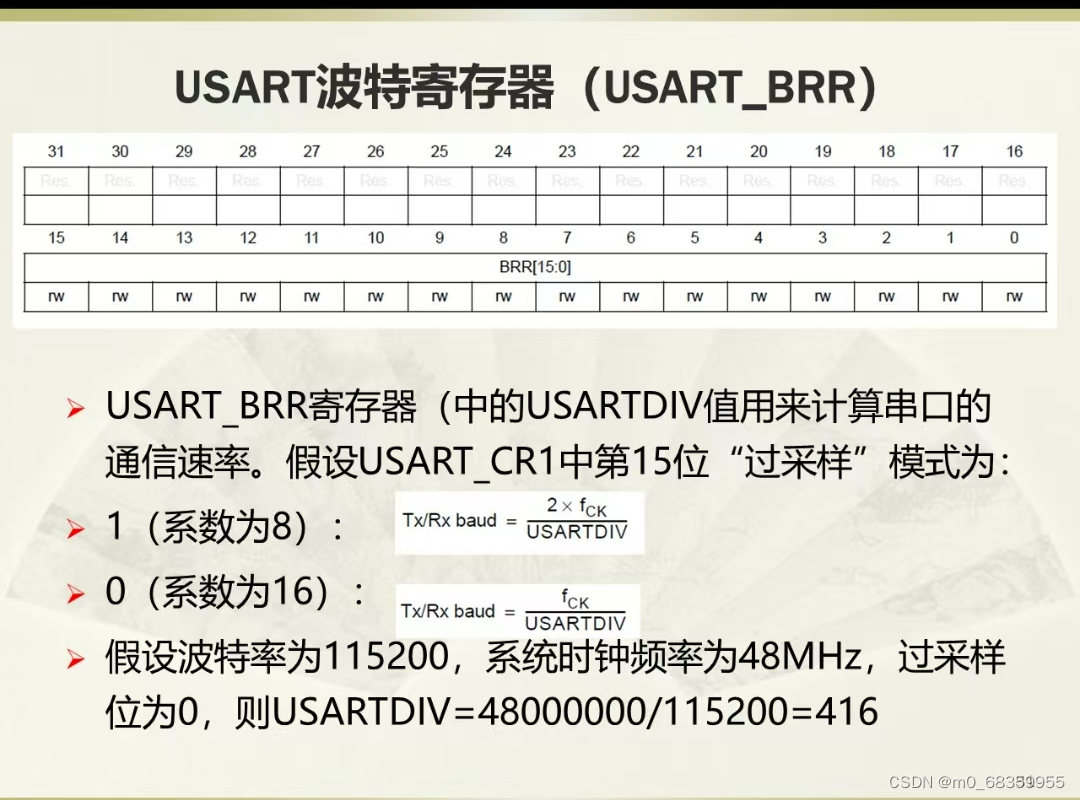
- 过采样因子为8:USARTDIV = 2*72MHz / 115200 = 1250
- 过采样因子为16:USARTDIV = 72MHz / 115200 = 625
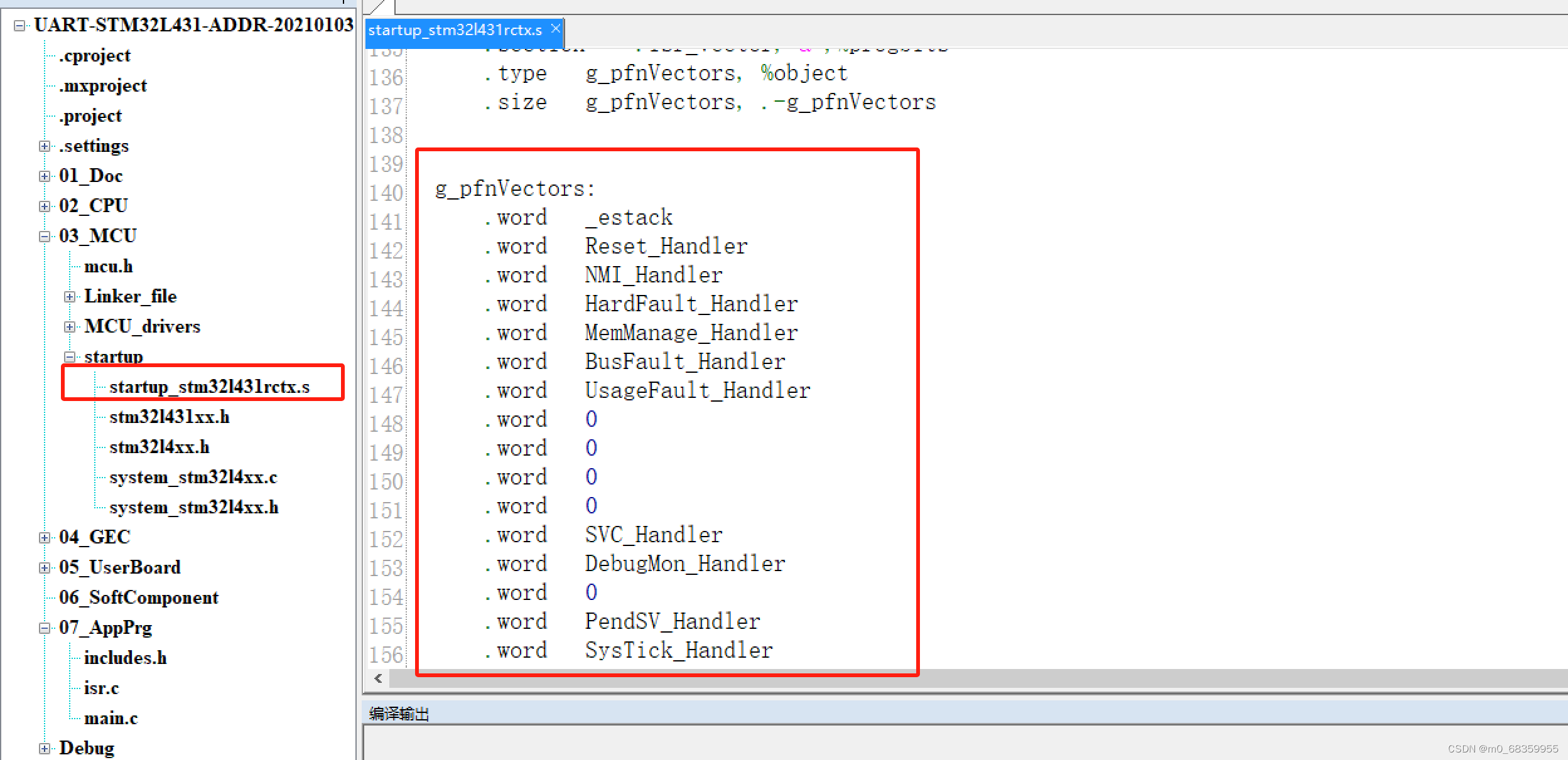
3、中断向量表在哪个文件中?表中有多少项?给出部分截图。
中断向量表存放在 startup_stm32|431rctx.s中
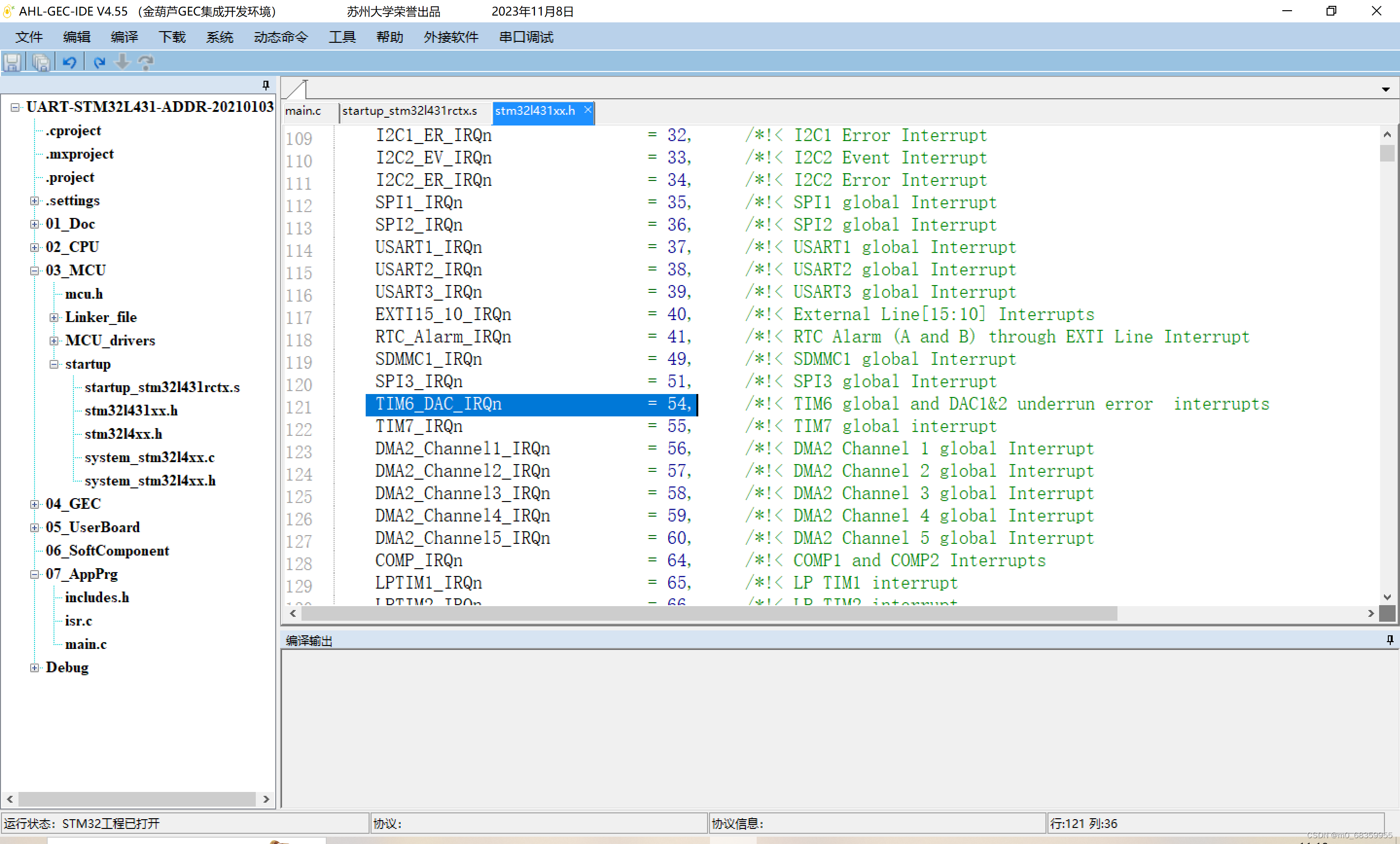
4 、以下是中断源使能函数,假设中断源为TIM6,将函数实例化 (写出各项具体数值)
找到TIM6中断号为54
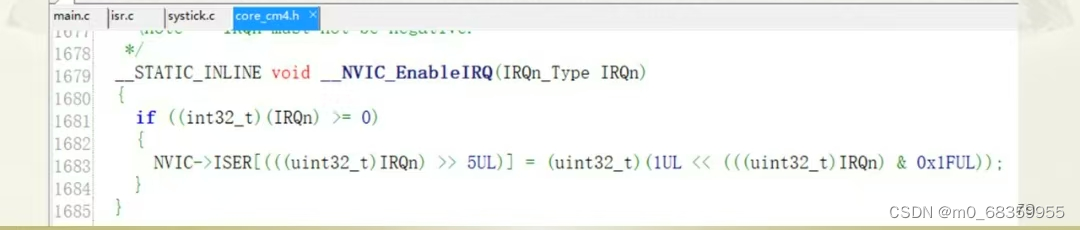
当IRQn=54,是大于0的,进入if条件语句,
ISER[(((uint32_t)IRQn) >> 5UL)]是将54右移5位,实际上是整除32,54>>5 == 1,所以NVIC->ISER[1],
((uint32_t)IRQn) & 0x1FUL)是保留54的低5位,十进制是22,1UL<<22是将1左移22位,
然后把这个结果赋值给NVIC->ISER[1]。所以最后是NVIC->ISER[1]的第22位设为1,从而使得中断号为54的中断被使能。
5、 假设将UART_2和TIM6交换其在中断向量表中的位置和IRQ号,UART_2可以正常中断吗?
不能,每一个中断在向量表中都有一个唯一的中断号(IRQ号),这个IRQ号用于在向量表中定位对应的中断服务函数,将UART_2和TIM6在中断向量表中的位置和IRQ号进行交换,那么在代码中相应的中断处理程序可能会被错误地调用,因为中断向量表中的位置和IRQ号是与特定的外设和中断服务函数相关联的。
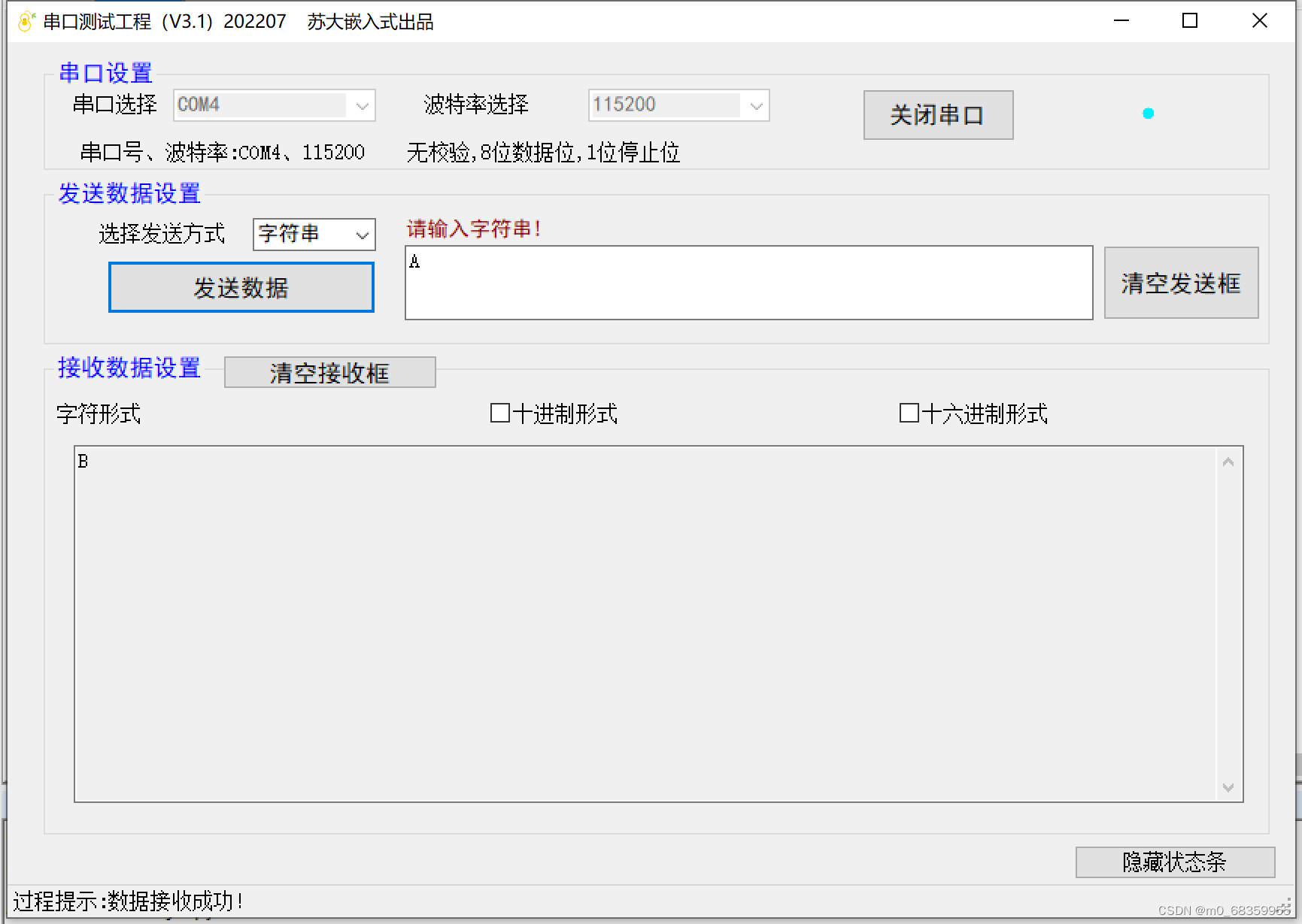
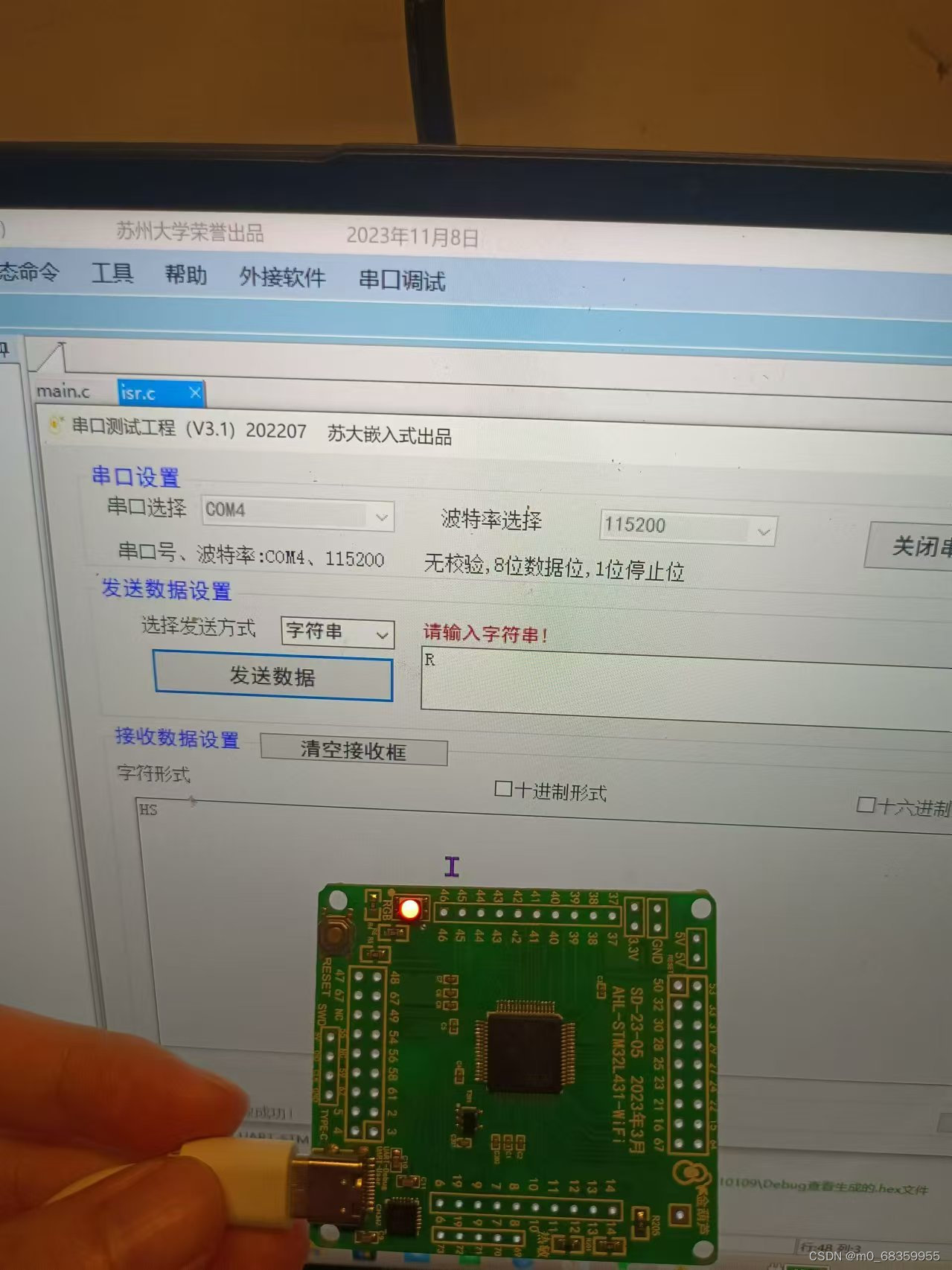
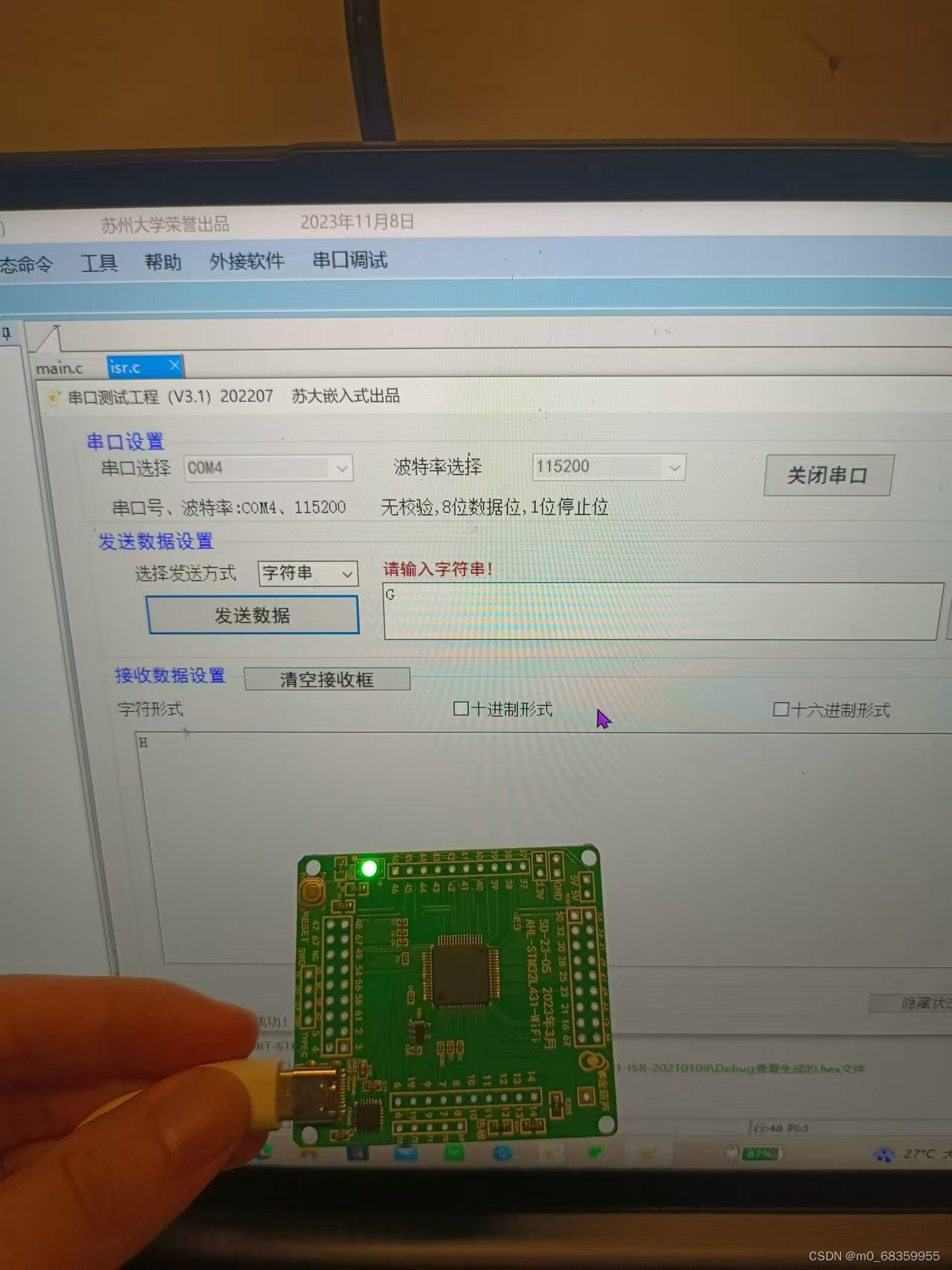
实现UART_2串口的接收程序,
当收到字符时:
①在电脑的输出窗口显示下一个字符,如收到A显示B;
②亮灯:收到字符G,亮绿灯;收到字符R,亮红灯;收到字符B,亮蓝灯;收到其他字符,不亮灯。
1、用构件调用方式实现;
main.c
#define GLOBLE_VAR
#include "includes.h" //包含总头文件
int main(void)
{
//关总中断
DISABLE_INTERRUPTS;
//用户外设模块初始化
gpio_init(LIGHT_BLUE,GPIO_OUTPUT,LIGHT_OFF);
gpio_init(LIGHT_RED,GPIO_OUTPUT,LIGHT_OFF);
gpio_init(LIGHT_GREEN,GPIO_OUTPUT,LIGHT_OFF);
uart_init(UART_User,115200); //初始化串口模块
//打开使能模块中断
uart_enable_re_int(UART_User); //使能UART_USER模块接收中断功能
//开总中断
ENABLE_INTERRUPTS;
//提示进入串口工具进行操作
printf("=====================================\n");
printf("---------------广州大学---------------\n");
printf("网络211 32106200041 zzj\n");
printf("=====================================\n");
}isr.c
//=====================================================================
//文件名称:isr.c(中断处理程序源文件)
//框架提供:SD-ARM(sumcu.suda.edu.cn)
//版本更新:20170801-20191020
//功能描述:提供中断处理程序编程框架
//移植规则:【固定】
//=====================================================================
#include "includes.h"
//======================================================================
//程序名称:UART_User_Handler
//触发条件:UART_User串口收到一个字节触发
//======================================================================
void UART_User_Handler(void)
{
//【1】声明局部变量
uint8_t ch;
uint8_t flag;
uint8_t f;
//【2】关总中断
DISABLE_INTERRUPTS;
//【3】读取接到的一个字节
ch=uart_re1(UART_User,&flag);
//【4】根据flag判断是否真正收到一个字节的数据
if(flag)
{
gpio_init(LIGHT_RED,GPIO_OUTPUT,LIGHT_OFF);
gpio_init(LIGHT_GREEN,GPIO_OUTPUT,LIGHT_OFF);
gpio_init(LIGHT_BLUE,GPIO_OUTPUT,LIGHT_OFF);
switch(ch)
{
case 'R':
gpio_set(LIGHT_RED,LIGHT_ON);
break;
case 'G':
gpio_set(LIGHT_GREEN,LIGHT_ON);
break;
case 'B':
gpio_set(LIGHT_BLUE,LIGHT_ON);
break;
default:
break;
}
uart_send1(UART_User,ch+1);
}
//【5】开总中断
ENABLE_INTERRUPTS;
}2、UART部分用直接地址方式实现(即不调用uart.c中的函数,其他部分如GPIO、中断设置可调用函数)
main.c
//======================================================================
//文件名称:main.c(应用工程主函数)
//框架提供:SD-Arm(sumcu.suda.edu.cn)
//版本更新:20191108-20201106
//功能描述:见本工程的..\01_Doc\Readme.txt
//移植规则:【固定】
//======================================================================
#define GLOBLE_VAR
#include "includes.h" //包含总头文件
//----------------------------------------------------------------------
//声明使用到的内部函数
//main.c使用的内部函数声明处
//----------------------------------------------------------------------
//主函数,一般情况下可以认为程序从此开始运行(实际上有启动过程,参见书稿)
int main(void)
{
//(1)======启动部分(开头)==========================================
//(1.1)声明main函数使用的局部变量
uint8_t mTest;
uint32_t mCount;
//uart寄存器相关地址
volatile uint32_t* RCC_AHB2; //GPIO的A口时钟使能寄存器地址
volatile uint32_t* RCC_APB1; //UART的2口时钟使能寄存器地址
volatile uint32_t* gpio_ptr; //GPIO的A口基地址
volatile uint32_t* uart_ptr; //uart2端口的基地址
volatile uint32_t* gpio_mode; //引脚模式寄存器地址=口基地址
volatile uint32_t* gpio_afrl; //GPIO复用功能低位寄存器
volatile uint32_t* uart_brr; //UART波特率寄存器地址
volatile uint32_t* uart_isr; // UART中断和状态寄存器基地址
volatile uint32_t* uart_cr1; //UART控制寄存器1基地址
volatile uint32_t* uart_cr2; // UART控制寄存器2基地址
volatile uint32_t* uart_cr3; // UART控制寄存器3基地址
volatile uint32_t* uart_tdr; // UART发送数据寄存器
uint16_t usartdiv; //BRR寄存器应赋的值
//变量赋值
RCC_APB1=0x40021058UL; //UART时钟使能寄存器地址
RCC_AHB2=0x4002104CUL; //GPIO的A口时钟使能寄存器地址
gpio_ptr=0x48000000UL; //GPIOA端口的基地址
uart_ptr=0x40004400UL; //UART2端口的基地址
gpio_mode=0x48000000UL; //引脚模式寄存器地址=口基地址
gpio_afrl=0x48000020UL; // GPIO复用功能低位寄存器
uart_cr1=0x40004400UL; //UART控制寄存器1基地址
uart_brr=0x4000440CUL; // UART波特率寄存器地址
uart_isr=0x4000441CUL; // UART中断和状态寄存器基地址
uart_tdr=0x40004428UL; //UART发送数据寄存器
uart_cr2=0x40004404UL; // UART控制寄存器2基地址
uart_cr3=0x40004408UL; //UART控制寄存器3基地址
//(1.2)【不变】关总中断
DISABLE_INTERRUPTS;
//(1.3)给主函数使用的局部变量赋初值
mCount=0;
//(1.4)给全局变量赋初值
//(1.5)用户外设模块初始化
gpio_init(LIGHT_BLUE,GPIO_OUTPUT,LIGHT_ON); //初始化蓝灯
//uart_init(UART_User,115200);
//使能GPIOA和UART2的时钟
*RCC_APB1|=(0x1UL<<17U); //UART2时钟使能
*RCC_AHB2 |=(0x1UL<<0U); //GPIOA时钟使能
//将GPIO端口设置为复用功能
//首先将D7、D6、D5、D4清零
*gpio_mode &= ~((0x3UL<<4U)|(0x3UL<<6U));
//然后将D7、D6、D5、D4设为1010,设置PTA2、PTA3为复用功能串行功能。
*gpio_mode |=((0x2UL<<4U)|(0x2UL<<6U));
//选择引脚的端口复用功能
//首先将D15~D8清零
*gpio_afrl &= ~((0xFUL<<8U)|(0xFUL<<12U));
//然后将D15~D8设置为01110111,分别将PTA3、PTA2引脚设置为USART2_RX、USART2_TX
*gpio_afrl=(((0x1UL<<8U)|(0x2UL<<8U)|(0x4UL<<8U))|((0x1UL<<12U)
|(0x2UL<<12U)|(0x4UL<<12U)));
//暂时禁用UART功能,控制寄存器1的第0位对应的是UE—USART使能位。
//此位清零后,USART预分频器和输出将立即停止,并丢弃所有当前操作。
*uart_cr1 &= ~(0x1UL);
//暂时关闭串口发送与接收功能,控制寄存器1的发送器使能位(D3)、接收器使能位(D2)
*uart_cr1 &= ~((0x1UL<<3U)|(0x1UL<<2U));
//配置波特率
if(*uart_cr1&(0x1UL<<15) == (0x1UL<<15))
usartdiv = (uint16_t)((SystemCoreClock/115200)*2);
else
usartdiv = (uint16_t)((SystemCoreClock/115200));
*uart_brr = usartdiv;
//初始化控制寄存器和中断状态寄存器、清标志位
//关中断
*uart_isr = 0x0UL;
//将控制寄存器2的两个使能位清零。D14—LIN模式使能位、D11—时钟使能位
*uart_cr2 &= ~((0x1UL<<14U)|(0x1UL<<11U));
//将控制寄存器3的三个使能位清零。D5 (SCEN) —smartcard模式使能位、
//D3 (HDSEL) —半双工选择位、D1 (IREN) —IrDA 模式使能位
*uart_cr3 &= ~((0x1UL<<5U) | (0x1UL<<3U) |(0x1UL<<1U));
//启动串口发送与接收功能
*uart_cr1 |= ((0x1UL<<3U)|(0x1UL<<2U));
//开启UART功能
*uart_cr1 |= (0x1UL<<0U);
//(1.6)使能模块中断
uart_enable_re_int(UART_User); //使能UART_User模块接收中断功能
//(1.7)【不变】开总中断
ENABLE_INTERRUPTS;
printf("=====================================\n");
printf("---------------广州大学---------------\n");
printf("网络211 32106200041 zzj\n");
printf("=====================================\n");
}
isr.c
#include "includes.h"
#define GLOBLE_VAR
volatile uint32_t* uart_isr = (volatile uint32_t*)0x4000441CUL; // UART中断和状态寄存器基地址
volatile uint32_t* uart_rdr = (volatile uint32_t*)0x40004424UL; // UART接受数据寄存器
volatile uint32_t* uart_tdr = (volatile uint32_t*)0x40004428UL; // UART发送数据寄存器
void User_SysFun(uint8_t ch);
//======================================================================
//程序名称:UART_User_Handler
//触发条件:UART_User串口收到一个字节触发
//备 注:进入本程序后,可使用uart_get_re_int函数可再进行中断标志判断
// (1-有UART接收中断,0-没有UART接收中断)
//======================================================================
void USART2_IRQHandler(void)
{
uint8_t ch;
uint8_t flag;
uint32_t t;
DISABLE_INTERRUPTS; //关总中断
//接收一个字节的数据
//ch=uart_re1(UART_User,&flag); //调用接收一个字节的函数,清接收中断位
for(t = 0; t < 0xFBBB; t++)//一直查询缓冲区是否有数据
{
//先判断isr状态位,再获取数据
if((*uart_isr)&(1<<5U))//第五位为1
{
ch = *uart_rdr;//从RDR寄存器取数
flag = 1;
break;
}
}
if(t>=0xFBBB)//超过指定次数
{
ch = 0XFF;
flag = 0;
}
if(flag) //有数据
{
gpio_init(LIGHT_RED,GPIO_OUTPUT,LIGHT_OFF);
gpio_init(LIGHT_GREEN,GPIO_OUTPUT,LIGHT_OFF);
gpio_init(LIGHT_BLUE,GPIO_OUTPUT,LIGHT_OFF);
switch(ch)
{
case 'R':
gpio_set(LIGHT_RED,LIGHT_ON);
break;
case 'G':
gpio_set(LIGHT_GREEN,LIGHT_ON);
break;
case 'B':
gpio_set(LIGHT_BLUE,LIGHT_ON);
break;
default:
break;
}
uart_send1(UART_User,ch+1);
}
ENABLE_INTERRUPTS; //开总中断
}
运行结果:

第七章作业
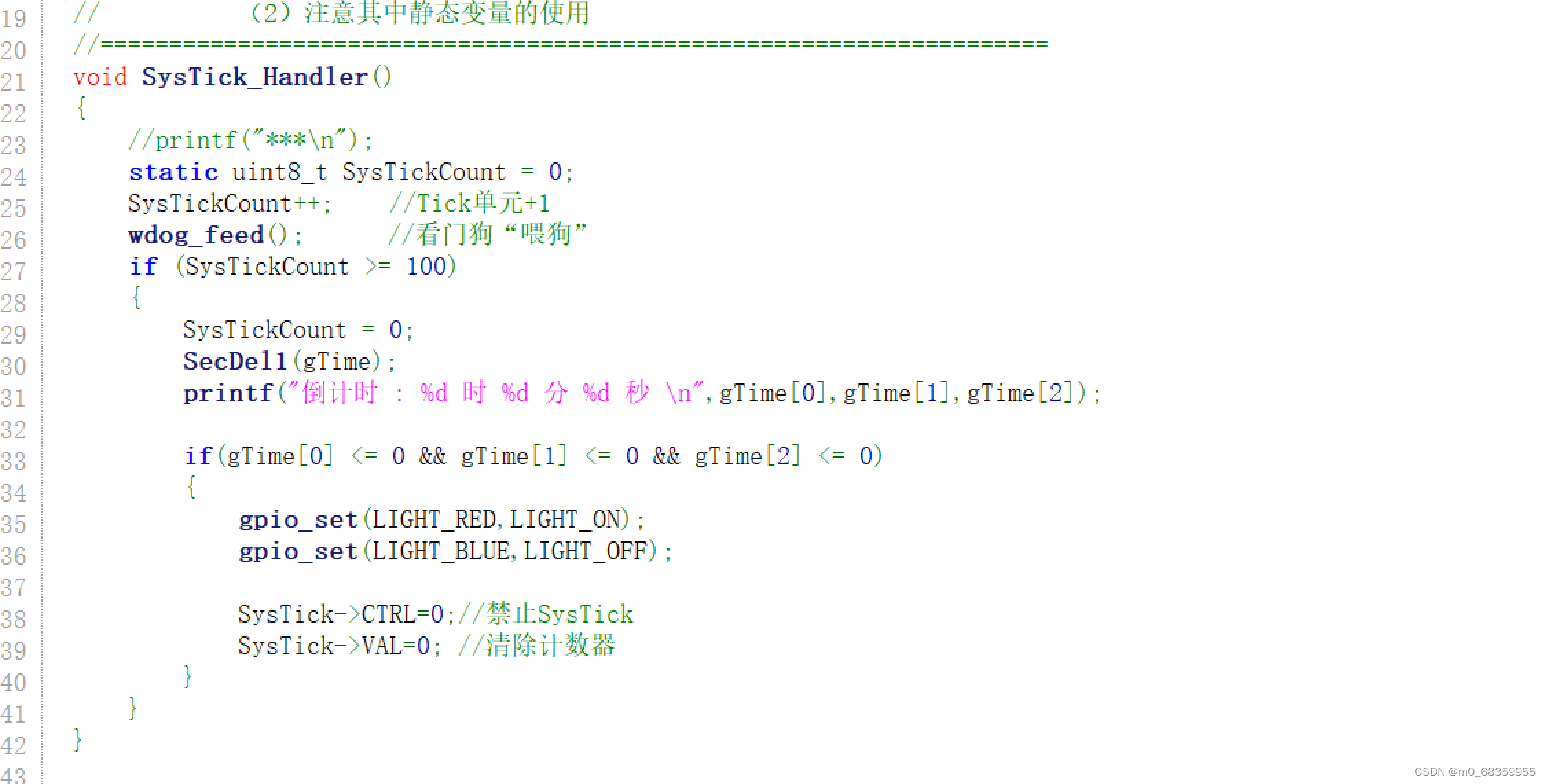
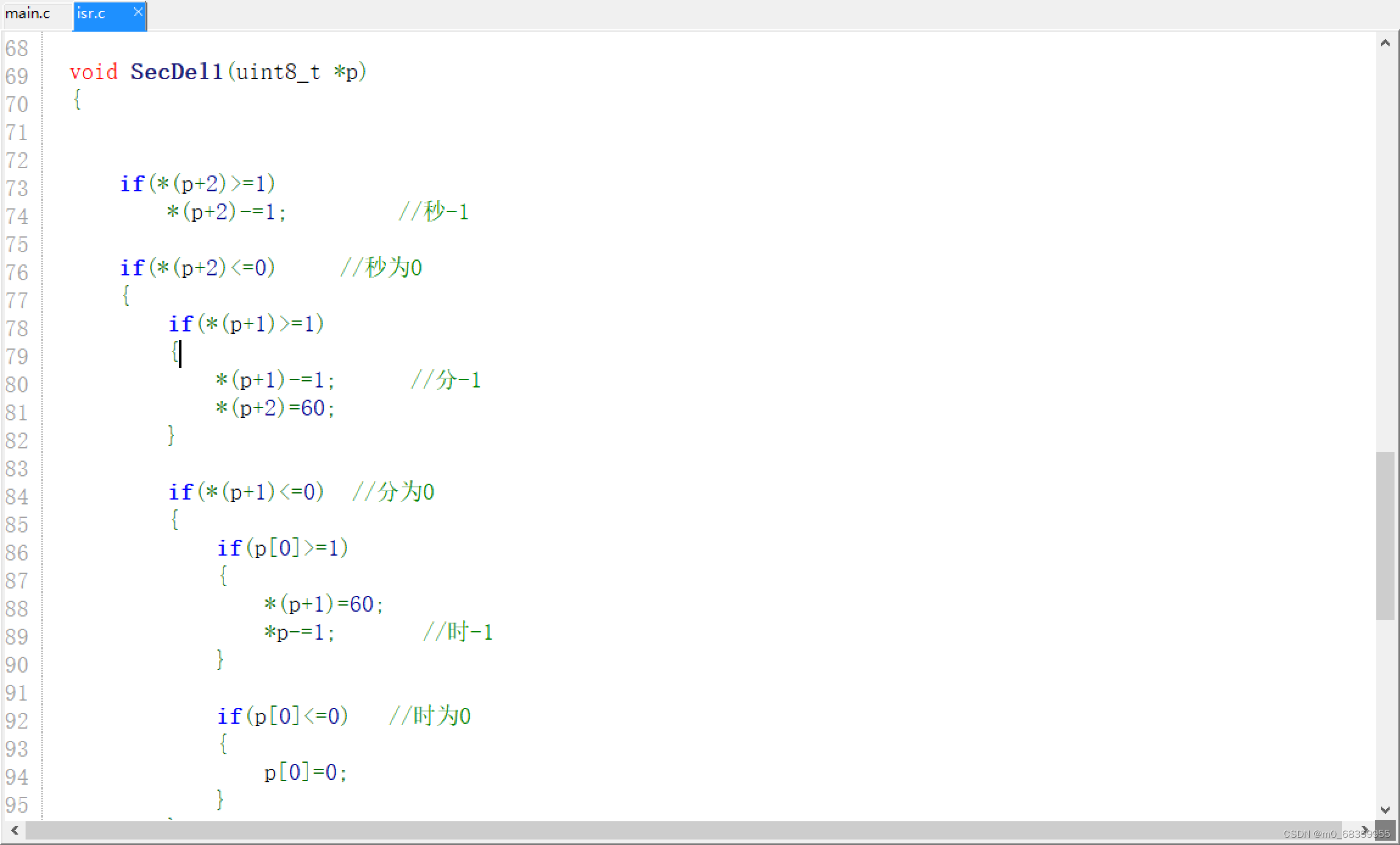
1、利用SysTick定时器编写倒计时程序,如初始设置为2分30秒,每秒在屏幕上输出一次时间,倒计时为0后,红灯亮,停止屏幕输出,并关闭SysTick定时器的中断。
设置倒计时时间,并初始化红灯
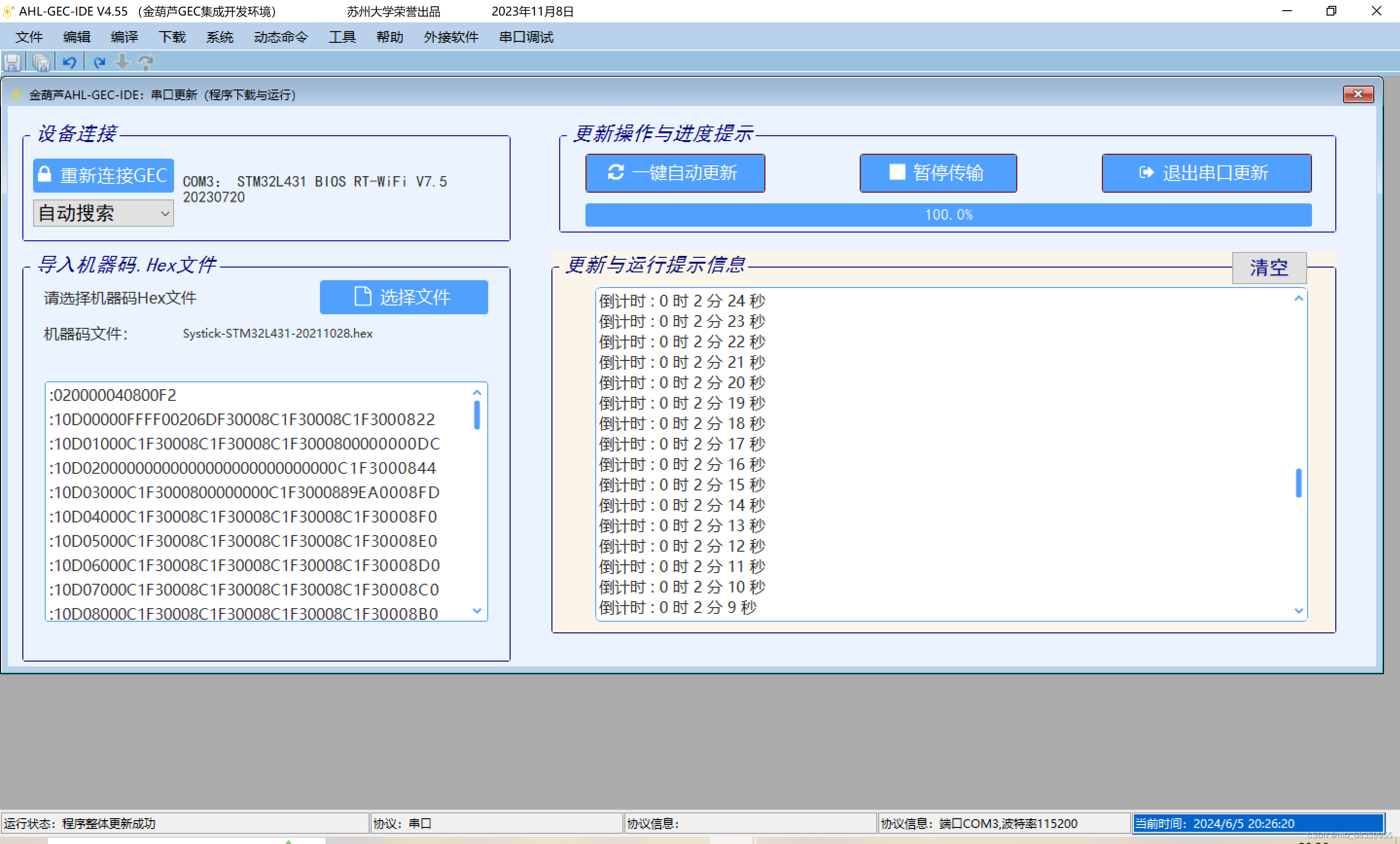
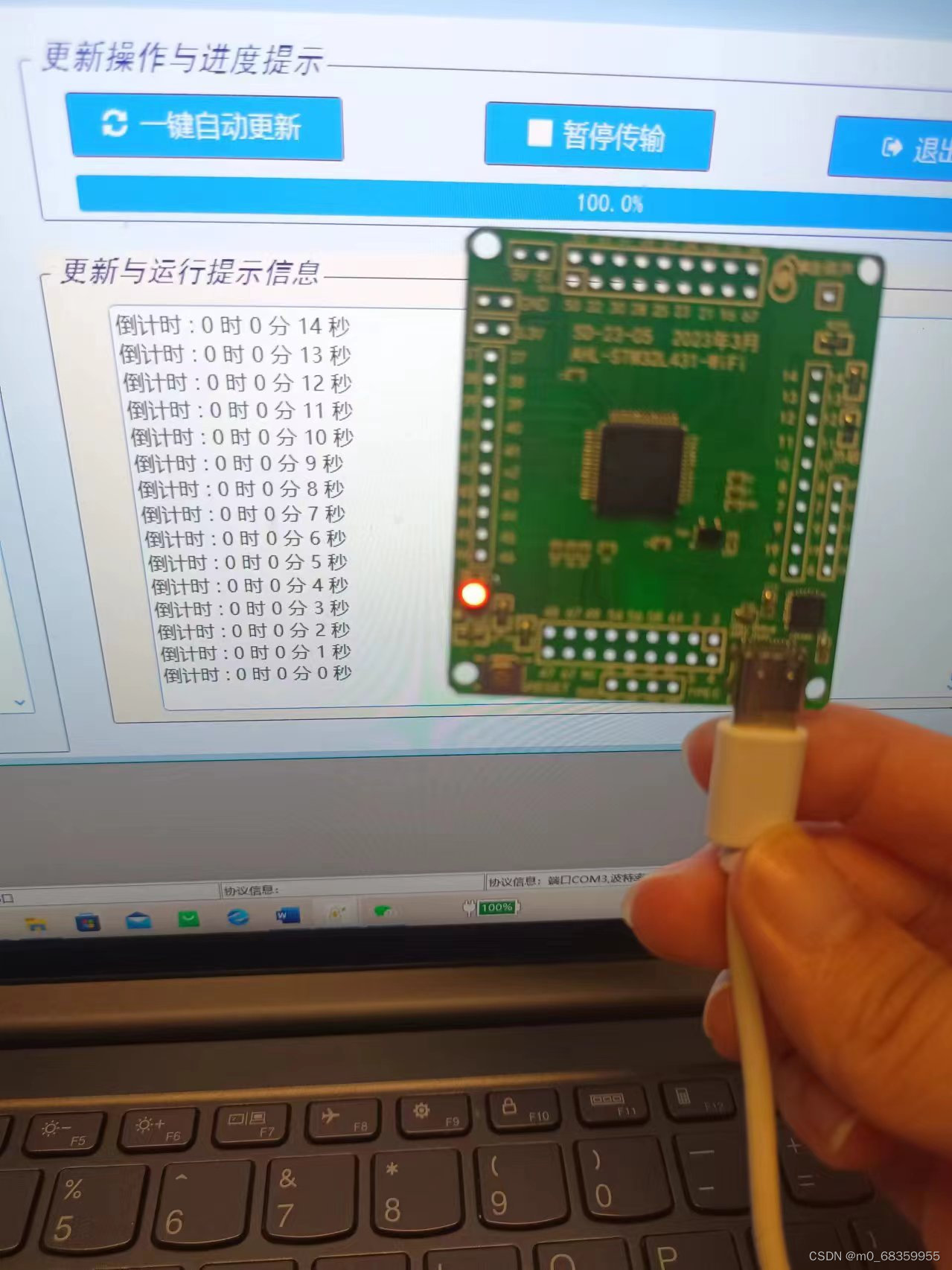
运行结果:
倒计时2分30秒
倒计时结束,红灯亮
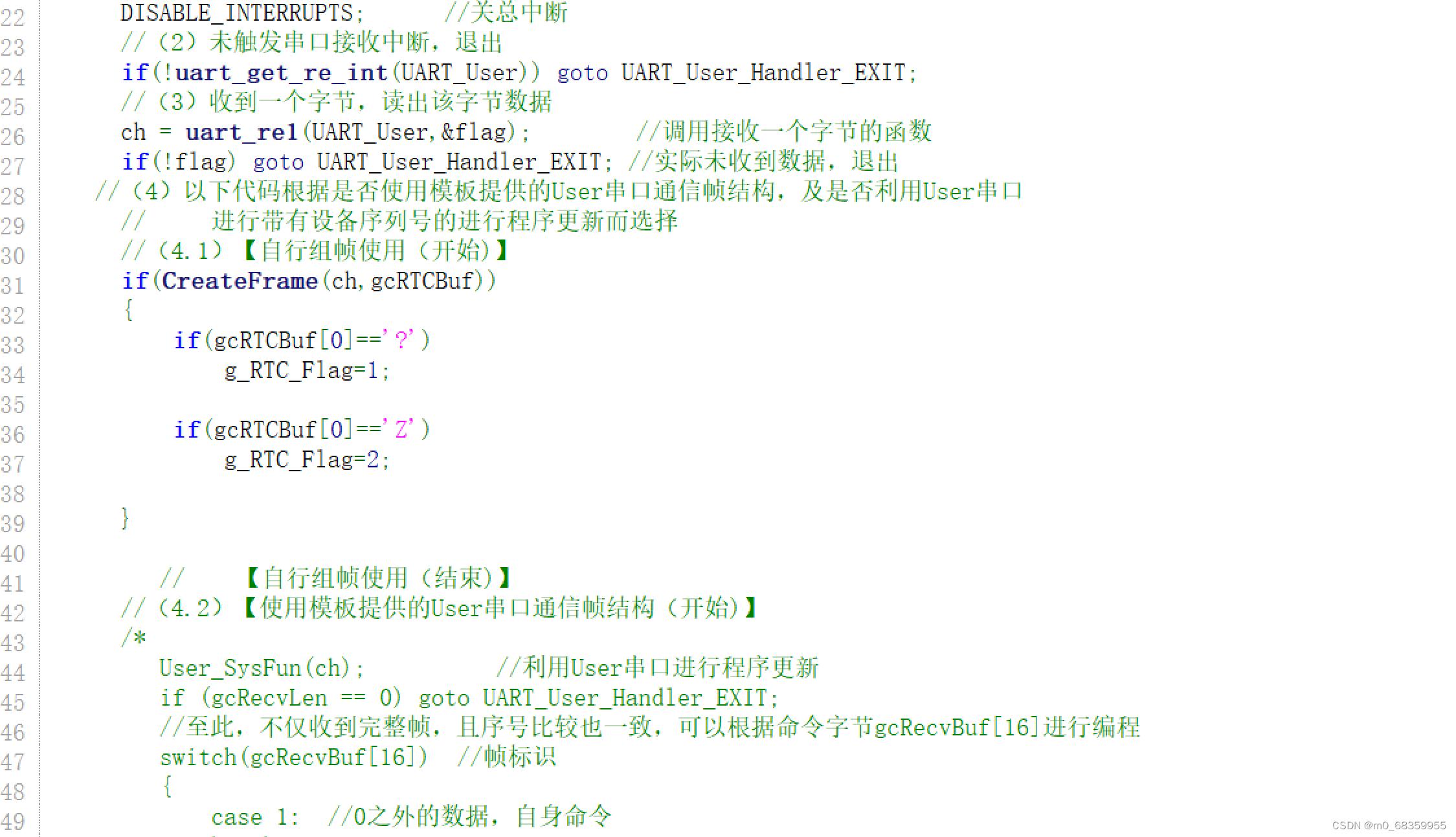
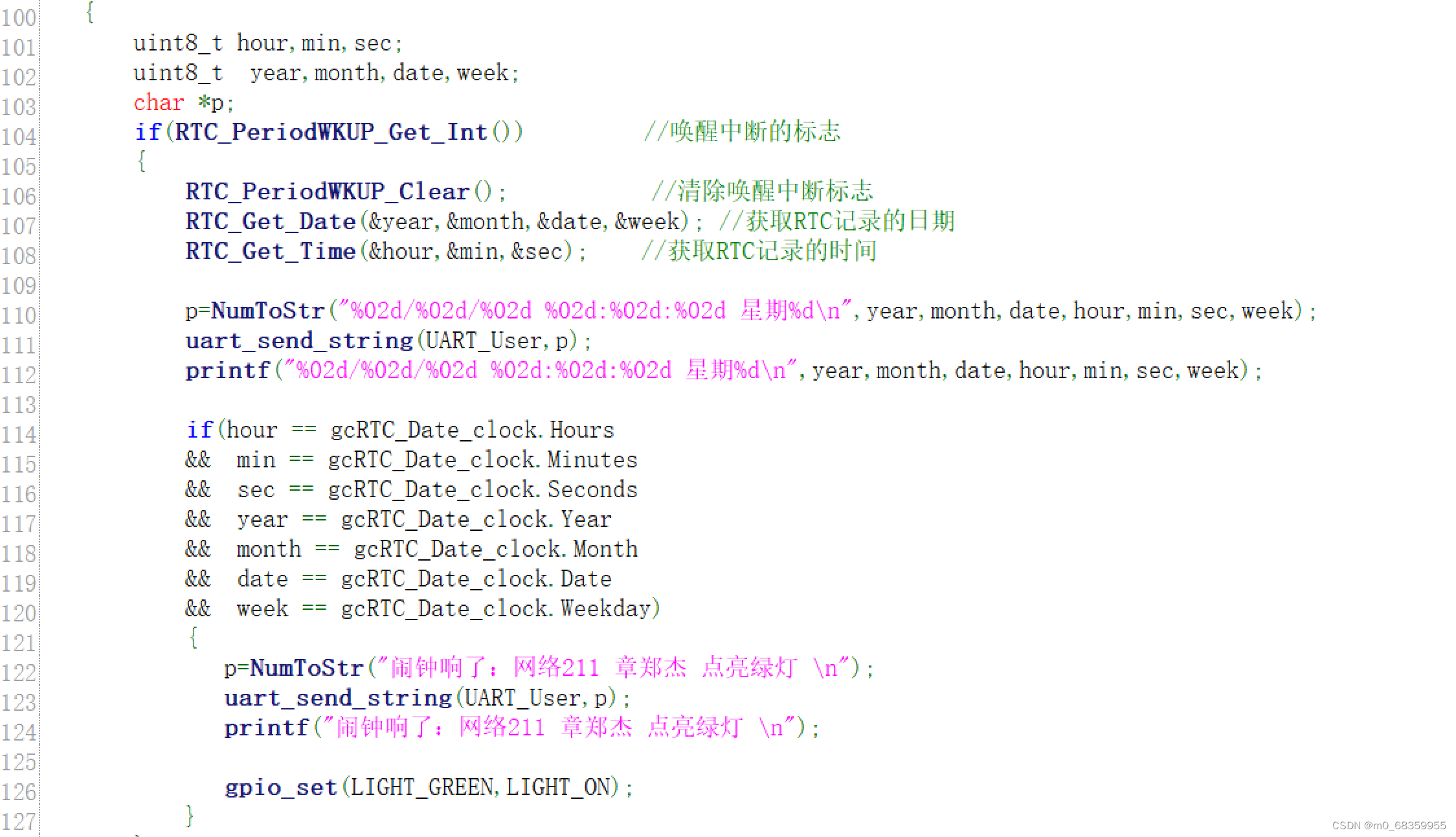
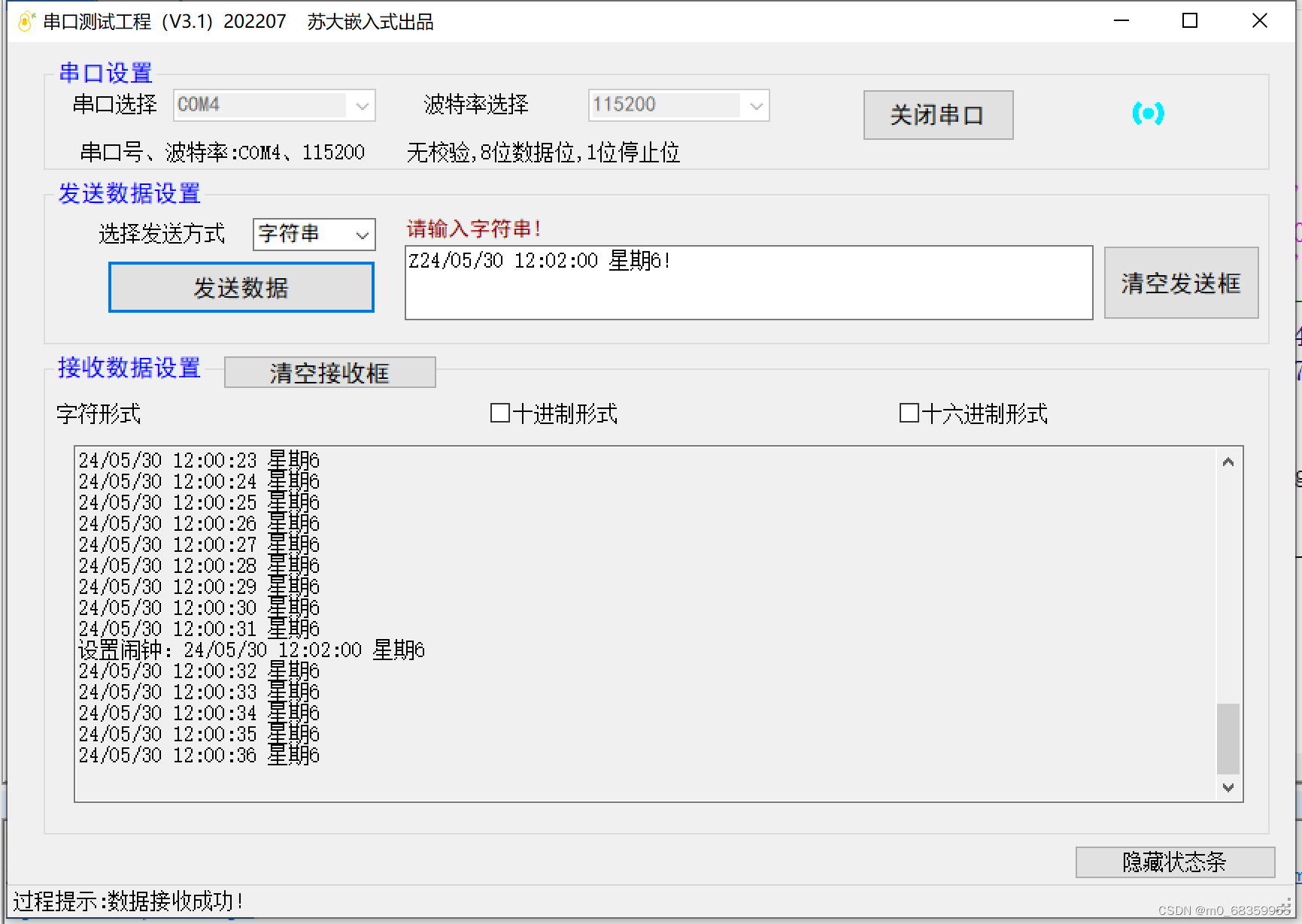
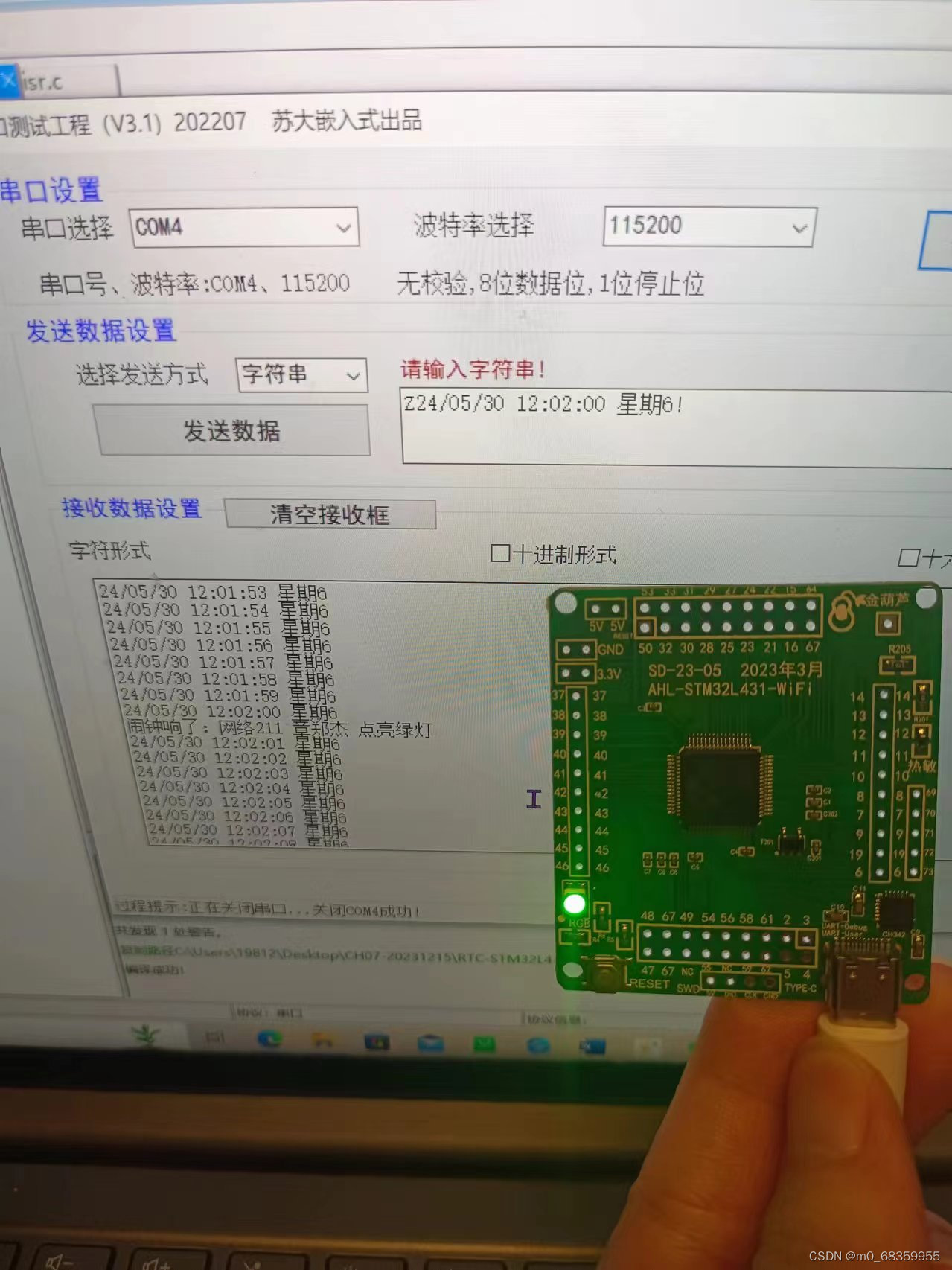
2、利用RTC显示日期(年月日、时分秒),每秒更新。并设置某个时间的闹钟。闹钟时间到时,屏幕上显示有你的姓名的文字,并点亮绿灯。
设置闹钟
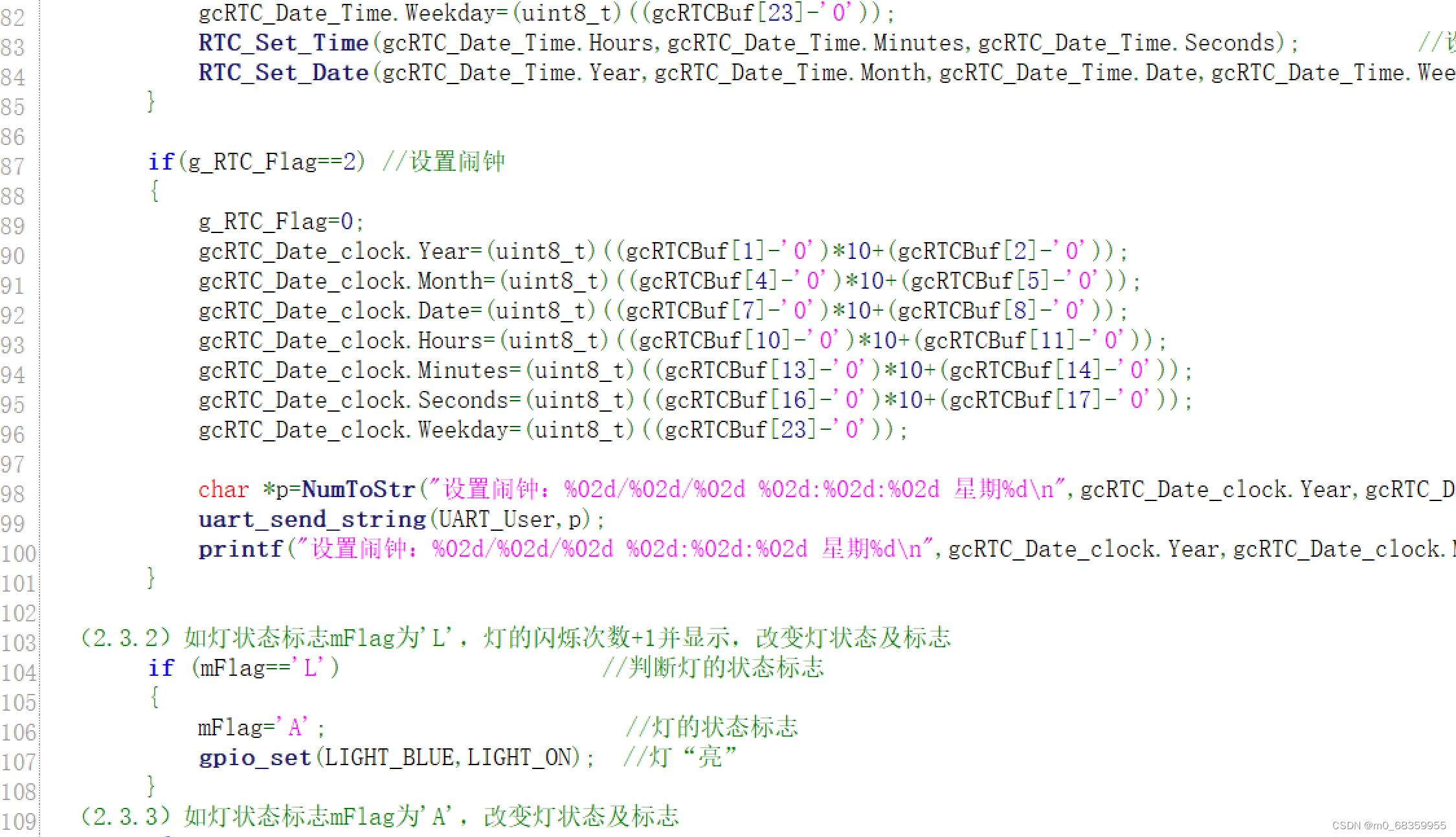
收到数据帧头为?设置时间,收到数据帧头为Z设置闹钟
闹钟唤醒中断
运行结果:
设置时间:
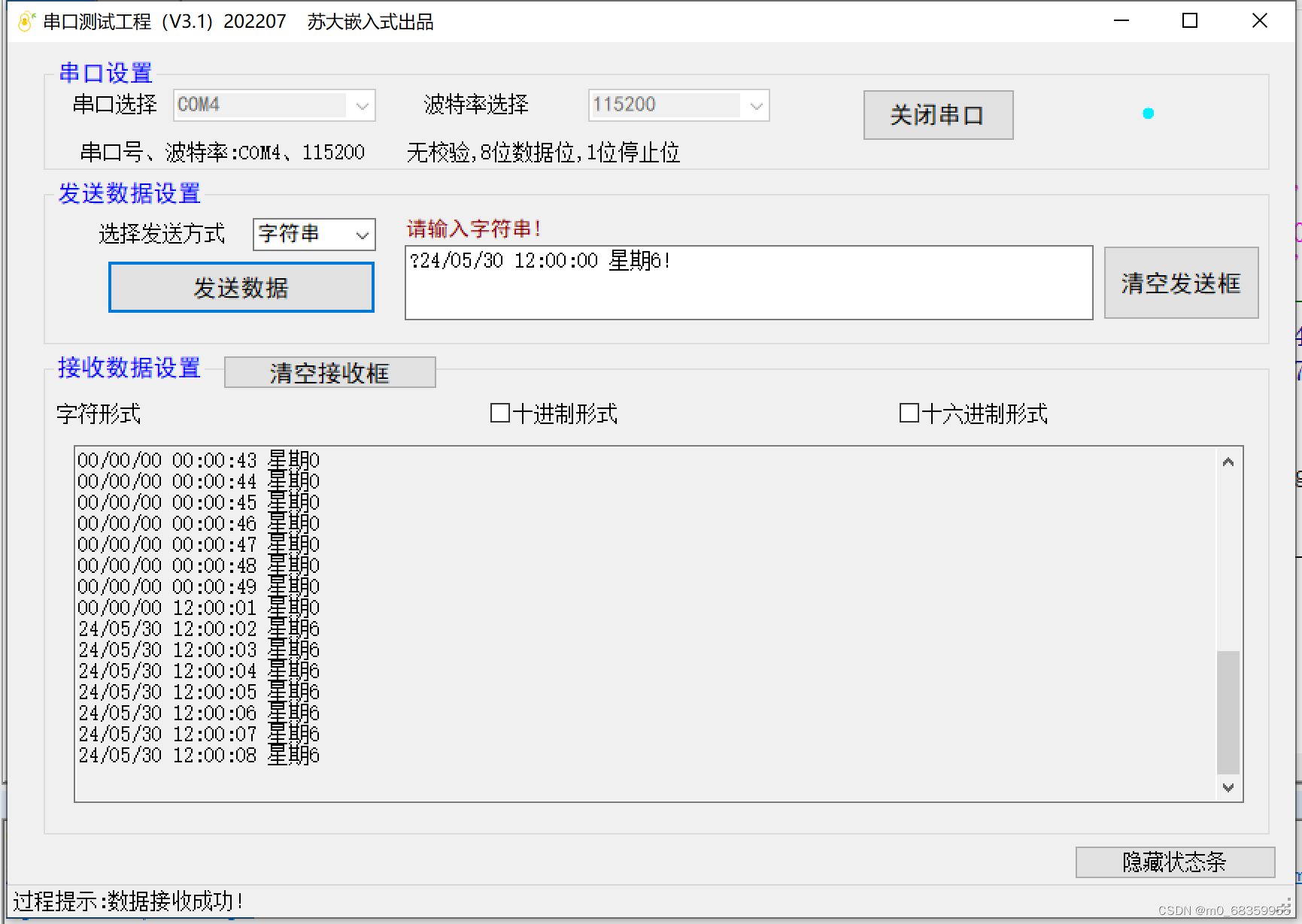
设置闹钟:
闹钟唤醒:
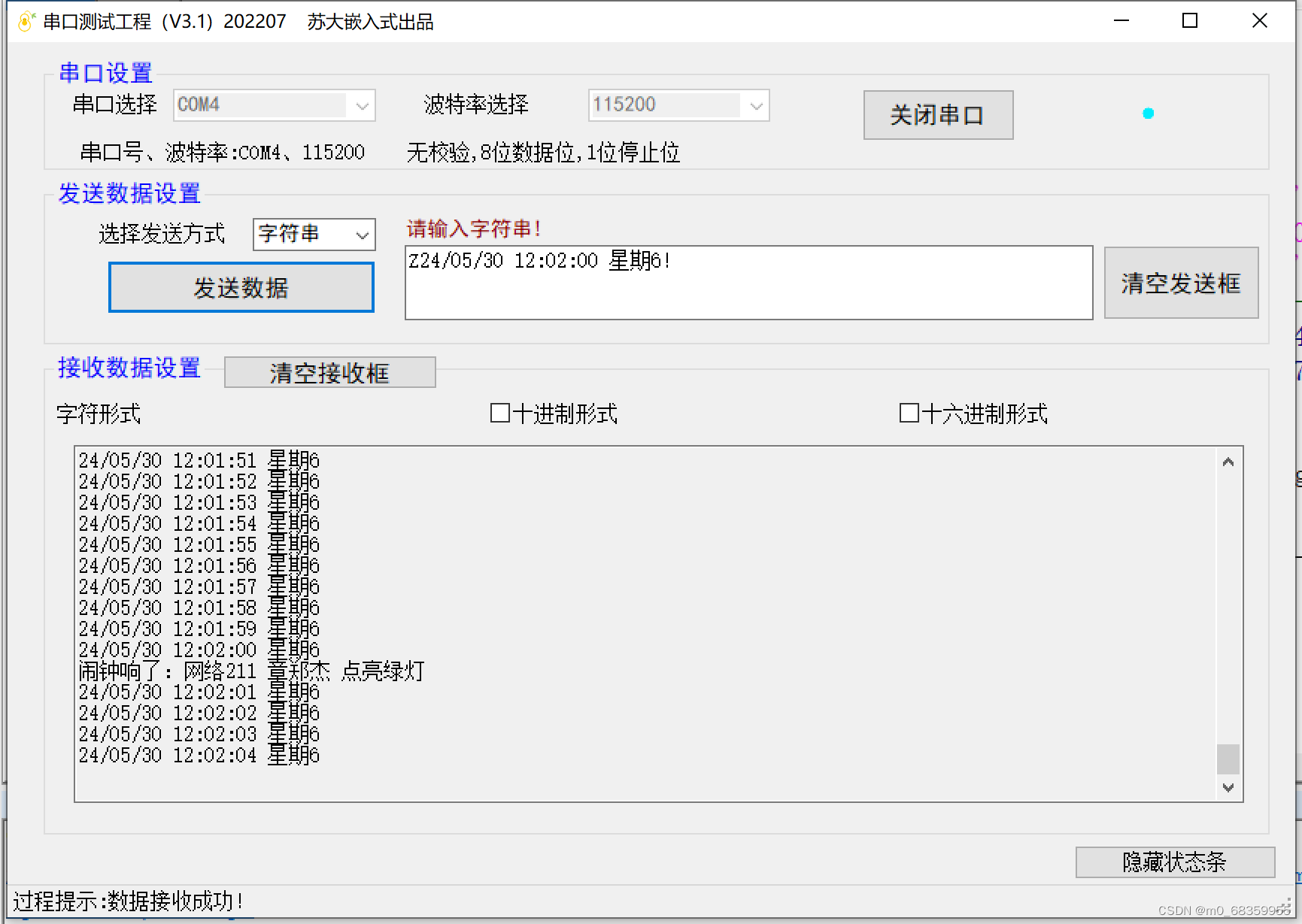
绿灯亮:
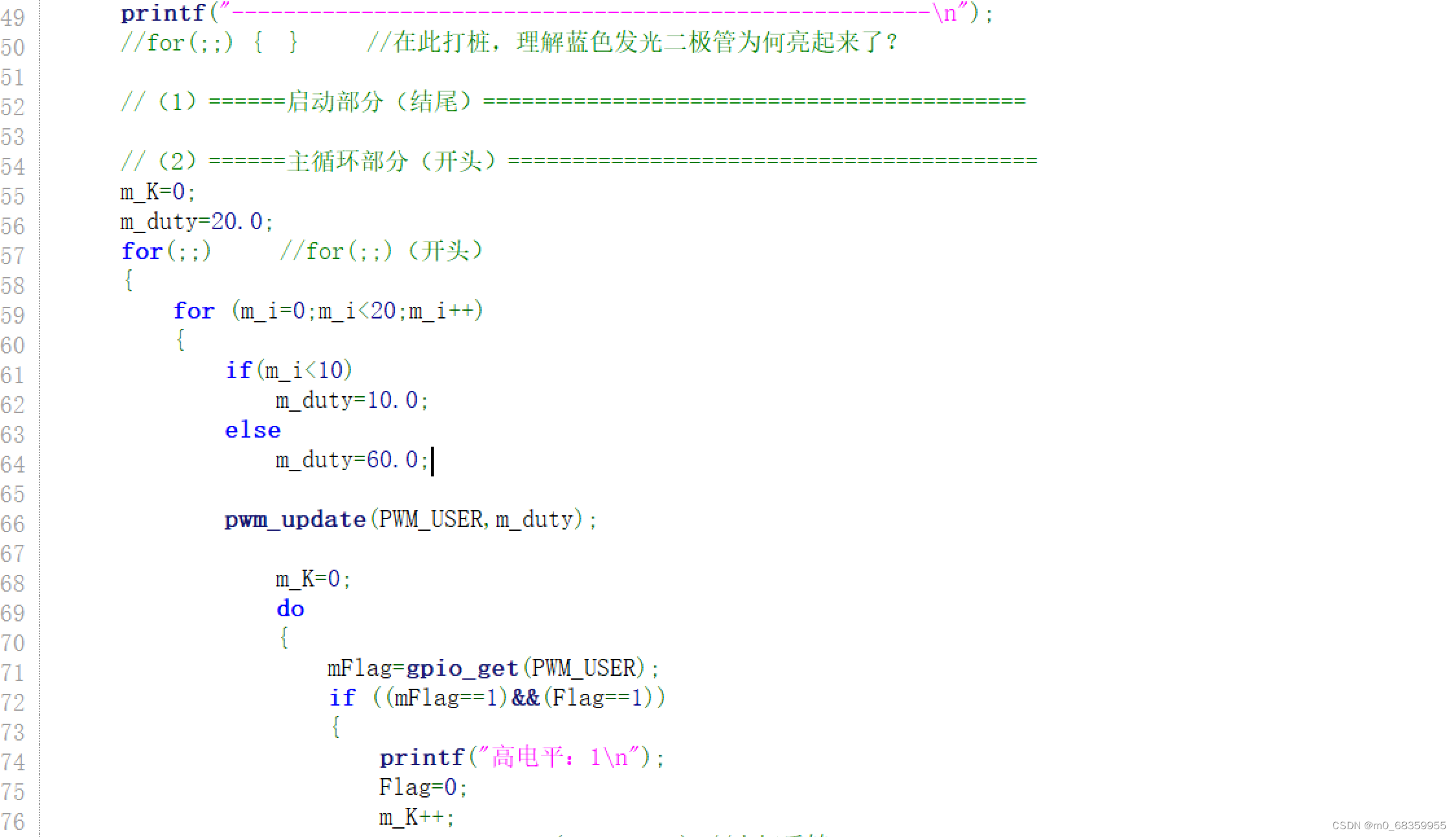
3、利用PWM脉宽调制,交替显示红灯的5个短闪和5个长闪。
前10次为短闪,占空比为10,后10次为长闪,占空比为60
4、GEC39定义为输出引脚,GEC10定义为输入引脚,用杜邦线将两个引脚相连,验证捕捉实验程序Incapture-Outcmp-20211110,观察输出的时间间隔。

时间间隔逐渐缩短,蓝灯的闪烁频率逐渐变快。
第八章作业
1、用实验验证,对于有数据的某扇区,如果没有擦除(Flash_erase),可否写入新数据?注:扇区号为学号 后2位,数据文本中要有姓名。
//======================================================================
//文件名称:main.c(应用工程主函数)
//框架提供:SD-Arm(sumcu.suda.edu.cn)
//版本更新:20191108-20200419
//功能描述:见本工程的..\01_Doc\Readme.txt
//移植规则:【固定】
//======================================================================
#define GLOBLE_VAR
#include "includes.h" //包含总头文件
//----------------------------------------------------------------------
//声明使用到的内部函数
//main.c使用的内部函数声明处
//----------------------------------------------------------------------
//主函数,一般情况下可以认为程序从此开始运行(实际上有启动过程,参见书稿)
int main(void)
{
//(1)======启动部分(开头)==========================================
//(1.1)声明main函数使用的局部变量
uint32_t mMainLoopCount; //主循环次数变量
uint8_t mFlag; //灯的状态标志
uint32_t mLightCount; //灯的状态切换次数
uint8_t mK1[32]; //按照逻辑读方式从指定flash区域中读取的数据
uint8_t mK2[32]; //按照物理读方式从指定flash区域中读取的数据
uint8_t flash_test[32]={'A','B','C','D','E','F','G',' ','t',
'o',' ','S','o','o','c','h','o','w',' ',
'U','n','i','v','e','r','s','i','t','y','!'};
uint8_t result; //判断扇区是否为空标识
//(1.2)【不变】关总中断
DISABLE_INTERRUPTS;
//(1.3)给主函数使用的局部变量赋初值
mMainLoopCount=0; //主循环次数变量
mFlag='A'; //灯的状态标志
mLightCount=0; //灯的闪烁次数
//(1.4)给全局变量赋初值
//(1.5)用户外设模块初始化
gpio_init(LIGHT_BLUE,GPIO_OUTPUT,LIGHT_ON); //初始化蓝灯
//(1.6)使能模块中断
//(1.7)【不变】开总中断
ENABLE_INTERRUPTS;
printf("------------------------------------------------------\n");
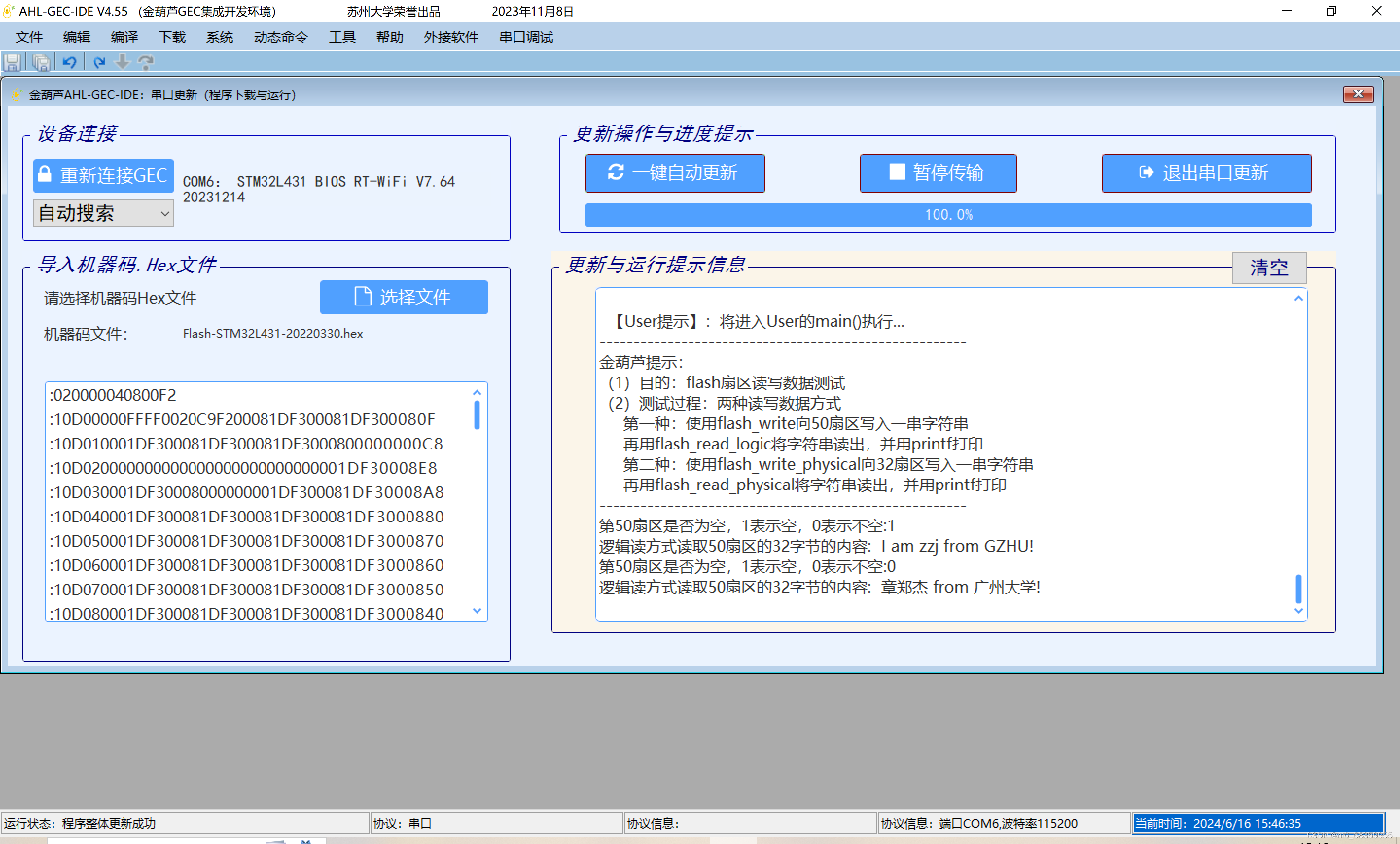
printf("金葫芦提示: \n");
printf("(1)目的:flash扇区读写数据测试 \n");
printf("(2)测试过程:两种读写数据方式 \n");
printf(" 第一种:使用flash_write向50扇区写入一串字符串 \n");
printf(" 再用flash_read_logic将字符串读出,并用printf打印 \n");
printf(" 第二种:使用flash_write_physical向32扇区写入一串字符串\n");
printf(" 再用flash_read_physical将字符串读出,并用printf打印 \n");
printf("------------------------------------------------------\n");
//(1)======启动部分(结尾)==========================================
//擦除第50扇区
flash_erase(50);
result = flash_isempty(50,MCU_SECTORSIZE); // 判断第50扇区是否为空
printf("第50扇区是否为空,1表示空,0表示不空:%d\n",result);
//向50扇区第0偏移地址开始写32个字节数据
flash_write(50,0,32,(uint8_t *) "I am zzj from GZHU!");
flash_read_logic(mK1,50,0,32); //从50扇区读取32个字节到mK1中
printf("逻辑读方式读取50扇区的32字节的内容: %s\n",mK1);
result = flash_isempty(50,MCU_SECTORSIZE); // 判断第50扇区是否为空
printf("第50扇区是否为空,1表示空,0表示不空:%d\n",result);
//向50扇区第0偏移地址开始写32个字节数据
flash_write(50,0,32,(uint8_t *) "章郑杰 from 广州大学!");
flash_read_logic(mK1,50,0,32); //从50扇区读取32个字节到mK1中
printf("逻辑读方式读取50扇区的32字节的内容: %s\n",mK1);
//(2)======主循环部分(开头)========================================
for(;;) //for(;;)(开头)
{
//(2.1)主循环次数变量+1
mMainLoopCount++;
//(2.2)未达到主循环次数设定值,继续循环
if (mMainLoopCount<=12888999) continue;
//(2.3)达到主循环次数设定值,执行下列语句,进行灯的亮暗处理
//(2.3.1)清除循环次数变量
mMainLoopCount=0;
//(2.3.2)如灯状态标志mFlag为'L',灯的闪烁次数+1并显示,改变灯状态及标志
if (mFlag=='L') //判断灯的状态标志
{
mLightCount++;
//printf("灯的闪烁次数 mLightCount = %d\n",mLightCount);
mFlag='A'; //灯的状态标志
gpio_set(LIGHT_BLUE,LIGHT_ON); //灯“亮”
//printf(" LIGHT_BLUE:ON--\n"); //串口输出灯的状态
}
//(2.3.3)如灯状态标志mFlag为'A',改变灯状态及标志
else
{
mFlag='L'; //灯的状态标志
gpio_set(LIGHT_BLUE,LIGHT_OFF); //灯“暗”
//printf(" LIGHT_BLUE:OFF--\n"); //串口输出灯的状态
}
} //for(;;)结尾
//(2)======主循环部分(结尾)========================================
} //main函数(结尾)
//======以下为主函数调用的子函数===========================================
//========================================================================
/*
知识要素:
(1)main.c是一个模板,该文件所有代码均不涉及具体的硬件和环境,通过调用构件
实现对硬件的干预。
(2)本文件中对宏GLOBLE_VAR进行了定义,所以在包含"includes.h"头文件时,会定
义全局变量,在其他文件中包含"includes.h"头文件时,
编译时会自动增加extern
*/
将flash.c中的函数内部的擦除函数注释掉
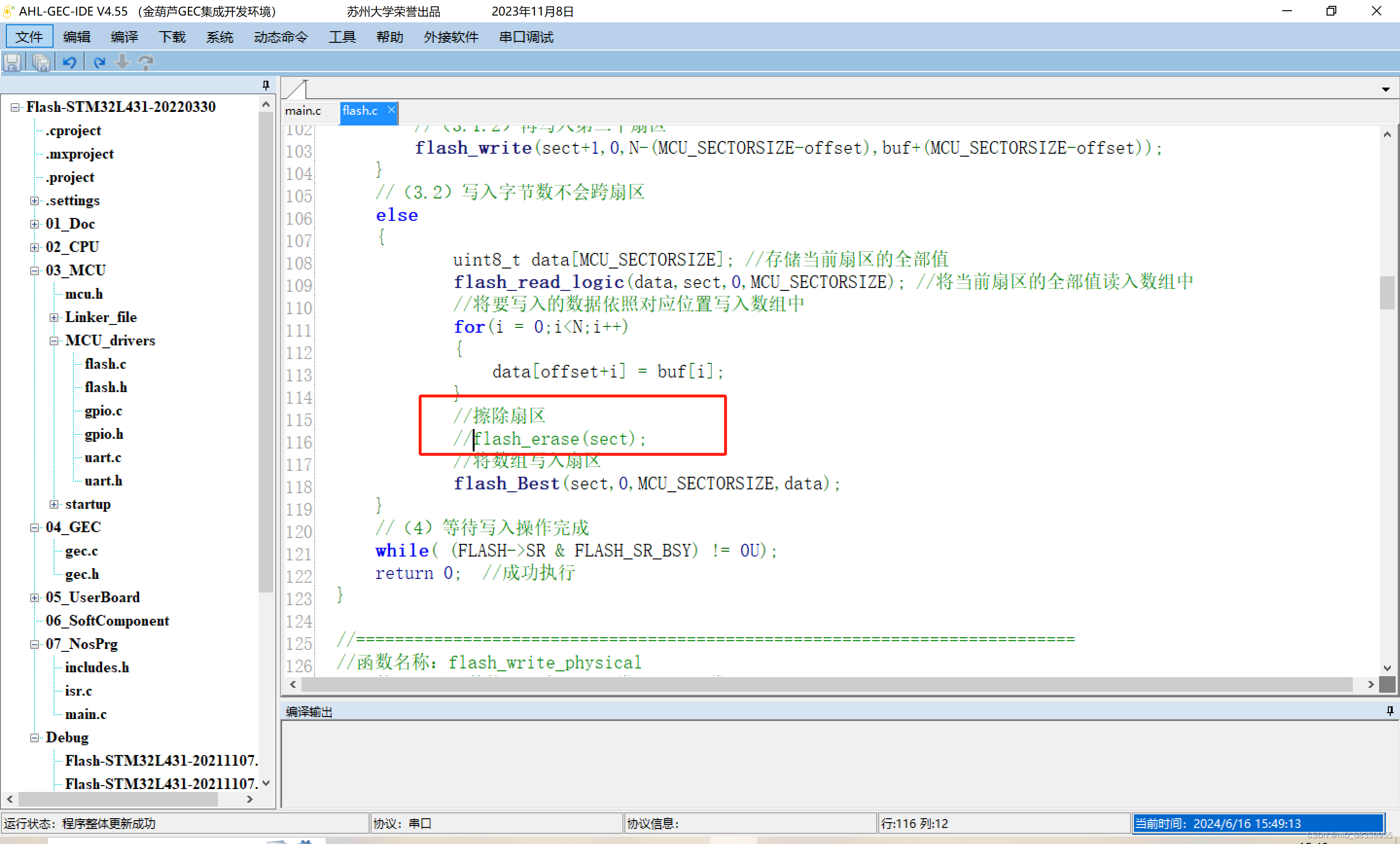
再次运行发现第二次没有写入
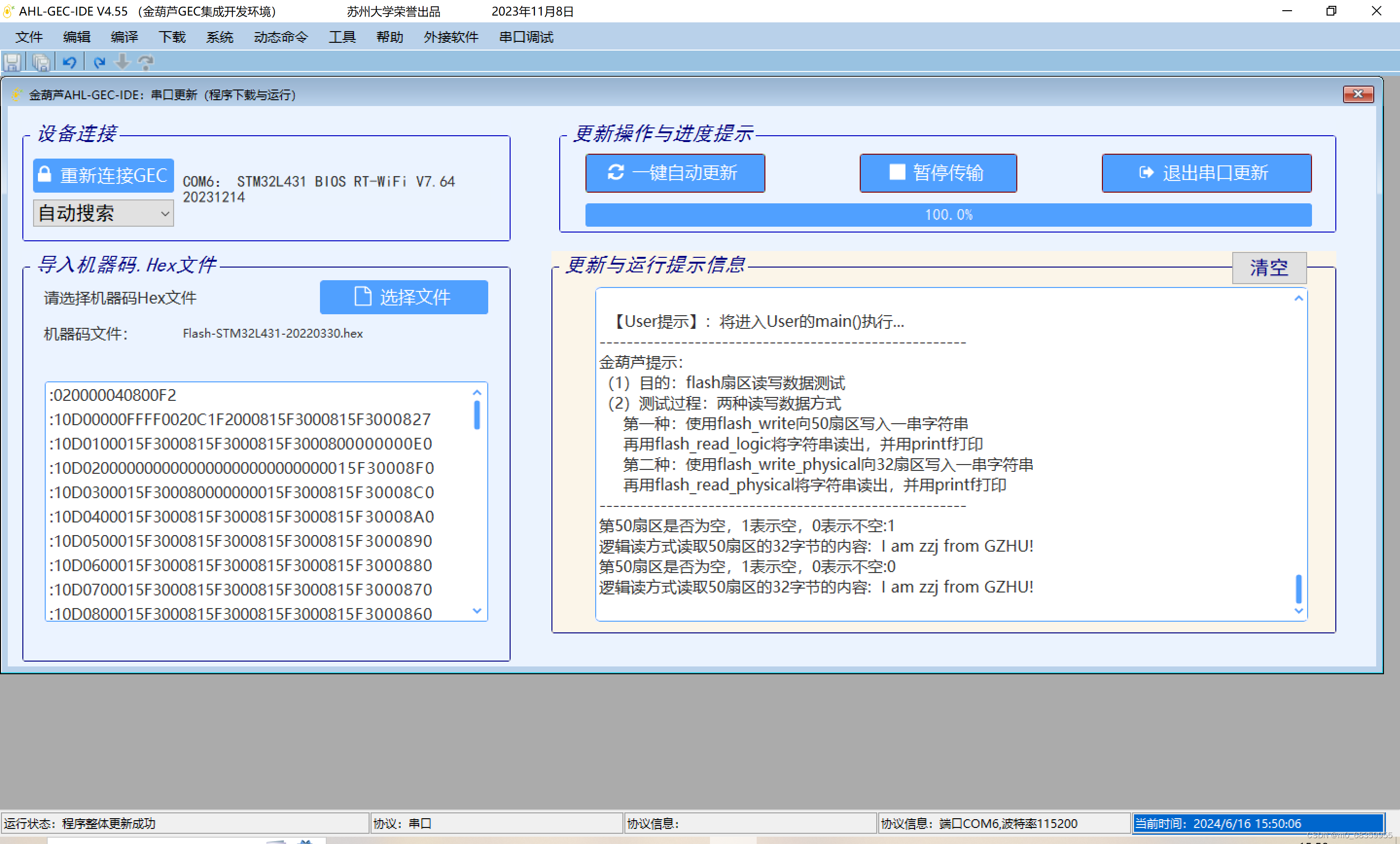
所以对于有数据的某扇区,如果没有擦除(Flash_erase),是不可以写入新数据的。
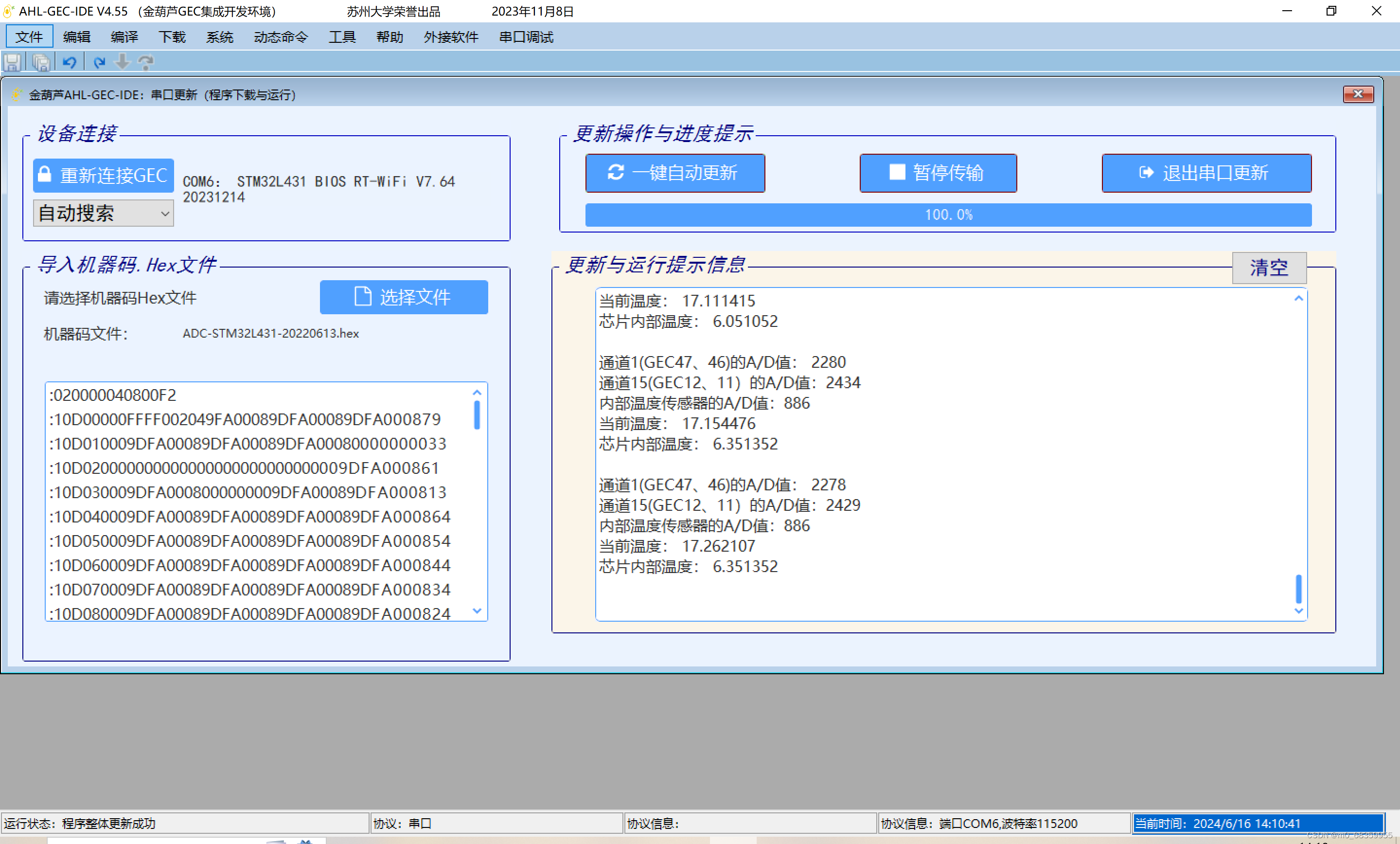
2、在ADC模块中,显示当前温度和芯片内部温度,感受温度变化(分别用冷、热触碰)。
//======================================================================
//文件名称:main.c(应用工程主函数)
//框架提供:SD-Arm(sumcu.suda.edu.cn)
//版本更新:20191108-20200419
//功能描述:见本工程的..\01_Doc\Readme.txt
//移植规则:【固定】
//======================================================================
#define GLOBLE_VAR
#include "includes.h" //包含总头文件
//----------------------------------------------------------------------
//声明使用到的内部函数
//main.c使用的内部函数声明处
void Delay_ms(uint16_t u16ms);
float Regression_Ext_Temp(uint16_t tmpAD); //环境温度AD值转为实际温度
float Regression_MCU_Temp(uint16_t mcu_temp_AD); //MCU温度AD值转为实际温度
//----------------------------------------------------------------------
//主函数,一般情况下可以认为程序从此开始运行(实际上有启动过程,参见书稿)
int main(void)
{
//(1)======启动部分(开头)==========================================
//(1.1)声明main函数使用的局部变量
uint32_t mMainLoopCount; //主循环次数变量
uint8_t mFlag; //灯的状态标志
uint32_t mCount; //延时的次数
uint32_t mLightCount; //灯的状态切换次数
uint16_t num_AD1;
uint16_t num_AD2;
uint16_t num_AD3;
float temp_AD2;
float temp_AD3;
//(1.2)【不变】关总中断
DISABLE_INTERRUPTS;
//(1.3)给主函数使用的局部变量赋初值
mMainLoopCount=0; //主循环次数变量
mFlag='A';
mLightCount=0; //灯的闪烁次数
mCount=0;//记次数
//(1.4)给全局变量赋初值
//(1.5)用户外设模块初始化
gpio_init(LIGHT_BLUE,GPIO_OUTPUT,LIGHT_ON); //初始化蓝灯
adc_init(ADC_CHANNEL_1,AD_DIFF); //初始化ADC通道1,
adc_init(ADC_CHANNEL_15,AD_DIFF); //初始化ADC通道15
adc_init(ADC_CHANNEL_TEMPSENSOR,AD_SINGLE); //初始化ADC通道:内部温度
emuart_init(UART_User,115200);
//(1.6)使能模块中断
uart_enable_re_int(UART_User);
//(1.7)【不变】开总中断
ENABLE_INTERRUPTS;
printf("------------------------------------------------------\n");
printf("金葫芦提示: \n");
printf("(1)目的:ADC单端输入与差分输入测试 \n");
printf("(2)单端:内部温度传感器,通道号17,无需引脚对应 \n");
printf(" 差分:GEC引脚47、46(通道1、2) \n");
printf(" GEC引脚12、11(通道15、16 \n");
printf("(3)测试方法:单端:手摸芯片表面,A/D值增大,不要摸 \n");
printf(" 到引脚,静电可能损坏芯片 \n");
printf(" 差分:将引脚47接地、46接3.3V,观察通道1情况\n");
printf(" 将引脚46接地、47接3.3V,观察通道1情况\n");
printf(" 类似方法,观察通道15 \n");
printf("------------------------------------------------------\n");
//(1)======启动部分(结尾)==========================================
//(2)======主循环部分(开头)========================================
for(;;) //for(;;)(开头)
{
//(2.1)主循环次数变量+1
mMainLoopCount++;
//(2.2)未达到主循环次数设定值,继续循环
//延时1秒
if (mMainLoopCount<=3000000) continue;
//(2.3)达到主循环次数设定值,执行下列语句,进行灯的亮暗处理
//(2.3.1)清除循环次数变量
mMainLoopCount=0;
//(2.3.2)如灯状态标志mFlag为'L',灯的闪烁次数+1并显示,改变灯状态及标志
if (mFlag=='L') //判断灯的状态标志
{
mLightCount++;
mFlag='A'; //灯的状态标志
gpio_set(LIGHT_BLUE,LIGHT_ON); //灯“亮”
Delay_ms(1000);
}
//(2.3.3)如灯状态标志mFlag为'A',改变灯状态及标志
else
{
mFlag='L'; //灯的状态标志
gpio_set(LIGHT_BLUE,LIGHT_OFF); //灯“暗”
Delay_ms(1000);
}
num_AD1 = adc_ave(ADC_CHANNEL_1,8);
num_AD2 = adc_ave(ADC_CHANNEL_15,8);
num_AD3 = adc_ave(ADC_CHANNEL_TEMPSENSOR,8);
temp_AD2 = Regression_Ext_Temp(num_AD2);
temp_AD3 = Regression_MCU_Temp(num_AD3);
printf("通道1(GEC47、46)的A/D值: %d\r\n",num_AD1);
printf("通道15(GEC12、11)的A/D值:%d\r\n",num_AD2);
printf("内部温度传感器的A/D值:%d\r\n",num_AD3);
printf("当前温度: %f \r\n",temp_AD2);
printf("芯片内部温度: %f \r\n\n",temp_AD3);
mCount++;
} //for(;;)结尾
//(2)======主循环部分(结尾)========================================
} //main函数(结尾)
//======以下为主函数调用的子函数===========================================
//======================================================================
//函数名称:Delay_ms
//函数返回:无
//参数说明:无
//功能概要:延时 - 毫秒级
//======================================================================
void Delay_ms(uint16_t u16ms)
{
uint32_t u32ctr;
for(u32ctr = 0; u32ctr < 8000*u16ms; u32ctr++)
{
__ASM("NOP");
}
}
//======================================================================
//功能概要:连续判断三次GPIO的输入引脚,大部分为0,则认为有触摸
//参数说明:GPIO引脚
//函数返回:1:有触摸,0:无触摸
//原理概要:当GPIO引脚被定义为无上下拉输入功能时,容易收到外界干扰,本程序
// 把这个特性转为有用的功能,由于人体相当于一个大电阻,手触摸这个
// 引脚会使得引脚状态发生随机性改变,利用这种变化可以被视为有触摸,
// 实现了无触摸功能引脚的触摸功能
//======================================================================
//============================================================================
//函数名称:Regression_Ext_Temp
//功能概要:将读到的环境温度AD值转换为实际温度
//参数说明:tmpAD:通过adc_read函数得到的AD值
//函数返回:实际温度值
//============================================================================
float Regression_Ext_Temp(uint16_t tmpAD)
{
float Vtemp,Rtemp,temp;
if(tmpAD<=72)
{
return -274;
}
Vtemp = (tmpAD*3300.0)/4096;
Rtemp = Vtemp/(3300.0 - Vtemp)*10000.0;
temp = (1/(log(Rtemp/10000.0)/3950.0 + (1/(273.15 + 25)))) - 273.15 + 0.5;
return temp;
}
//============================================================================
//函数名称:Regression_MCU_Temp
//功能概要:将读到的mcu温度AD值转换为实际温度
//参数说明:mcu_temp_AD:通过adc_read函数得到的AD值
//函数返回:实际温度值
//============================================================================
float Regression_MCU_Temp(uint16_t mcu_temp_AD)
{
float mcu_temp_result;
mcu_temp_result=(float)(55+(100*((float)(mcu_temp_AD) - AD_CAL1))/(AD_CAL2 - AD_CAL1));
return mcu_temp_result;
}
//========================================================================
/*
知识要素:
(1)main.c是一个模板,该文件所有代码均不涉及具体的硬件和环境,通过调用构件
实现对硬件的干预。
(2)本文件中对宏GLOBLE_VAR进行了定义,所以在包含"includes.h"头文件时,会定
义全局变量,在其他文件中包含"includes.h"头文件时,
编译时会自动增加extern
*/
运行结果:

用手触摸热敏电阻后,当前温度上升
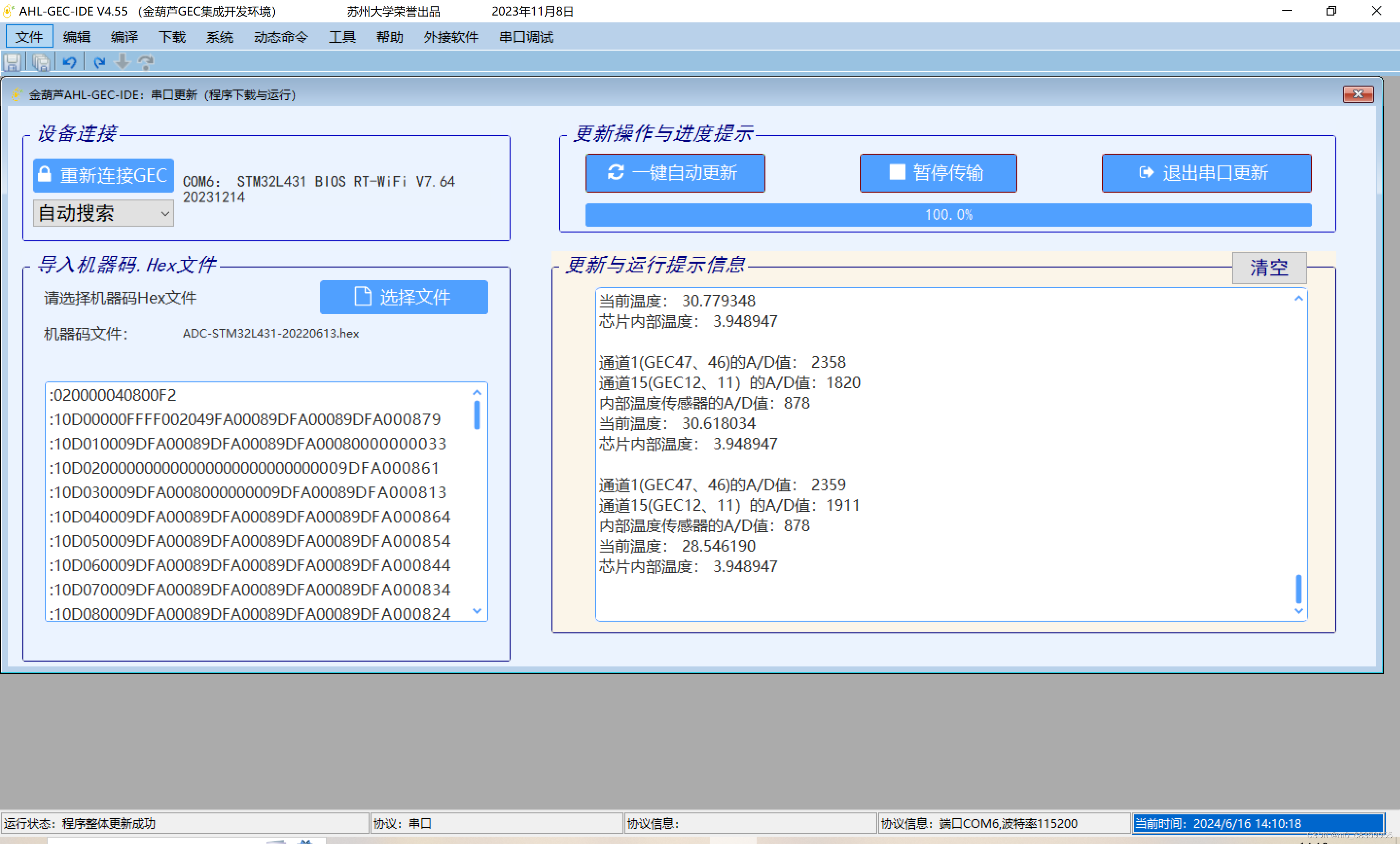
用手触摸芯片后,芯片内部温度上升
第十章作业
1、对于can的驱动函数文件加注释。在can(加注释).c中标了“//2024.6”的语句加以理解并写出注释。
//======================================================================
//文件名称:can.c
//功能概要:uart底层驱动构件源文件
//版权所有:苏州大学嵌入式系统与物联网研究所(sumcu.suda.edu.cn)
//更新记录:2021-02-03 V1.0 JJL
//======================================================================
#include "can.h"
CAN_TypeDef *CAN_ARR[] = {(CAN_TypeDef*)CAN1_BASE};
IRQn_Type table_irq_can[2] = {CAN1_RX0_IRQn, CAN1_RX1_IRQn};
uint8_t can_send_once(uint8_t canNo, uint32_t DestID, uint16_t len ,uint8_t* buff);
uint8_t CAN_HWInit(uint8_t CANChannel);
uint8_t CAN_SWInit_Entry(uint8_t canNo);
void CAN_SWInit_CTLMode(uint8_t canNo);
void CAN_SWInit_BT(uint8_t canNo, uint32_t CANMode, uint32_t Prescaler);
uint8_t CAN_SWInit_Quit(uint8_t canNo);
uint8_t CANFilterConfig(uint8_t canNo, uint32_t canID, uint32_t FilterBank, uint32_t Can_Rx_FifoNo, uint8_t IsActivate, uint32_t FilterMode, uint32_t FilterScale);
//=====================================================================
//函数名称:can_init
//函数返回:无
//参数说明:canNo:模块号,本芯片只有CAN_1
// canID:自身CAN节点的唯一标识,例如按照CANopen协议给出
// BitRate:位速率
//功能概要:初始化CAN模块
//=====================================================================
void can_init(uint8_t canNo, uint32_t canID, uint32_t BitRate)
{
//声明Init函数使用的局部变量
uint32_t CANMode;
uint32_t CANFilterBank;
uint32_t CANFiltermode;
uint32_t CAN_Filterscale;
//给Init函数使用的局部变量赋初值
CANMode = CAN_MODE_NORMAL; //2024.6 设置CAN模式为正常模式
CANFilterBank = CANFilterBank0;
CANFiltermode = CAN_FILTERMODE_IDMASK;
CAN_Filterscale = CAN_FILTERSCALE_32BIT;
//(1)CAN总线硬件初始化
CAN_HWInit(CAN_CHANNEL);
//(2)CAN总线进入软件初始化模式
CAN_SWInit_Entry(canNo);
//(3)CAN总线模式设置
CAN_SWInit_CTLMode(canNo);
//(4)CAN总线位时序配置
CAN_SWInit_BT(canNo,CANMode,BitRate);
//(5)CAN总线过滤器初始化
CANFilterConfig(canNo, canID, CANFilterBank, CAN_RX_FIFO0, 1, CANFiltermode, CAN_Filterscale);
//(6)CAN总线退出软件初始化模式,进入正常模式
CAN_SWInit_Quit(canNo);
}
//=====================================================================
//函数名称:can_send
//函数返回:0=正常,1=错误
//参数说明:canNo:模块号,本芯片只有CAN_1
// DestID:目标CAN节点的唯一标识,例如按照CANopen协议给出
// len:待发送数据的字节数
// buff:待发送数据发送缓冲区首地址
//功能概要:CAN模块发送数据
//=====================================================================
uint8_t can_send(uint8_t canNo, uint32_t DestID, uint16_t len ,uint8_t* buff)
{
if(DestID > 0x1FFFFFFFU) return 1;
uint8_t send_length;
for(int i = len; i > 0; i = i-8)
{
send_length = (i>8)?8:i;
if(can_send_once(canNo,DestID,send_length,buff+len-i) == 1) //2024.6 依据DestID向目标CAN节点发送缓冲区内长度为len的数据,每次发送8字节
{
return 1;
}
}
return 0;
}
//=====================================================================
//函数名称:can_recv
//函数返回:接收到的字节数
//参数说明:canNo:模块号,本芯片只有CAN_1
// buff:接收到的数据存放的内存区首地址
//功能概要:在CAN模块接收中断中调用本函数接收已经到达的数据
//=====================================================================
uint8_t can_recv(uint8_t canNo, uint8_t *buff)
{
uint8_t len;
uint32_t RxFifo = CAN_RX_FIFO0;
//(1)判断哪个邮箱收到了报文信息
if(RxFifo == CAN_RX_FIFO0)
{
if ((CAN_ARR[canNo-1]->RF0R & CAN_RF0R_FMP0) == 0U) //2024.6 检查CAN接收FIFO0是否有新的消息
{
return 1;
}
}
else
{
if ((CAN_ARR[canNo-1]->RF1R & CAN_RF1R_FMP1) == 0U)
{
return 1;
}
}
//(2)获取数据长度
len = (CAN_RDT0R_DLC & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDTR) >> CAN_RDT0R_DLC_Pos; //2024.6 从CAN接收FIFO中获取当前消息的数据长度
//(3)获取数据帧中的数据
buff[0] = (uint8_t)((CAN_RDL0R_DATA0 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDLR) >> CAN_RDL0R_DATA0_Pos);
buff[1] = (uint8_t)((CAN_RDL0R_DATA1 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDLR) >> CAN_RDL0R_DATA1_Pos);
buff[2] = (uint8_t)((CAN_RDL0R_DATA2 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDLR) >> CAN_RDL0R_DATA2_Pos);
buff[3] = (uint8_t)((CAN_RDL0R_DATA3 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDLR) >> CAN_RDL0R_DATA3_Pos);
buff[4] = (uint8_t)((CAN_RDH0R_DATA4 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDHR) >> CAN_RDH0R_DATA4_Pos);
buff[5] = (uint8_t)((CAN_RDH0R_DATA5 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDHR) >> CAN_RDH0R_DATA5_Pos);
buff[6] = (uint8_t)((CAN_RDH0R_DATA6 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDHR) >> CAN_RDH0R_DATA6_Pos);
buff[7] = (uint8_t)((CAN_RDH0R_DATA7 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDHR) >> CAN_RDH0R_DATA7_Pos);
//(4)清除标志位,等待接收下一帧数据
if (RxFifo == CAN_RX_FIFO0)
{
SET_BIT(CAN_ARR[canNo-1]->RF0R, CAN_RF0R_RFOM0); //2024.6 启用CAN接收FIFO 0的满中断
}
else
{
SET_BIT(CAN_ARR[canNo-1]->RF1R, CAN_RF1R_RFOM1);
}
return len;
}
//=====================================================================
//函数名称:CAN_enable_re_int
//函数返回:无
//参数说明:canNo:模块基地址号,Can_Rx_FifoNo:中断使用的邮箱号
//功能概要:CAN接收中断开启
//=====================================================================
void can_enable_recv_int(uint8_t canNo)
{
uint8_t Can_Rx_FifoNo;
Can_Rx_FifoNo = CAN_RX_FIFO0;
if(Can_Rx_FifoNo == CAN_RX_FIFO0)
SET_BIT(CAN_ARR[canNo-1]->IER, CAN_IER_FMPIE0);
else
SET_BIT(CAN_ARR[canNo-1]->IER,CAN_IER_FMPIE1);
NVIC_EnableIRQ(table_irq_can[Can_Rx_FifoNo]); //2024.6 使用NVIC(嵌套向量中断控制器)来启用与CAN接收FIFO相关的中断。
}
//=====================================================================
//函数名称:can_disable_recv_int
//函数返回:无
//参数说明:canNo:模块号,本芯片只有CAN_1
//功能概要:关闭CAN接收中断
//=====================================================================
void can_disable_recv_int (uint8_t canNo)
{
uint8_t Can_Rx_FifoNo;
Can_Rx_FifoNo = CAN_RX_FIFO0;
if(Can_Rx_FifoNo == CAN_RX_FIFO0)
CLEAR_BIT(CAN_ARR[canNo-1]->IER, CAN_IER_FMPIE0);
else
CLEAR_BIT(CAN_ARR[canNo-1]->IER,CAN_IER_FMPIE1);
NVIC_DisableIRQ(table_irq_can[Can_Rx_FifoNo]);
}
//=====================================================================
//函数名称:can_send_once
//函数返回:0=正常,1=错误
//参数说明:canNo:模块号,本芯片只有CAN_1
// DestID:目标CAN节点的唯一标识,例如按照CANopen协议给出
// len:待发送数据的字节数
// buff:待发送数据发送缓冲区首地址
//功能概要:CAN模块发送一次数据
//=====================================================================
uint8_t can_send_once(uint8_t canNo, uint32_t DestID, uint16_t len ,uint8_t* buff)
{
//(1)定义Can发送函数所需要用到的变量
uint32_t transmit_mailbox;
uint32_t register_tsr;
uint32_t rtr;
rtr = CAN_RTR_DATA;
register_tsr = READ_REG(CAN_ARR[canNo-1]->TSR);
//(2)判断3个邮箱中是否有空闲邮箱,若有,选取其中一个进行发送,选取顺序为1,2,3
if (((register_tsr & CAN_TSR_TME0) != 0U) ||
((register_tsr & CAN_TSR_TME1) != 0U) ||
((register_tsr & CAN_TSR_TME2) != 0U))
{
transmit_mailbox = (register_tsr & CAN_TSR_CODE) >> CAN_TSR_CODE_Pos; //2024.6 计算并获取一个可用于发送的CAN邮箱编号
if(transmit_mailbox > 2U)
{
return 1;
}
//(2.1)判断并设置发送帧为标准帧还是扩展帧
if(DestID <= 0x7FFU) //2024.6 检查目标CAN节点的标识符是否适合使用标准帧格式(11位ID)
{
CAN_ARR[canNo-1]->sTxMailBox[transmit_mailbox].TIR = ((DestID << CAN_TI0R_STID_Pos)|CAN_ID_STD|rtr); //2024.6 设置传输邮箱的TIR寄存器,配置消息的ID、帧类型(标准帧)和远程传输请求(RTR)。
}
else
{
CAN_ARR[canNo-1]->sTxMailBox[transmit_mailbox].TIR = ((DestID << CAN_TI0R_EXID_Pos)|CAN_ID_EXT|rtr); //2024.6 设置传输邮箱的TIR寄存器,配置消息的ID、帧类型(标准帧)和远程传输请求(RTR)。
}
//(2.2)设置发送帧的数据长度
CAN_ARR[canNo-1]->sTxMailBox[transmit_mailbox].TDTR = len;
//SET_BIT(CAN_ARR[canNo-1]->sTxMailBox[transmit_mailbox].TDTR, CAN_TDT0R_TGT);
//(2.3)设置发送帧的数据
WRITE_REG(CAN_ARR[canNo-1]->sTxMailBox[transmit_mailbox].TDHR, //2024.6 逐位写入数据,寄存器的高位
((uint32_t)buff[7] << CAN_TDH0R_DATA7_Pos) |
((uint32_t)buff[6] << CAN_TDH0R_DATA6_Pos) |
((uint32_t)buff[5] << CAN_TDH0R_DATA5_Pos) |
((uint32_t)buff[4] << CAN_TDH0R_DATA4_Pos));
WRITE_REG(CAN_ARR[canNo-1]->sTxMailBox[transmit_mailbox].TDLR,
((uint32_t)buff[3] << CAN_TDL0R_DATA3_Pos) |
((uint32_t)buff[2] << CAN_TDL0R_DATA2_Pos) |
((uint32_t)buff[1] << CAN_TDL0R_DATA1_Pos) |
((uint32_t)buff[0] << CAN_TDL0R_DATA0_Pos));
//(2.4)发送Can数据报
SET_BIT(CAN_ARR[canNo-1]->sTxMailBox[transmit_mailbox].TIR, CAN_TI0R_TXRQ); //2024.6 将所选邮箱内的TIR置位,请求发送数据
return 0;
}
else
{
return 1;
}
}
//=====================================================================
//函数名称:CAN_HWInit
//函数返回:0=正常,1=错误
//参数说明:CANChannel:硬件引脚组号,共有3组,分别为PTA11&PTA12(CAN_CHANNEL0),PTB8&PTB9(CAN_CHANNEL1),PTD0&PTD1(2)
//功能概要:CAN模块引脚初始化
//=====================================================================
uint8_t CAN_HWInit(uint8_t CANChannel)
{
if(CANChannel < 0 || CANChannel > 2)
{
return 1;
}
if(CANChannel == 0)
{
RCC->APB1ENR1 |= RCC_APB1ENR1_CAN1EN; //2024.6 使能CAN1模块的时钟
RCC->AHB2ENR |= RCC_AHB2ENR_GPIOAEN;
GPIOA->MODER &= ~(GPIO_MODER_MODE11|GPIO_MODER_MODE12);
GPIOA->MODER |= (GPIO_MODER_MODE11_1|GPIO_MODER_MODE12_1); //2024.6 设置引脚为复用功能模式
GPIOA->AFR[1] &= ~(GPIO_AFRH_AFSEL11|GPIO_AFRH_AFSEL12);
GPIOA->AFR[1] |= (GPIO_AFRH_AFSEL11_0|GPIO_AFRH_AFSEL11_3)|(GPIO_AFRH_AFSEL12_0|GPIO_AFRH_AFSEL12_3); //2024.6 //设置引脚为CAN复用功能
}
else if(CANChannel == 1)
{
RCC->APB1ENR1 |= RCC_APB1ENR1_CAN1EN;
RCC->AHB2ENR |= RCC_AHB2ENR_GPIOBEN;
GPIOB->MODER &= ~(GPIO_MODER_MODE8|GPIO_MODER_MODE9);
GPIOB->MODER |= (GPIO_MODER_MODE8_1|GPIO_MODER_MODE9_1);
GPIOB->AFR[1] &= ~(GPIO_AFRH_AFSEL8|GPIO_AFRH_AFSEL9);
GPIOB->AFR[1] |= ((GPIO_AFRH_AFSEL8_0|GPIO_AFRH_AFSEL8_3)|
(GPIO_AFRH_AFSEL9_0|GPIO_AFRH_AFSEL9_3));
}
else
{
RCC->APB1ENR1 |= RCC_APB1ENR1_CAN1EN;
RCC->AHB2ENR |= RCC_AHB2ENR_GPIODEN;
GPIOD->MODER &= ~(GPIO_MODER_MODE0|GPIO_MODER_MODE1);
GPIOD->MODER |= (GPIO_MODER_MODE0_1|GPIO_MODER_MODE1_1);
GPIOD->AFR[0] &= ~(GPIO_AFRL_AFSEL0|GPIO_AFRL_AFSEL1);
GPIOD->AFR[0] |= ((GPIO_AFRL_AFSEL0_0 | GPIO_AFRL_AFSEL0_3)|
(GPIO_AFRL_AFSEL1_0 | GPIO_AFRL_AFSEL1_3));
}
return 0;
}
//=====================================================================
//函数名称:CAN_SWInit_Entry
//函数返回:0=正常,1=错误
//参数说明:canNo:模块基地址号,本芯片只有CAN_1,
//功能概要:进入初始化模式
//=====================================================================
uint8_t CAN_SWInit_Entry(uint8_t canNo)
{
int i;
CLEAR_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_SLEEP); //2024.6 清除了CAN_MCR寄存器中的CAN_MCR_SLEEP位,以退出CAN模块的睡眠模式。
i = 0;
while ((CAN_ARR[canNo-1]->MSR & CAN_MSR_SLAK) != 0U) //2024.6 如果等待时间过长(超过0x30000次循环),则返回错误
{
if(i++ > 0x30000)
{
return 1;
}
}
SET_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_INRQ); //2024.6 进入CAN模块的初始化模式
i = 0;
while ((CAN_ARR[canNo-1]->MSR & CAN_MSR_INAK) == 0U)
{
if(i++ > 0x30000)
{
return 1;
}
}
return 0;
}
//=====================================================================
//函数名称:CAN_SWInit_CTLMode
//函数返回:无
//参数说明:canNo:模块基地址号,本芯片只有CAN_1,
//功能概要:CAN总线模式设置
//=====================================================================
void CAN_SWInit_CTLMode(uint8_t canNo)
{
CLEAR_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_TTCM); //2024.6 禁用时间触发通信模式
CLEAR_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_ABOM); //2024.6 禁用自动总线关闭功能
CLEAR_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_AWUM); //2024.6 禁用自动唤醒功能
SET_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_NART); //2024.6 禁用自动重传功能
CLEAR_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_RFLM); //2024.6 禁用接收FIFO锁定功能
CLEAR_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_TXFP); //2024.6 清除FIFO优先级模式
}
//函数名称:CAN_SWInit_CTLMode
//函数返回:无
//参数说明:canNo:模块基地址号,本芯片只有CAN_1,
// CANMode:CAN总线工作模式,分别为正常模式(CAN_MODE_NORMAL)、回环模式(CAN_MODE_LOOPBACK)、
// 静默模式(CAN_MODE_SILENT)以及回环与静默组合模式(CAN_MODE_SILENT_LOOPBACK)
//功能概要:CAN总线位时序配置
void CAN_SWInit_BT(uint8_t canNo, uint32_t CANMode, uint32_t Prescaler)
{
CAN_ARR[canNo-1]->BTR |= ((uint32_t)(Prescaler-1)|CAN_SJW_1TQ|CAN_BTR_TS1_1|CAN_BTR_TS1_0|CAN_BTR_TS2_2|CANMode); //2024.6 配置了CAN位时序寄存器(BTR),设置了预分频器、同步跳位宽度(SJW)、时间段(TS1和TS2)和CAN模式
}
//=====================================================================
//函数名称:CAN_SWInit_Quit
//函数返回:0=正常,1=错误
//参数说明:canNo:模块基地址号
//功能概要:退出初始化模式,进入正常模式
//=====================================================================
uint8_t CAN_SWInit_Quit(uint8_t canNo)
{
int i;
CLEAR_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_INRQ); //2024.6 清除了CAN_MCR寄存器中的CAN_MCR_INRQ位,以退出CAN模块的初始化模式。
i = 0;
while ((CAN_ARR[canNo-1]->MSR & CAN_MSR_INAK) != 0U) //2024.6 检查MSR寄存器中的INAK位,直到其变为0
{
if (i++ > 0x30000)
{
return 1;
}
}
return 0;
}
//=====================================================================
//函数名称: CANFilterConfig
//函数返回:0=正常,1=错误
//参数说明: canNo:模块基地址号,
// canID:自身CAN节点的唯一标识,例如按照CANopen协议给出
// Can_Rx_FifoNo:中断使用的邮箱号,
// IsActivate:是否激活过滤器
// CANFilterBank:CAN总线过滤器组选择,共有28个,(CANFilterBank0~CANFilterBank27)
// CANFiltermode:CAN总线过滤器模式,分别为掩码模式(CAN_FILTERMODE_IDMASK)和列表模式(CAN_FILTERMODE_IDLIST)
// CAN_Filterscale:CAN总线过滤器位数,分别为32位(CAN_FILTERSCALE_32BIT)和16位(CAN_FILTERSCALE_16BIT)
//功能概要:CAN接收中断开启
//=====================================================================
uint8_t CANFilterConfig(uint8_t canNo, uint32_t CanID, uint32_t FilterBank, uint32_t Can_Rx_FifoNo, uint8_t IsActivate, uint32_t FilterMode, uint32_t FilterScale)
{
uint32_t FilterIdHigh, FilterIdLow, FilterMaskIdHigh, FilterMaskIdLow, filternbrbitpos;
if(CanID <= 0x7FFU) CanID = CanID << CAN_TI0R_STID_Pos; //2024.6 换为标准ID格式
FilterIdHigh = (CanID >> 16) & 0xFFFF; //2024.6 将CAN ID拆分为高低两部分
FilterIdLow = (CanID & 0xFFFF);
FilterMaskIdHigh = 0xFFE0; //2024.6 设置高位过滤器掩码
FilterMaskIdLow = 0x0000; //2024.6 设置低位过滤器掩码
filternbrbitpos = (uint32_t)1 << (FilterBank & 0x1FU);
//设置过滤器初始化模式 (FINIT=1),在此模式下可以进行过滤器初始化
SET_BIT(CAN_ARR[canNo-1]->FMR, CAN_FMR_FINIT); //2024.6 设置了CAN_FMR寄存器中的CAN_FMR_FINIT位,以进入过滤器初始化模式。
CLEAR_BIT(CAN_ARR[canNo-1]->FA1R, filternbrbitpos); //2024.6 清除了CAN_FA1R寄存器中的相应位,以选择过滤器编号。
if (FilterScale == CAN_FILTERSCALE_16BIT)
{
CLEAR_BIT(CAN_ARR[canNo-1]->FS1R, filternbrbitpos);
CAN_ARR[canNo-1]->sFilterRegister[FilterBank].FR1 =
((0x0000FFFFU & (uint32_t)FilterMaskIdLow) << 16U) |
(0x0000FFFFU & (uint32_t)FilterIdLow);
CAN_ARR[canNo-1]->sFilterRegister[FilterBank].FR2 =
((0x0000FFFFU & (uint32_t)FilterMaskIdHigh) << 16U) |
(0x0000FFFFU & (uint32_t)FilterIdHigh);
}
if (FilterScale == CAN_FILTERSCALE_32BIT) //2024.6 过滤器大小为32位的情况
{
SET_BIT(CAN_ARR[canNo-1]->FS1R, filternbrbitpos); //2024.6 设置了CAN_FS1R寄存器中的相应位,以选择过滤器的规模。
CAN_ARR[canNo-1]->sFilterRegister[FilterBank].FR1 = //2024.6 设置了过滤器寄存器的FR1字段,用于配置过滤器的ID或掩码。
((0x0000FFFFU & (uint32_t)FilterIdHigh) << 16U) |
(0x0000FFFFU & (uint32_t)FilterIdLow);
CAN_ARR[canNo-1]->sFilterRegister[FilterBank].FR2 =
((0x0000FFFFU & (uint32_t)FilterMaskIdHigh) << 16U) |
(0x0000FFFFU & (uint32_t)FilterMaskIdLow);
}
if (FilterMode == CAN_FILTERMODE_IDMASK) //2024.6 据过滤器模式选择掩码模式或列表模式
{
CLEAR_BIT(CAN_ARR[canNo-1]->FM1R, filternbrbitpos); //2024.6 选择掩码模式
}
else
{
SET_BIT(CAN_ARR[canNo-1]->FM1R, filternbrbitpos);
}
if (Can_Rx_FifoNo == CAN_FILTER_FIFO0) //2024.6 根据接收FIFO选择配置过滤器关联的FIFO
{
CLEAR_BIT(CAN_ARR[canNo-1]->FFA1R, filternbrbitpos); //2024.6 过滤器关联到FIFO0
}
else
{
SET_BIT(CAN_ARR[canNo-1]->FFA1R, filternbrbitpos);
}
if (IsActivate == 1) //2024.6 如果需要激活过滤器
{
SET_BIT(CAN_ARR[canNo-1]->FA1R, filternbrbitpos); //2024.6 激活对应过滤器组
}
//退出过滤器初始化模式 (FINIT=0)
CLEAR_BIT(CAN_ARR[canNo-1]->FMR, CAN_FMR_FINIT); //2024.6 退出过滤器初始化模式。
return 0;
}
2、2个或以上同学相互连接,利用CAN通信,向对方发送带有本人姓名的信息。连线方式:按基本原理性电路(不带收发器芯片)连接。
连线图:
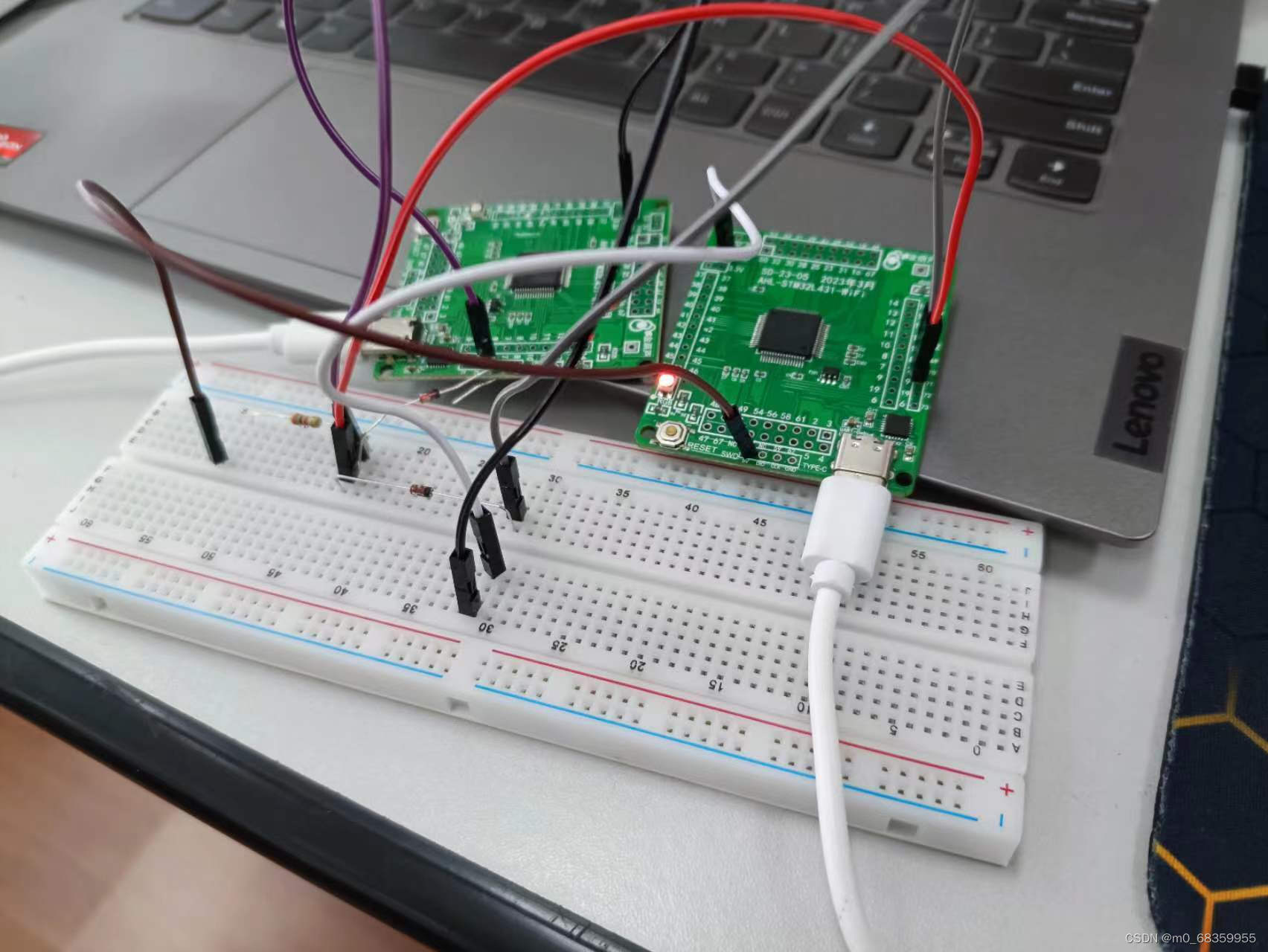
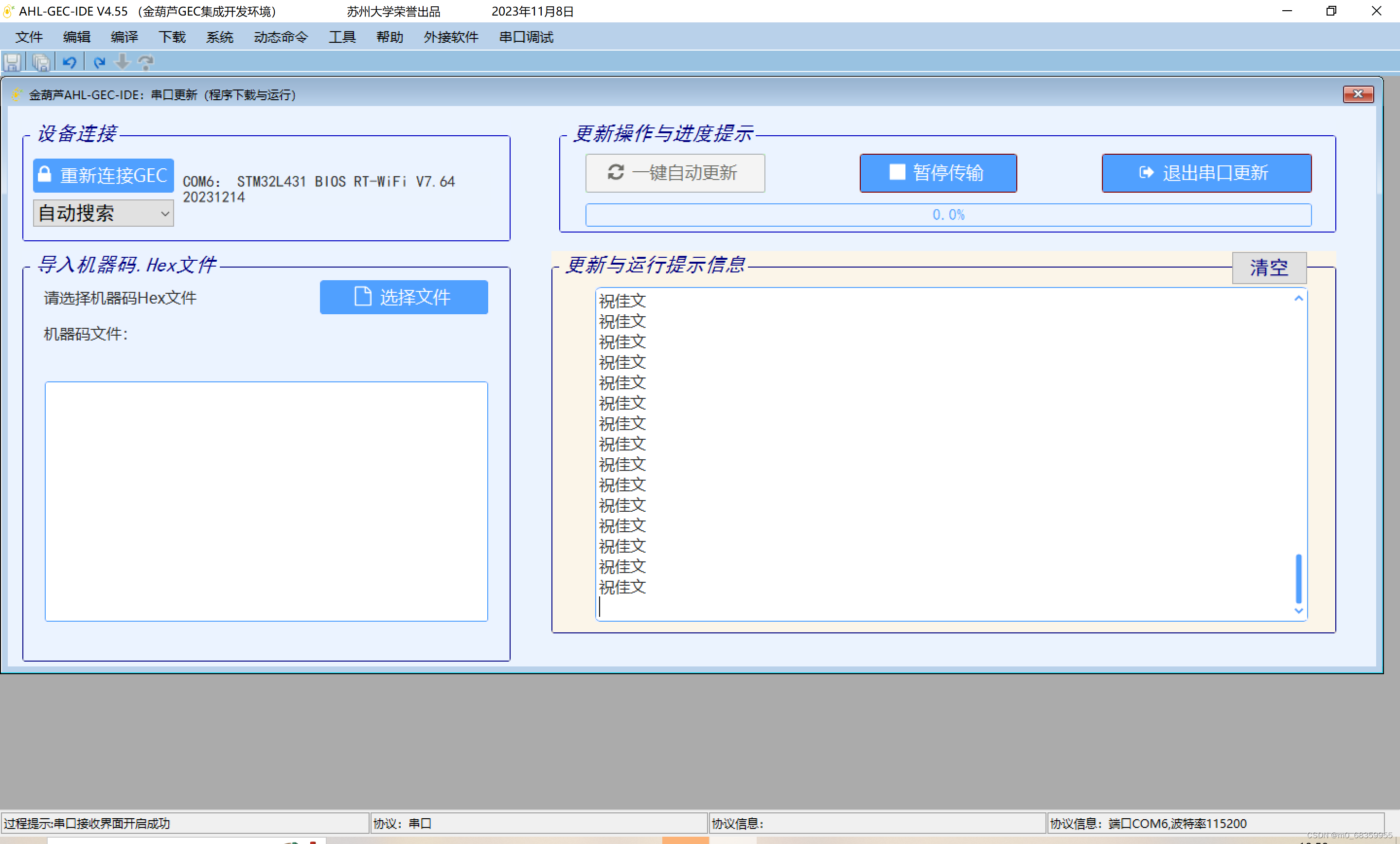
开发板A:
#define GLOBLE_VAR
#include "includes.h" //包含总头文件
//----------------------------------------------------------------------
//声明使用到的内部函数
//main.c使用的内部函数声明处
//----------------------------------------------------------------------
//主函数,一般情况下可以认为程序从此开始运行(实际上有启动过程,参见书稿)
int main(void)
{
//(1)======启动部分(开头)==========================================
//(1.1)声明main函数使用的局部变量
vuint32_t mMainLoopCount; //主循环次数变量
uint8_t mFlag; //灯的状态标志
uint32_t mLightCount; //灯的状态切换次数
uint32_t localMsgID;
uint32_t txMsgID;
uint32_t BitRate;
//(1.2)【不变】关总中断
DISABLE_INTERRUPTS;
//(1.3)给主函数使用的局部变量赋初值
mMainLoopCount=0; //主循环次数变量
mFlag='A'; //灯的状态标志
mLightCount=0; //灯的闪烁次数
localMsgID = 0x0AU;
txMsgID = 0x0BU;
BitRate = 36;
//(1.4)给全局变量赋初值
//(1.5)用户外设模块初始化
gpio_init(LIGHT_RED,GPIO_OUTPUT,LIGHT_ON); //初始化蓝灯
emuart_init(UART_User,115200);
uart_init(UART_3,115200);
//【***CAN模块初始化***】
can_init(CAN_1,localMsgID,BitRate);
//(1.6)使能模块中断
uart_enable_re_int(UART_User);
uart_enable_re_int(UART_3);
//【***使能CAN模块中断***】
can_enable_recv_int(CAN_1);
//(1.7)【不变】开总中断
ENABLE_INTERRUPTS;
//(1)======启动部分(结尾)==========================================
//(2)======主循环部分(开头)========================================
for(;;) //for(;;)(开头)
{
//(2.1)主循环次数变量+1
mMainLoopCount++;
//(2.2)未达到主循环次数设定值,继续循环
if (mMainLoopCount<=12889000) continue;
//(2.3)达到主循环次数设定值,执行下列语句,进行灯的亮暗处理
//(2.3.1)清除循环次数变量
mMainLoopCount=0;
//(2.3.2)如灯状态标志mFlag为'L',灯的闪烁次数+1并显示,改变灯状态及标志
if (mFlag=='L') //判断灯的状态标志
{
mLightCount++;
//printf("灯的闪烁次数 mLightCount = %d\n",mLightCount);
mFlag='A'; //灯的状态标志
gpio_set(LIGHT_RED,LIGHT_ON); //灯“亮”
//printf(" LIGHT_RED:ON--\n"); //串口输出灯的状态
//【***CAN模块发送一帧数据***】
if(can_send(CAN_1, txMsgID, 8, (uint8_t*)"章郑杰\r\n") != 0) printf("failed\r\n");
}
//(2.3.3)如灯状态标志mFlag为'A',改变灯状态及标志
else
{
mFlag='L'; //灯的状态标志
gpio_set(LIGHT_RED,LIGHT_OFF); //灯“暗”
//printf(" LIGHT_RED:OFF--\n"); //串口输出灯的状态
}
} //for(;;)结尾
//(2)======主循环部分(结尾)========================================
} //main函数(结尾)
//======以下为主函数调用的子函数===========================================
//========================================================================
/*
知识要素:
(1)main.c是一个模板,该文件所有代码均不涉及具体的硬件和环境,通过调用构件
实现对硬件的干预。
(2)本文件中对宏GLOBLE_VAR进行了定义,所以在包含"includes.h"头文件时,会定
义全局变量,在其他文件中包含"includes.h"头文件时,
编译时会自动增加extern
*/
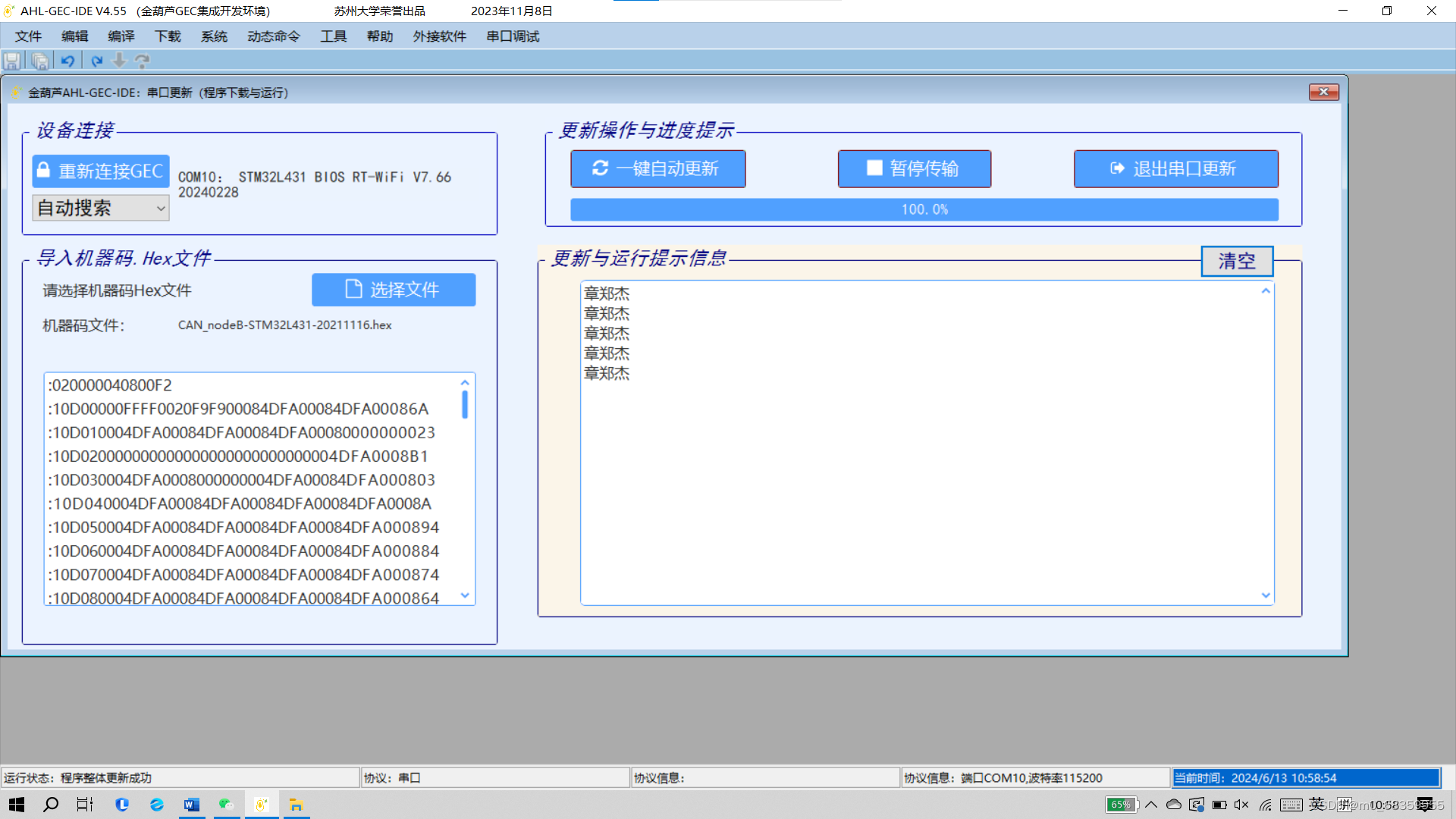
开发板B:
#define GLOBLE_VAR
#include "includes.h" //包含总头文件
//----------------------------------------------------------------------
//声明使用到的内部函数
//main.c使用的内部函数声明处
//----------------------------------------------------------------------
//主函数,一般情况下可以认为程序从此开始运行(实际上有启动过程,参见书稿)
int main(void)
{
//(1)======启动部分(开头)==========================================
//(1.1)声明main函数使用的局部变量
vuint32_t mMainLoopCount; //主循环次数变量
uint8_t mFlag; //灯的状态标志
uint32_t mLightCount; //灯的状态切换次数
uint32_t localMsgID;
uint32_t txMsgID;
uint32_t BitRate;
//(1.2)【不变】关总中断
DISABLE_INTERRUPTS;
//(1.3)给主函数使用的局部变量赋初值
mMainLoopCount=0; //主循环次数变量
mFlag='A'; //灯的状态标志
mLightCount=0; //灯的闪烁次数
localMsgID = 0x0BU;
txMsgID = 0x0AU;
BitRate = 36;
//(1.4)给全局变量赋初值
//(1.5)用户外设模块初始化
gpio_init(LIGHT_RED,GPIO_OUTPUT,LIGHT_ON); //初始化蓝灯
emuart_init(UART_User,115200);
uart_init(UART_3,115200);
//【***CAN模块初始化***】
can_init(CAN_1,localMsgID,BitRate);
//(1.6)使能模块中断
uart_enable_re_int(UART_User);
uart_enable_re_int(UART_3);
//【***使能CAN模块中断***】
can_enable_recv_int(CAN_1);
//(1.7)【不变】开总中断
ENABLE_INTERRUPTS;
//(1)======启动部分(结尾)==========================================
//(2)======主循环部分(开头)========================================
for(;;) //for(;;)(开头)
{
//(2.1)主循环次数变量+1
mMainLoopCount++;
//(2.2)未达到主循环次数设定值,继续循环
if (mMainLoopCount<=12889000) continue;
//(2.3)达到主循环次数设定值,执行下列语句,进行灯的亮暗处理
//(2.3.1)清除循环次数变量
mMainLoopCount=0;
//(2.3.2)如灯状态标志mFlag为'L',灯的闪烁次数+1并显示,改变灯状态及标志
if (mFlag=='L') //判断灯的状态标志
{
mLightCount++;
//printf("灯的闪烁次数 mLightCount = %d\n",mLightCount);
mFlag='A'; //灯的状态标志
gpio_set(LIGHT_RED,LIGHT_ON); //灯“亮”
//printf(" LIGHT_RED:ON--\n"); //串口输出灯的状态
//【***CAN模块发送一帧数据***】
if(can_send(CAN_1, txMsgID, 8, (uint8_t*)"祝佳文\r\n") != 0) printf("failed\r\n");
}
//(2.3.3)如灯状态标志mFlag为'A',改变灯状态及标志
else
{
mFlag='L'; //灯的状态标志
gpio_set(LIGHT_RED,LIGHT_OFF); //灯“暗”
//printf(" LIGHT_RED:OFF--\n"); //串口输出灯的状态
}
} //for(;;)结尾
//(2)======主循环部分(结尾)========================================
} //main函数(结尾)
//======以下为主函数调用的子函数===========================================
//========================================================================
/*
知识要素:
(1)main.c是一个模板,该文件所有代码均不涉及具体的硬件和环境,通过调用构件
实现对硬件的干预。
(2)本文件中对宏GLOBLE_VAR进行了定义,所以在包含"includes.h"头文件时,会定
义全局变量,在其他文件中包含"includes.h"头文件时,
编译时会自动增加extern
*/
运行结果:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









