






今天记录13周高庆老师的线性系统课程
每次开始前都先讲解上周题目
1.题目
题目后面补充
1.1
1.2
2.课程
2.1 Schur complement
2.2 T-S模糊模型
2.3 D-T T-S 模糊模型
当
原式为
当
原式为
运算和上面类似,最后得到
当...
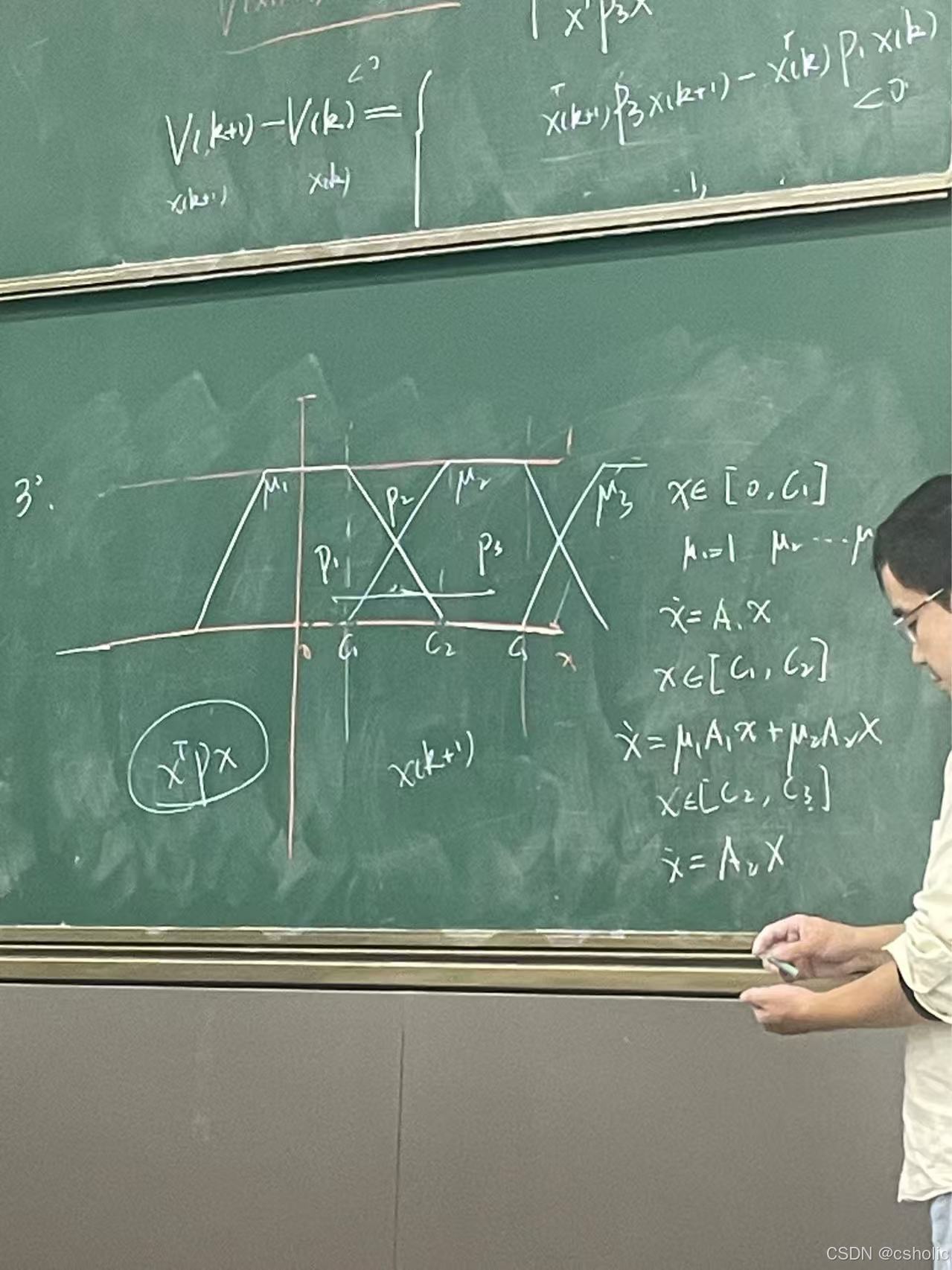
老师画的图没懂,后面再来补充,这里用到2.4Lyapunox函数
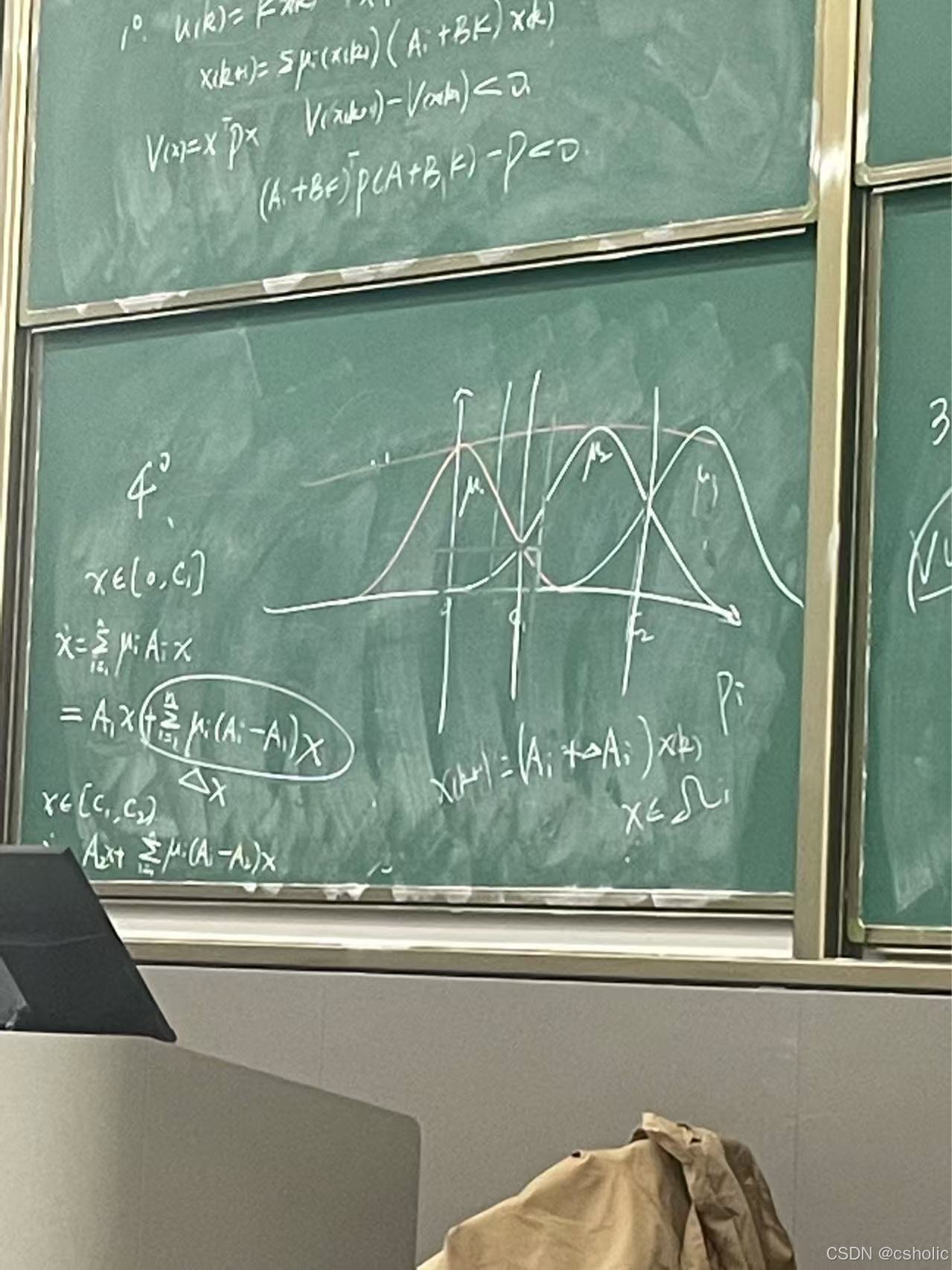
当
同样也不知道老师在说什么,后面懂了再来补充
2.4 Lyapunox函数
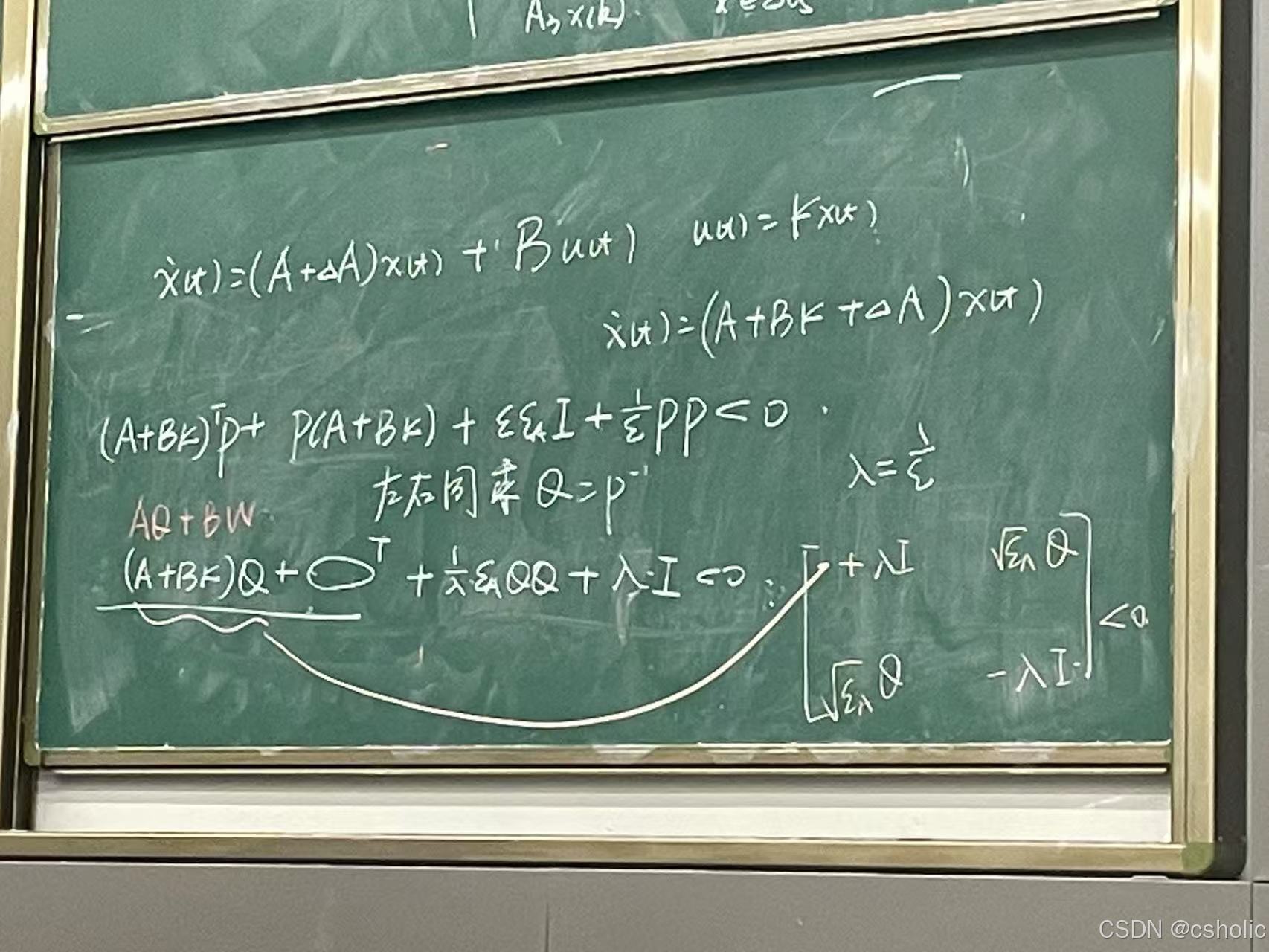
2.5 不确定性系统
3.下周的作业
3.1
假设
可以分段描述为
选择Lyapunox函数给出系统稳定性判据


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









