






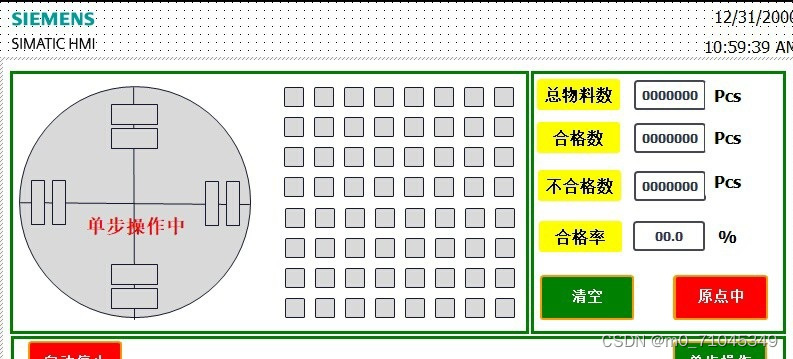
1)触摸屏是西门子Tp900,
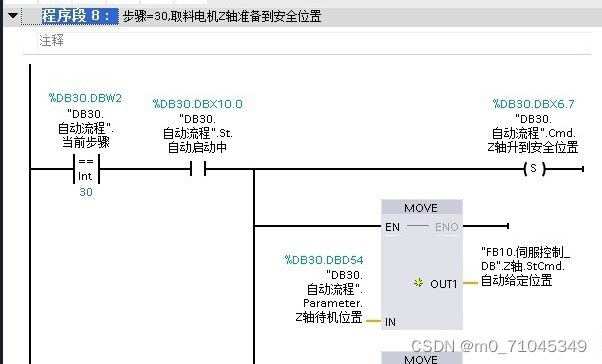
2)3轴伺服PTO,脉冲加方向控制
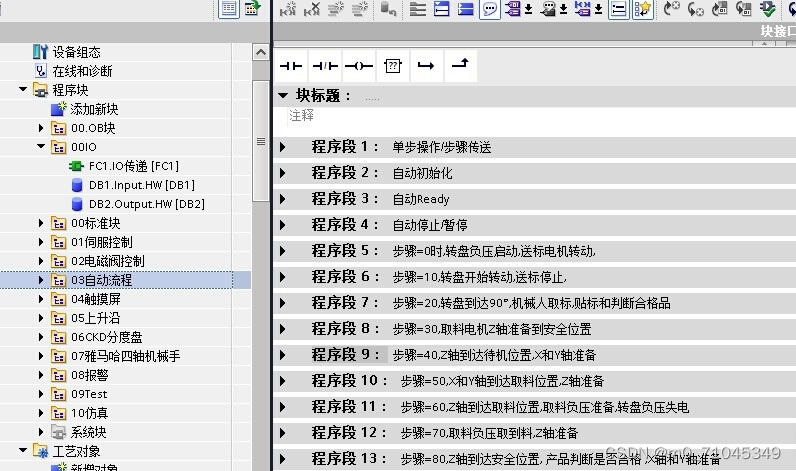
3)梯形图和SCl编写,
4 )编程思路清晰:FB块和DB块的规划,结构化编程,使用多重背景和UDT快速实现对多台同类型的设备的快速编程
5)模式清晰:手动,自动,报警,io映射,
6)执行器多样:机械手,分斗盘,电磁阀,伺服电机,步进电机,拿照系统。
使用控制字和背景静态变量访问,参考老外的编程思路,程序段与变量都有中文注解,非常适合学习
 YID:6910
YID:6910 672115359213
672115359213

1)触摸屏是西门子Tp900,
2)3轴伺服PTO,脉冲加方向控制
3)梯形图和SCl编写,
4 )编程思路清晰:FB块和DB块的规划,结构化编程,使用多重背景和UDT快速实现对多台同类型的设备的快速编程
5)模式清晰:手动,自动,报警,io映射,
6)执行器多样:机械手,分斗盘,电磁阀,伺服电机,步进电机,拿照系统。
使用控制字和背景静态变量访问,参考老外的编程思路,程序段与变量都有中文注解,非常适合学习
YID:6910672115359213
 2896
4921
2896
4921











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言























