






三菱FX1S单轴程序,程序结构清晰,注释明了,轴的点动,回零,相对定位,绝对定位控制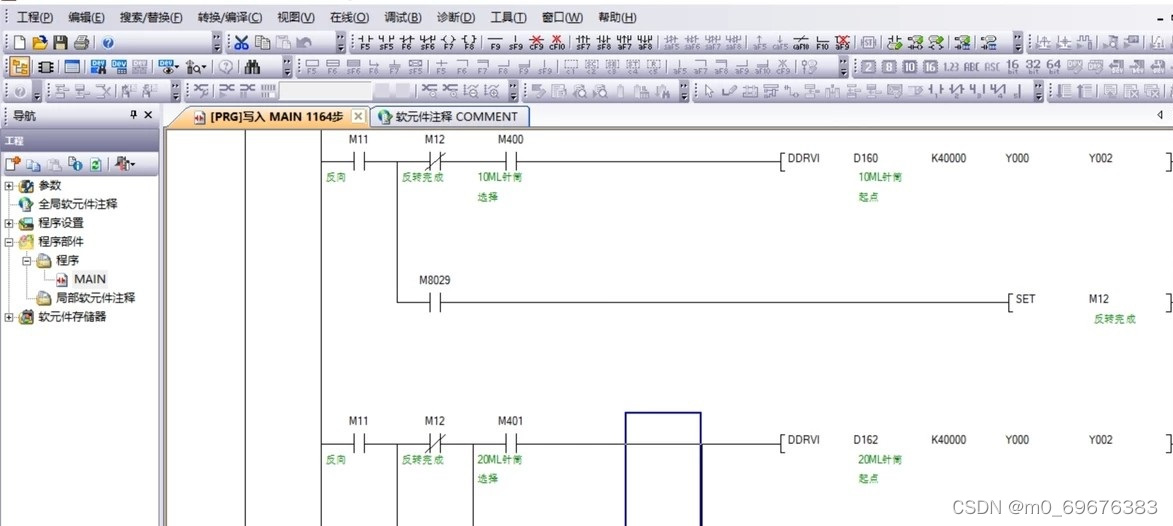
ID:6916641408152679 非标自动化电控设计
非标自动化电控设计

















 1万+
1万+
评论

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
查看更多评论
添加红包

 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






