




1.下载mltbx文件
方法一:从官网下载 : PeterCorke.com ,直接点击DOWNLOAD即可。(尝试了很多次才下载下来,官网很慢)
方法二:从百度网盘提取(我已经上传到百度网盘啦)
链接:https://pan.baidu.com/s/1ch5MivLJD91Hyst35U5c5A
提取码:63ec
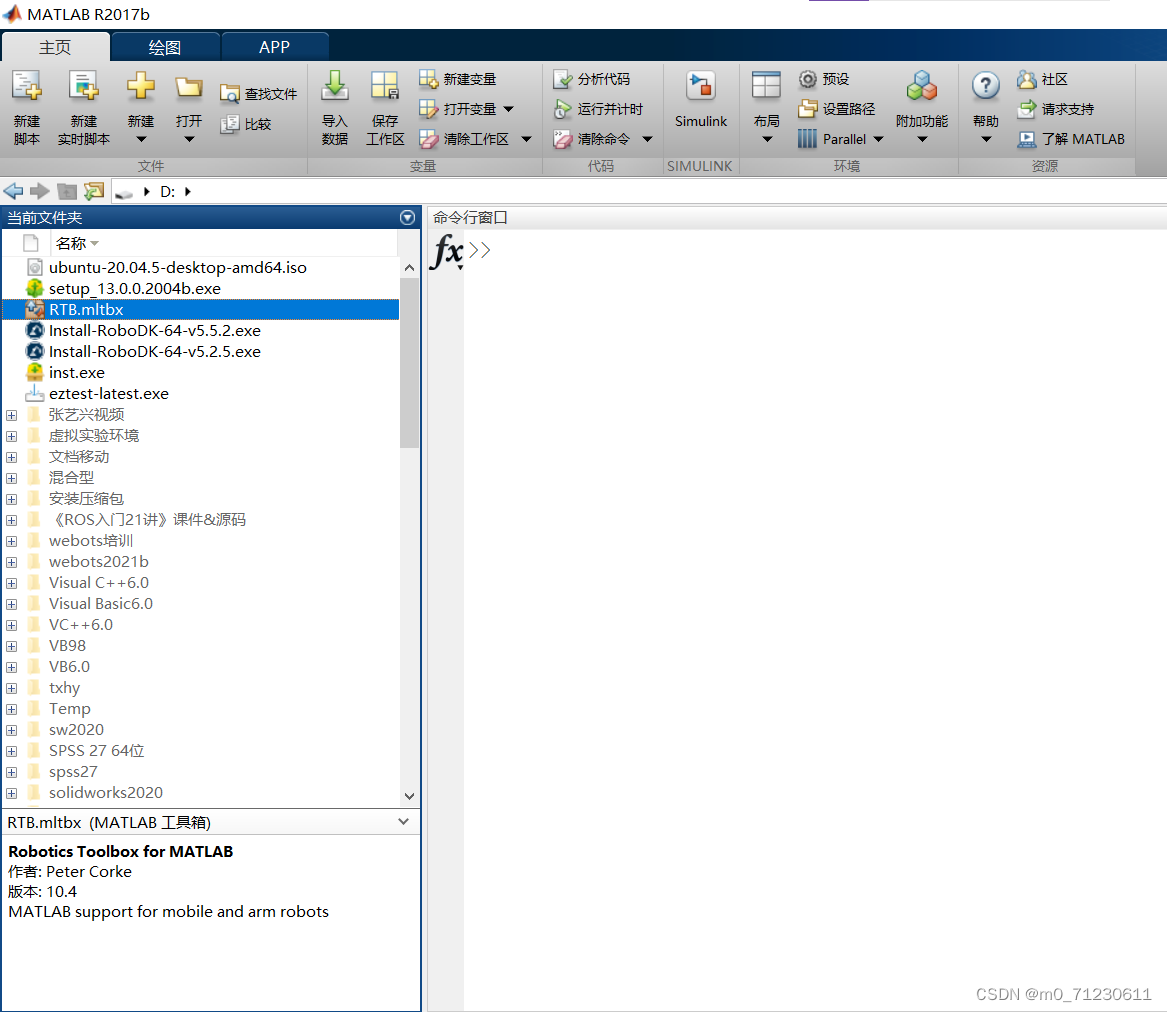
2.从matlab中左上角点击浏览文件夹打开mltbx文件所在文件夹(我放到了D盘)
3.在打开的文件夹中直接双击RTB.mltbx文件。
 4.在matlab命令行输入 ver,发现Robotics Toolbox for MATLAB 版本10.4,安装成功。
4.在matlab命令行输入 ver,发现Robotics Toolbox for MATLAB 版本10.4,安装成功。


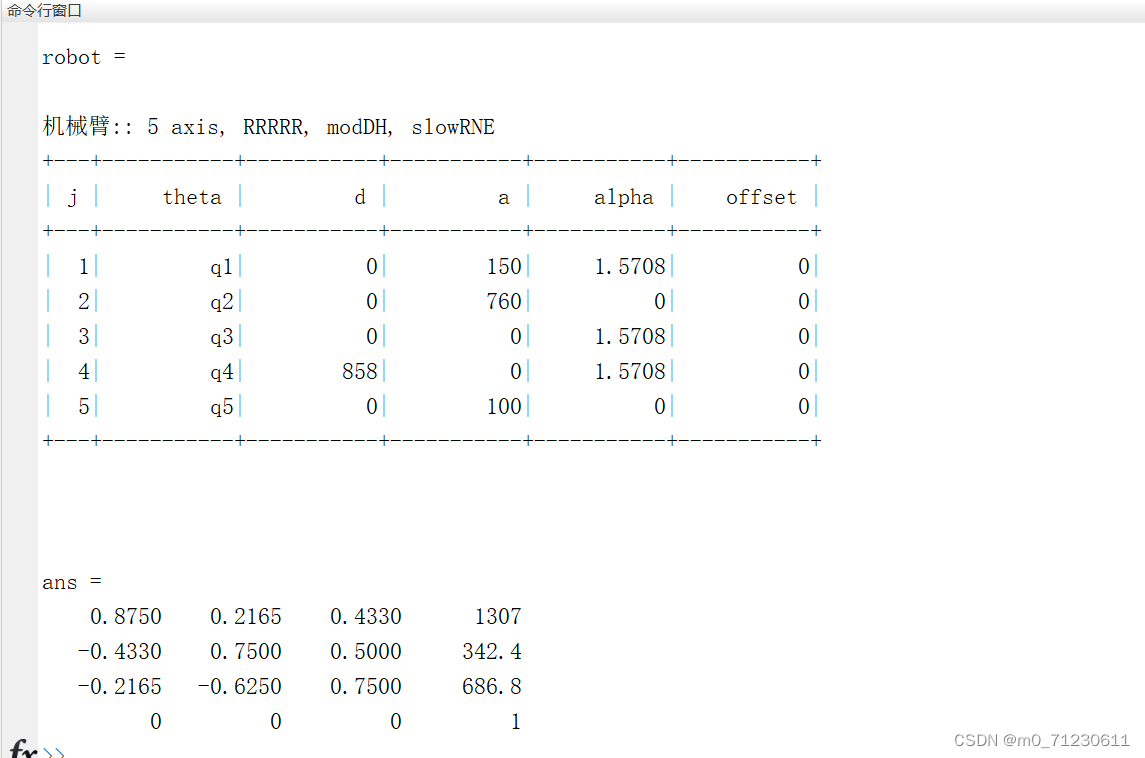
5.在matlab中进行MDH建模并运行
clear
clc
% theta(关节角) d(连杆偏距) a(连杆长度) alpha(连杆转角) sigma
L(1) = Link([0 0 150 pi/2 0],'modified');
L(2) = Link([0 0 760 0 0],'modified');
L(3) = Link([0 0 0 pi/2 0],'modified');
L(4) = Link([0 858 0 pi/2 0],'modified');
L(5) = Link([0 0 100 0 0],'modified');
robot = SerialLink(L, 'name' , '机械臂'); %建立模型
robot.display(); %显示建立的机器人的DH参数
%设置模型空间大小和地砖大小
robot.plotopt = {'workspace',[-2500,2500,-2500,2500,-2500,2500],'tilesize',2500};
robot.teach; %画出模型并进行调控
%robot.plot([0 pi/3 pi/3 0 pi/3])%输入一定参数后机器人图形
robot.fkine([0 pi/3 pi/3 0 pi/3])
hold on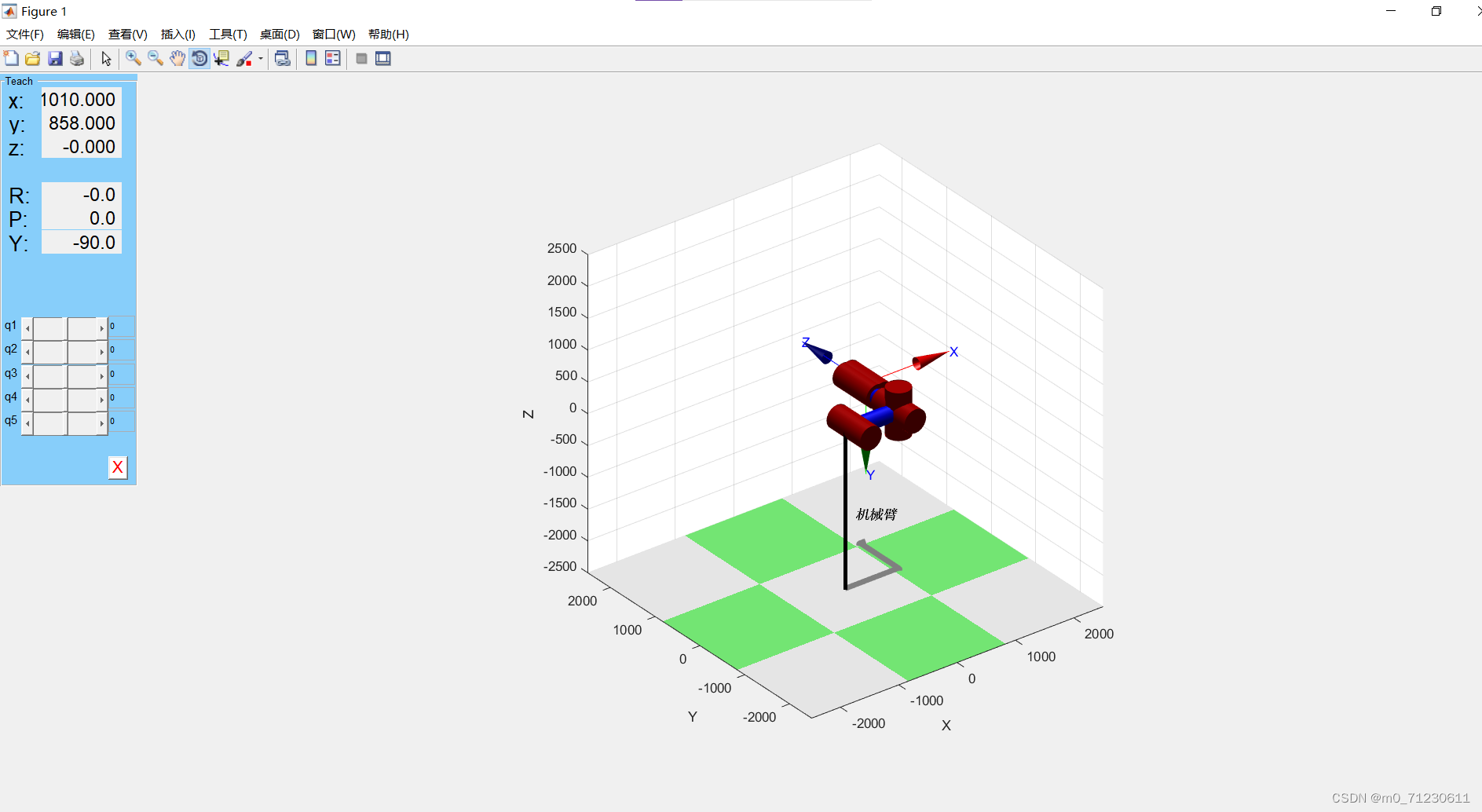
目录
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2213
2213

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









